| Citation: | REN Ming-yang, WANG Li-zhong, ZHAO Jian-bo, TANG Zheng-zong. Viewpoint planning of surface structured light scanning for complex surface parts[J]. Chinese Optics, 2023, 16(1): 113-126. doi: 10.37188/CO.2022-0026

|
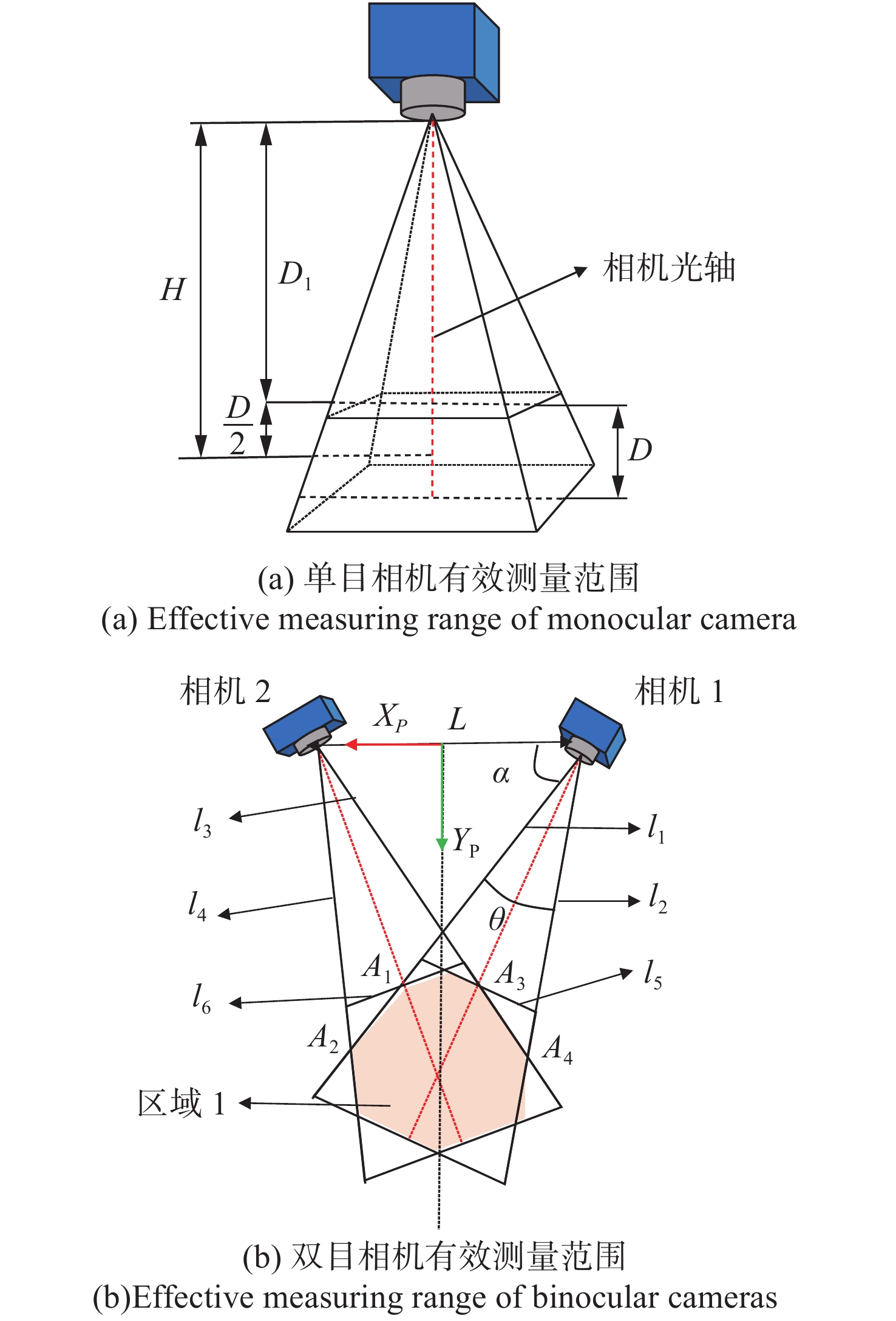
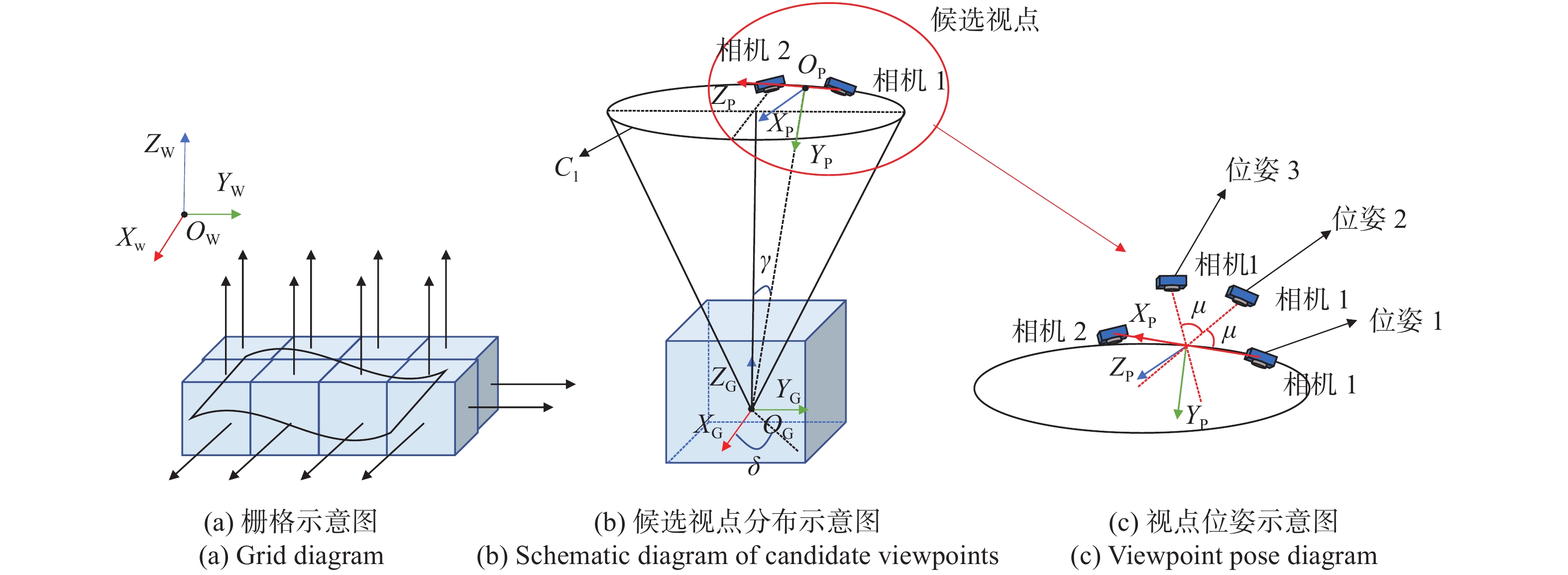
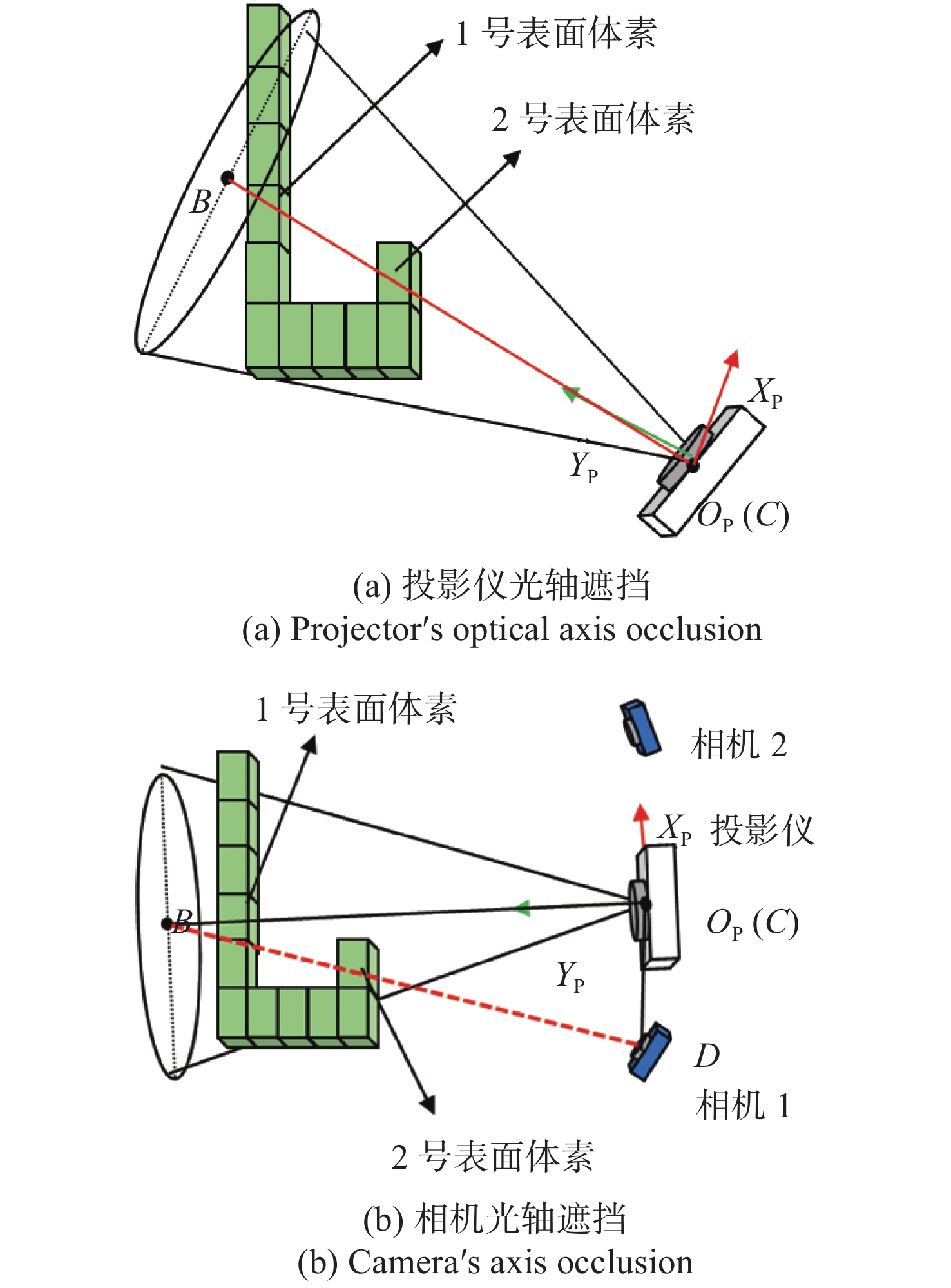
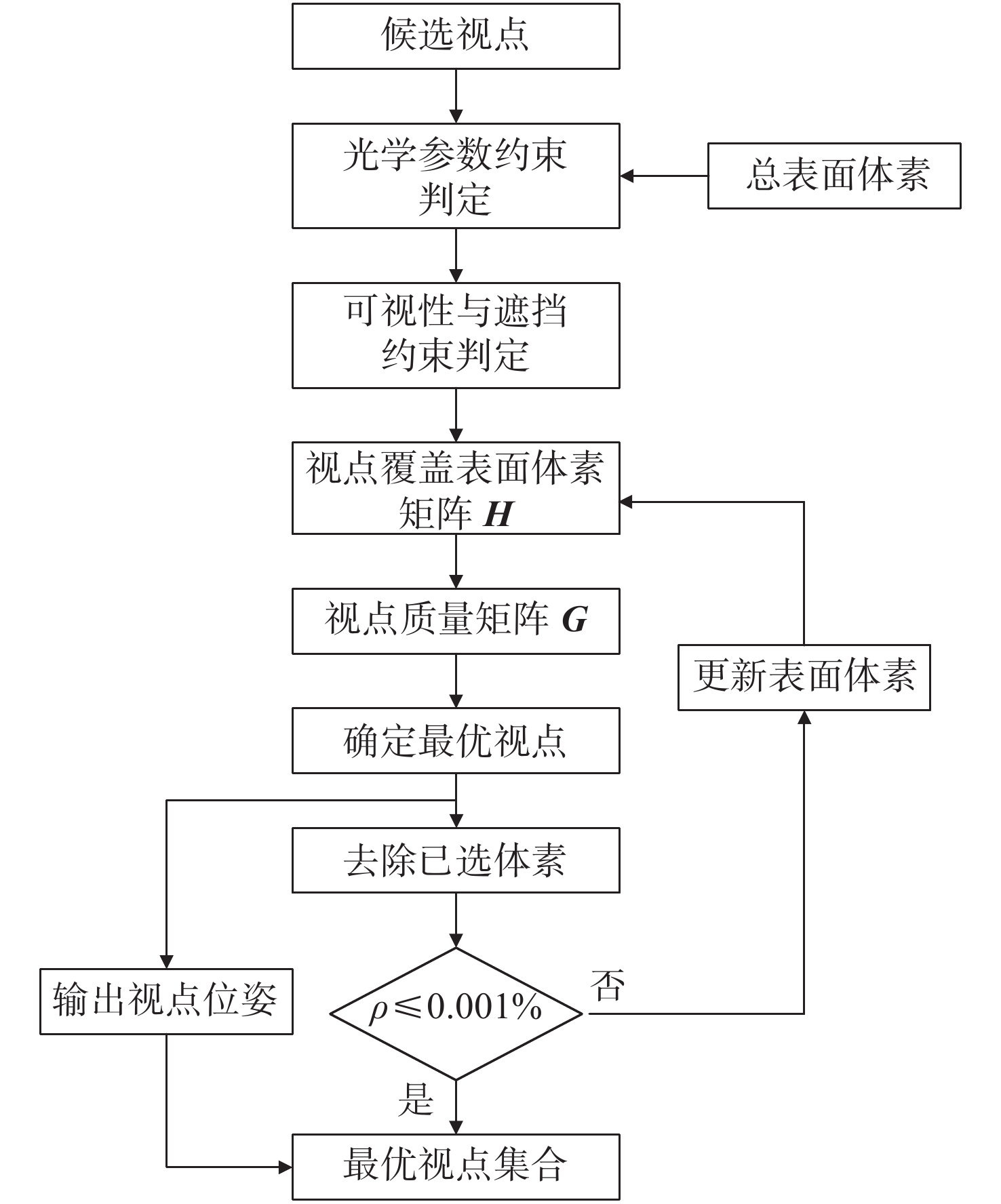
