| Citation: | WANG Yan, XU Hao-yu, WANG Jun-liang, ZHU Wei, JIANG Chao. Three-dimensional surface shape reconstruction of fiber bragg gratings in a ring arrangement[J]. Chinese Optics, 2024, 17(2): 398-408. doi: 10.37188/CO.2023-0088

|
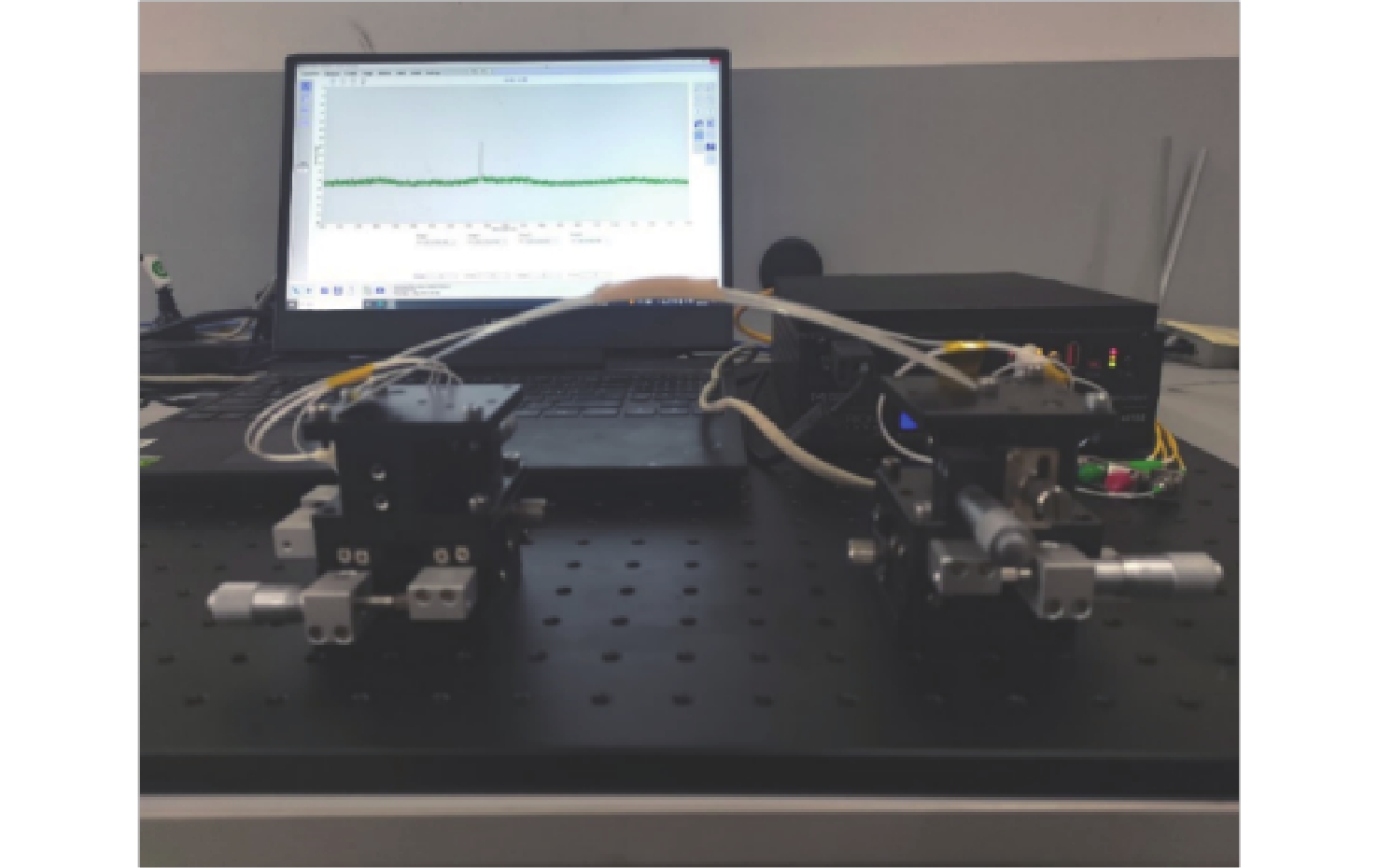
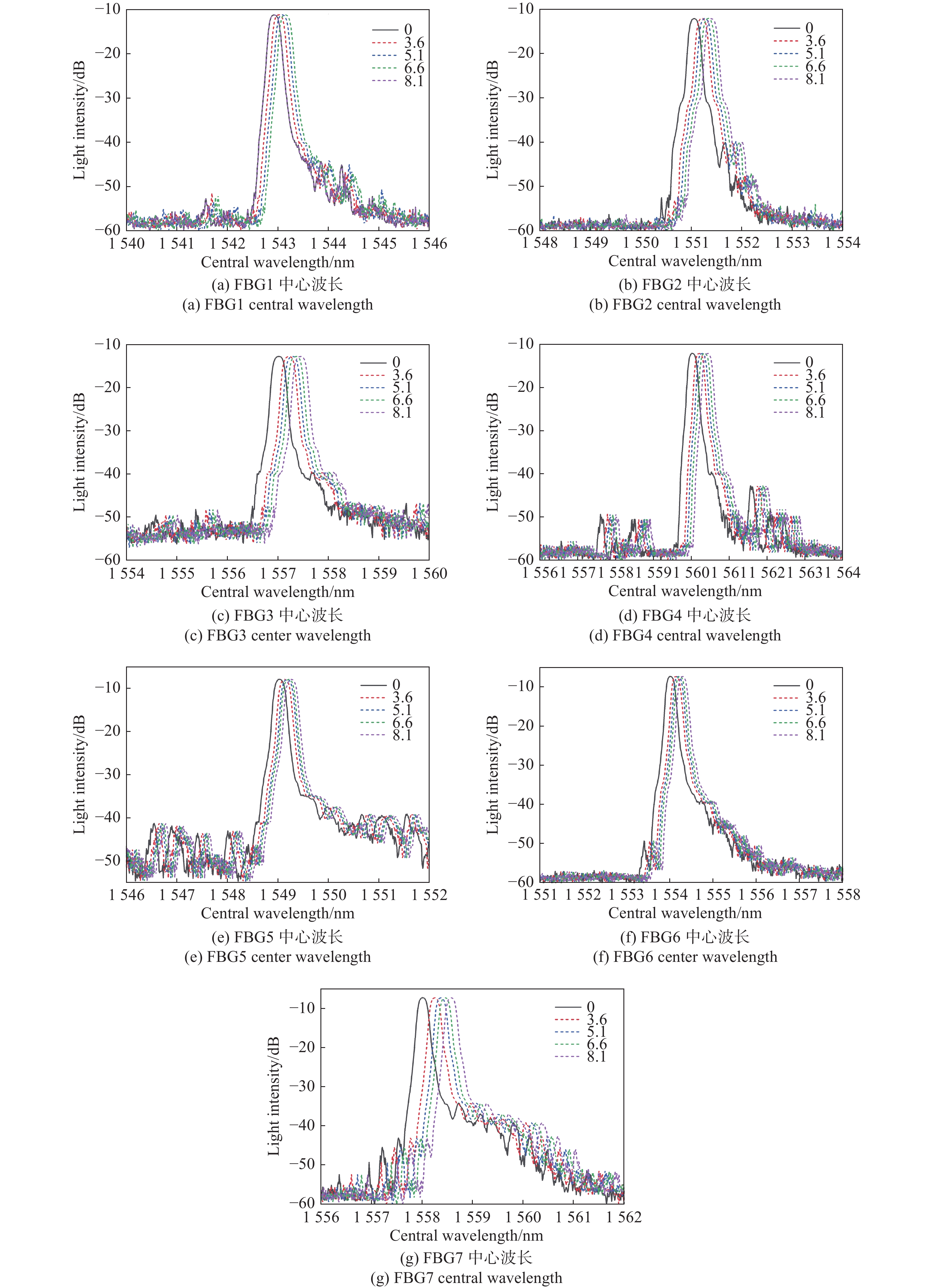
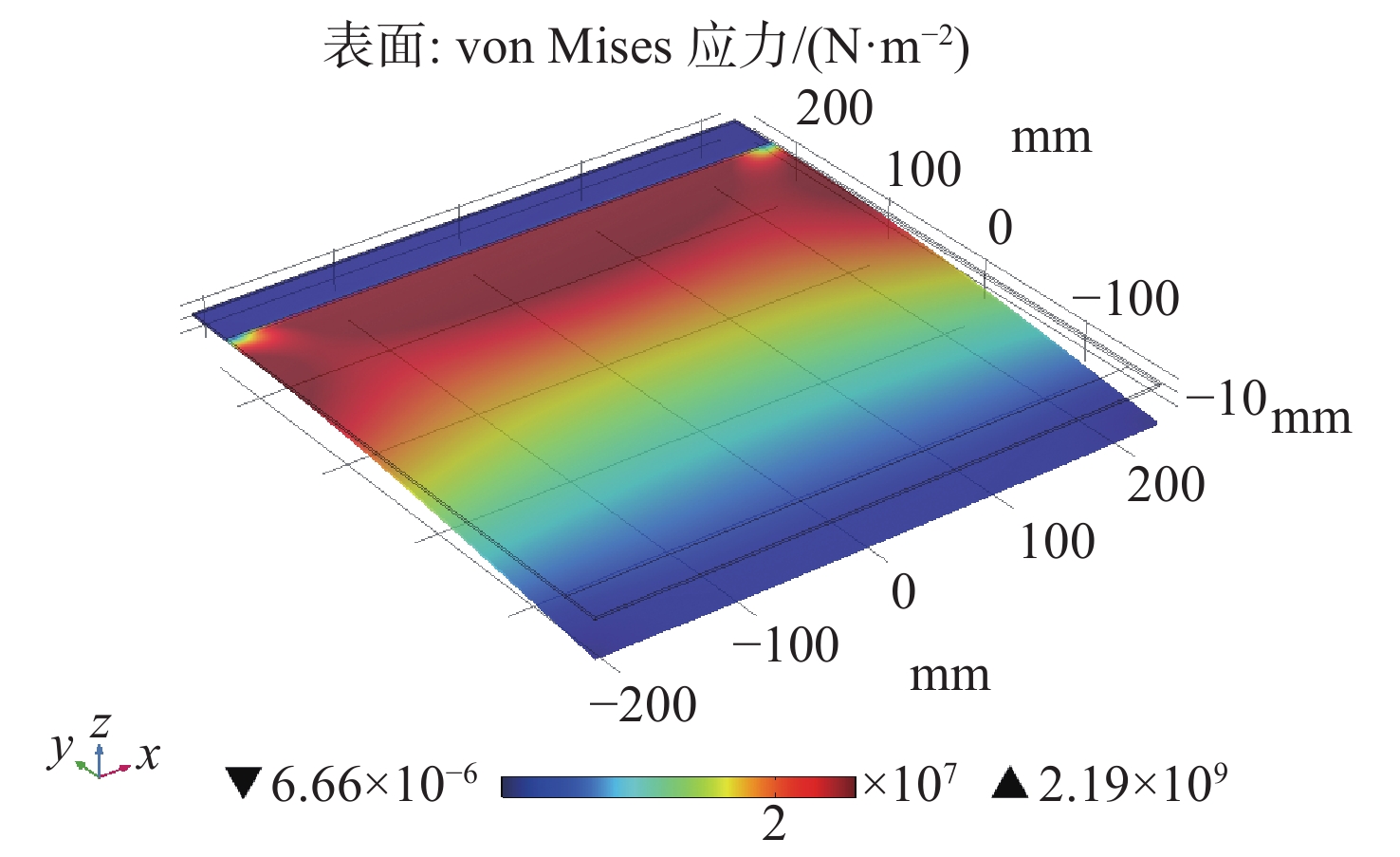
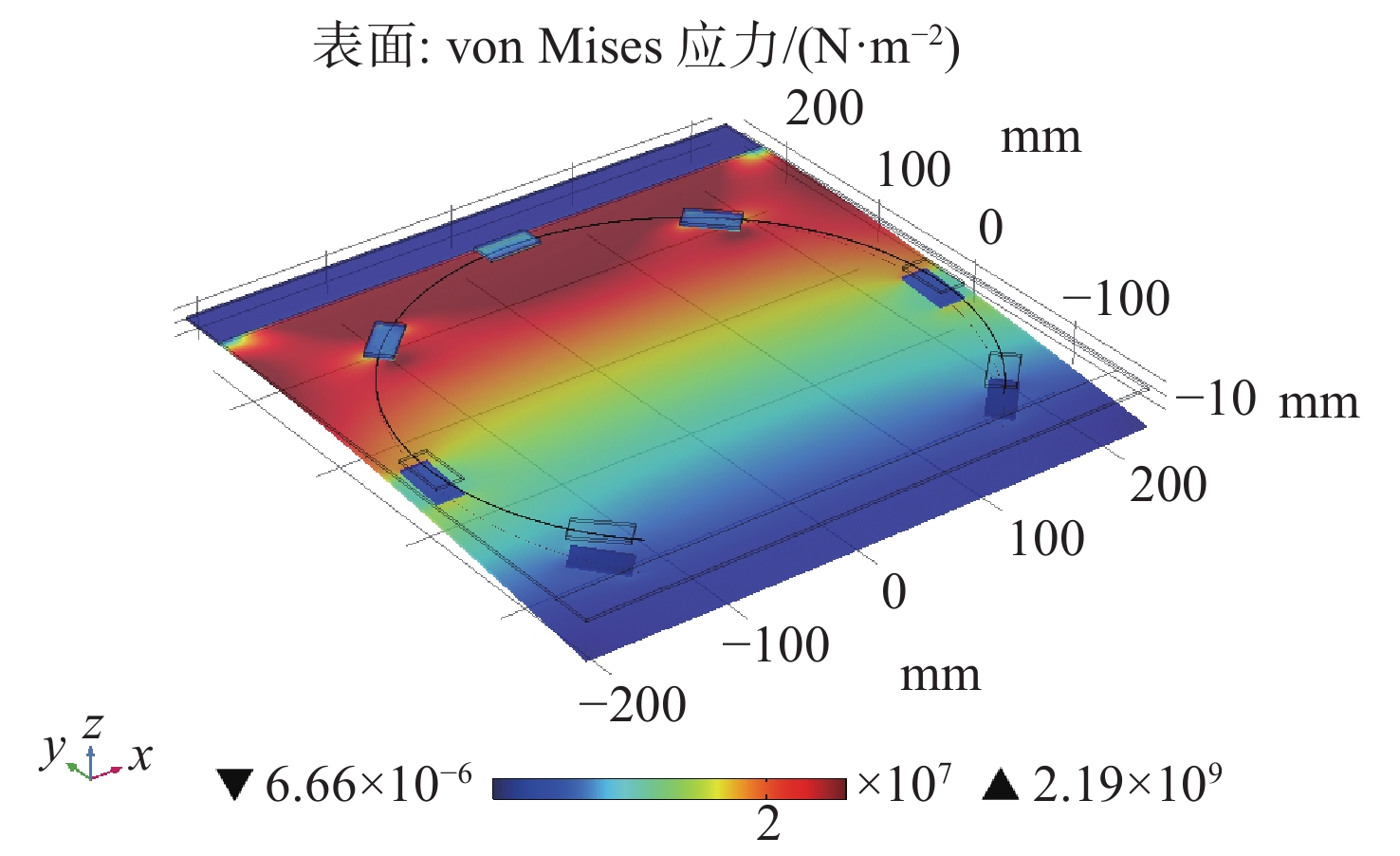
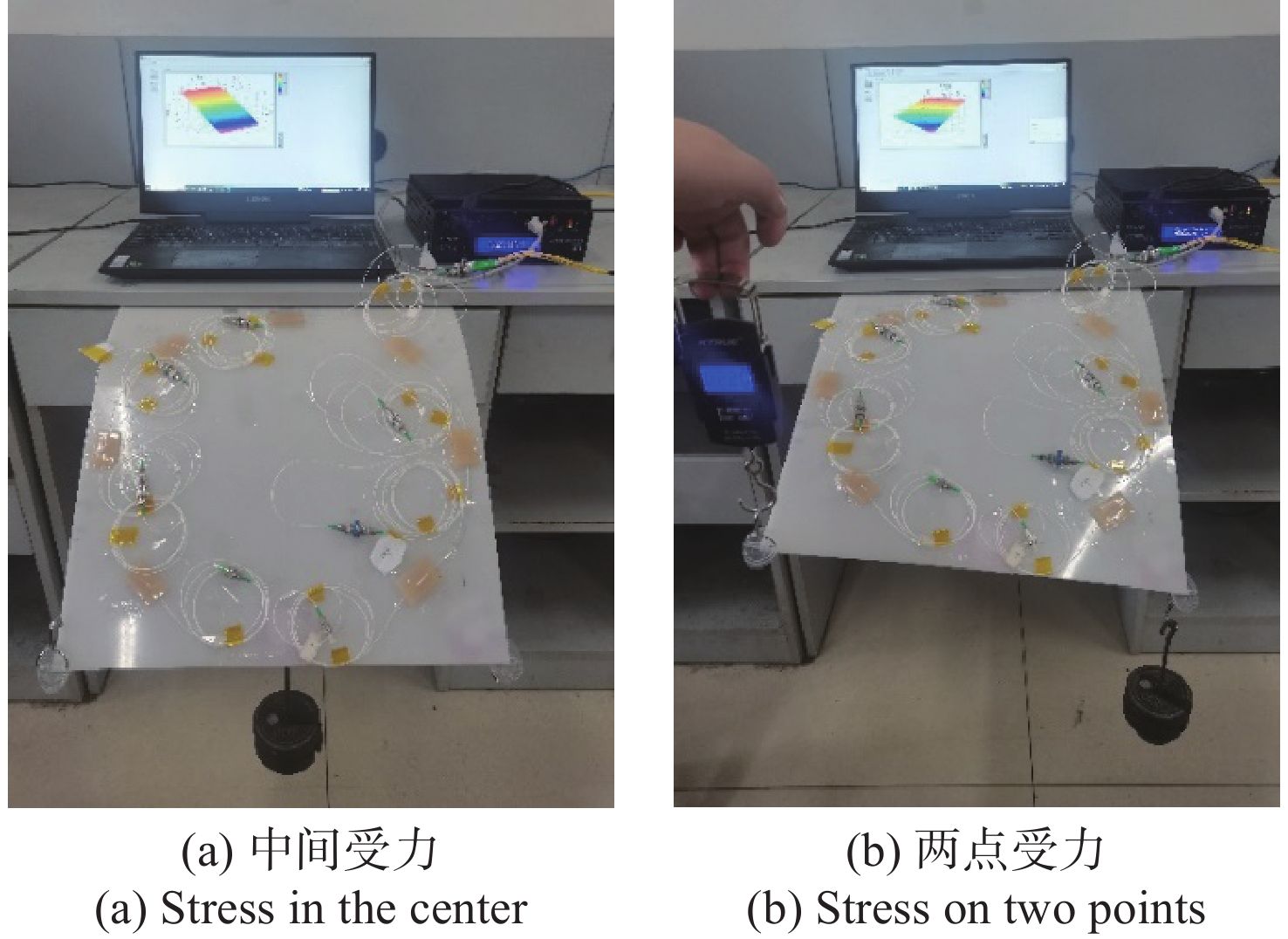
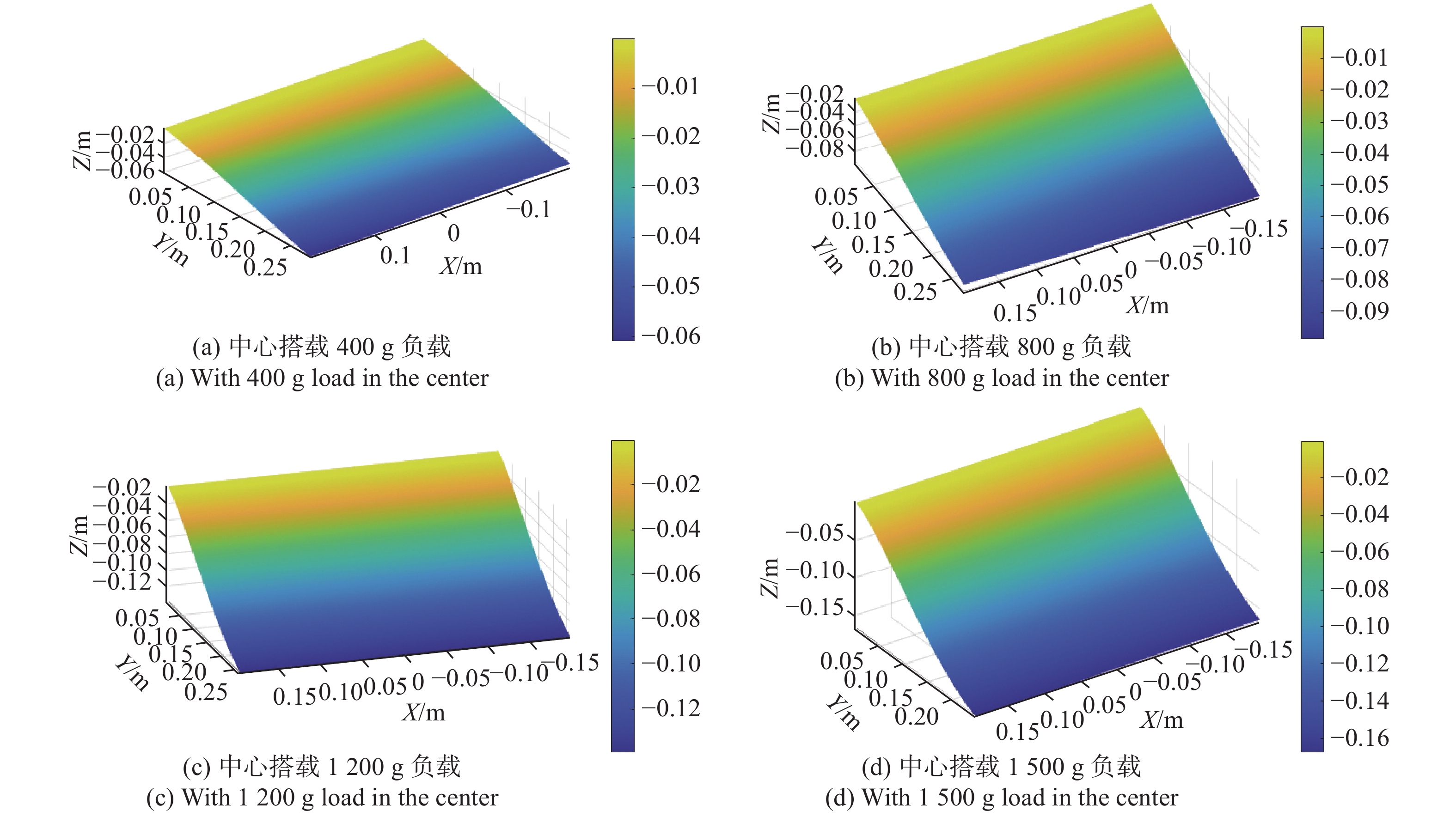
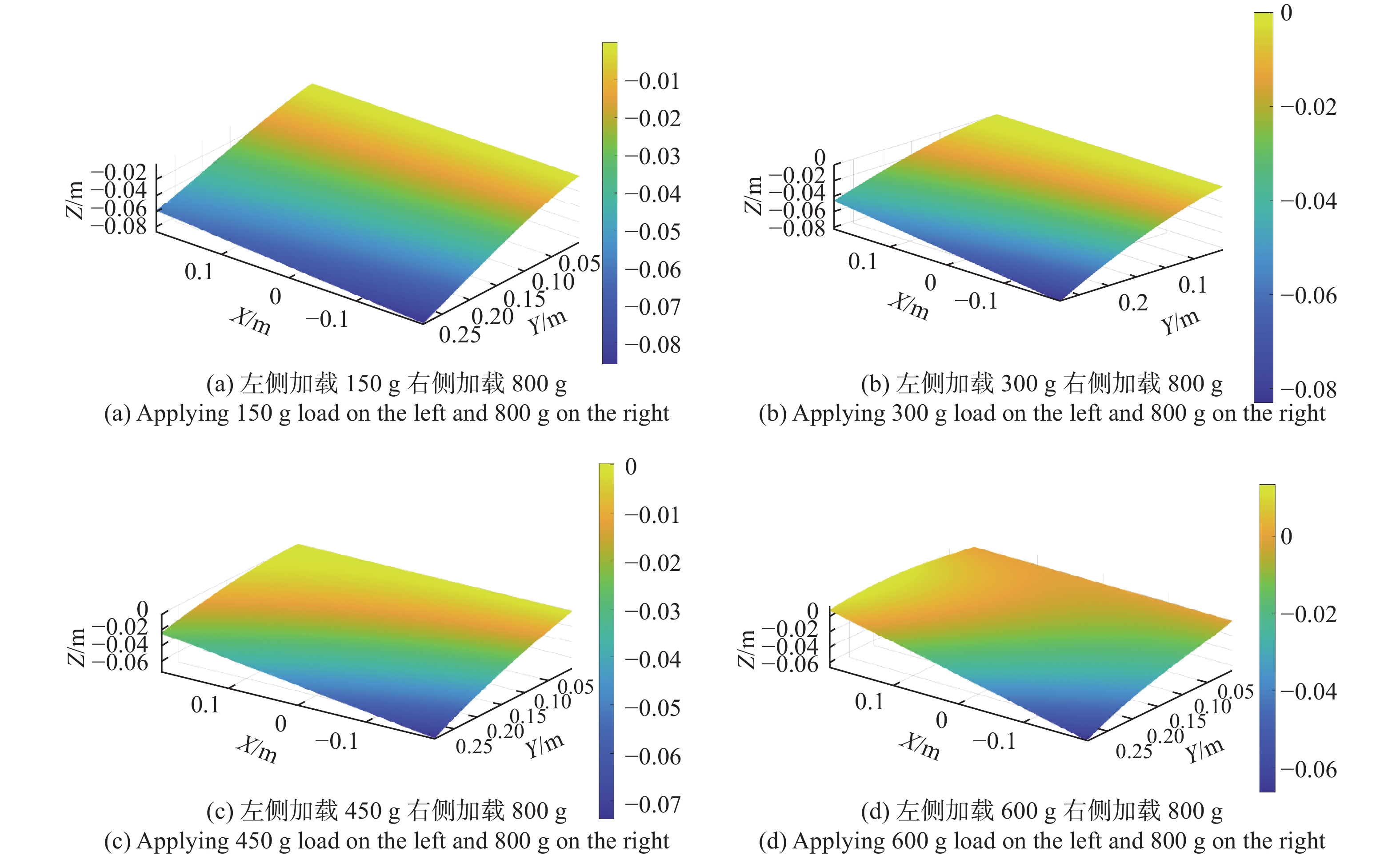
To improve the accuracy of palm surface reconstruction in flexible robot grasp sensing, we conduct a COMSOL simulation to select a ring arrangement comprising of 7 fiber Bragg grating (FBG) flexible sensors packaged with polydimethylsiloxane (PDMS) on a 436 mm×436 mm×2 mm polypropylene plate. Assuming that the center and two corner ends of the plate were subjected to stress, respectively, we collected sensor data using a fiber grating demodulation instrument during the experiment. The data was continuously interpolated using cubic spline interpolation. Several planes

| [1] |
陈小丽, 张波, 李杰, 等. 非接触电感式角位移传感器的设计与校准[J]. 仪器仪表学报,2022,43(2):36-42. doi: 10.19650/j.cnki.cjsi.J2108556
CHEN X L, ZHANG B, LI J, et al. Design and calibration of the non-contact inductive angular displacement sensor[J]. Chinese Journal of Scientific Instrument, 2022, 43(2): 36-42. (in Chinese). doi: 10.19650/j.cnki.cjsi.J2108556
|
| [2] |
RIZA M A, GO Y I, HARUN S W, et al. FBG sensors for environmental and biochemical applications-a review[J]. IEEE Sensors Journal, 2020, 20(14): 7614-7627. doi: 10.1109/JSEN.2020.2982446
|
| [3] |
曲道明, 孙广开, 李红, 等. 变形机翼柔性蒙皮形状光纤传感及重构方法[J]. 仪器仪表学报,2018,39(1):144-151. doi: 10.19650/j.cnki.cjsi.j1702537
QU D M, SUN G K, LI H, et al. Optical fiber sensing and reconstruction method for morphing wing flexible skin shape[J]. Chinese Journal of Scientific Instrument, 2018, 39(1): 144-151. (in Chinese). doi: 10.19650/j.cnki.cjsi.j1702537
|
| [4] |
郭永兴, 张航, 熊丽, 等. 基于光纤布拉格光栅的扑翼机器人三维扑动变形测量[J]. 光学 精密工程,2023,31(9):1304-1313. doi: 10.37188/OPE.20233109.1304
GUO Y X, ZHANG H, XIONG L, et al. Fiber Bragg grating based 3D flutter deformation measurement of flapping wing robot[J]. Optics and Precision Engineering, 2023, 31(9): 1304-1313. (in Chinese). doi: 10.37188/OPE.20233109.1304
|
| [5] |
王文娟, 薛景锋, 张梦杰, 等. 基于光纤传感的结构变形实时监测技术研究[J]. 航空科学技术,2022,33(12):97-104. doi: 10.19452/j.issn1007-5453.2022.12.011
WANG W J, XUE J F, ZHANG M J, et al. Research on real-time monitoring technology of structural deformation based on optical fiber sensing[J]. Aeronautical Science & Technology, 2022, 33(12): 97-104. (in Chinese). doi: 10.19452/j.issn1007-5453.2022.12.011
|
| [6] |
郭永兴, 杨跃辉, 熊丽. 双层正交的光纤布拉格光栅柔性形状传感技术[J]. 光学 精密工程,2021,29(10):2306-2315. doi: 10.37188/OPE.20212910.2306
GUO Y X, YANG Y H, XIONG L. Double-layer orthogonal fiber Bragg gratings flexible shape sensing technology[J]. Optics and Precision Engineering, 2021, 29(10): 2306-2315. (in Chinese). doi: 10.37188/OPE.20212910.2306
|
| [7] |
王永祥, 徐东华, 李春香, 等. 基于准分布式FBG传感网络的挖泥船耙管形状重构试验[J]. 船舶工程,2021,43(11):17-21,83. doi: 10.13788/j.cnki.cbgc.2021.11.04
WANG Y X, XU D H, LI CH X, et al. Experiment on shape reconstruction of Dredger's suction pipe based on quasi-distributed FBG sensor network[J]. Ship Engineering, 2021, 43(11): 17-21,83. (in Chinese). doi: 10.13788/j.cnki.cbgc.2021.11.04
|
| [8] |
赵利明, 董明利, 李红, 等. 仿生柔性触角形状感知光纤传感方法研究[J]. 激光与红外,2018,48(4):509-514.
ZHAO L M, DONG M L, LI H, et al. Research on shape sensing fiber optic sensing method of bionic flexible antenna[J]. Laser & Infrared, 2018, 48(4): 509-514. (in Chinese).
|
| [9] |
梁磊, 胡程辉, 戴澍, 等. 基于FBG传感技术的管道曲率监测试验研究[J]. 光电子·激光,2021,32(5):499-504. doi: 10.16136/j.joel.2021.05.0374
LIANG L, HU CH H, DAI SH, et al. Experimental research on pipeline curvature monitoring based on FBG sensing technology[J]. Journal of Optoelectronics·Laser, 2021, 32(5): 499-504. (in Chinese). doi: 10.16136/j.joel.2021.05.0374
|
| [10] |
安其昌, 吴小霞, 张景旭, 等. 大口径巡天望远镜分区域曲率传感方法研究[J]. 中国光学(中英文),2023,16(2):358-365. doi: 10.37188/CO.2022-0117
AN Q CH, WU X X, ZHANG J X, et al. Subregion curvature sensing method for survey telescope with larger aperture[J]. Chinese Optics, 2023, 16(2): 358-365. (in Chinese). doi: 10.37188/CO.2022-0117
|
| [11] |
谭明享, 张东生. 基于频域反射的分布式光纤传感变形重构研究[J]. 光通信技术,2021,45(12):17-20. doi: 10.13921/j.cnki.issn1002-5561.2021.12.005
TAN M X, ZHANG D SH. Research on deformation reconstruction of distributed optical fiber sensing based on frequency domain reflection[J]. Optical Communication Technology, 2021, 45(12): 17-20. (in Chinese). doi: 10.13921/j.cnki.issn1002-5561.2021.12.005
|
| [12] |
龙雨恒, 孙世政, 党晓圆. 一种十字型阵列的光纤光栅柔性力觉传感器[J]. 传感技术学报,2020,33(7):940-944. doi: 10.3969/j.issn.1004-1699.2020.07.003
LONG Y H, SUN SH ZH, DANG X Y. A flexible force sensor with fiber Bragg grating cruciform array[J]. Chinese Journal of Sensors and Actuators, 2020, 33(7): 940-944. (in Chinese). doi: 10.3969/j.issn.1004-1699.2020.07.003
|
| [13] |
朱晓锦, 季玲晓, 张合生, 等. 基于空间正交曲率信息的三维曲线重构方法分析[J]. 应用基础与工程科学学报,2011,19(2):305-313.
ZHU X J, JI X L, ZHANG H SH, et al. Analysis of 3D curve reconstruction method using orthogonal curvatures[J]. Journal of Basic Science and Engineering, 2011, 19(2): 305-313. (in Chinese).
|
| [14] |
张新荣, 王鑫, 王瑶, 等. 基于转动式二维激光扫描仪和多传感器的三维重建方法[J]. 中国光学(中英文),2023,16(3):663-672. doi: 10.37188/CO.2022-0159
ZHANG X R, WANG X, WANG Y, et al. 3D reconstruction method based on a rotating 2D laser scanner and multi-sensor[J]. Chinese Optics, 2023, 16(3): 663-672. (in Chinese). doi: 10.37188/CO.2022-0159
|
Figures(22) / Tables(1)



 DownLoad:
DownLoad: