


-
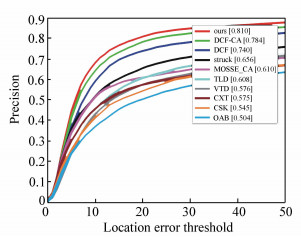
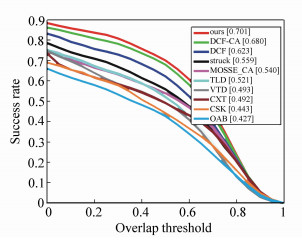
摘要: 针对上下文感知相关滤波目标跟踪算法中,上下文背景样本等值权重训练,对背景信息滤波过于平滑的问题,提出了一种自适应上下文感知相关滤波算法,同时为了解决目标遮挡的问题,引入一种新的遮挡判定指标。首先,提取目标上下左右4个方向的背景样本学习到滤波器中,利用卡尔曼滤波对目标运动状态进行估计,预测目标的运动方向。在滤波器训练时,对目标运动方向上的背景样本训练时赋予较多的权重;接着,在模型更新时引入一个新的遮挡判定指标APCE,只有当响应峰值和APCE数值分别一定比例大于各自的历史均值时,才对目标模型进行更新;最后将本文算法与当前一些主流的跟踪算法在CVPR 2013 Benchmark进行对比实验。仿真实验结果表明,本文算法的精准率和成功率分别为0.810和0.701,均优于其他算法,充分体现出了本文提出算法的鲁棒性。Abstract: Aiming at the problem of background information filtering too smooth when implementing equivalent weight training to context sample in context-aware correlation filter tracking algorithm, we propose an adaptive context-aware correlation filtering algorithm. And in order to solve the problem of target occlusion, we introduce a new occlusion criterion. First of all, extract background samples from the four directions of the target to learn in the filter. The target motion state is estimated by Kalman Filters and the direction of the target is predicted. During the training of the filter, more weight is given to the background sample training in the direction of the target movement. Then, a new occlusion indicator Average Peak-to correlation Energy(APCE) is introduced when the model is updated. The target model is updated only when the response peaks and APCE values are in proportional higher than their respective historical averages. Finally, the proposed algorithm is compared with some mainstream tracking algorithms in CVPR 2013 Benchmark. Simulation results show that the accuracy rate and success rate of the proposed algorithm respectively are 0.810 and 0.701, which are superior to other algorithms. The results fully reflect the robustness of the proposed algorithm.
-
Key words:
- context-aware /
- object tracking /
- adaptive /
- Kalman Filters /
- APCE
-

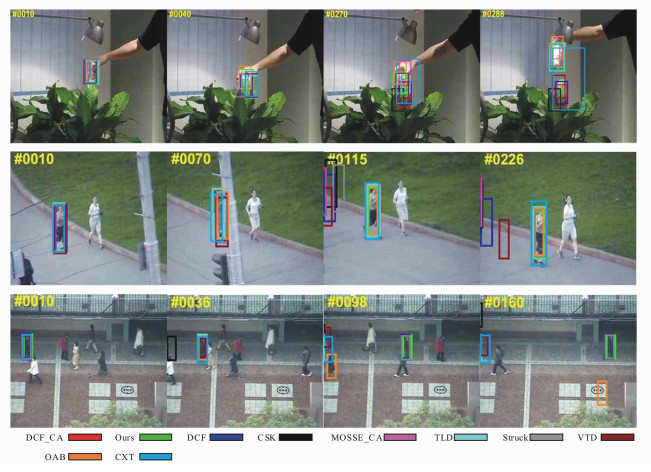
图 4 不同算法有遮挡情况的对比实验
Figure 4. Contrast experiment of different algorithms under occlusion
-
[1] 高文, 朱明, 贺柏根, 等.目标跟踪技术综述[J].中国光学, 2014, 7(3):365-375. http://www.chineseoptics.net.cn/CN/abstract/abstract9017.shtmlGAO W, ZHU M, HE B G, et al.. Overview of target tracking technology[J]. Chinese Optics, 2014, 7(3):365-375.(in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract9017.shtml [2] 郝志成, 高文.多模跟踪技术在轮式侦察车图像处理器的应用[J].中国光学, 2011, 4(5):480-488. doi: 10.3969/j.issn.2095-1531.2011.05.012HAO ZH CH, GAO W. Application of multi-pattern tracking technique in image processor of wheel type scout car[J]. Chinese Optics, 2011, 4(5):480-488.(in Chinese) doi: 10.3969/j.issn.2095-1531.2011.05.012 [3] 罗刚, 张云峰.应用角点匹配实现目标跟踪[J].中国光学与应用光学, 2009, 2(6):477-481. doi: 10.3969/j.issn.2095-1531.2009.06.002LUO G, ZHANG Y F. Target tracking using corner matching[J]. Chinese Journal of Optics and Applied Optics, 2009, 2(6):477-481. (in Chinese) doi: 10.3969/j.issn.2095-1531.2009.06.002 [4] 郭巳秋, 许廷发, 王洪庆, 等.改进的粒子群优化目标跟踪方法[J].中国光学, 2014, 7(5):759-767. http://www.chineseoptics.net.cn/CN/abstract/abstract9194.shtmlGUO S Q, XU T F, WANG H Q, et al.. Object tracking method based on improved particle swarm optimization[J]. Chinese Optics, 2014, 7(5):759-767.(in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract9194.shtml [5] 闫辉, 许廷发, 吴青青, 等.多特征融合匹配的多目标跟踪[J].中国光学, 2013, 6(2):163-170. http://www.chineseoptics.net.cn/CN/abstract/abstract8903.shtmlYAN H, XU T F, WU Q Q, et al.. Multi-object tracking based on multi-feature joint matching[J]. Chinese Optics, 2013, 6(2):163-170.(in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract8903.shtml [6] BOLME D S, BEVERIDGE J R, DRAPER B A, et al. . Visual object tracking using adaptive correlation filters[C]. Proceedings of 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, IEEE, 2010: 2544-2550. [7] HENRIQUES J F, CASEIRO R, MARTINS P, et al. . Exploiting the circulant structure of Tracking-by-detection with kernels[C]. Proceedings of the 12th European Conference on Computer Vision, Springer-Verlag, 2012: 702-715. [8] DANELLJAN M, KHAN F S, FELSBERG M, et al. . Adaptive color attributes for real-time visual tracking[C]. Proceedings of 2014 IEEE Conference on Computer Vision and Pattern Recognition, IEEE, 2014: 1090-1097. [9] HENRIQUES J F, CASEIRO R, MARTINS P, et al.. High-speed tracking with kernelized correlation filters[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(3):583-596. doi: 10.1109/TPAMI.2014.2345390 [10] GALOOGAHI H K, FAGG A, LUCEY S. Learning background-aware correlation filters for visual tracking[C]. Proceedings of 2017 IEEE International Conference on Computer Vision, IEEE, 2017: 1144-1152. [11] MUELLER M, SMITH N, GHANEM B. Context-aware correlation filter tracking[C]. Proceedings of 2017 IEEE Conference on Computer Vision and Pattern Recognition, IEEE, 2017: 1387-1395. [12] LI Y, ZHU J K. A scale adaptive kernel correlation filter tracker with feature integration[C]. European Conference on Computer Vision, Springer International Publishing, 2014, 8926: 254-265. [13] BERTINETTO L, VALMADRE J, GOLODETZ S, et al.. Staple:complementary learners for real-time tracking[J]. Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition(CVPR), IEEE, 2016:1401-1409. http://d.old.wanfangdata.com.cn/Periodical/gjny201503002 [14] WANG W M, LIU Y, HUANG Z Y. Large margin object tracking with circulant feature maps[C]. Proceedings of 2017 IEEE Conference on Computer Vision and Pattern Recognition, IEEE, 2017: 4800-4808. [15] WU Y, LIM J, YANG M H. Online object tracking: A benchmark[C]. Proceedings of 2013 IEEE Conference on Computer Vision and Pattern Recognition, IEEE, 2013: 2411-2418. [16] HARE S, GOLODETZ S, SAFFARI A, et al.. Struck:Structured output tracking with kernels[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2016, 38(10):2096-2109. doi: 10.1109/TPAMI.2015.2509974 [17] KALAL Z, MIKOLAJCZYK K, MATAS J. Tracking-learning-detection[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2012, 34(7):1409-1422. doi: 10.1109/TPAMI.2011.239 [18] KWON J, LEE K M. Visual tracking decomposition[C]. Proceedings of 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, IEEE, 2010: 1269-1276. [19] DINH T B, VO N, MEDIONI G. Context tracker: exploring supporters and distracters in unconstrained environments[C]. Computer Vision and Pattern Recognition, IEEE, 2011: 1177-1184. [20] GRABNER H, GRABNER M, BISCHOF H. Real-time tracking via on-line boosting[C]. British Machine Vision Conference, BMVA Press, 2006: 47-56. [21] DANELLJAN M, H GER G, KHAN F, et al. . Accurate scale estimation for robust visual tracking[C]. British Machine Vision Conference, BMVA Press, 2014: 471-482. -

 下载:
下载:

 点击查看大图
点击查看大图

图(5)
计量
- 文章访问数: 2324
- HTML全文浏览量: 1021
- PDF下载量: 243
- 被引次数: 0