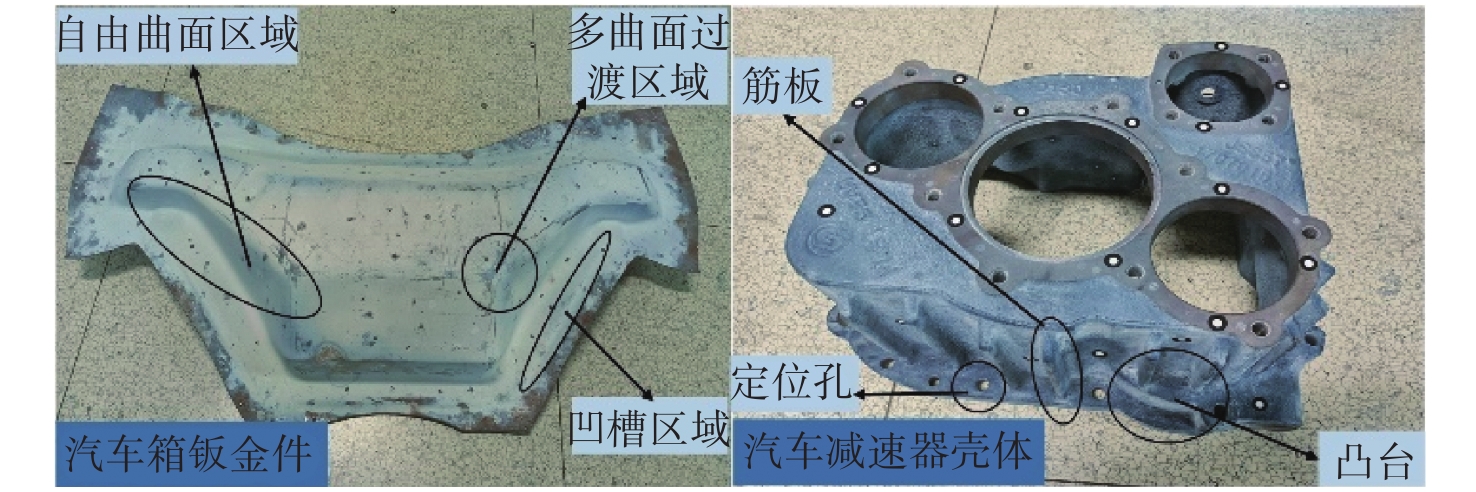
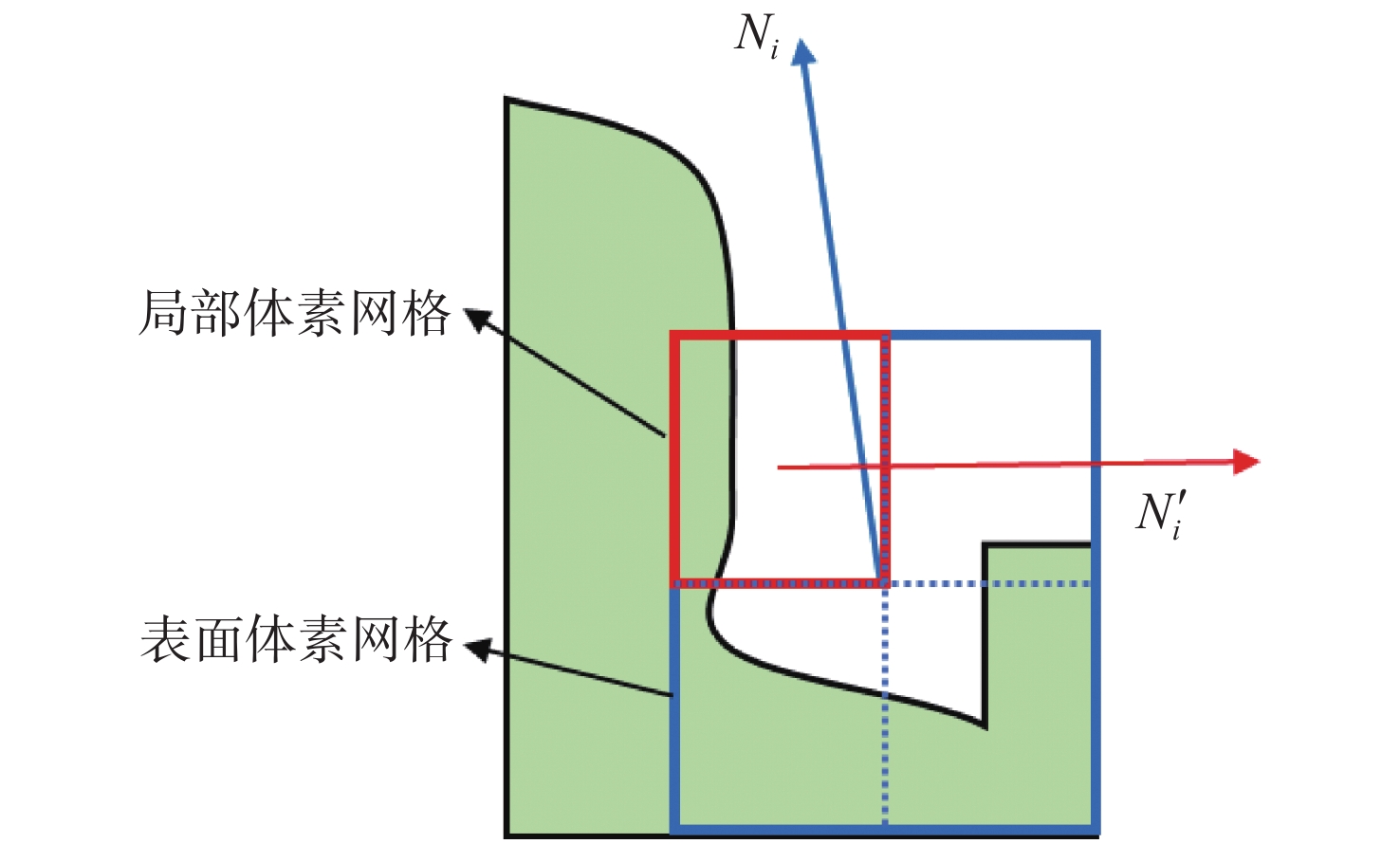
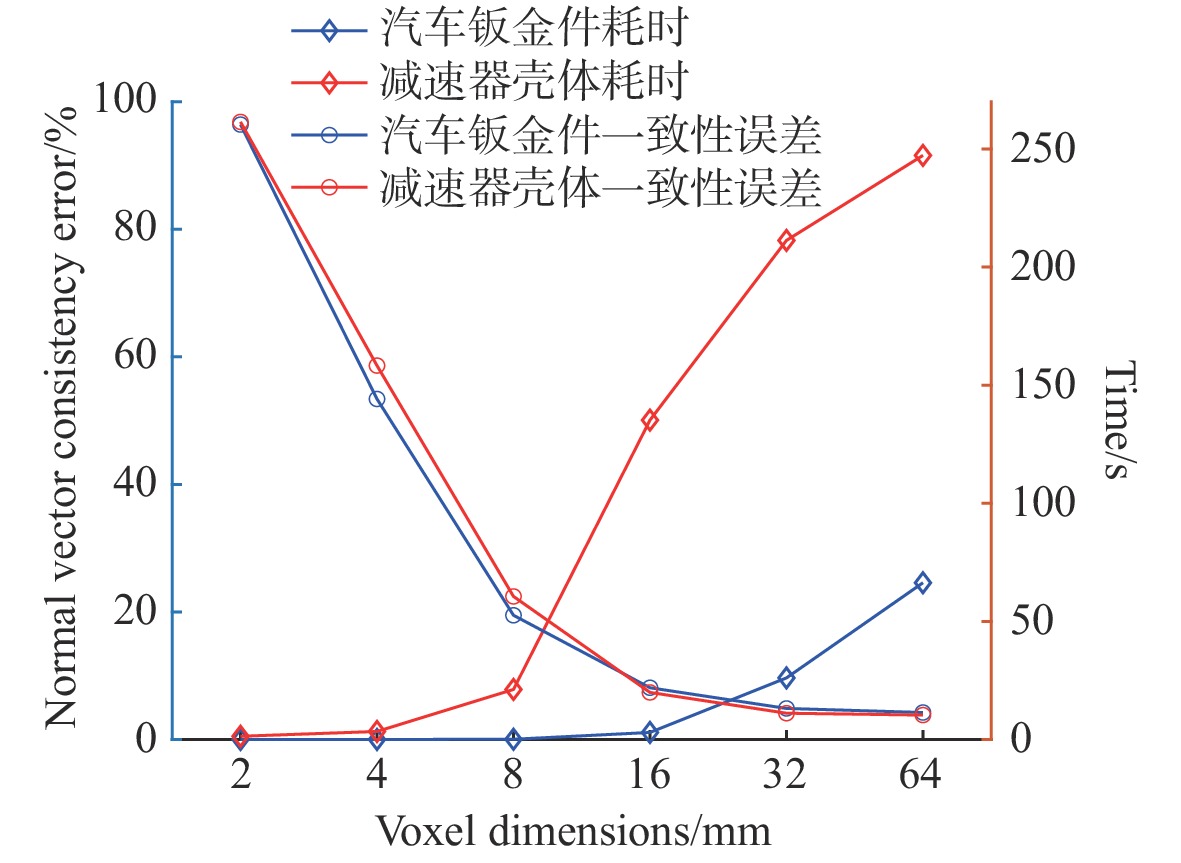
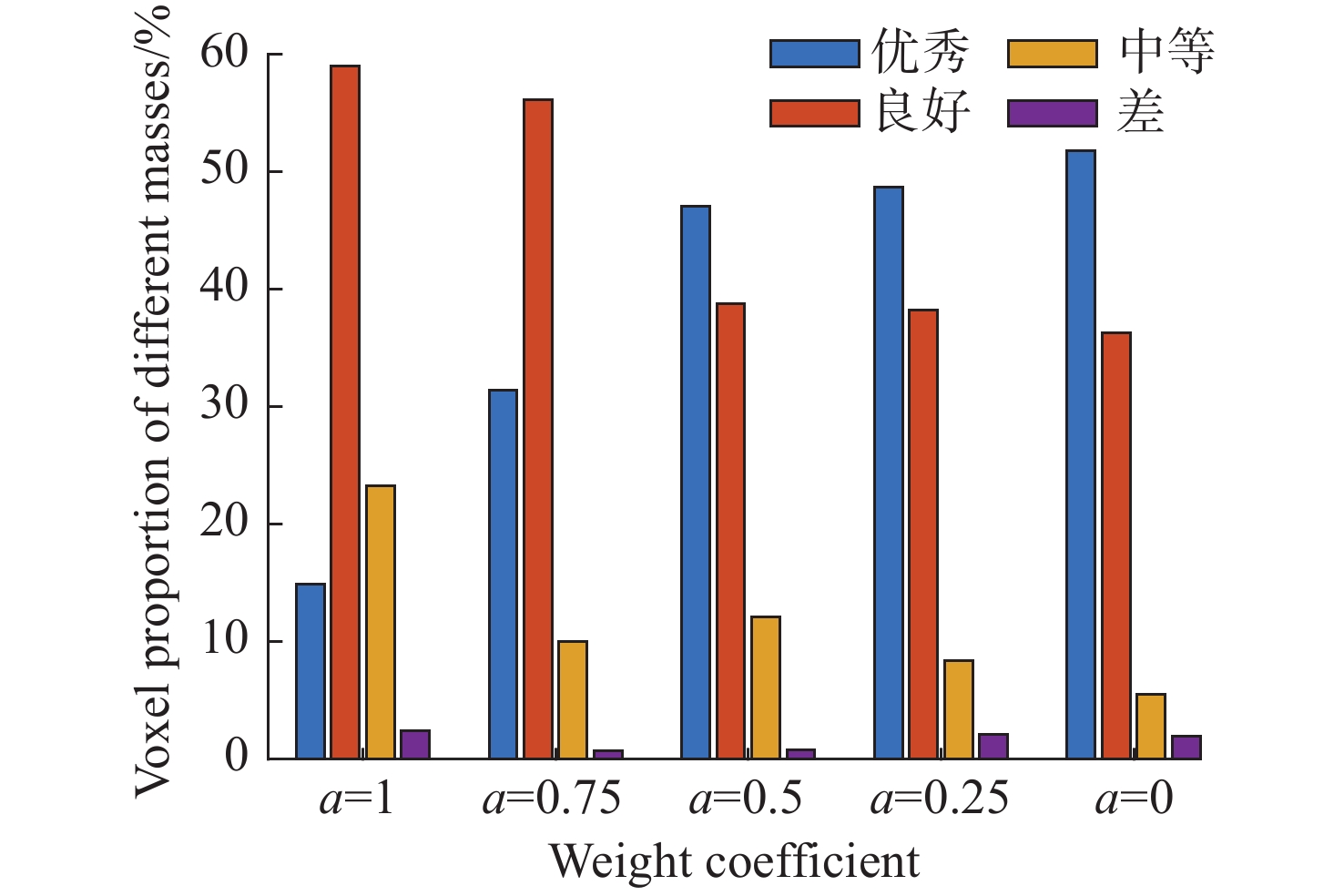
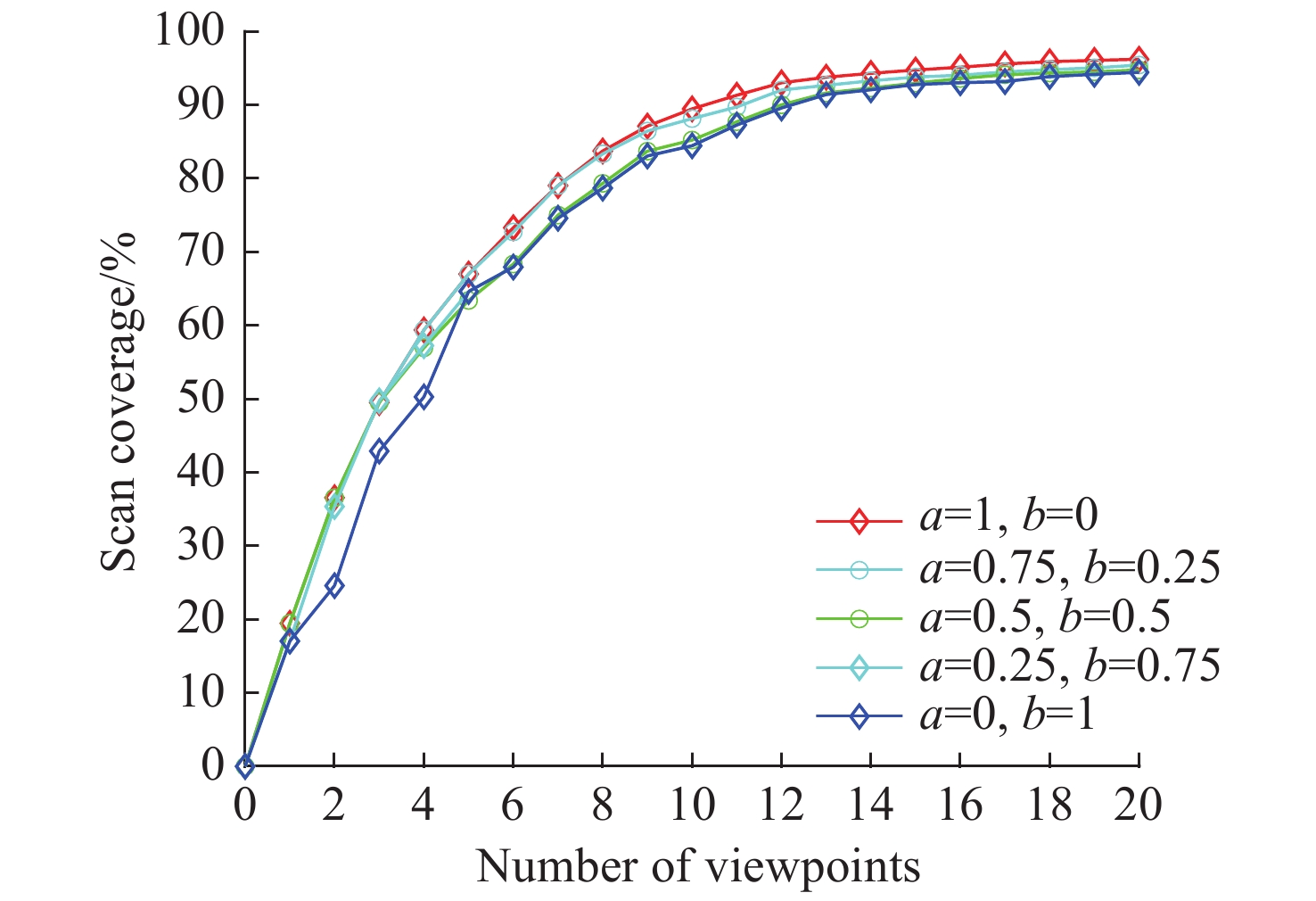
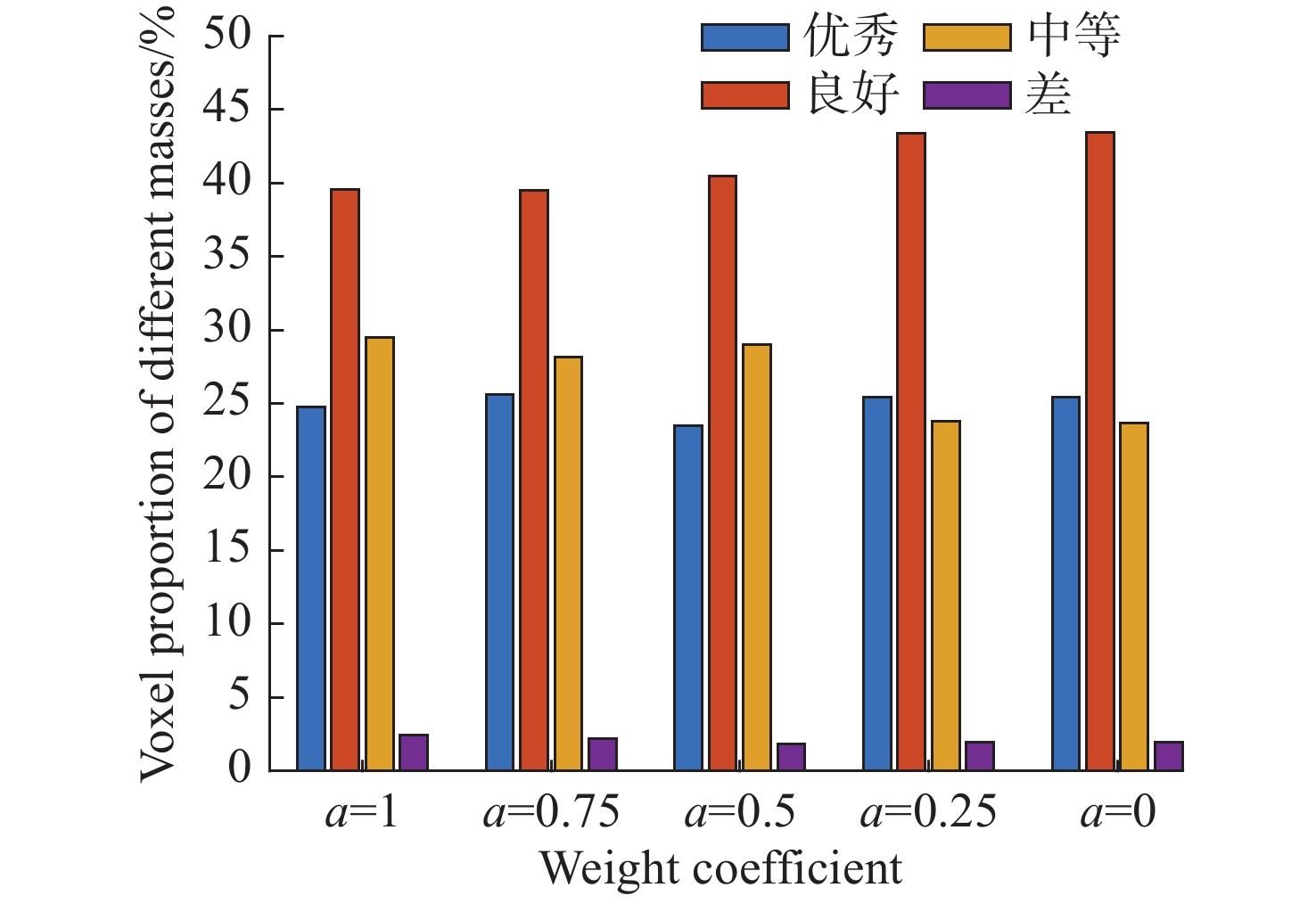
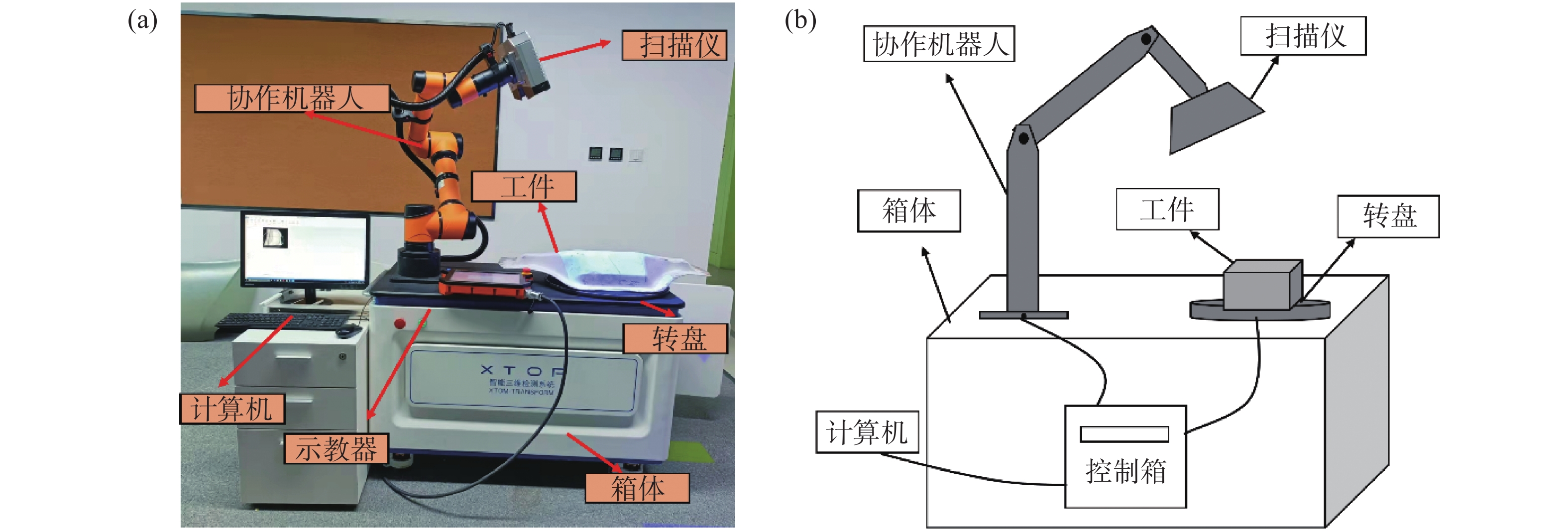
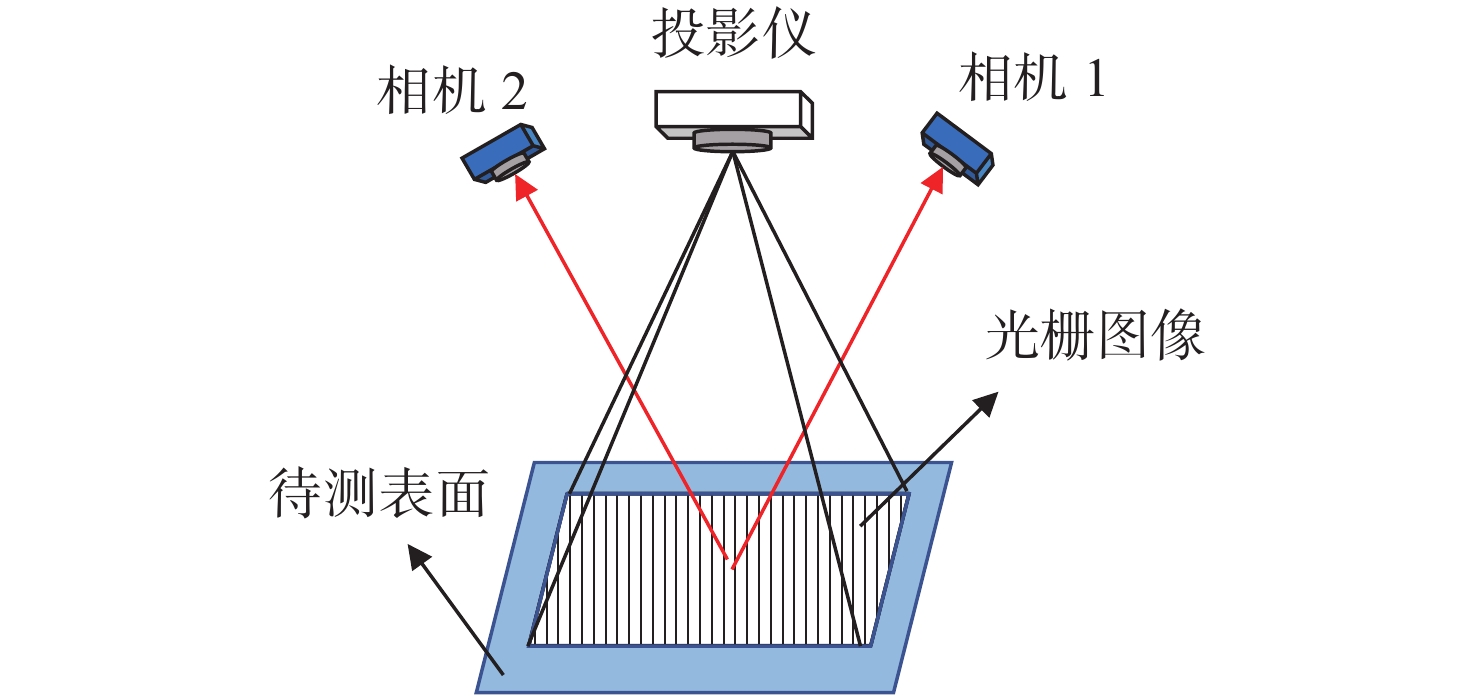
In order to realize the efficient and automatic measurement of complex curved surface parts, we propose a viewpoint planning method of surface structured light scanning based on an improved grid method, and apply it to the automatic measurement of automobile parts with complex curved surface. Firstly, aiming at the problem of serious redundancy and poor scanning integrity of the manual teaching viewpoint, a scanning viewpoint planning algorithm for surface structured light based on an improved grid method is proposed. According to the effective measurement range of a surface structured light scanner, the grid size is determined, and the candidate viewpoint generation strategy is improved. The effective measurement range of candidate viewpoints is obtained by the measurement constraint condition of the scanner, and the optimal viewpoint is determined by the viewpoint quality evaluation function. Secondly, in view of the low efficiency of the algorithm and the low accuracy of feature reconstruction in the process of viewpoint planning, the voxel grid method is used to simplify the model. The complex surface model is segmented by the octree algorithm, and the voxel grid size is determined according to the normal vector consistency error. For the models with different geometric characteristics, the influence of the weight coefficient on the scanning quality is analyzed, and the optimal weight coefficient is given. Finally, the scanning viewpoint planning and measurement experiments of automobile sheet metal parts and reducer shell are carried out. The results show that the viewpoint planning of the automobile sheet metal parts takes 21.93 s, the scanning integrity is 99.124%, and the scanning accuracy is 0.025 mm. The viewpoint planning of automobile reducer shell takes 158.29 s, its scanning integrity is 93.231%, and its scanning accuracy is 0.032 mm. This method can quickly complete the viewpoint planning of complex curved surfaces, and the model obtained by planning viewpoint scanning has good integrity and high precision, which can meet the requirements of complex curved surface parts for automatic measurement.

| [1] |
洪华杰, 甘子豪, 何科延, 等. 用于曲面轮廓测量的结构光视觉技术研究[J]. 自动化仪表,2021,42(7):1-5.
HONG H J, GAN Z H, HE K Y, et al. Research on structured light vision technology for surface contour measurement[J]. Process Automation Instrumentation, 2021, 42(7): 1-5. (in Chinese)
|
| [2] |
王永红, 张倩, 胡寅, 等. 显微条纹投影小视场三维表面成像技术综述[J]. 中国光学,2021,14(3):447-457. doi: 10.37188/CO.2020-0199
WANG Y H, ZHANG Q, HU Y, et al. 3D small-field surface imaging based on microscopic fringe projection profilometry: a review[J]. Chinese Optics, 2021, 14(3): 447-457. (in Chinese) doi: 10.37188/CO.2020-0199
|
| [3] |
杜明鑫, 闫钰锋, 张燃, 等. 基于透镜阵列的三维姿态角度测量[J]. 中国光学,2022,15(1):45-55. doi: 10.37188/CO.2021-0129
DU M X, YAN Y F, ZHANG R, et al. 3D position angle measurement based on a lens array[J]. Chinese Optics, 2022, 15(1): 45-55. (in Chinese) doi: 10.37188/CO.2021-0129
|
| [4] |
陈仁虹, 梁晋, 叶美图, 等. 柔性复合薄膜成形极限曲线的视觉测定方法[J]. 中国光学,2022,15(1):22-33. doi: 10.37188/CO.2021-0101
CHEN R H, LIANG J, YE M T, et al. Visual method for measuring forming limit curve of pliable composite film[J]. Chinese Optics, 2022, 15(1): 22-33. (in Chinese) doi: 10.37188/CO.2021-0101
|
| [5] |
GERBINO S, DEL GIUDICE D M, STAIANO G, et al. On the influence of scanning factors on the laser scanner-based 3D inspection process[J]. The International Journal of Advanced Manufacturing Technology, 2016, 84(9): 1787-1799.
|
| [6] |
PHAN N D M, QUINSAT Y, LAVERNHE S, et al. Scanner path planning with the control of overlap for part inspection with an industrial robot[J]. The International Journal of Advanced Manufacturing Technology, 2018, 98(1): 629-643.
|
| [7] |
廖一帆. 基于视点规划的自动三维重建关键技术研究[D]. 深圳: 深圳大学, 2019: 22-25.
LIAO Y F. Research on key techniques of automatic 3D reconstruction based on viewpoint planning[D]. Shenzhen: Shenzhen University, 2019: 22-25. (in Chinese)
|
| [8] |
郭一佟. 三维面扫描测量机器人路径规划研究与实现[D]. 合肥: 合肥工业大学, 2020: 34-41.
GUO Y T. Research and implementation of path planning algorithm for robotic 3D areal scanners[D]. Hefei: Hefei University of Technology, 2020: 34-41. (in Chinese)
|
| [9] |
LEE I D, SEO J H, KIM Y M, et al. Automatic pose generation for robotic 3-D scanning of mechanical parts[J]. IEEE Transactions on Robotics, 2020, 36(4): 1219-1238. doi: 10.1109/TRO.2020.2980161
|
| [10] |
MARTINS F A R, GARCÍA-BERMEJO J G, CASANOVA E Z, et al. Automated 3D surface scanning based on CAD model[J]. Mechatronics, 2005, 15(7): 837-857. doi: 10.1016/j.mechatronics.2005.01.004
|
| [11] |
LARTIGUE C, QUINSAT Y, MEHDI-SOUZANI C, et al. Voxel-based path planning for 3D scanning of mechanical parts[J]. Computer-Aided Design and Applications, 2014, 11(2): 220-227. doi: 10.1080/16864360.2014.846096
|
| [12] |
韩沛文. 面结构光自动化三维测量中视点生成与路径规划关键技术研究[D]. 武汉: 华中科技大学, 2018: 19-24.
HAN P W. Research on key technique of viewpoint generation and path planning for automated surface structured-light 3D measurement[D]. Wuhan: Huazhong University of Science and Technology, 2018: 19-24. (in Chinese)
|
| [13] |
李中伟, 张攀, 钟凯, 等. AutoScan系列复杂零件自动化三维测量装备开发与应用[J]. 航空学报,2021,42(10):112-129.
LI ZH W, ZHANG P, ZHONG K, et al. Development and application of AutoScan series automated 3D measuring equipment for complex parts[J]. Acta Aeronauticaet Astronautica Sinica, 2021, 42(10): 112-129. (in Chinese)
|
Figures(21) / Tables(1)



 DownLoad:
DownLoad: