


High dynamic range imaging technology using DMD
-
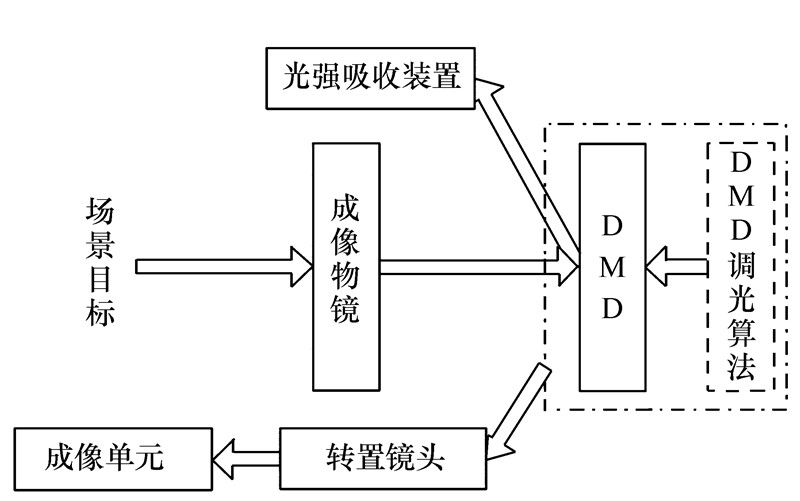
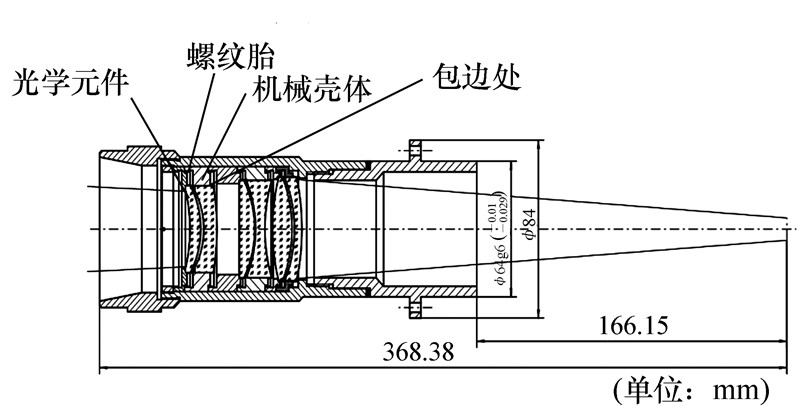
摘要: 高动态范围的图像可用于同时探测具有较大对比度的亮暗目标,利用数字微镜(DMD)获取高动态范围图像是目前最为先进的一种技术。本文在分析DMD工作原理的基础上,设计了一种像素级的高动态范围图像获取系统,该系统由光学系统、机械系统、DMD像素级调光算法及成像单元组成。光学系统采用二次成像光路,其中第一次成像物镜采用像方远心光路,第二次成像的转置镜头采用放大倍率近似1: 1的准对称结构,机械系统采用光学元件的包边设计和定心车工艺,达到秒级的光学装配精度;DMD像素级调光算法采用搜索单个微镜像素在图像帧周期间的控制权值实现,成像单元可同时兼顾科学级12 bit sCMOS和8 bit CCD,设计完成的原理样机验证了系统设计的正确性,其获取的图像动态范围可达140 dB以上,远高于传统摄像机78 dB的动态范围。Abstract: In some scenarios, very bright objectives and very dark objectives exist at the same time. The traditional imaging device can not detect these objectives, and then high dynamic range image acquiring system is needed to detect them. Digital Micro-mirror Devices(DMD) is used to get high dynamic range image, which is the most advanced technology at present. In this paper, a pixel level high dynamic range imaging system is designed based on DMD. The system is composed of optical system, mechanical system, DMD pixel level dimming algorithm and imaging unit. The secondary imaging system is used in the optical system. The first imaging optical structure is image space telecentric system, and the second imaging optical structure is magnification 1:1 quasi-symmetric system. Wrapping technology of optical elements and centering machining process are used in mechanical system, and the optical assembly precision reaches second level. The method searching for single DMD pixel's controlling weight is used in dimming algorithm. The science class 12 bit sCMOS and 8 bit CCD can be used simultaneously in imaging unit. The correctness of the system is proved by the prototype. The image dynamic range can reach 140 dB, much higher than 78 dB dynamic range of traditional cameras.
-
Key words:
- imaging system /
- high dynamic range image /
- digital micro-mirror device /
- dimming
-

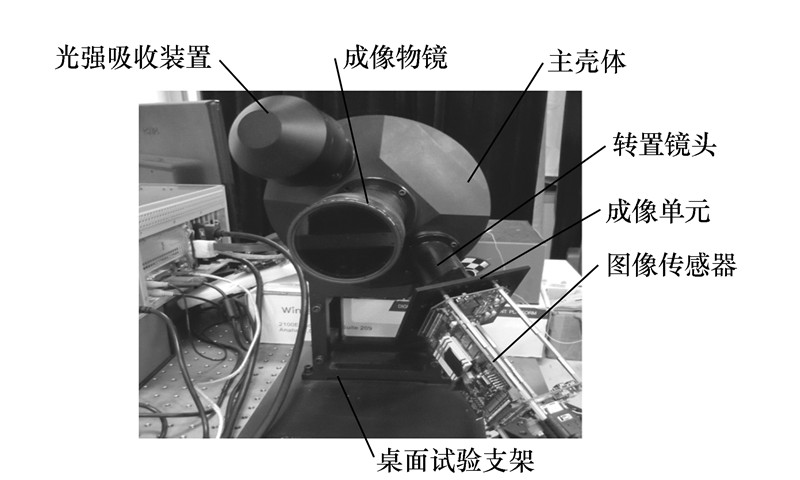
图 7 高动态范围图像获取系统原理样机
Figure 7. Prototype of the high dynamic range image obtaining system
-
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] -

 下载:
下载:





图(9)
计量
- 文章访问数: 2326
- HTML全文浏览量: 564
- PDF下载量: 647
- 被引次数: 0
