



 摘要
摘要 HTML全文
HTML全文 PDF 2120KB
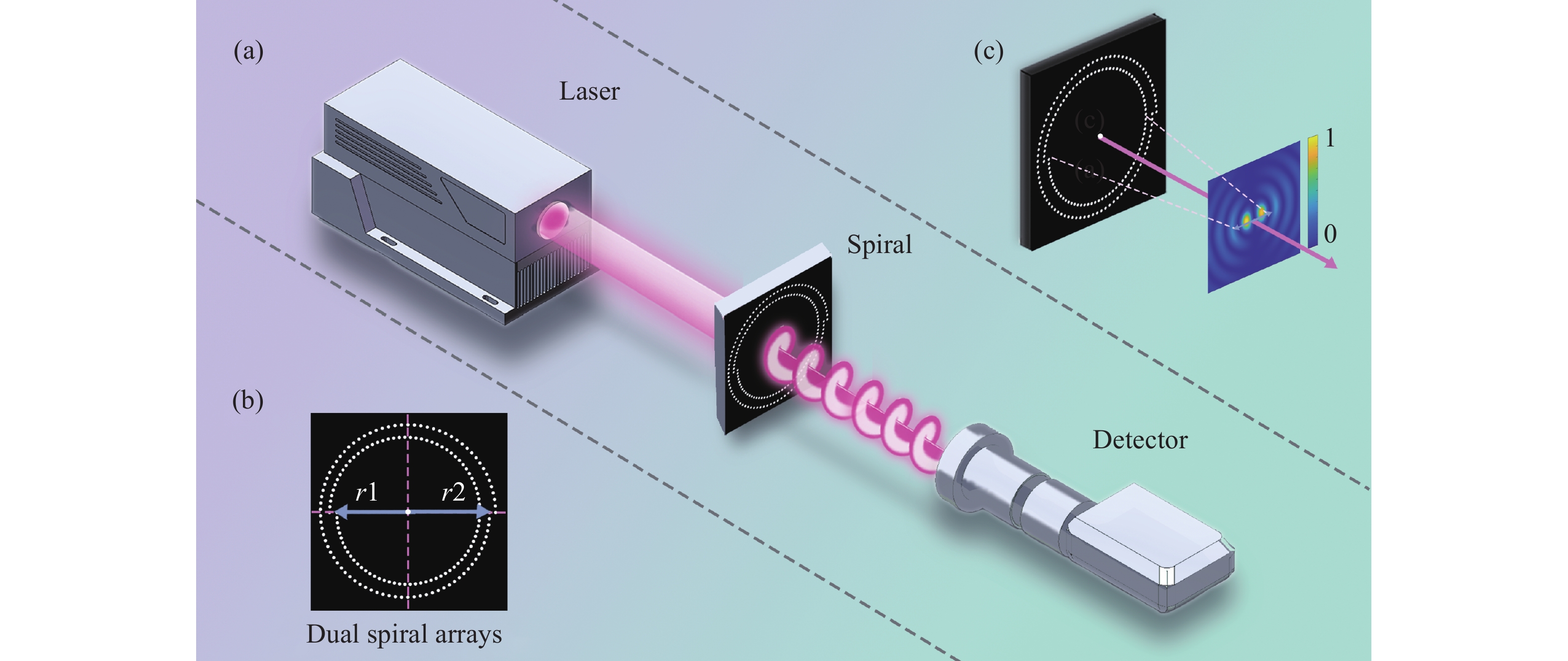
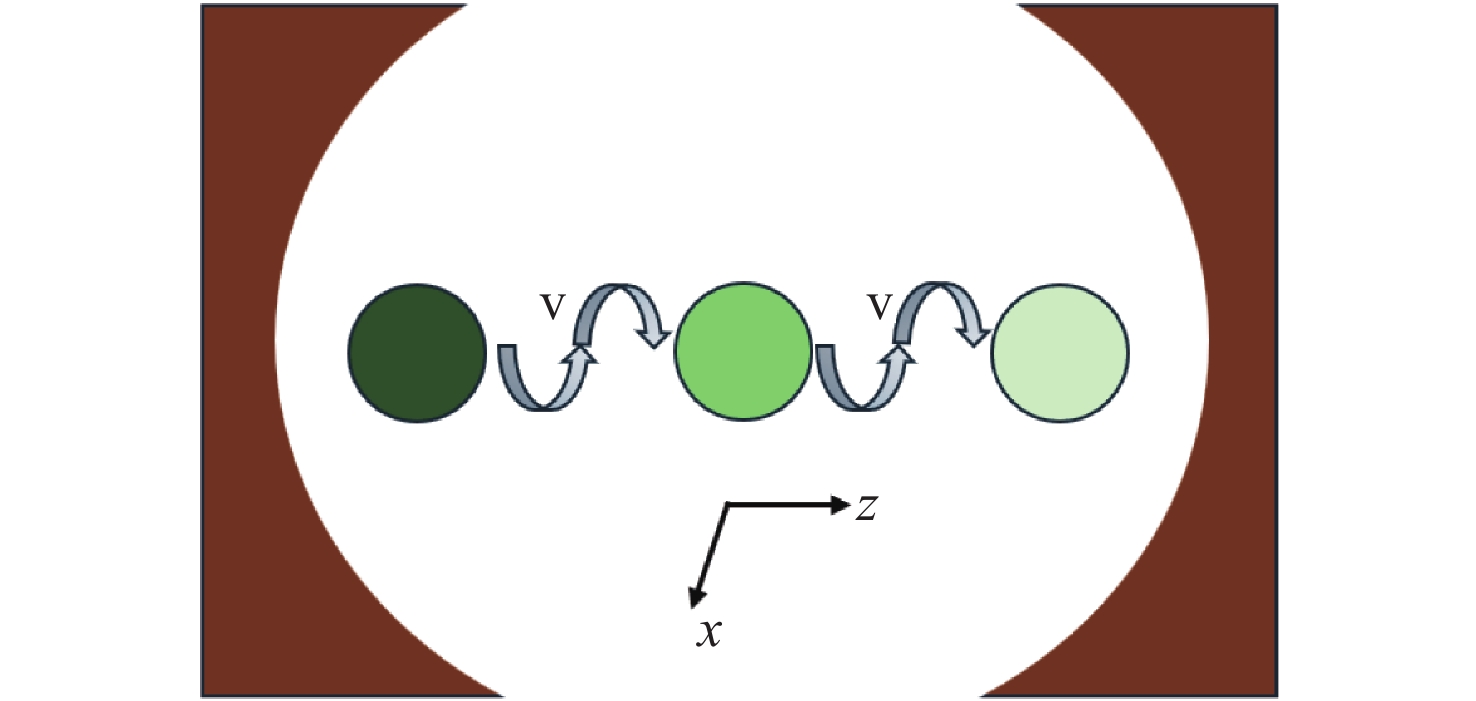
PDF 2120KB光场调控作为现代光子学的前沿研究方向,在生物医学显微成像、量子态操控及微纳制造等领域展现出重要应用价值。本研究针对现有光场调控技术在全参量精密操控维度受限的关键问题,提出基于双螺旋阵列的方位角光场动态调制新方法。通过构建具有差异化初始半径参数的空间交错螺旋结构,在保持周期参数一致性的前提下,实现了光场方位角分布从0到2π范围的连续光场调制。基于严格数值仿真,系统解析了双螺旋阵列结构参数与方位角光场分布的映射规律,揭示了螺旋半径差与方位角分布间的准线性对应关系。该理论模型不仅深化了空间结构光场调控的物理认知,更为可编程光学器件设计提供新的技术路径,在超分辨成像和光学镊子等应用场景中展现出显著的技术优势。
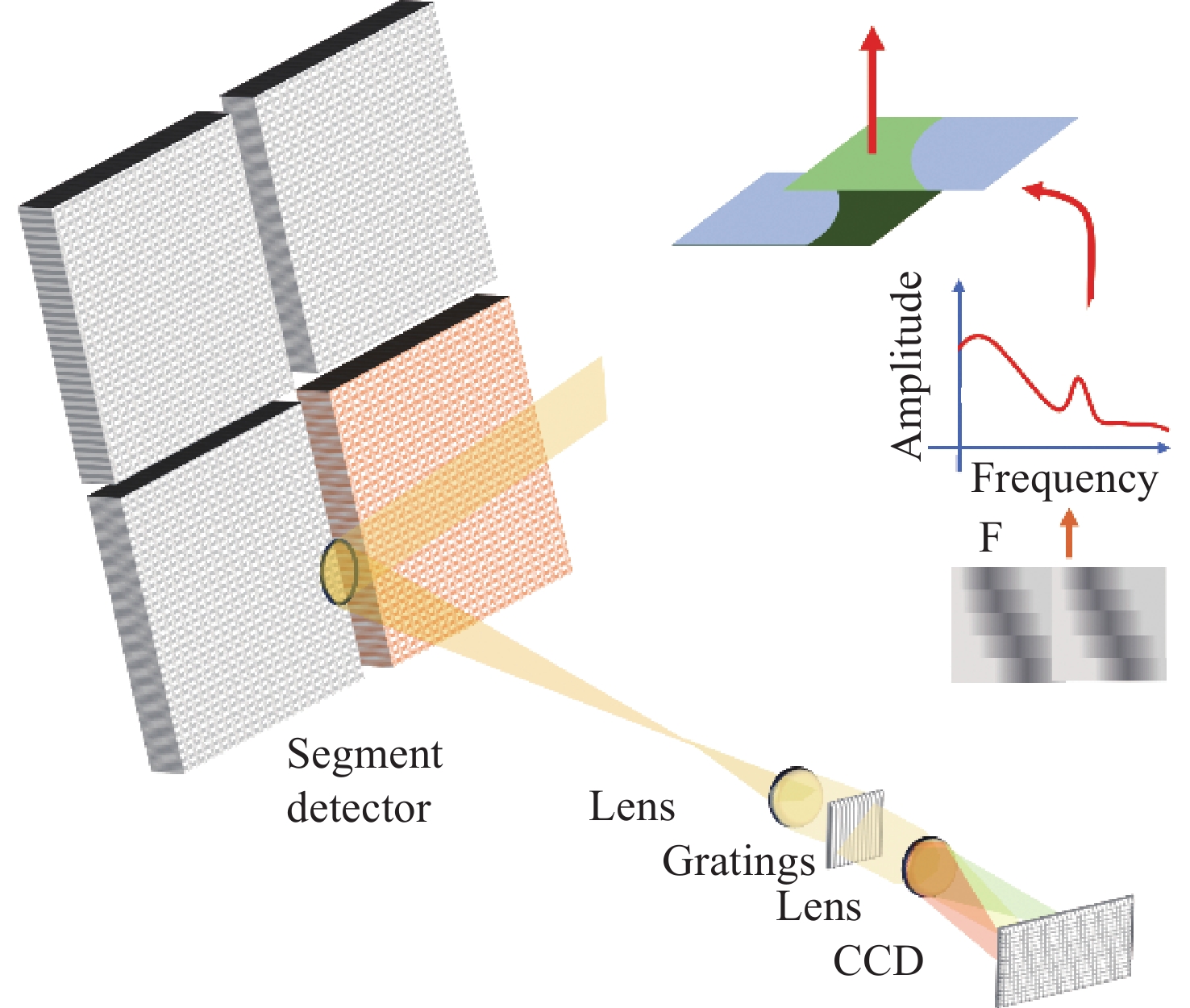
受探测器材料和技术的限制,大尺寸探测器需要进行拼接和集成才能有效成像。对于拼接式大靶面探测器,拼接平整度直接决定了能量利用率和图像清晰度。同时,由于拼接探测器的调整范围有限,还需要对基准构建进行约束。针对上述问题,本文提出了一种基于通道光谱色散的新型探测器平整度检测方法。通过测量共面调整的干涉条纹,将调整后的残差控制在300 nm以内,验证了整个技术的可行性,并为下一代大口径天文巡天设备和大型目标探测器的发展提供了重要的技术支持。
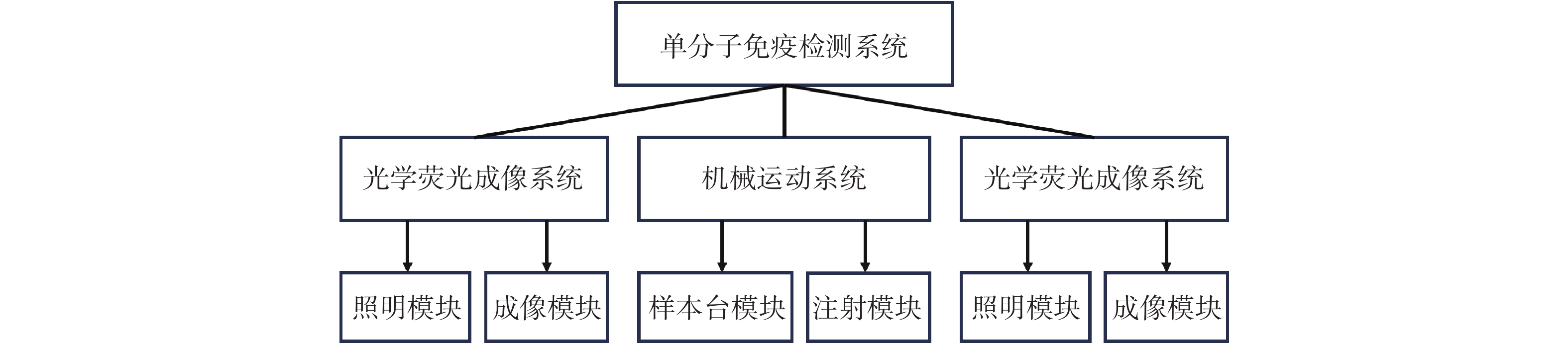
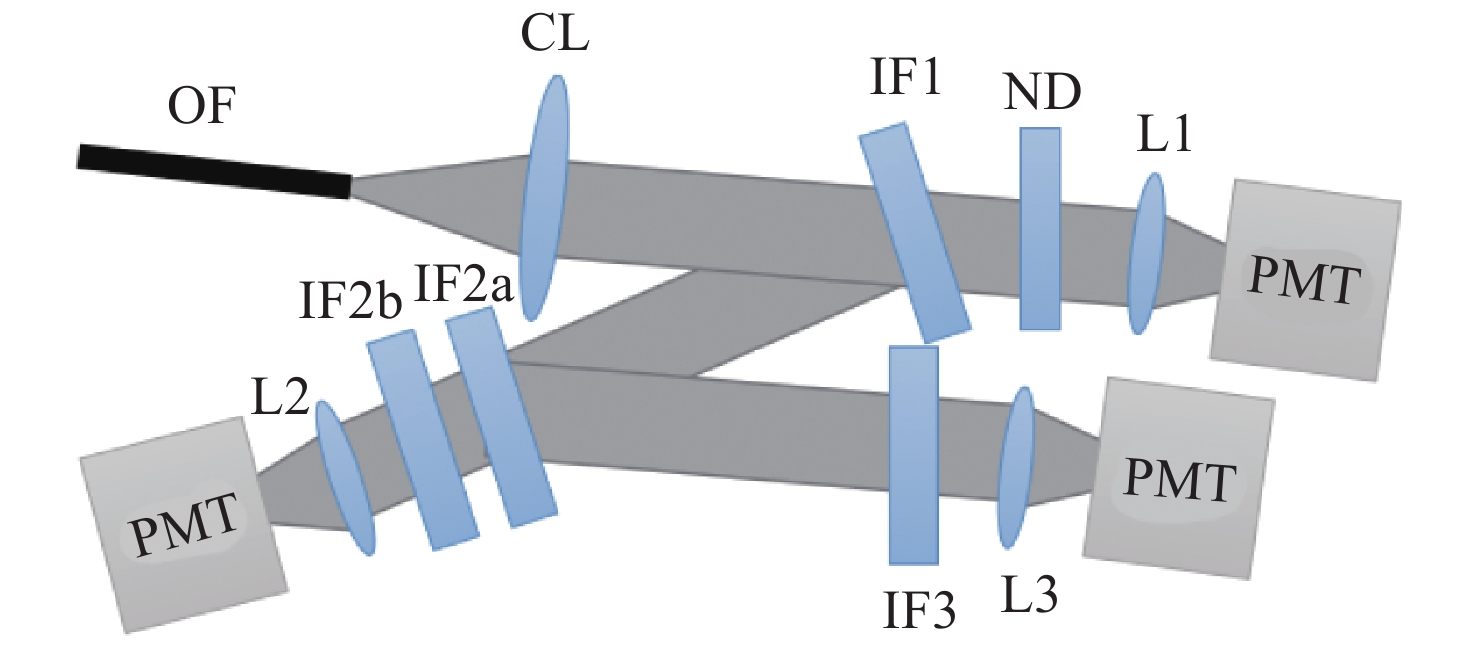
为实现肿瘤标志物的早期诊断,本文设计了一种适用于流动相样本的单分子免疫检测系统,并对其光学荧光成像平台及图像检测计数算法进行了研究。首先,为满足低浓度、高通量样本的即时检测需求,提出了一种基于流动相的单分子免疫检测方法。其次,结合微流控芯片的规格要求,设计了一套光学荧光成像检测平台,通过滤光和分光元件的合理配置,利用多模块集成实现荧光样本的高分辨率成像。最后,在离焦粒子的图像检测计数算法的基础上,优化了特征匹配方法,以高效处理非焦面荧光粒子信号。实验结果表明,本系统在单分子免疫标志物样本检测中的下限可达到0.001 pg/mL,在0.001~1 pg/mL的理论检测范围内,精度小于10% CVs,可在一小时内完成最多十份样本的检测。本系统满足了单分子免疫检测的稳定性、高灵敏度和高通量检测需求,在癌症早期筛查领域具有重要的应用前景。
为了解决现有超构表面位移测量技术无法同时测量多个物理量的问题,本文设计了一种超构表面级联结构,可用于同时测量径向角位移和纵向线位移。首先,根据级联超构表面对圆偏振光的联合相位调制阐述了位移测量的工作原理。接着,以琼斯传输矩阵分析了相位延迟携带的位移信息,推导了角位移与线位移的数学表征。然后,以设计目标作为约束条件优化单元结构参数,构建超构表面的模型。最后,采用时域有限差分法对超构表面结构进行模拟,验证方法可行性并分析器件测量性能。结果表明,在633 nm的工作波长下,角位移灵敏度为
利用直拉法成功合成了具有高光学质量的Yb:CaGd0.33Y0.625AlO4 (Yb:CGYA) 激光晶体。引入的Gd3+离子有助于保持原始结构,并有效诱导Yb3+离子发射光谱的非均匀展宽。Yb:CGYA 晶体的荧光发射峰波长为
为实现光学传递函数的低成本、实时测量,本文提出基于哈特曼探测器的光学传递函数测量方法。首先,基于哈特曼探测器的测量波面,给出光学传递函数的测量方法。然后,设计传函测量光路,并给出焦深、像差和焦距的测量方法。同时,设计了物镜像差的标定光路,并给出标定方法。最后,搭建实验光路,实现了单透镜的调制传递函数(MTF)、像差、焦距、焦深及色差的测量。结果显示,该方法实现了0~1° 视场透镜的MTF测量;透镜的像散、慧差及球差分别为0.114 λ、0.128 λ和0.02 λ;0°视场下透镜的色差在红、绿、蓝三个波长下分别为0.047 λ、0.055 λ、0.048 λ,1°视场下增长到0.117 λ、0.176 λ和0.154 λ;焦深为0.454 mm,误差2%,焦距为74.6 mm,误差0.8%。结果表明该测量方法能够实现透镜的传函测量,为光学系统传函的低成本、实时测量提供技术途径。
为了解决基于光学游标效应的光纤应变传感器中传统光谱跟踪解调方式测量精度不足、测量范围小的问题,本文提出了一种改进型互相关算法并将其应用于游标型光纤应变传感器信号解调。该算法通过互相关操作从采集的光谱数据中识别出与待测光谱最为相似的光谱,然后通过加权计算得到预测应变值。由于该算法使用了被测量光谱中包含的全部信息,因此可以得到更准确的结果和更大的测量范围,经过实验验证,获得了
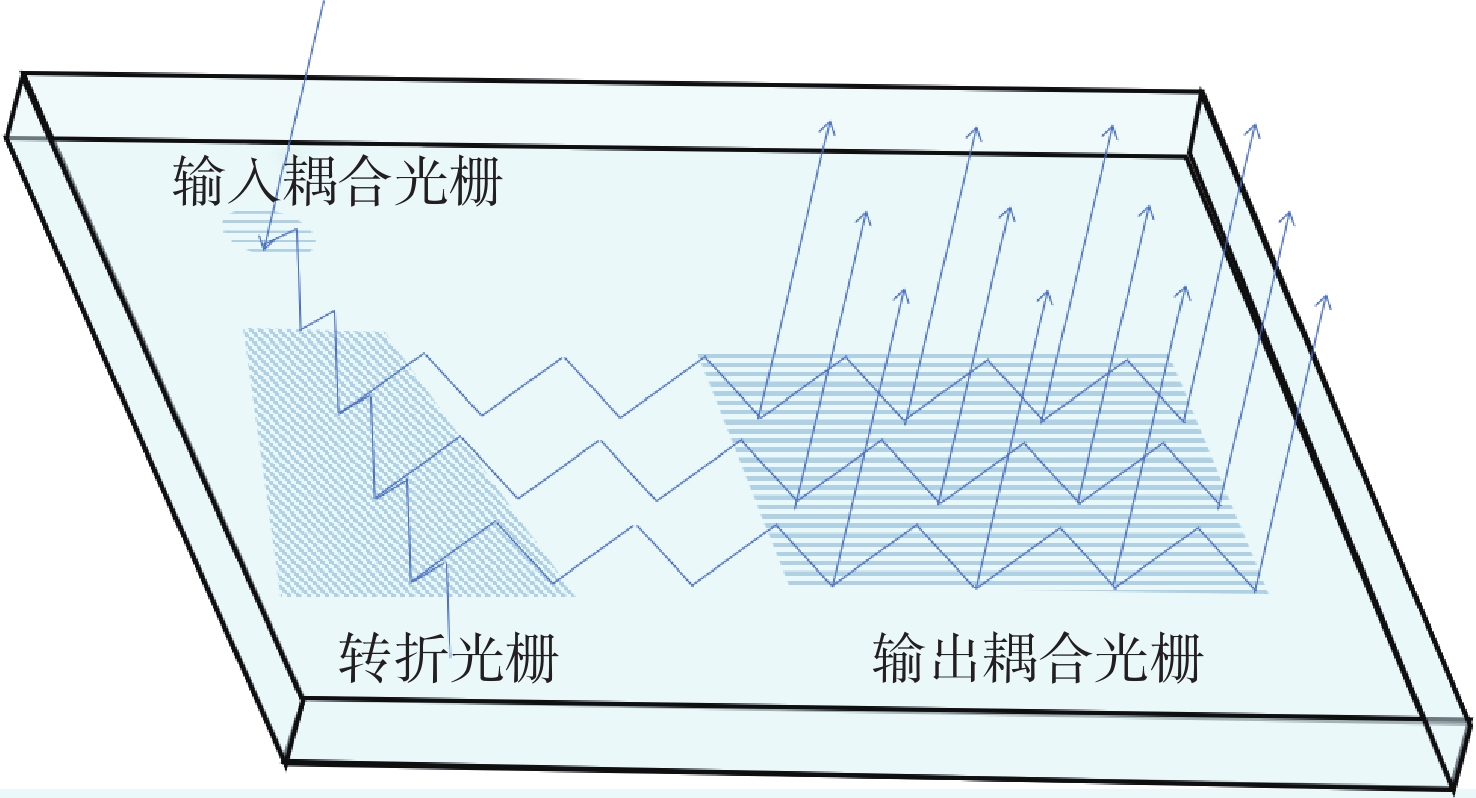
自主研发了国内首款基于光线场追迹的3D可视化光波导设计仿真模块,并应用该仿真模块设计了一款二维出瞳扩展的衍射光波导。展示了从光栅的

超疏水表面作为一种有效的被动防冰方法,可以减少低温环境下金属表面的结冰。然而,由于其通常采用的有机物修饰在恶劣环境下易老化,从而导致防冰性能下降或完全失效等严重问题。本文采用飞秒激光掺杂制备微结构方法在对铝合金表面进行微观形貌和化学成分的同时改变,实现材料表面无有机涂层的超疏水防冰效果。与未加工铝合金和传统氟硅烷改性的铝合金表面相比较,激光掺杂加工后的铝合金表面具有较低的热导率和仿生蚁丘群结构,使得其具有良好的延迟结冰时间(803.3 s)和较低的冰附着力(16 μN)。此外,这种本征超疏水金属表面在防冰性能方面也表现出优异的环境耐久性。这些研究结果证实了我们获得的无有机涂层超疏水样品在防结冰方面的有效性。

含有数字微镜阵列(DMD)的长波红外偏振光学系统中产生的衍射现象会导致系统中偏振像差发生变化,从而造成长波红外偏振光学系统偏振测量精度下降,针对这一问题,提出一种含DMD的长波红外二次成像光学系统偏振像差分析及补偿方法。首先,构建长波红外偏振光学系统中波长与DMD尺寸关系的衍射与偏振像差特性传输模型,提出基于矢量衍射—偏振光琼斯矢量理论的偏振像差分析方法。其次,推导DMD的偏振像差和偏振度情况,确定DMD的最佳衍射级次、入射角与衍射效率,进而设计含DMD的二次成像长波红外偏振光学系统,得到DMD衍射特性对偏振像差的影响情况。最后,通过倾斜投影物镜、镜片镀膜及减小表面入射角来补偿光学系统的偏振像差,以解决衍射现象对长波红外偏振光学系统偏振像差产生的影响。仿真结果表明,系统全视场调制传递函数在截止频率处均接近衍射极限,最大畸变小于0.2%,成像质量良好,整体系统的二向衰减经补偿后减小到原来的1/12。该分析模型能够揭示衍射与偏振像差之间的关系,该补偿方法可以使偏振像差有效地降低。

本文研究了一种特异材料构成的波导阵列中光传输的类布洛赫振荡特性。这种准周期波导阵列由金属和介质两种介质按斐波那契数列的顺序排列组成。通过研究高斯脉冲在结构中传输时的光场分布,可以直观地观察其光场演化情况。在没有引入厚度梯度或介电常数梯度的情形下,在第九代斐波那契准周期波导中发现了3种振荡模式。另外,随着入射脉冲波长的增加,在第九代和第十代斐波那契准周期波导中类布洛赫振荡周期产生了红移,这为布洛赫振荡调控提供了一种有意义的途径。
光学系统的偏振特性会改变入射光的偏振态,从而对成像质量、探测精度等产生影响。对于望远镜、光刻物镜等光学仪器,偏振特性是决定系统性能的重要因素之一。因此,抑制光学系统偏振特性的不利影响是实现高性能现代光学系统的关键之一。本文总结了光学系统偏振特性影响抑制方法的研究现状,并将已有方法归结为三类:偏振定标、偏振补偿和低偏振优化设计。介绍了上述三种方法的基本原理,并结合应用实例对各种方法进行了分类与讨论。最后,分析了三种方法的联系及其相互之间的协同应用,并对光学系统偏振特性影响抑制方法的未来发展进行了讨论与展望。
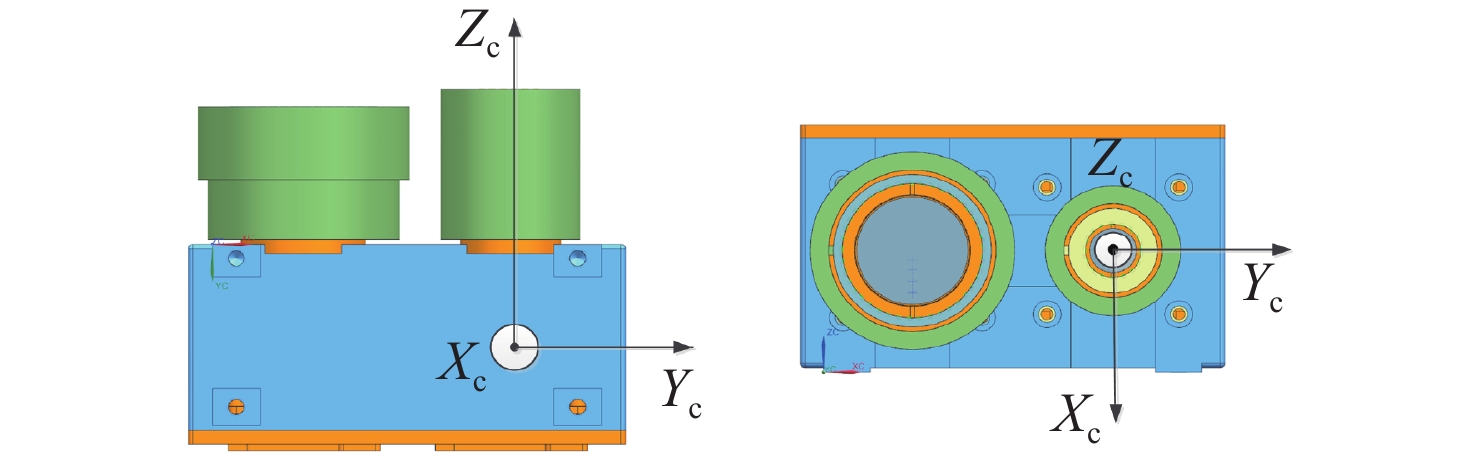
为提高测量系统的稳定性及精度,实现航天器超近距离高精度对接,本文提出了一种基于单相机及合作靶标的相对位姿测量系统,用于双星间相对位置及姿态的高精度测量。通过设计追踪星视觉相机及目标星LED合作靶标,在双星距离为50米到0.4米的范围内,实现了高精度的相对位姿测量。首先,通过设计的远近场LED靶标,实现了相机与靶标间的协同工作,保证在50米到0.4米的距离均能清晰成像;其次,根据设计的靶标特性,提出了多尺度质心提取算法,利用斜率一致性约束与间距比筛选,在复杂光照下稳定获取特征目标;最后,结合靶标几何约束的初值估计,实现了目标星相对于追踪星的位姿解算,为进一步提高测量精度,引入非线性优化方法对位姿结果进行迭代优化,有效降低了测量误差。试验结果表明,系统测量精度由远及近逐渐提高,在距离为0.4米时,位置测量精度优于1毫米,姿态测量精度优于0.2度,满足超近距离对接任务需求。本方案为空间在轨目标相对位姿测量提供了高精度、高稳定性的技术支撑,具有重要的工程应用价值。
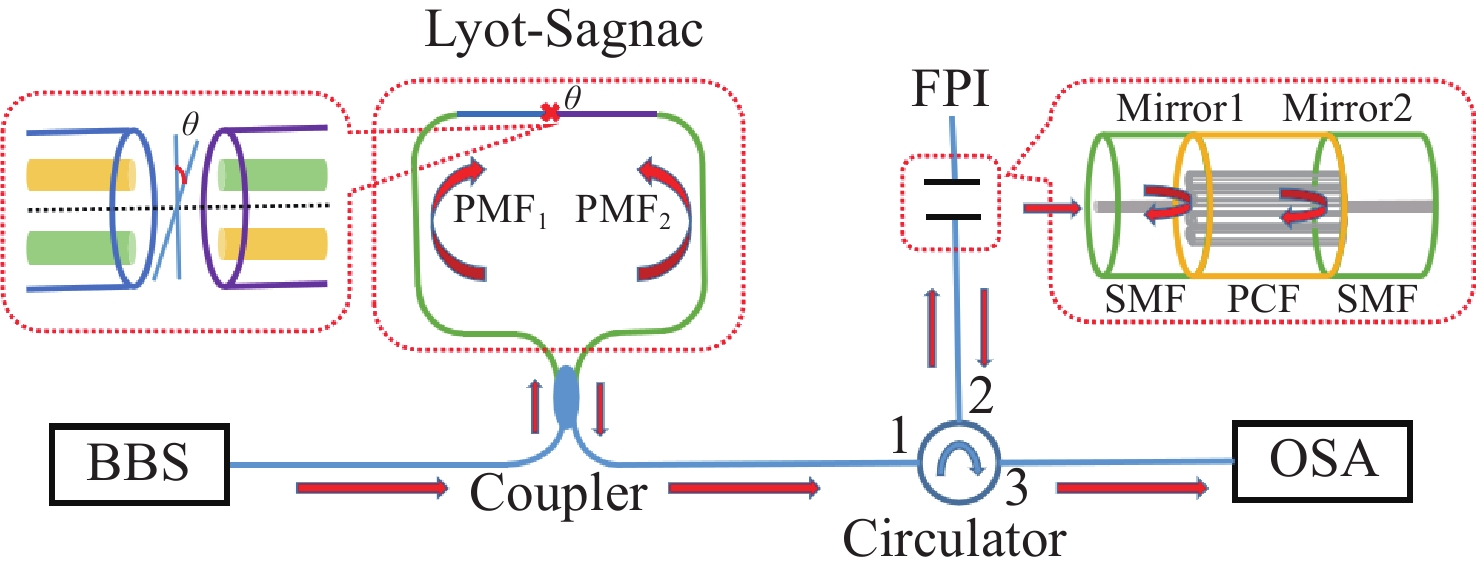
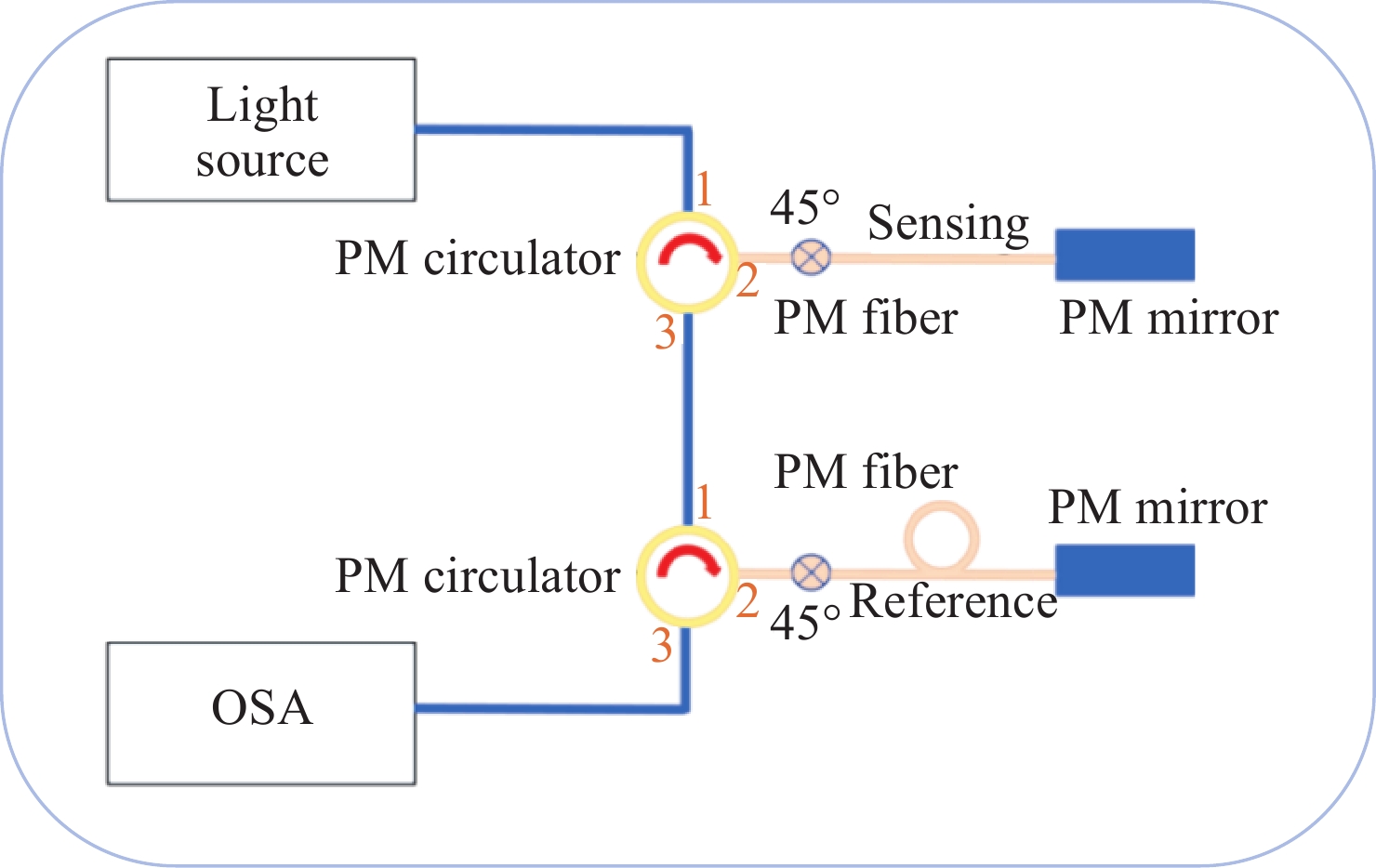
为了有效提高检测灵敏度和实用性,本文提出了一种基于游标效应增敏的Lyot-Sagnac传感结构与Fabry-Pérot干涉仪(FPI)级联的光纤温度传感器。其中,Lyot-Sagnac传感结构是通过90°旋转熔接不同长度保偏光纤(PMF)制作的,FPI是利用空芯光子晶体光纤作为F-P腔制作的。理论分析结果表明,通过90°旋转熔接方法制作的Lyot-Sagnac传感结构输出光谱包络良好,并与FPI级联利用游标效应能够显著提高传感器温度检测灵敏度。实验结果表明,级联传感器分别以Lyot-Sagnac传感结构中不同长度的PMF作为传感部位时,温度检测灵敏度为12.56 nm/°C和 92.77 nm/°C。相比于单独的Lyot-Sagnac干涉结构,本文提出的传感器灵敏度提升了约57倍。此外,在同一测量带宽情况下,PMF1模式的测量范围是PMF2模式的9.3倍。因此,相较于传统游标效应光纤温度传感器,本文提出的双响应模式温度传感器不仅具有良好的检测灵敏度,而且利用同一光谱检测设备可有效适配不同检测范围与灵敏度需求的应用场景,为性能可调式光纤温度传感器的研发提供了一种新思路。
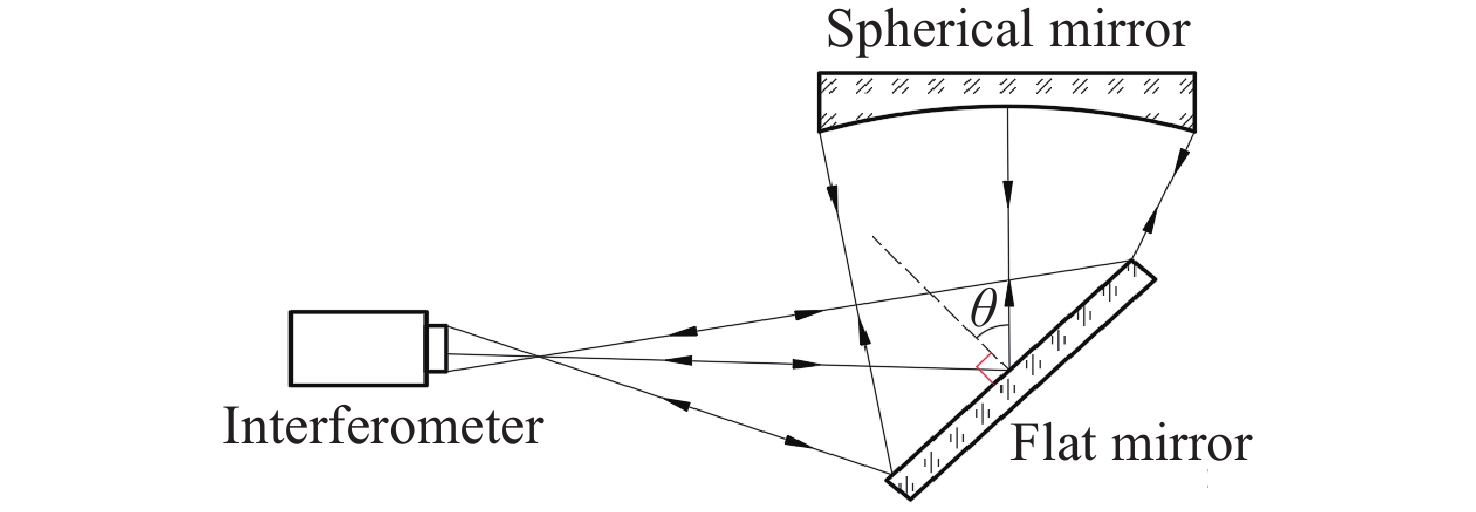
针对现有瑞奇-康芒法检测大口径平面反射镜的数据处理方法中存在通用性较低、检测中的数据易受环境稳定性影响等问题,本文提出了一种灵敏度矩阵分析结合光线追迹的数据处理方法,对瑞奇-康芒法检测获得的数据进行处理分析,实现了对大口径平面镜的高精度面形检测。首先在Zemax软件中建立了瑞奇-康芒光学检测模型,并采用光线追迹算法获得了灵敏度矩阵,使用灵敏度矩阵计算并分离检测过程中存在的误差,相比直接采用泽尼克拟合方式去除像差的方法具有更高的检测精度,避免了近似拟合对数据处理结果的影响,其次对基于灵敏度矩阵的数据处理算法进行了仿真验证。将该算法应用于口径200 mm平面镜的瑞奇-康芒法检测实验,通过与直接采用干涉仪检测结果的交叉对比,验证了该数据处理算法的正确性。进而将该方法应用于口径为2.2 m平面镜的制造流程中,最终获得的面形结果均方根误差优于1/50
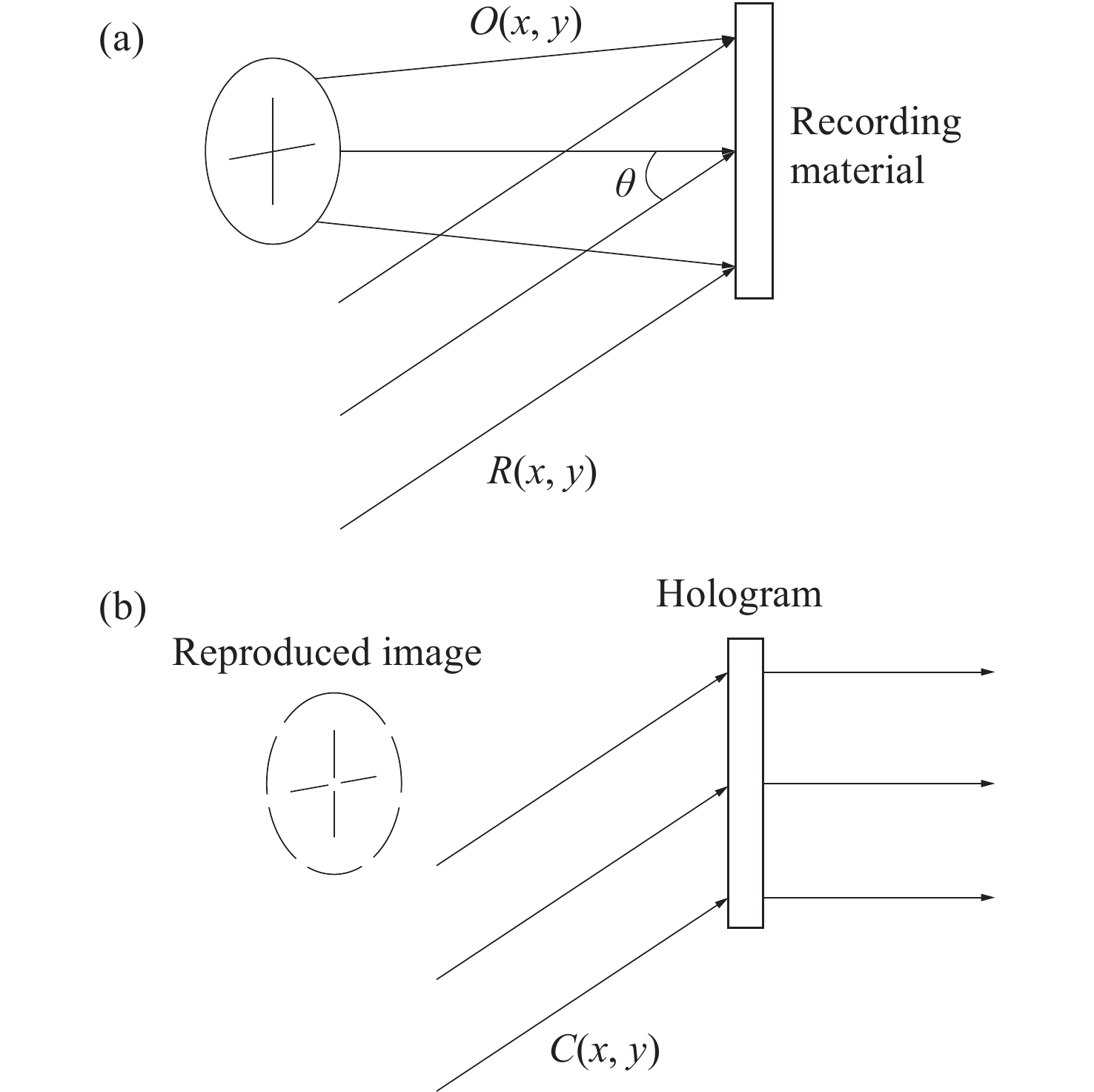
本文根据计算全息再现成像原理,采用Gerchberg-Saxton (GS) 算法对输入与输出平面光场分布进行正、逆傅里叶变换迭代求解,得到原始仿真图像在不同特征参数(线宽、圆环直径)和不同计算采样间隔下的相位分布,并仿真计算得到相应的再现图像。利用液晶空间光调制器搭建全息再现实验光路,通过加载不同原始仿真图像的相位分布图进行再现实验,采用相机拍摄得到远场衍射全息再现图像并进行图像处理得到再现图像的实际特征尺寸。实验结果表明:再现图像特征尺寸与原始仿真图像特征尺寸基本呈线性变化关系,再现图像尺寸与仿真计算采样间隔呈现非线性变化关系,且与理论推导的关系曲线一致。为了进一步验证结论的正确性,设计预期再现图像尺寸,当圆环直径为0.943 mm,中心十字线宽为0.015 mm时,仿真计算得到预期目标原始仿真图像的特征尺寸和采样间隔分别为线宽3 pixel、圆环直径594 pixel、采样间隔25 μm。通过再现实验测量得到的全息再现图像圆环直径为0.93 mm,线宽为0.017 mm,误差精度在0.02 mm以内。本文研究结果对全息显示、AR/VR显示等应用场景下虚拟显示图像尺寸真实性提高提供了有益参考。
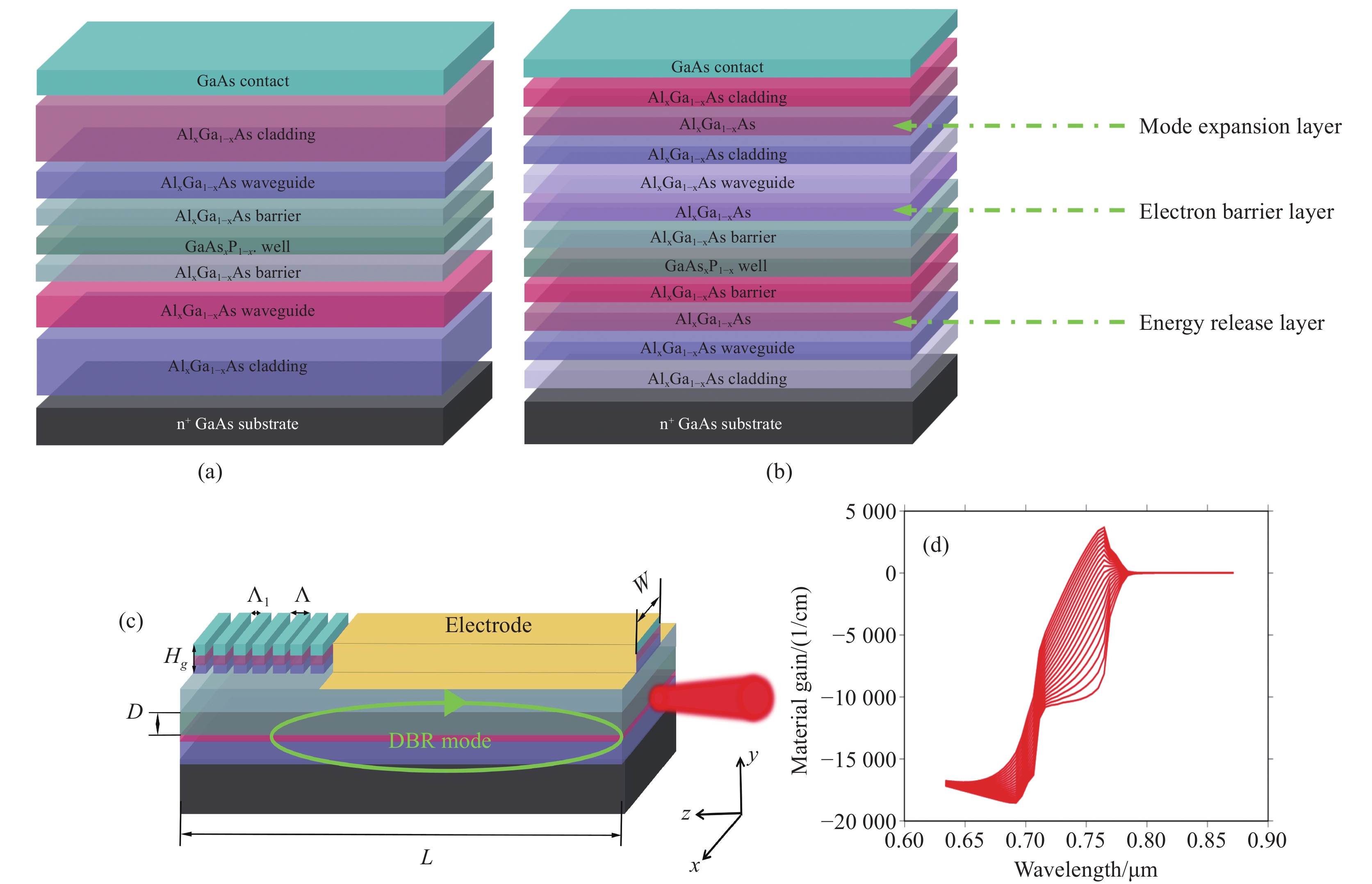
本文提出了一种新型 785 nm 半导体激光器件。在 p 侧外延中加入了薄限制层和模式扩展层结构,两者对光栅刻蚀深度的调节有很大影响。p 侧波导层的减薄使得光场偏向 n 侧包层。通过协调限制层的束缚效应,可以调节 P 侧的光限制因子。另一方面,模式扩展层的引入促进了 p 侧限制层上模式的扩展。这两个因素都有助于减少光栅蚀刻深度。与已报道的对称波导外延结构相比,新结构在确保足够反射强度和维持谐振的同时,大大减少了光栅的蚀刻深度。此外,为了提高器件的输出性能,还对新的外延结构进行了优化。在传统外延结构的基础上,增加了能量释放层和电子阻挡层,以提高电子复合效率。改进后的结构虽然增益面积较小,但输出性能却与对称波导相当。
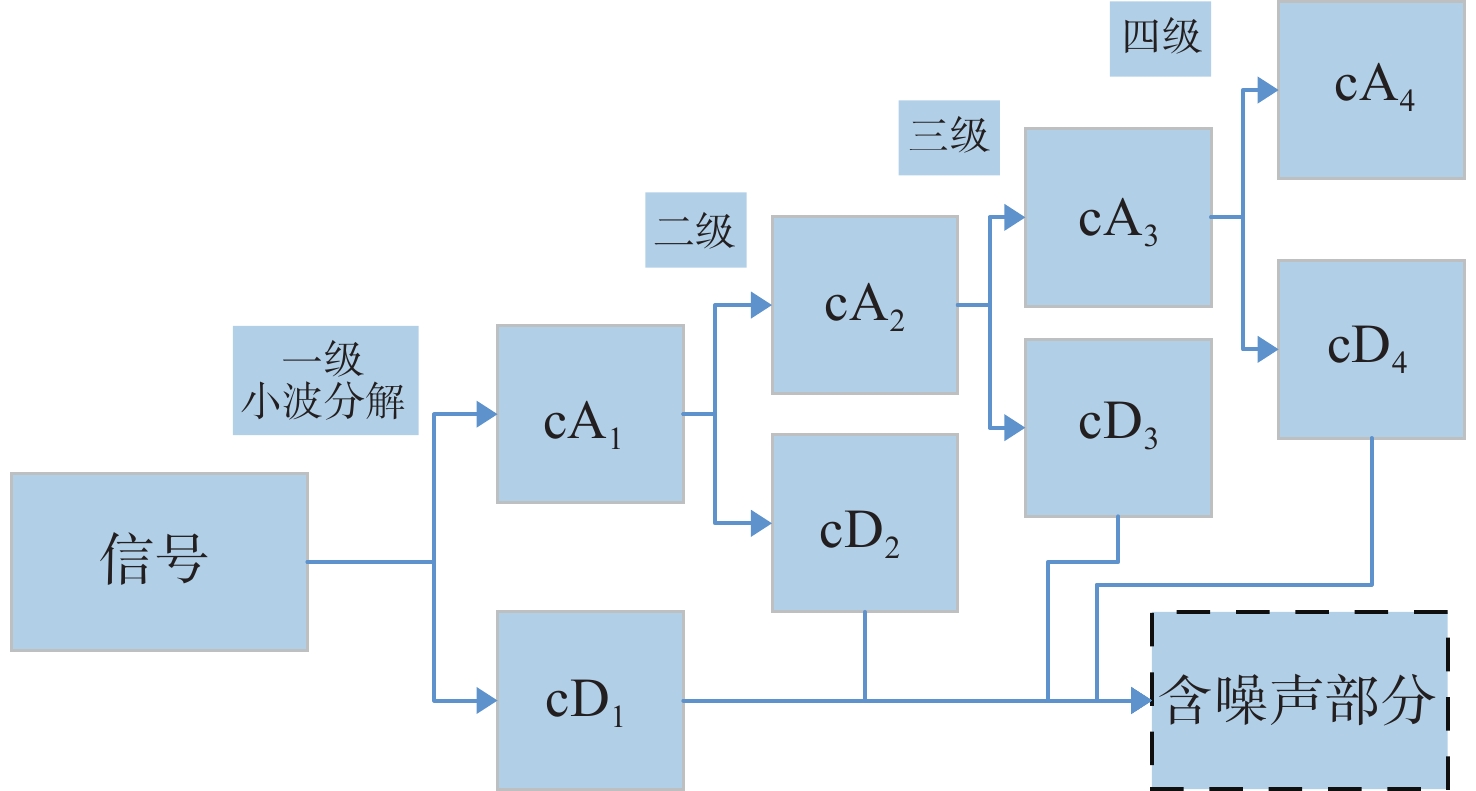
光谱技术可以从大量的原始信号中提取有用的特征信息,直接用来分析和识别被观测样品的物质成分,在生物医药、食品安全、军事侦察中具有极高的应用价值。由于预处理目的与效果的不同,目前存在多种光谱预处理方法。根据目前方法使用时存在的问题,本文提出了一种基于多尺度小波变换的光谱数据预处理方法,并通过仿真光谱和实测光谱对提出算法和设计软件的性能进行了测试。仿真信号信噪比为0.5 dB,经本文算法处理后,信噪比可达8.978 dB;仿真中加入5种不同类型的基线,包括线型、高斯型、多项式型、e指数型、sigmoidal函数型,使用本文算法进行基线估计,估计值的均方根误差RMSE分别为
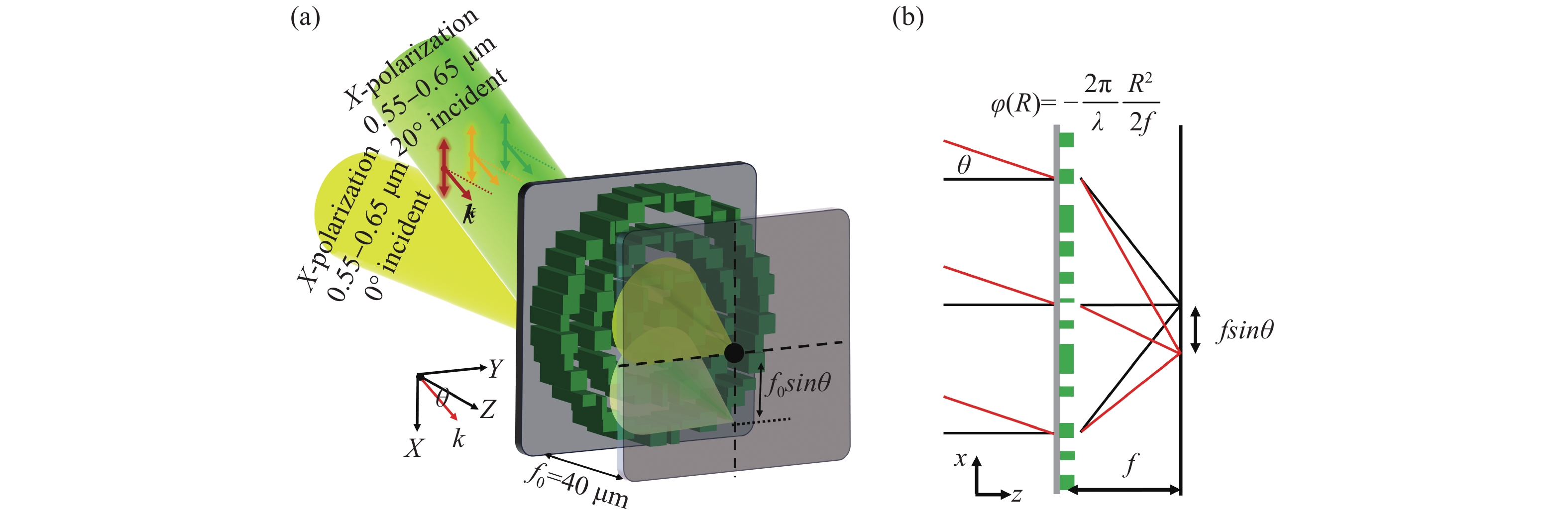
超构表面透镜存在离轴像差和材料色散,在成像探测领域无法同时兼顾视场和工作带宽。本文基于单片超构表面构建可见光大视场消色差超透镜。采用二次型相位实现大视场探测,进一步通过粒子群算法(particle swarm optimization, PSO)优化超构表面单元结构传输相位实现连续波段色散调控,因此在满足大视场下拓展工作带宽。对于单片超构表面透镜数值孔径0.351,在0.55 μm~0.65 μm波段内实现了±20°视场角的消色差光场聚焦。在工作波段和视场范围内焦距纵向误差≤3.2 μm(~0.08
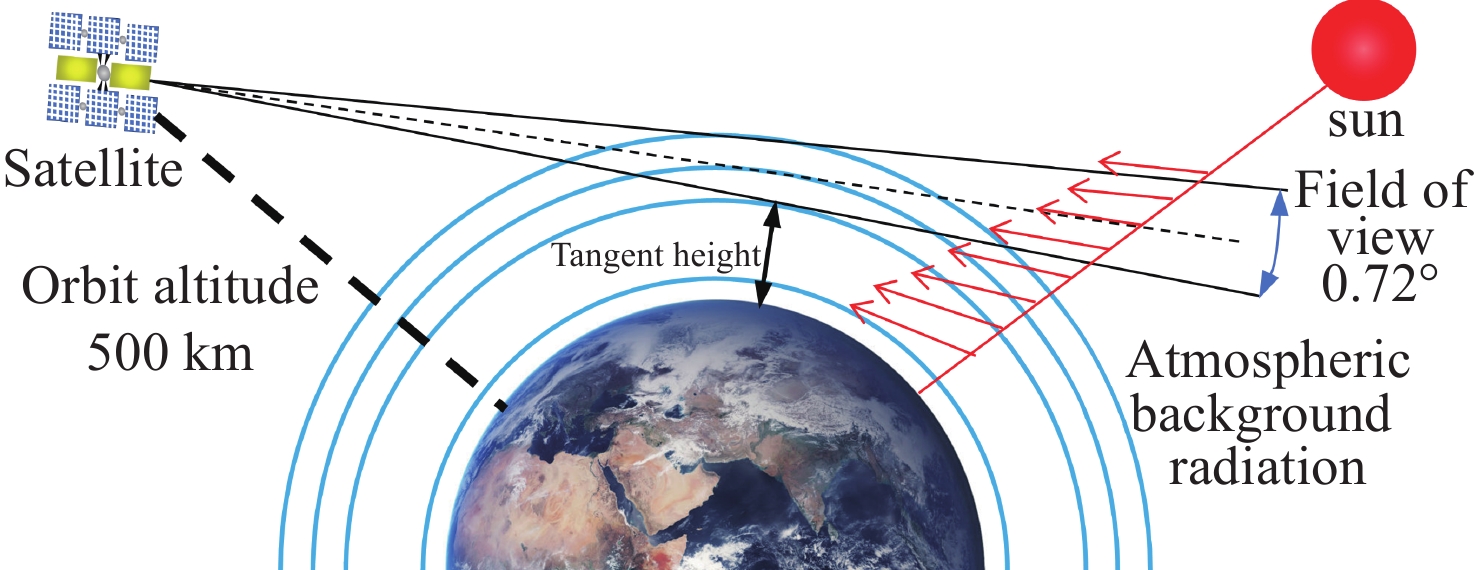
由于大气背景辐射对多普勒非对称差分(DASH)干涉仪风场探测成像质量产生影响,本文对其进行研究并设计杂散光抑制结构。基于轨道参数和观测几何,分析不同高度下大气背景辐射对系统信噪比(SNR)影响。随后,结合系统参数和信噪比变化规律设计遮光罩,并通过点源透过率(PST)评估抑制效果。结果表明,随着高度降低,大气背景辐射逐渐增强,从而导致信噪比逐渐下降。从PST曲线可知,系统视场内PST保持稳定,遮光罩未影响对目标光线的探测;视场外PST随离轴角增加而降低,在杂散光抑制角1.07°附近降至10−8以下,所提抑制设计满足系统对大气背景辐射的抑制要求。
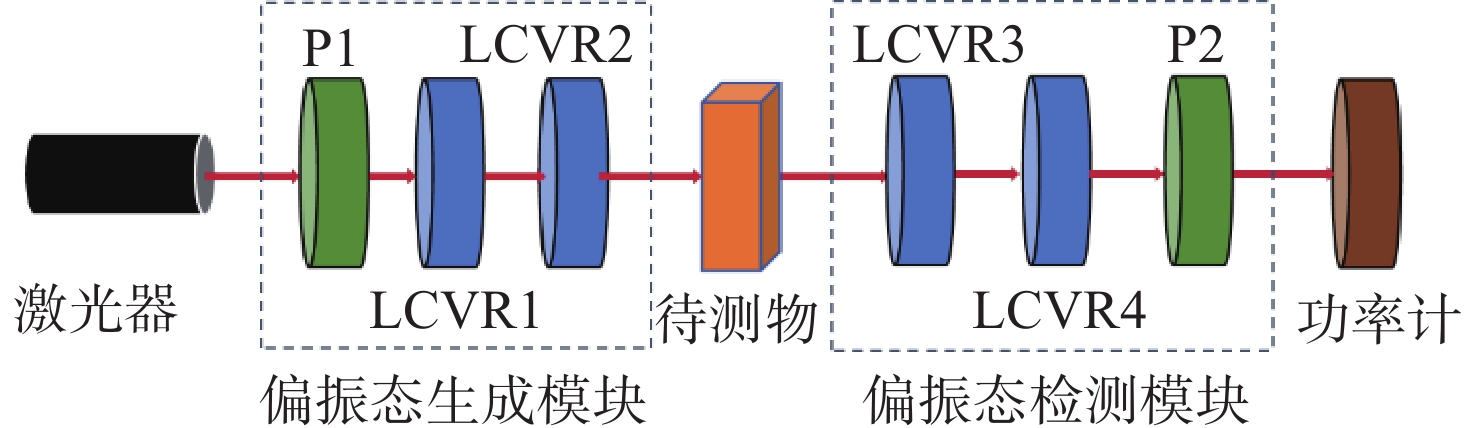
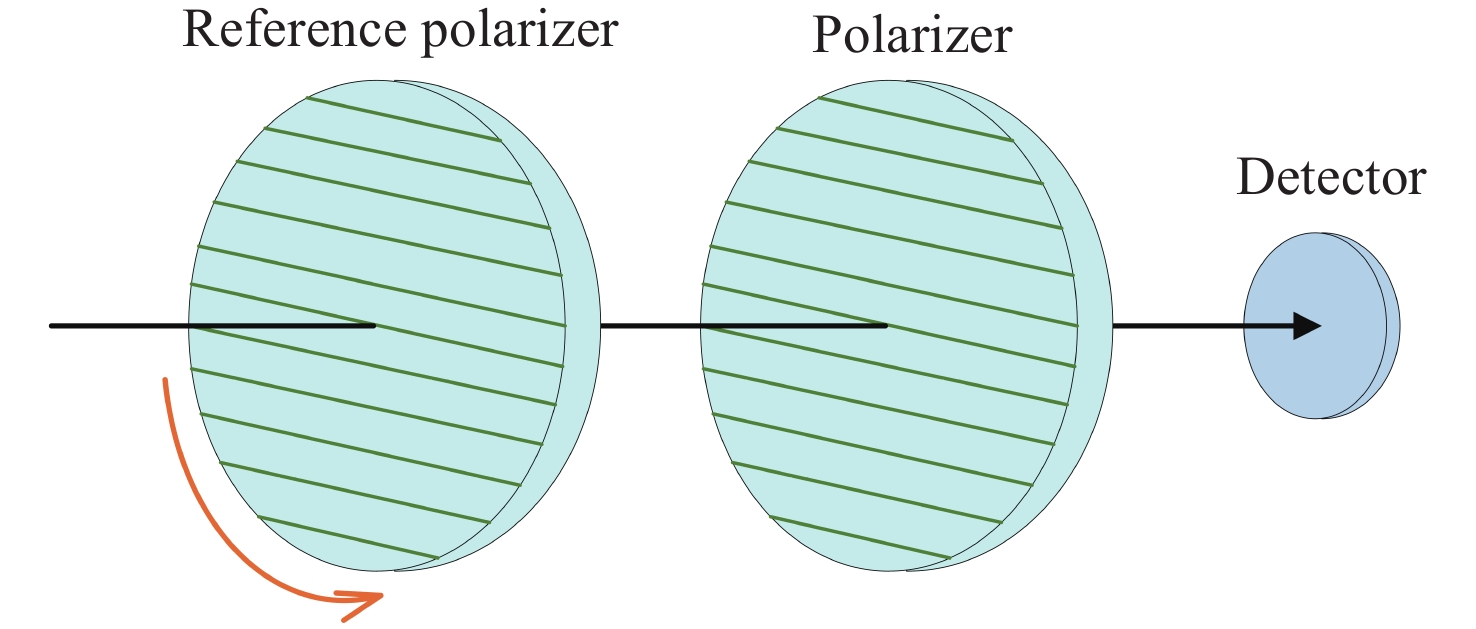
为实现穆勒矩阵的高速测量,本文提出一种基于过压驱动的穆勒矩阵高速测量方法。首先,建立基于液晶的穆勒矩阵仿真模型,仿真分析了待测物穆勒矩阵测量的可行性。其次,给出液晶相位延迟器的过压驱动方法,并利用过压驱动技术缩短了偏振态的切换时间。最后,实验测量了空气、偏振片及1/4波片的穆勒矩阵。实验结果表明:6个偏振态的生成频率从71 Hz提升到417 Hz,穆勒矩阵的测量频率从10 Hz提升到60 Hz,提升约6倍;同时,穆勒矩阵测量均方误差(MSE)优于

为了对古城墙修复性能进行科学评估,本研究以明代得胜堡长城为对象,采用太赫兹时域光谱(THz-TDS)与红外热成像技术对其土坯砖垒砌法修复段(1区)、保存完好段(2区)和逐层夯筑法修复段(3区)进行检测分析。结果显示:1区的THz光谱数据(时延为3.72 ps、折射率2.224)与原始墙体(2区时延3.02 ps、折射率2.107)差异显著,而3区THz光谱数据(时延3.12 ps、折射率2.098)与2区的几乎一致;红外热像图也表明3区的热均匀性更好,裂缝、毛细现象、生物病害的发生率更低,基本达到了“修旧如旧”的目的。因此,将城墙区域的红外热像图与原位取样的THz光谱相结合方法,不仅可以对修复性能进行定量评估,而且可以为传统工艺科学化评价提供新手段。
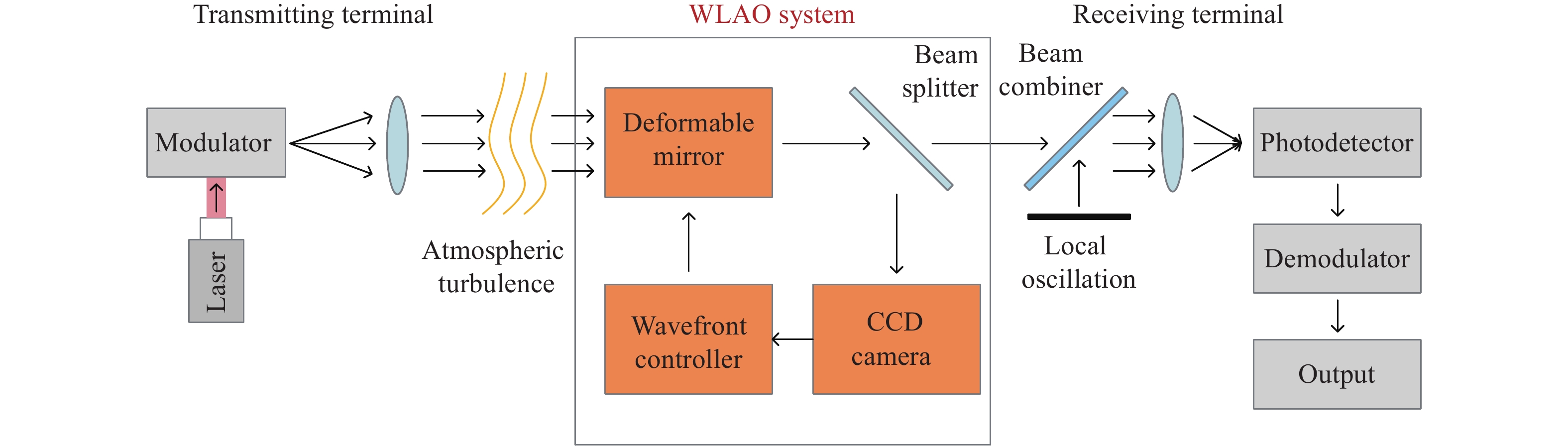
为了补偿大气湍流对相干自由空间光通信的影响,本文提出了一种基于改进模拟退火算法的自适应光学系统,旨在优化系统的混频效率和降低误码率,从而提升整体系统性能。首先,介绍了含有无波前自适应光学部分的相干光通信系统的组成,并重点分析了混频效率和误码率等关键参数。随后,详细阐述了改进模拟退火算法的工作原理及其在自适应光学系统中的应用。为了验证算法的有效性,进行了数值模拟分析,并与传统算法进行了对比分析。最后,在实验平台上收集实际数据以进一步评估算法性能。实验结果表明改进模拟退火算法相比于普通模拟退火算法,迭代次数减少50%的情况下,误码率降低到10-9,混频效率提高到0.9。改进模拟退火算法可以减少传统自适应光学系统的迭代次数,提高波前校正的精度,满足通信系统的需求。
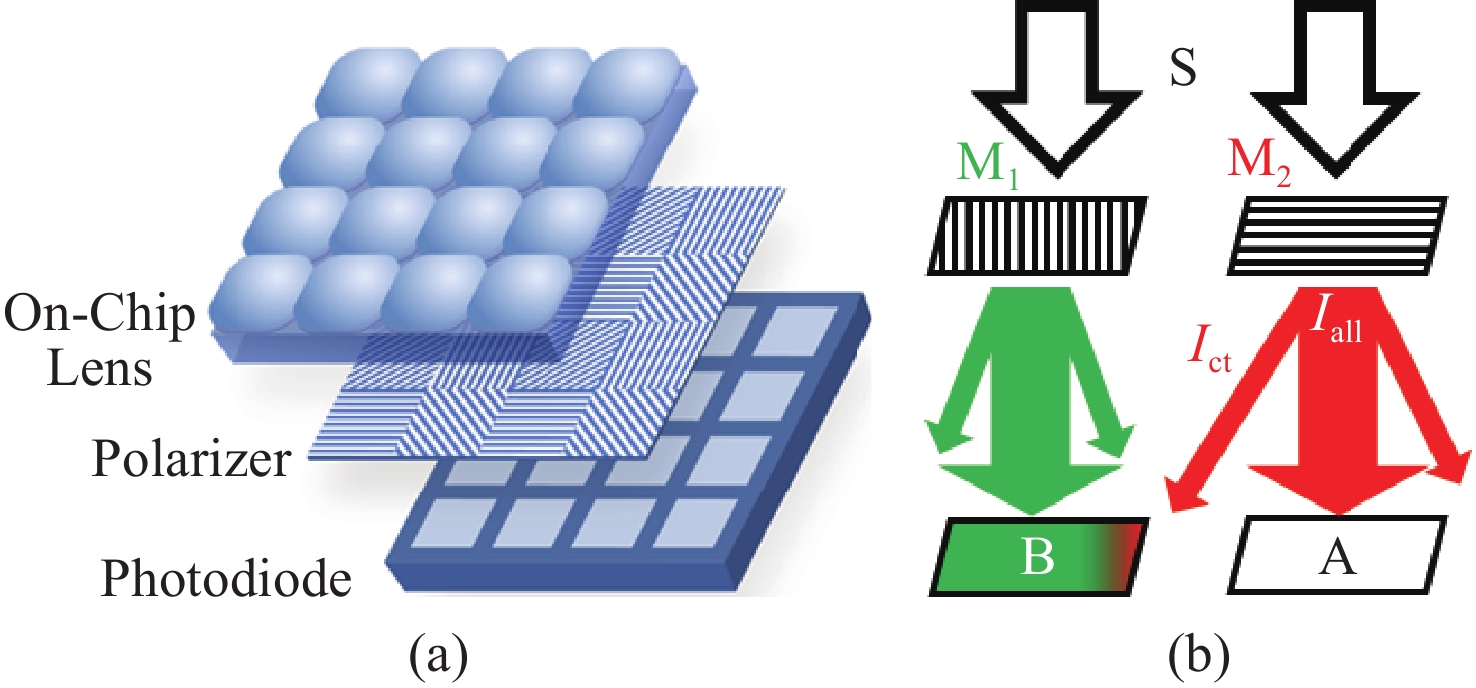
分焦平面偏振相机是一种应用广泛的集成化偏振成像系统,微偏振片阵列的像素间串扰是此类偏振成像系统特有的干扰因素,且串扰光强随入射光偏振特性的变化而改变,在目标偏振信息的测量时引入了误差。本文回顾了偏振串扰模型的发展历程,将相关研究中涉及到的影响串扰的全部因素进行了归纳。以感光芯片参数和光学系统参数为系统关键因素,讨论了相机应用过程中的串扰原因-结果模型以及与时间噪声的关系,分析了串扰导致的各像素检偏参数的变化结果,重点总结了串扰的因素相关性、实验可重复性、误差随机性和参数可标定性,并对串扰模型的未来发展趋势进行了展望。
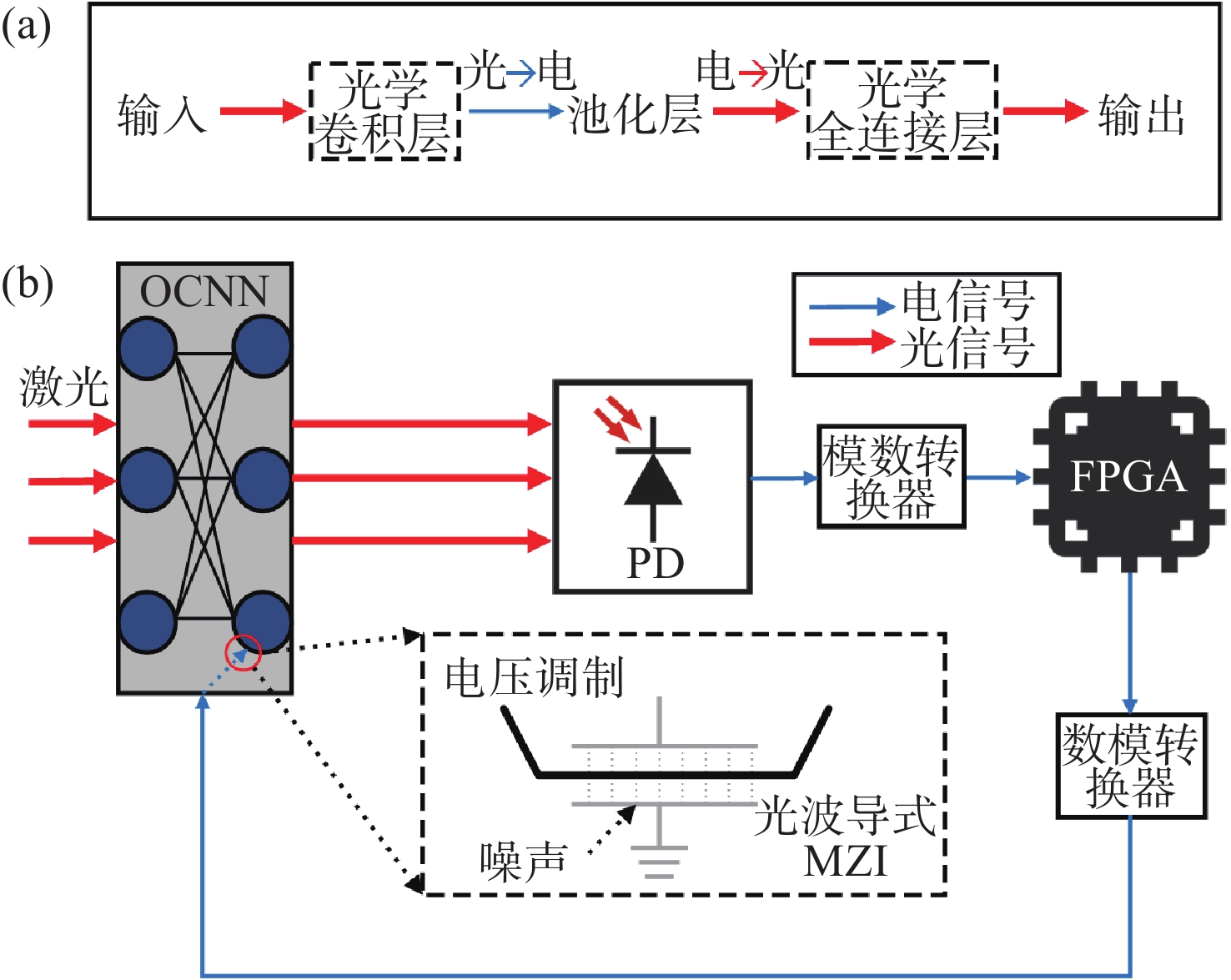
光电混合的光学卷积神经网络(OCNN)通过结合光子元件的并行线性计算能力和电子元件的非线性处理优势,在分类任务中展现了巨大的潜力。然而,光子元件的制备误差即不精确性和执行后向传播的FPGA中电路噪声显著影响了网络性能。本文搭建了光电混合的OCNN,其中的线性计算由基于马赫-曾德尔干涉仪的光学计算层完成,而池化计算及训练过程在FPGA中完成。本文着重研究了在FPGA上的片上训练方案,分析了噪声对片上训练效果的影响,并提出了增强OCNN抗噪能力的网络优化策略。具体地,通过调整池化方式和尺寸以增强OCNN的抗噪性能,并在池化层后引入Dropout正则化以进一步提升模型的识别准确率。实验结果表明,本文采用的片上训练方案能够有效修正光子元件的不精确性带来的误差,但电路噪声是限制OCNN性能的主要因素。此外,当电路噪声较大时,例如当电路噪声造成的MZI相位误差标准差为0.003,最大池化方式与Dropout正则化的结合可以显著提升OCNN的测试准确率(最高达78%)。本研究为实现OCNN的片上训练提供了重要的参考依据,同时为光电混合架构在高噪声环境下的实际应用探索提供了新的思路。
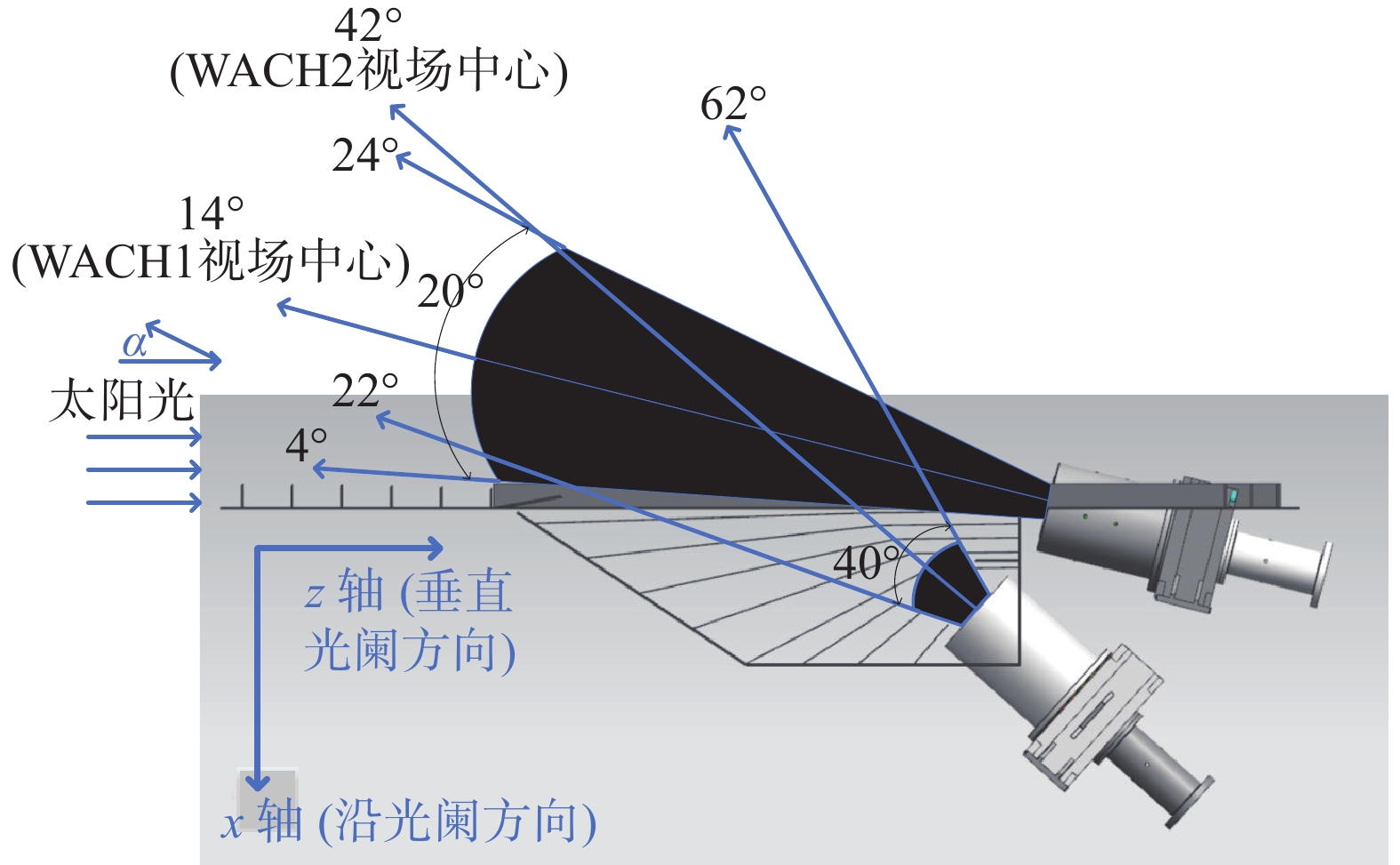
为了对日球成像仪太阳杂光抑制能力进行定量化评价,开展了日球成像仪太阳杂光抑制能力的测试方法研究和实验验证。提出了一种通过将前端光阑与相机进行分段测试,进而实现在实验室条件下测试日球成像仪太阳杂光抑制能力的方法,避免了真空测试环境下空间受限引起的结构散射误差对测试精度的影响问题。利用该方法在实验室条件下对一台日球成像仪太阳杂光抑制能力进行测试。测试结果表明:日球成像仪整机的PST在WACH1相机处为1.4×10−8,在WACH2处为4.3×10−9。对测试结果进行误差分析,其中随机误差为21.6%,系统误差导致WACH1处PST测试误差为1.1×10−8,在WACH2处为4.2×10−9,测试精度满足高杂光抑制比的日球成像仪测试要求,证明了该测试方法的可行性和准确性。本文研究为日球成像仪太阳杂光抑制能力测试提供了一种新的途径。

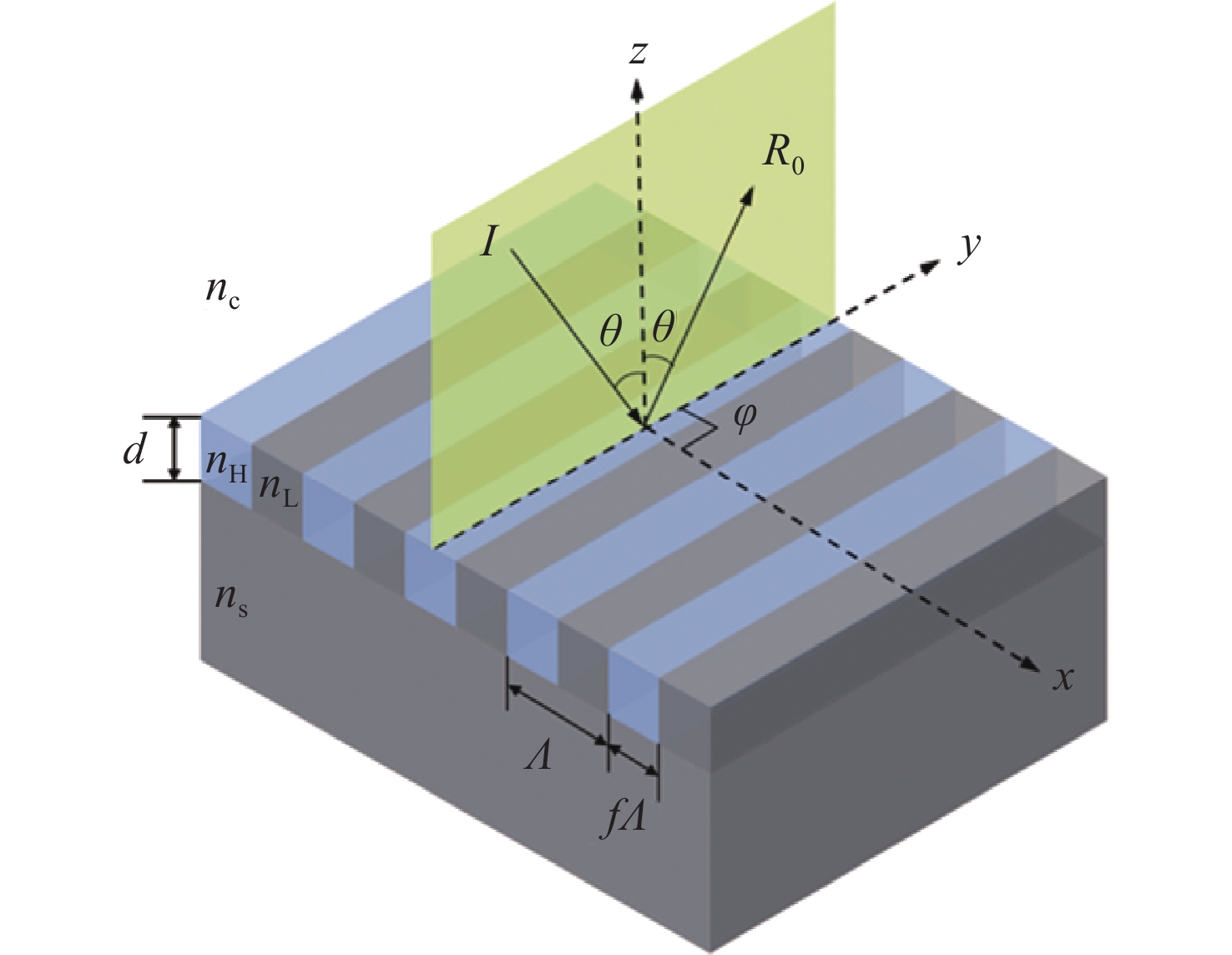
太赫兹分子指纹谱是一种非常有潜力的无标记检测方法可以对微量甚至痕量样品进行检测。然而太赫兹波的波长远远大于待测分子的尺寸,导致波与痕量物质之间的相互作用较为微弱,需要额外结构来增强样品对电磁波的吸收。本文在金属基底上构造了倒置的非对称介质光栅结构。该结构利用导模共振(Guided-mode resonance,GMR)和连续域束缚态(Bound state In Continuum,BIC)显著提升了薄膜样品的太赫兹吸收谱。该结构仅需测量反射吸收信号就可以得到薄膜增强吸收谱,而且样品涂覆于平坦的倒置的介质光栅背面,易于制备。当该结构用于0.2 μm厚的α-乳糖薄膜时,吸收谱幅度增强达到236倍。该结构为太赫兹波段痕量分析物的检测提供了一种新的方法。
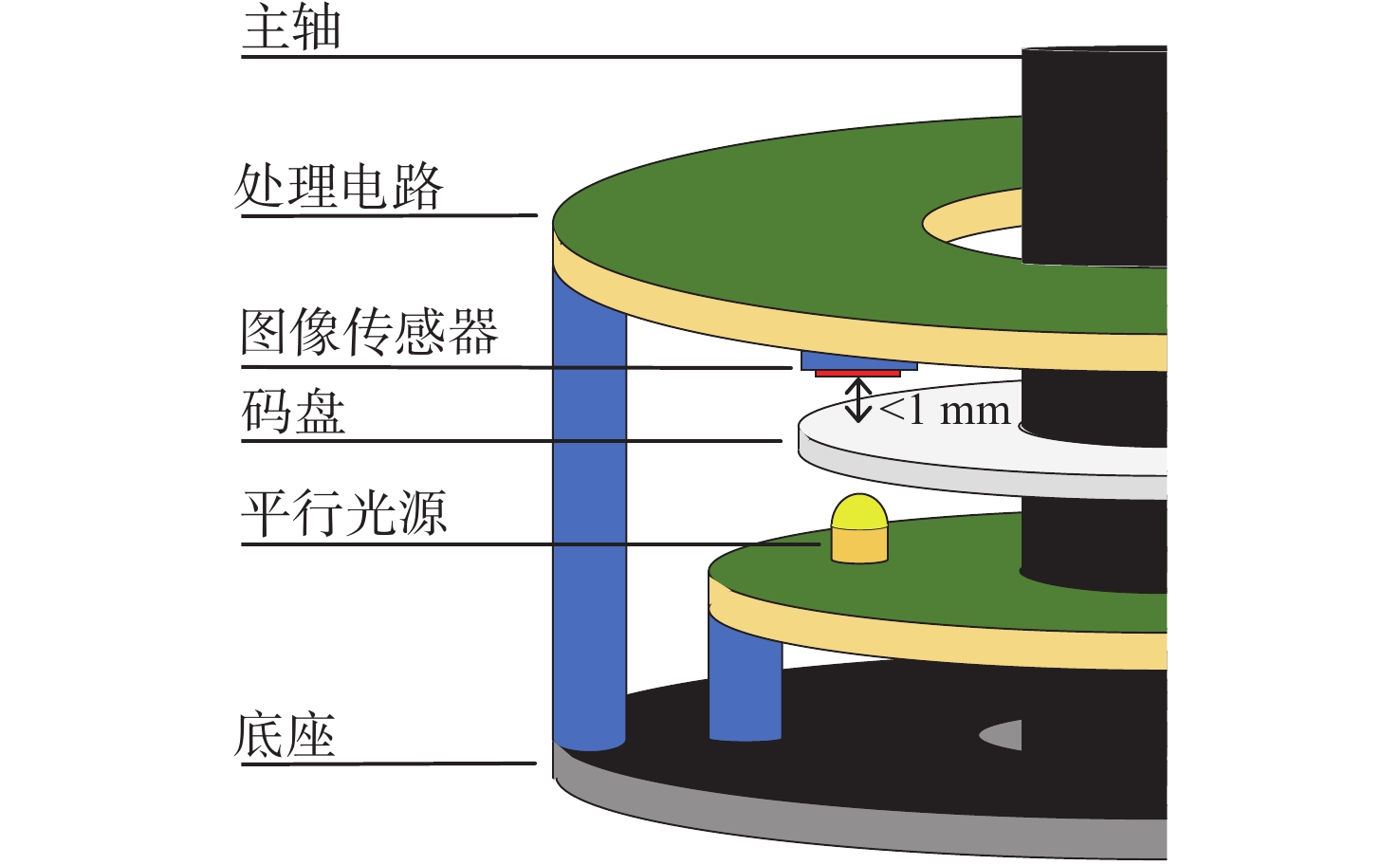
与传统光电位移测量技术相比,基于数字图像处理方法的位移测量技术具有更高的容错性、灵活性,成为当前的研究热点之一。为了实现高精度、高可靠性角位移测量,建立了基于曼彻斯特编码的图像式角位移测量系统。首先,以M序列伪随机编码为基础,采用曼彻斯特编码方式设计单码道光栅码盘,并采用数字图像传感器设计了光栅码盘上图案的获取光路。然后,基于所使用的编码图案,提出了译码识别算法。其次,为进一步提升位移测量的分辨力提出了边沿定位算法和编码标线边沿图案拟合的亚像素细分算法。最后,对所提出的方法进行实验验证。实验结果表明:在光栅码盘为100 mm时,实现21-bit的分辨力和1.73"的精度。本文研究结果为高可靠性、高性能光电角位移测量技术的研究奠定基础。

本文利用MACl后处理的方法来改善反溶剂获得的MA3Sb2I9钙钛矿薄膜的质量,促使MACl与钙钛矿薄膜之间出现Cl-Sb键相互作用,钝化了MA3Sb2I9薄膜表面的I−空位及晶界缺陷。该处理不仅能够有效改善薄膜的表面形貌和结晶性,而且降低了薄膜表面缺陷态密度,提高了载流子提取和传输效率。基于优化薄膜制备的自供电光电探测器件的灵敏度由3.89 × 107 Jones提升至5.72 × 108 Jones,提升了一个数量级;上升/下降时间也由37/76 ms降低到31/37 ms,器件的响应速度也得到了提升。
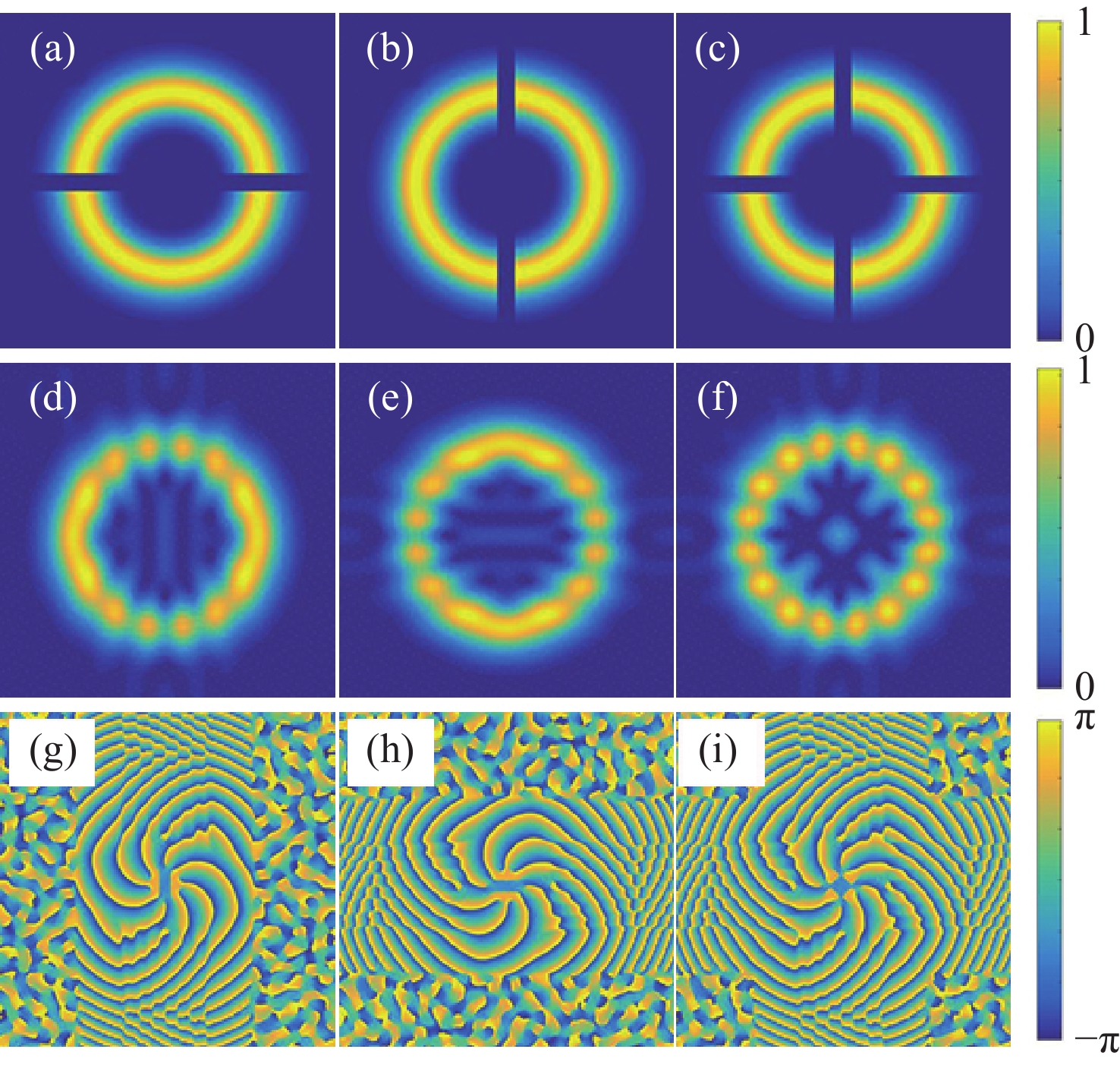
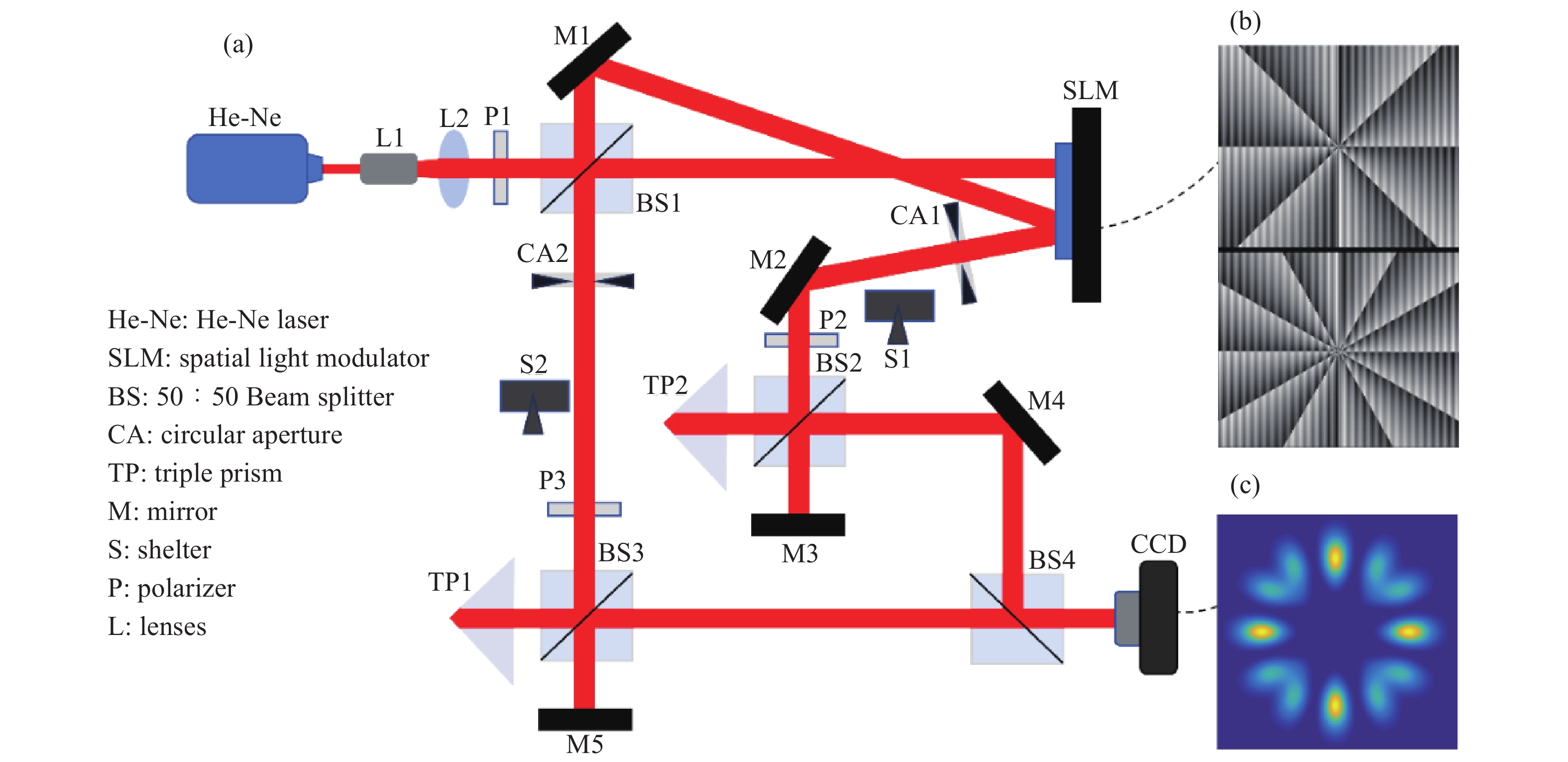
本文提出一种利用十字线衍射进行涡旋光束OAM检测的方法,其远场分布中与OAM相关的主亮斑包含了入射光束的大部分能量(50%~84%),且不存在干扰检测的次亮斑。相比之下,传统小孔衍射法中的主亮斑能量比例极低,尤其是7阶拓扑荷以上的远场主亮斑中只包含不到1%的入射光束能量,且拓扑荷级数越高,次亮斑的干扰性越强。因此,十字线测量法对弱涡旋光束的检测尤为适用,这对于远程的自由空间光通讯发展具有重要影响。

为了解决光子芯片垂直端面光波导桥接过程中,由于光子芯片表面遮挡激光束而引发的光波导形状缺陷问题,基于高数值孔径物镜聚焦光场分布,研究了激光焦点在光子芯片垂直端面不同
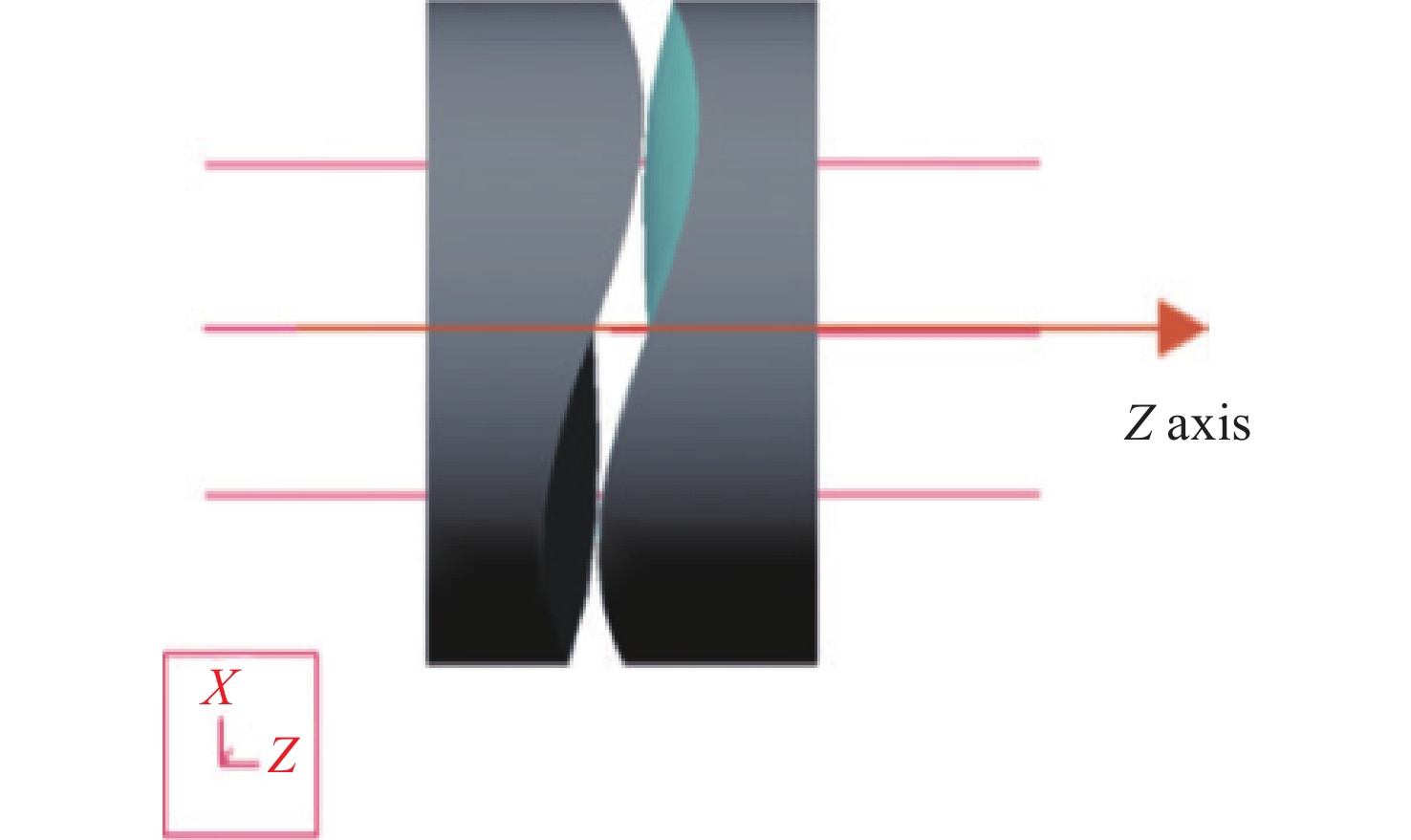
当前市面上的视觉训练产品大多采用电子屏幕显示远近大小交替变化的物体,通过观看屏幕刺激睫状肌,进行视功能训练,但该方法存在蓝光辐射,对人眼构成潜在危害。针对此问题,本文设计了一种基于Varifocal变焦结构的视光学系统。该系统通过控制两组垂直于光轴的镜片的横向移动实现光焦度连续变倍,模拟物体远近的变化,刺激睫状肌进行调节训练。本文首先分析了可变焦距透镜的面型限制,加入可变焦距球面效应方程优化Alvarez透镜基础面型,并采用Zemax软件进行设计。所设计的透镜面型由三阶XY多项式自由曲面表征,其中两组透镜最大相对垂轴偏移量为5.6 mm,实现屈光度在+4D—−8D的连续变倍。设计结果表明,全视场调制传递函数在奈奎斯特频率30 lp/mm处均大于0.3,均方根(RMS)半径值接近于艾里斑半径值,畸变均小于2%,该光学系统成像质量较好。
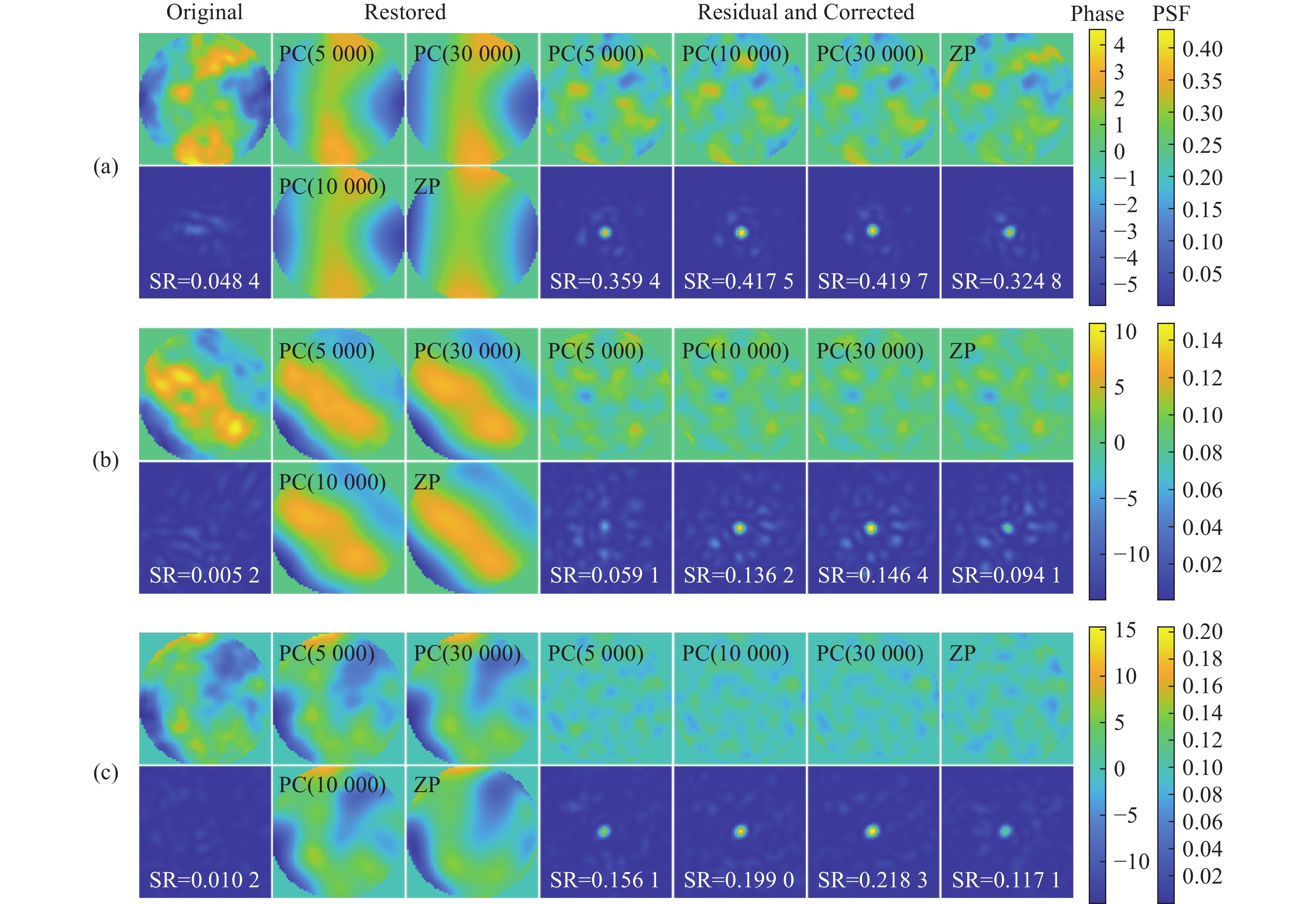
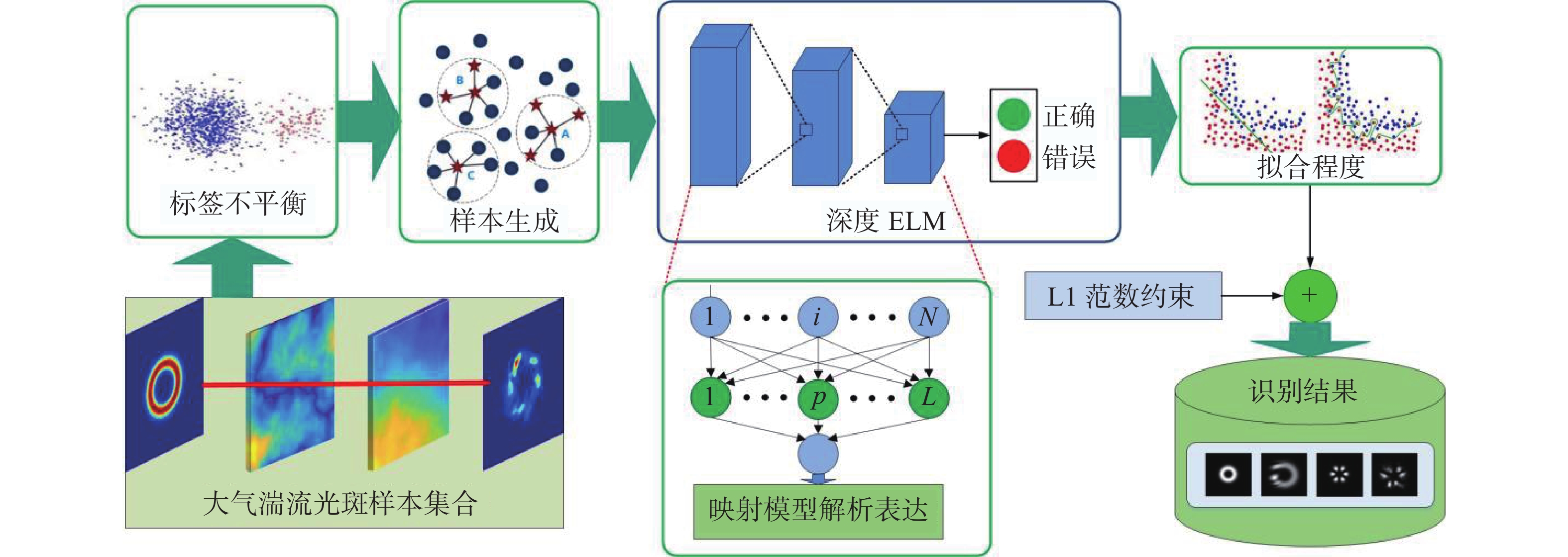
为了有效表征、还原大气湍流造成的相位畸变,解决传统Zernike多项式方法引起的相位还原高频信息不足问题,提出了基于主成分分析法的畸变相位特征表征、还原方法,对可能影响主成分精度从而影响还原效果的因素进行研究。首先建立了几组包含满足Von-Karman功率谱的畸变相位的原始数据集,几组数据集样本数量不等,并生成了
旋转式大气色散校正器(atmospheric dispersion corrector,ADC)在大口径天文望远镜的大气色散校正中得到了广泛应用。为得到旋转式ADC最佳优化设计方法、有效补偿色散并抑制由ADC引入的光轴偏移,本文基于传统的旋转式ADC大气色散补偿理论,建立了旋转式ADC光线路径的矢量模型,进而推导了色散补偿及光轴偏移矢量模型。基于该数学模型仿真分析了ADC不同参数对色散补偿效果、棱镜旋转角度及光轴偏移的影响。仿真结果表明:不同材料组合和不同胶合型式的旋转式ADC,在补偿相同的大气色散时,棱镜组对旋角度相差不大,其差值随天顶角的增加而增加;选择折射率在中心波长附近位置相同的材料,可以降低ADC出射光色散残差,提高色散补偿效果;ADC旋转补偿不同天顶角的大气色散时,系统光轴偏移角度随胶合面数量的增加而减小;每增加一个胶合面数量,光轴偏移角度可下降一个数量级。实际应用设计ADC时,可通过控制胶合数量及材料选取等方法有效补偿色散并抑制光轴偏移。
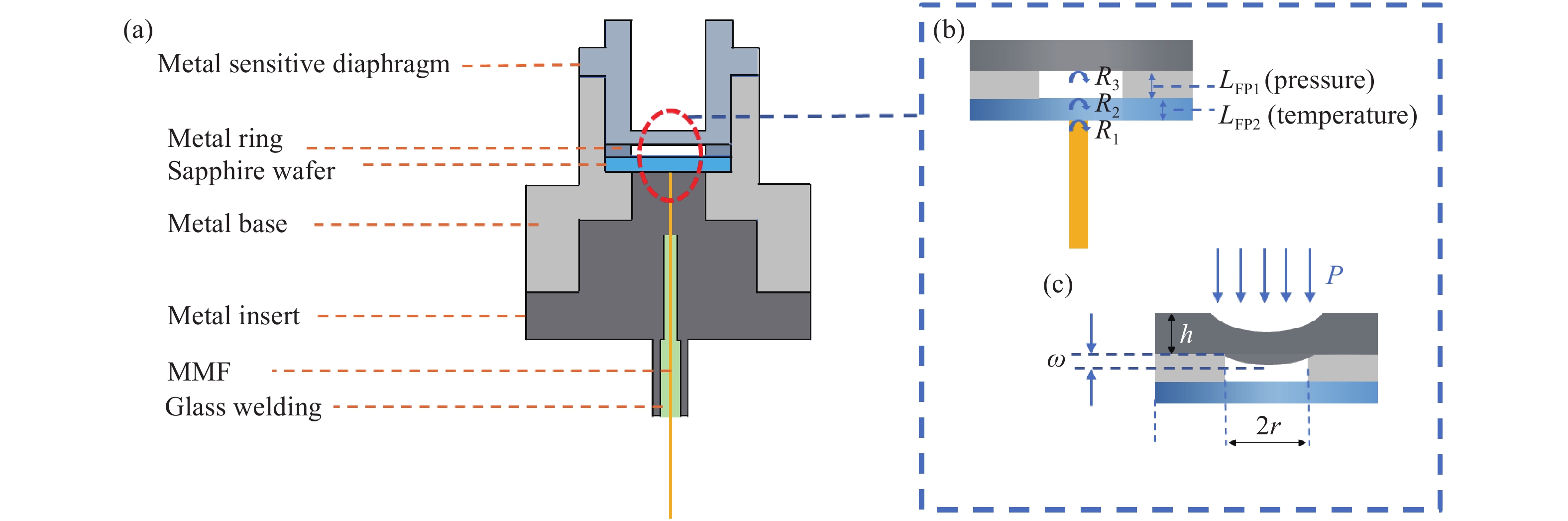
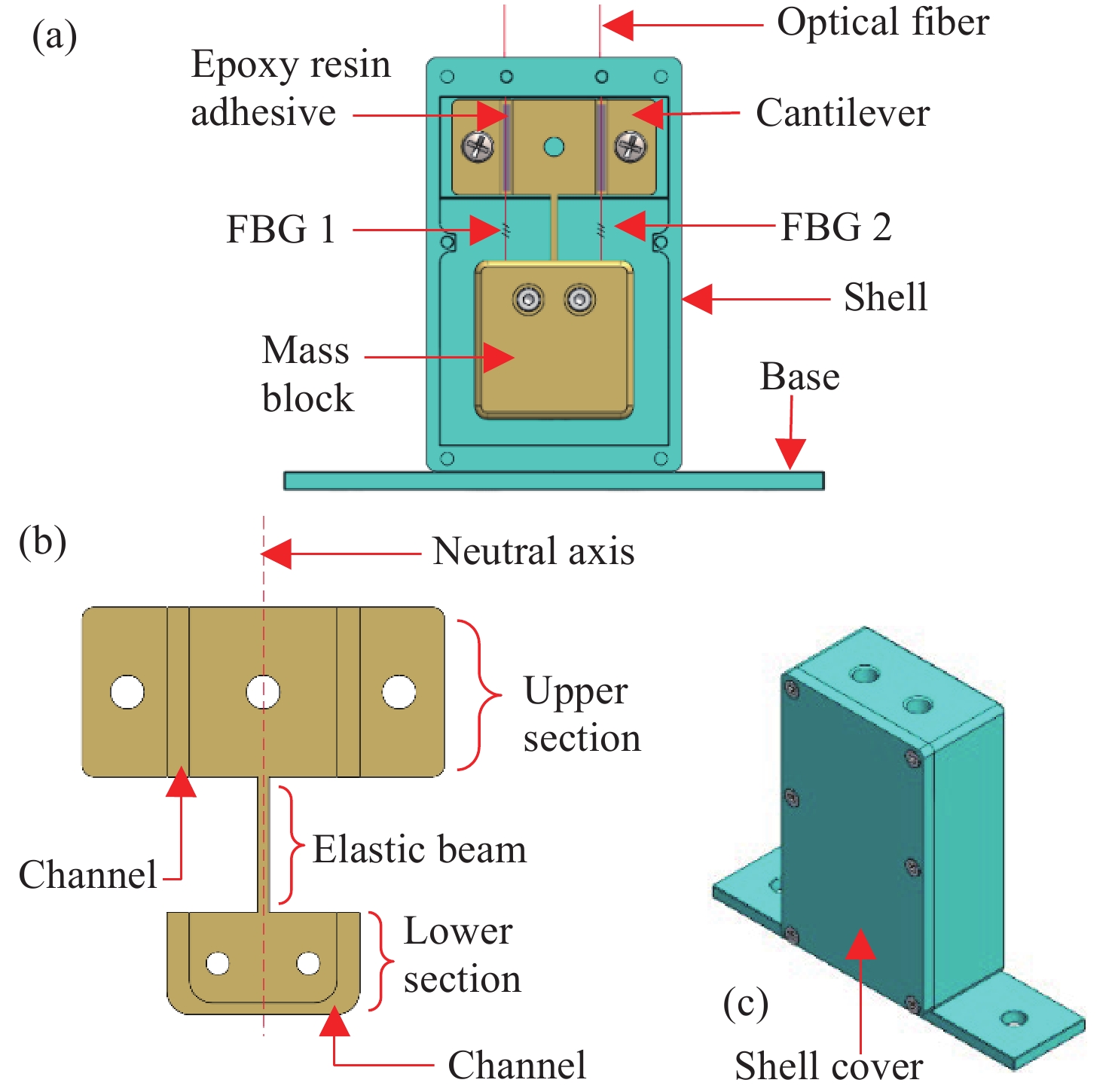
本文针对油气井、发动机燃油系统和航空液压系统等高温密闭环境下压力监测的技术难题,提出了一种基于温度补偿的金属膜片式光纤压力传感器。该传感器采用金属敏感膜片与蓝宝石晶片构成温度-压力双法珀(Fabry-Perot, FP)干涉腔结构,并结合互相关信号解调算法与温度解耦方法,有效降低温度串扰对压力测试的影响。实验结果表明,该传感器在常温和300 °C的压力测量中最大非线性误差为0.75% FS和0.99% FS。经过温度解耦后压力测量精度可达1.7% FS。该传感器具有良好的静态压力响应、稳定性和可靠性,为某些高温压力监测场景提供了一种有效的解决方案。
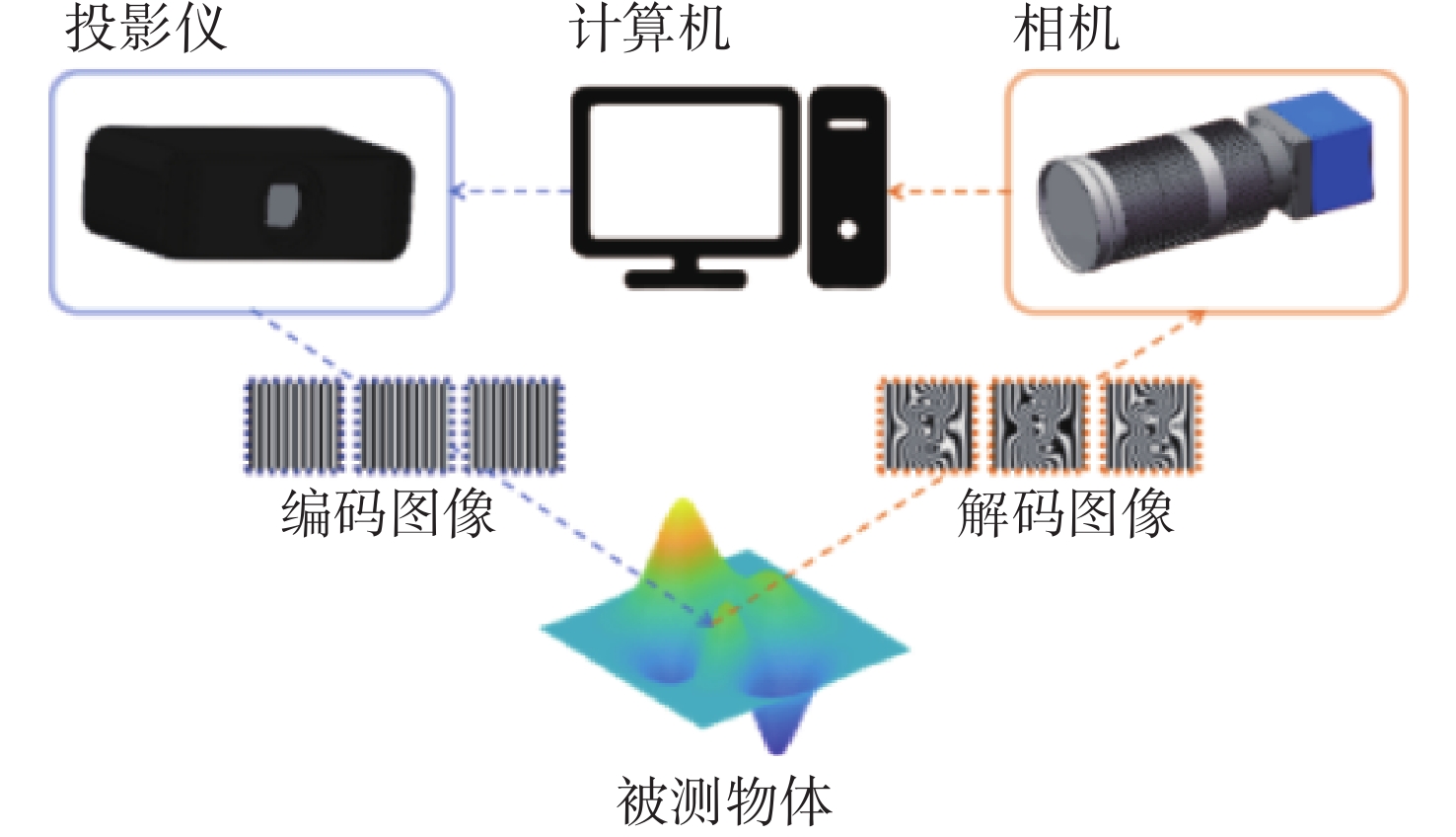
在结构光三维测量系统中,相机离焦现象不可避免。在离焦的影响下,物体表面的复杂纹理会引入显著的相位误差,影响测量精度。本文针对该问题,分析并构建了该相位误差的理论模型,指出了其与纹理变化方向的关系,并由此提出了一种基于双向条纹点云匹配的复杂纹理误差校正方法。理论上,通过投影横纵条纹图案获得的双向相位信息应解出完全一致的点云。基于这一原理,本文提出以最小化横纵点云对应点距离为目标,修正每个点对应的相位,最终得到校正后的点云。为了消除标定参数误差导致的点云整体偏移,本文通过点云匹配进行了预校正。对比实验的结果表明:对实际物体,相较传统方法,本文方法的平均绝对误差(MAE)和均方根误差(RMSE)最高可分别降低33.6%和39.1%。本文方法能够以更高的精度重建带有复杂纹理的物体。
作为量子领域的潜在能源供给系统,量子电池不可避免地经历由环境退相干诱导的提取功衰变过程。为了抑制能量耗散,本文提出了一种运动原子电池方案,其中原子所在的耗散腔与结构化环境发生耦合作用。本文通过开放量子系统方法,研究了量子电池最大提取功的动力学特性。我们发现,在非马尔可夫环境中,量子电池提取功的衰减显著减缓。相比于静止状态,当量子电池处于运动状态时,量子电池的存储性能得到了提升。这种能量保存效应在较高运动速度下更加显著。当环境记忆效应与运动控制同时作用时,两者有助于延长量子电池的放电寿命。此外,我们还研究了环境温度、随机噪声以及量子纠缠的影响。这些结论为开放量子电池提供了一种可行方案。

衍射光波导因其轻薄的外形、大视场角和大的眼动范围,成为实现增强现实(Augmented reality, AR)近眼显示技术最有前景的方案之一。目前商业化AR光波导仿真软件大多由国外公司开发,未见到有国产3D可视化的光波导仿真设计软件报道。据我们所知,本文工作为国内首款自主研发的基于光线场追迹的3D可视化光波导设计仿真模块。并应用该仿真模块设计了一款二维出瞳扩展的衍射光波导,展示了从光栅的

为了实现动态物体的三维轮廓测量,并克服传统傅里叶解调方法中由于不同载频频谱混叠而导致的测量精度的限制,以及彩色复合条纹投影技术中的颜色耦合问题,本文提出了一种基于快速迭代滤波的三频彩色条纹投影轮廓术。该方法首先通过CCD相机采集一帧彩色图像,其中
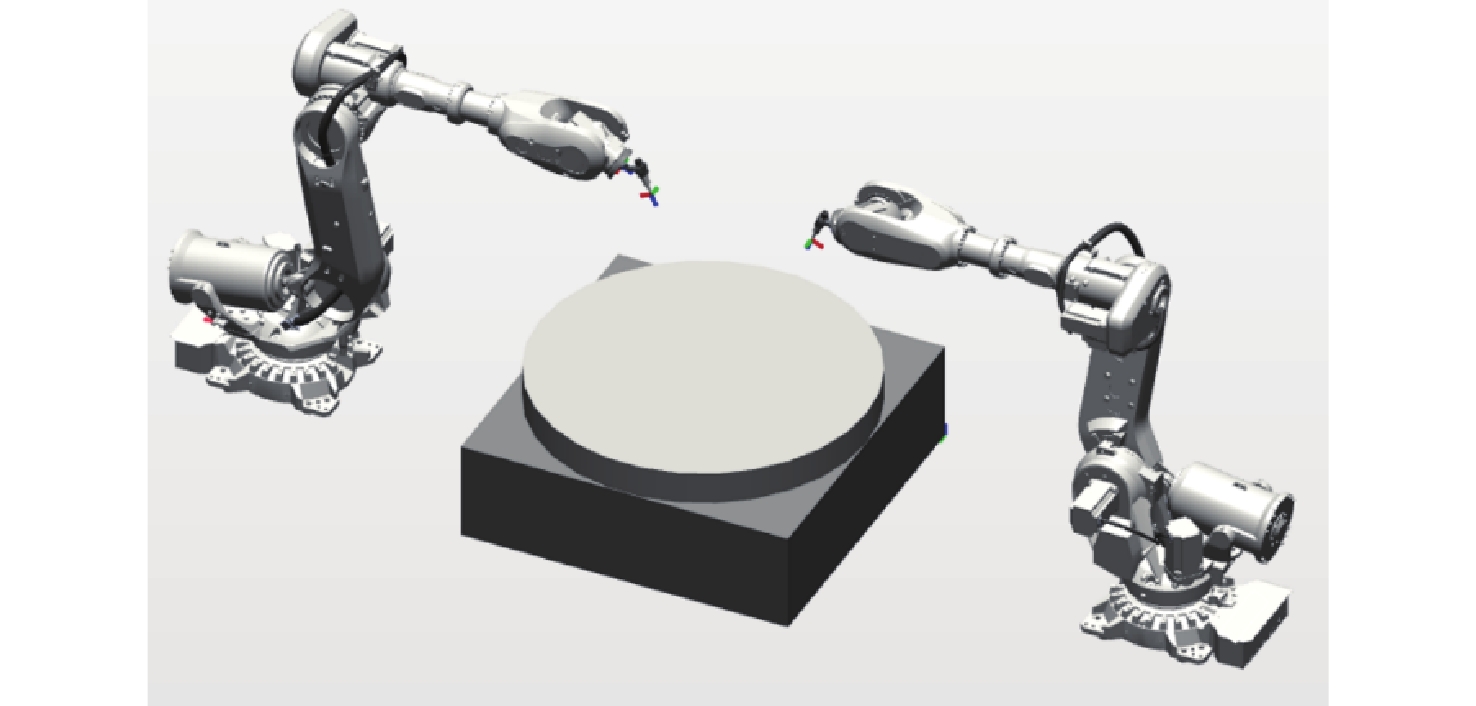
为了提升大口径光学元件的加工效率,提出了采用多个加工单元分别同时负载单个工具并共同执行加工任务,以降低加工单元执行时间从而大幅提升加工效率方法。首先,根据光学元件提出一种多机器人协同加工布局,接着,针对三种潜在的可行轨迹进行了模拟加工。然后,在离散仿真基础上,得出了轨迹参数的选取原则,针对离散仿真无法体现轨迹连续性对面形影响这一局限提出并建立了运动模式适配的积分去除函数模型,此模型将轨迹连续性的影响引入模拟加工中,最后提出一种协同加工避障策略并采用最优轨迹进行了协同加工的效率提升验证实验。实验结果表明:将初始面形PV=18.310λ(λ=632.8 nm),RMS为1.788λ的元件收敛至PV=4.873λ,RMS=1.113λ,与此同时其直径120 mm的有效区间内PV=4.661λ,RMS=0.857λ,经加工后收敛至PV=2.465λ,RMS=0.622λ。总执行时间为3.943h,若采用协同加工策略单个加工单元最长执行时间为2.041h,相比单工具效率提升1.93倍。与单机器人加工相比,该方法使得加工效率显著提高,面形精度得到保证,有效缩短了加工周期,在大孔径光学元件制造中具有很强的适用性和潜力,同时也为未来使用更多机器人的协同光学制造提供了轨迹规划策略参考和奠定了基础。
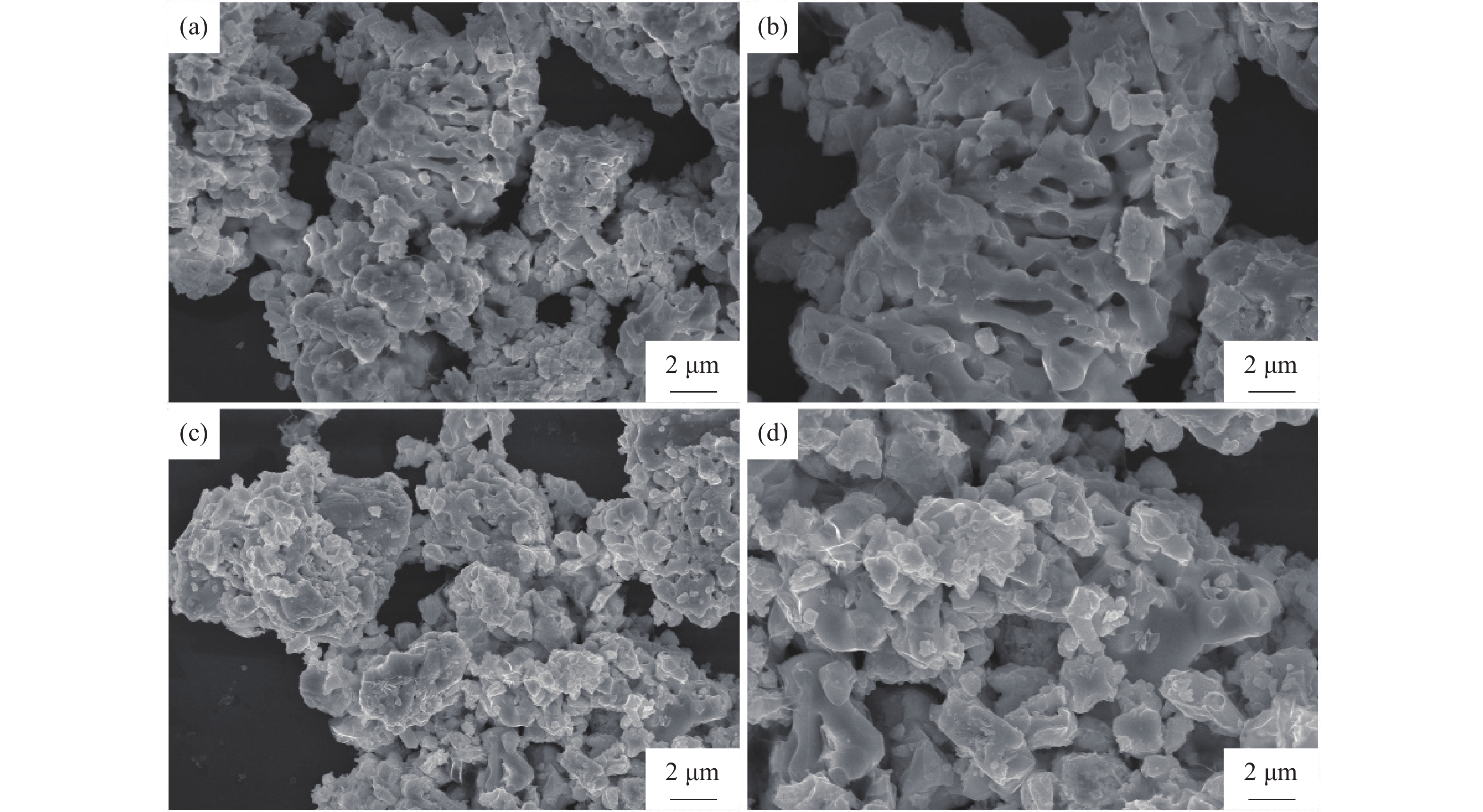
采用热聚法结合室温溶液法制备了Bi2O3/Bi2S3异质结复合材料,并对其微观形貌、晶体结构和元素组成等进行了表征。结果表明Bi2O3/Bi2S3异质结复合材料整体呈现为块状形貌且有孔洞存在,表面相对粗糙。基于所制备的Bi2O3/Bi2S3异质结复合材料,构筑了光电探测器。在无外加偏压条件下,Bi2O3/Bi2S3探测器暴露在紫外光下的最大光电流(0.32 μA)和响应速度(65.65/80.56 ms)相比Bi2O3探测器均得到了明显增强。此外,该器件可将Bi2O3的探测波段从紫外拓宽至可见光,并且在可见光波段也具有快速稳定的自驱动探测能力。这主要是由于Bi2O3和窄带隙Bi2S3半导体成功耦合,形成了II型能带结构的异质结复合材料。值得注意的是,连续开/关蓝光100次的光电探测性能测试结果表明,Bi2O3/Bi2S3探测器具有良好的循环稳定性。

采用折叠离轴三反望远镜作为共光路组件,设计了一种适合于新型机载多光谱共口径瞄准吊舱的光学系统。该光学系统具有小型化、高透过率、多光谱、长焦距、装调难度低等特点。所设计的多光谱共口径光学系统,光学有效口径为220 mm、近红外焦距为
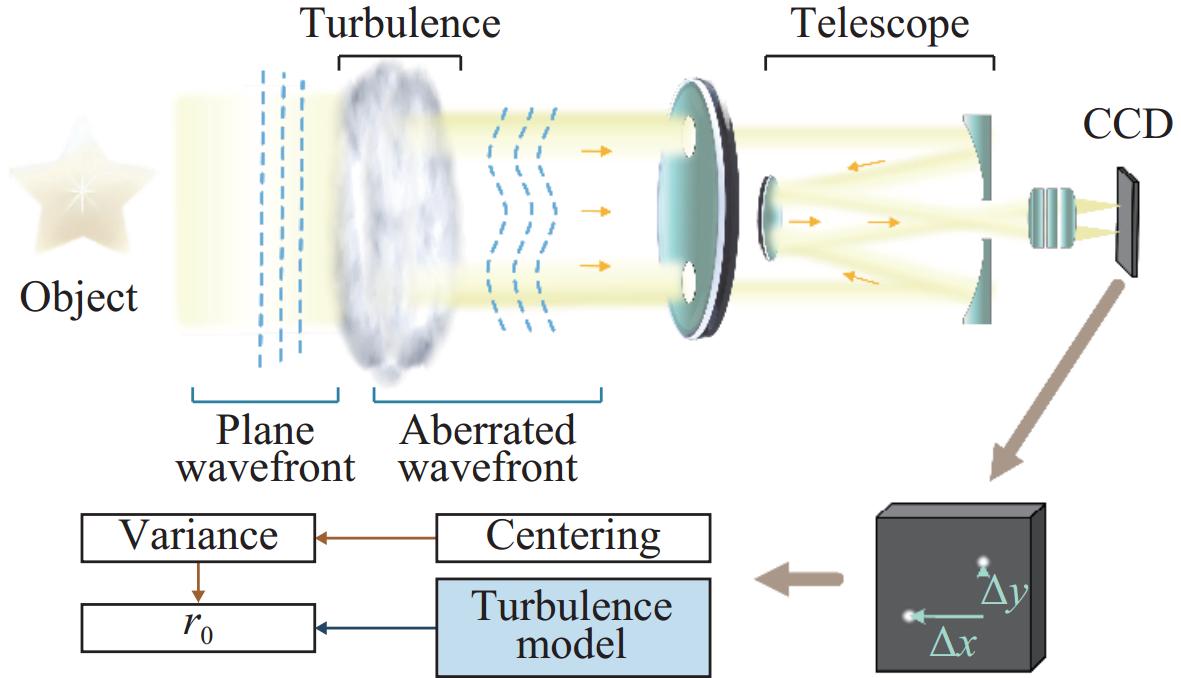
为测量大气相干长度这一表征大气湍流对自由空间光通信链路性能影响的重要指标,本文提出了一种将扩展目标作为信息源的新策略,即结合波前结构函数法与扩展目标偏移量算法直接对大气相干长度进行估计。现有的差分像运动监测器等方法通常依赖于导星目标,但在水平通信链路中难以设置合适的导星目标,其实际应用效果受到显著限制。因此,将扩展目标作为直接测量的信息源,为大气相干长度测量提供了一种可行的解决方案。本文首先回顾了现有主流算法的原理及研究现状,分析了现有算法对导星目标的依赖性及其在水平链路应用中的局限性。在此基础上,提出一种将改进归一化互相关算法与波前结构函数法相结合的测量方案,用于扩展目标场景估计大气相干长度。与传统测量方法相比,该方法能够在水平链路基于扩展目标条件下有效开展测量,同时显著减少了系统的复杂度和设备成本。为验证所提方法的有效性与测量精度,本文设计开展了仿真与实验研究。结果表明,该方法测得相干长度值与差分像运动监测器法及波前相位方差法高度一致,测量精度误差约为4%。这一结果证明了该方法在大气相干长度评估中的有效性,可为提升自由空间激光通信的可靠性提供有效参考。
为了实现空间目标的广域探测,本文设计并研制了一种宽光谱(400 nm−
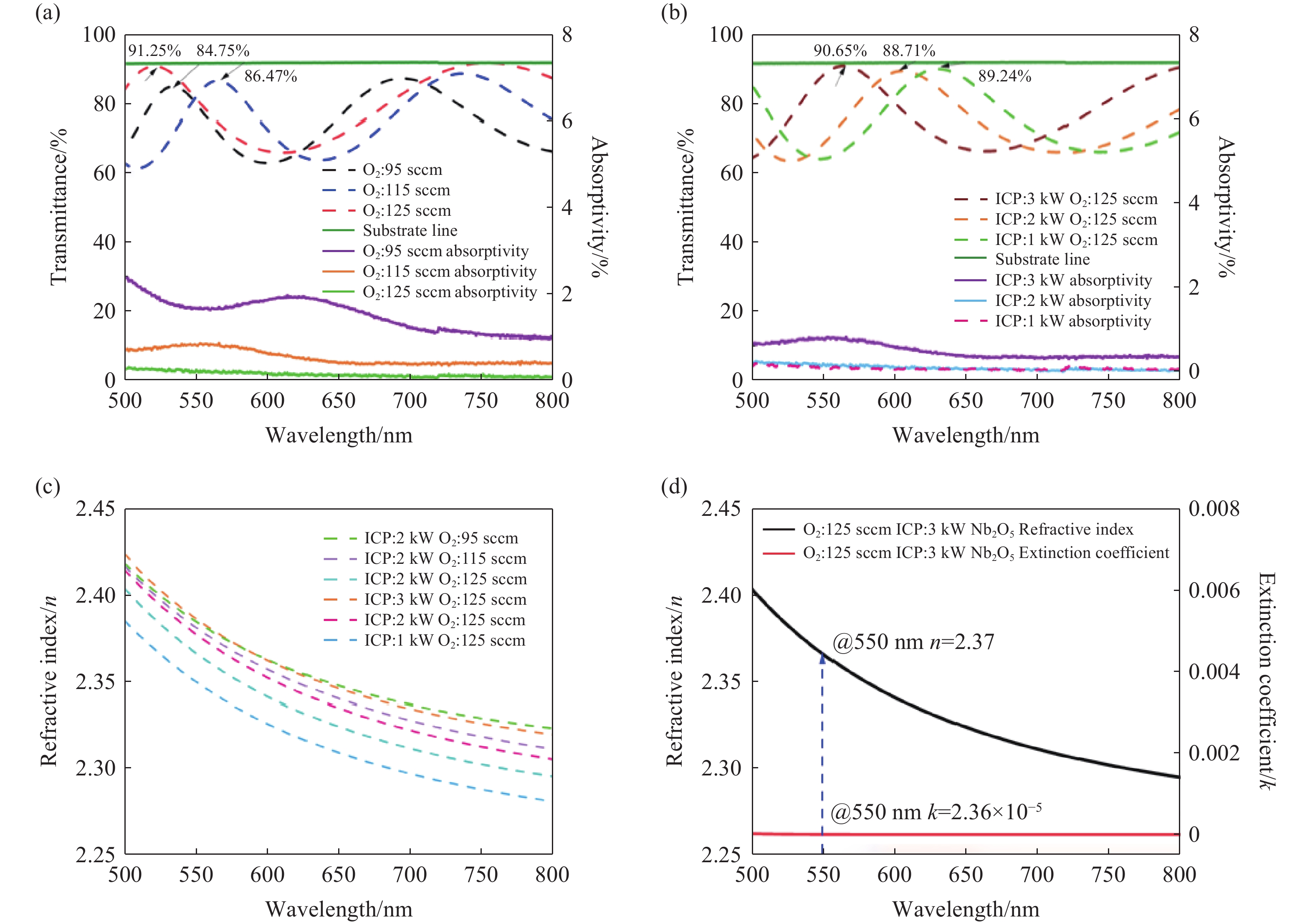
随着生物荧光技术的迅速发展,对信号传输的精度要求也越来越高。滤光膜作为系统分光的核心器件,其光谱特性直接影响系统的传输精度。本文选用Nb2O5与SiO2作为高低折射率材料,利用高斯变迹函数结合Optilayer膜系软件对多通道负滤光膜进行膜系优化设计。采用电感耦合磁控溅射沉积技术,在D263T基板上研制多通道负滤光膜。通过对膜层敏感度反演分析,解决了膜厚控制误差影响光谱偏移及通带透过率降低的问题。研究了工艺参数对膜层粗糙度的影响因素,通过调节ICP功率有效改善膜层表面粗糙度。所研制的多通道负滤光膜45°入射时,中心波长576 nm、639 nm、690 nm反射带半宽度分别为5 nm、6 nm和7 nm,平均反射率约为98%。透射区545~562 nm,597~624 nm,655~675 nm和708~755 nm,平均透射率达到92%。多通道负滤光膜通过耐环境测试与光谱稳定性测试,满足生物荧光系统中多通道负滤光膜的使用要求。
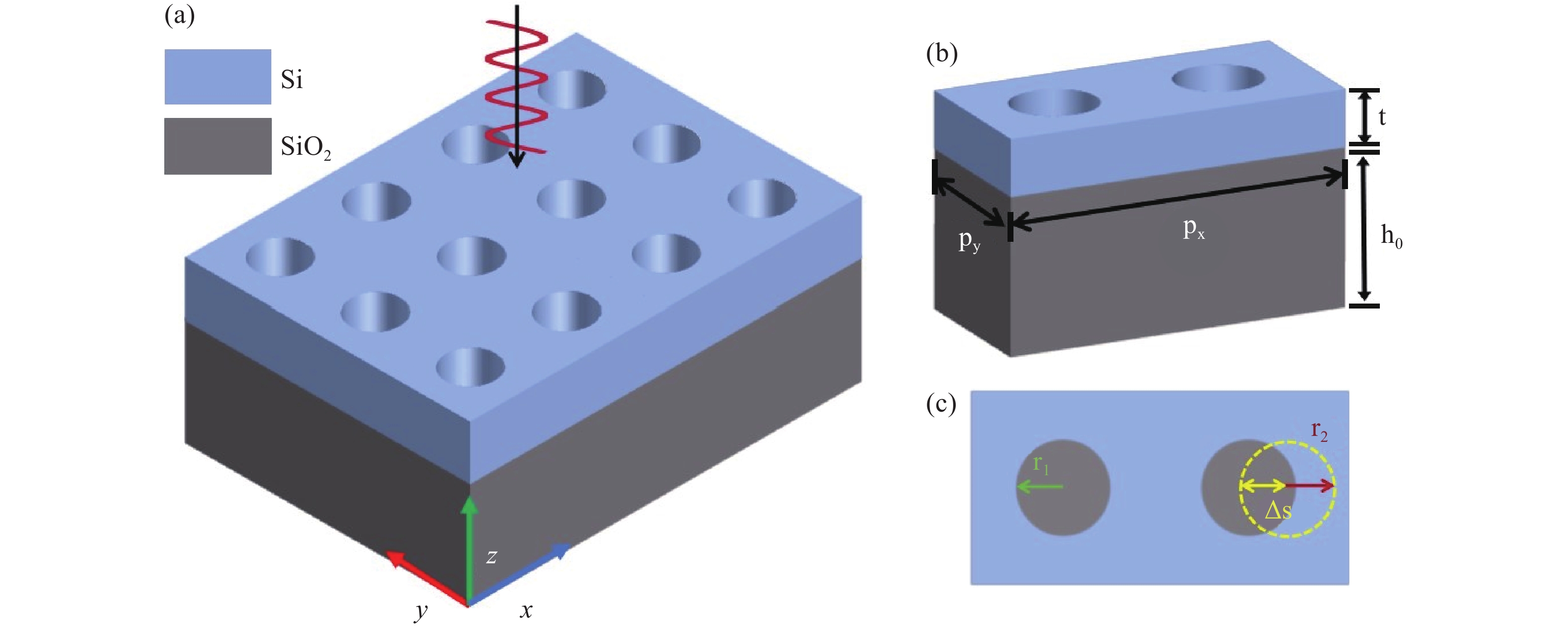
相比传统的单频连续域束缚态(BIC),双带BIC具有更高的自由度和功能性。因此,实现双带BIC的独立调控将进一步增强其优势,最大化其性能。本研究设计了一种在太赫兹(THz)波段实现双带BIC的全介质超表面。通过调节两种不对称结构参数,可以实现对两个对称保护BIC的独立控制。此外,通过改变硅孔形状,验证了该设计对几何形状具有较强的鲁棒性。最后,测试结果表明,两个BIC的优值(FOM)均可达到109。本研究为双频BIC的实现与调谐提供了一种新的方法,并为多模激光器、非线性光学、多通道滤波及光传感等领域的应用提供了更多可能性。
条纹投影技术在三维测量和表面形貌重建中得到广泛应用,其相位质量是决定测量精度的关键因素。然而,输入光强和输出光强之间的非线性效应是导致相位误差的主要来源之一。为了解决这一问题,本文提出了一种新的系统非线性主动校正方法。该方法首先通过对标准平面投影少量的均匀灰度图像,获取输入光强与输出光强的变化规律。然后,将这一规律与系统非线性主动校正结合,建立了基于输入输出光强变化的系统非线性模型。利用遗传算法求解最优编码值,从而通过条纹编码主动校正了投影条纹。校正后的条纹有效减少了非线性效应带来的影响,大幅提升了相位获取的质量。为了验证所提方法的有效性,以三步相移为例进行了计算机仿真。结果表明,标准误差降低了88%,最大误差减少了85.5%。在实际标准平面实验中,校正后标准相位误差由
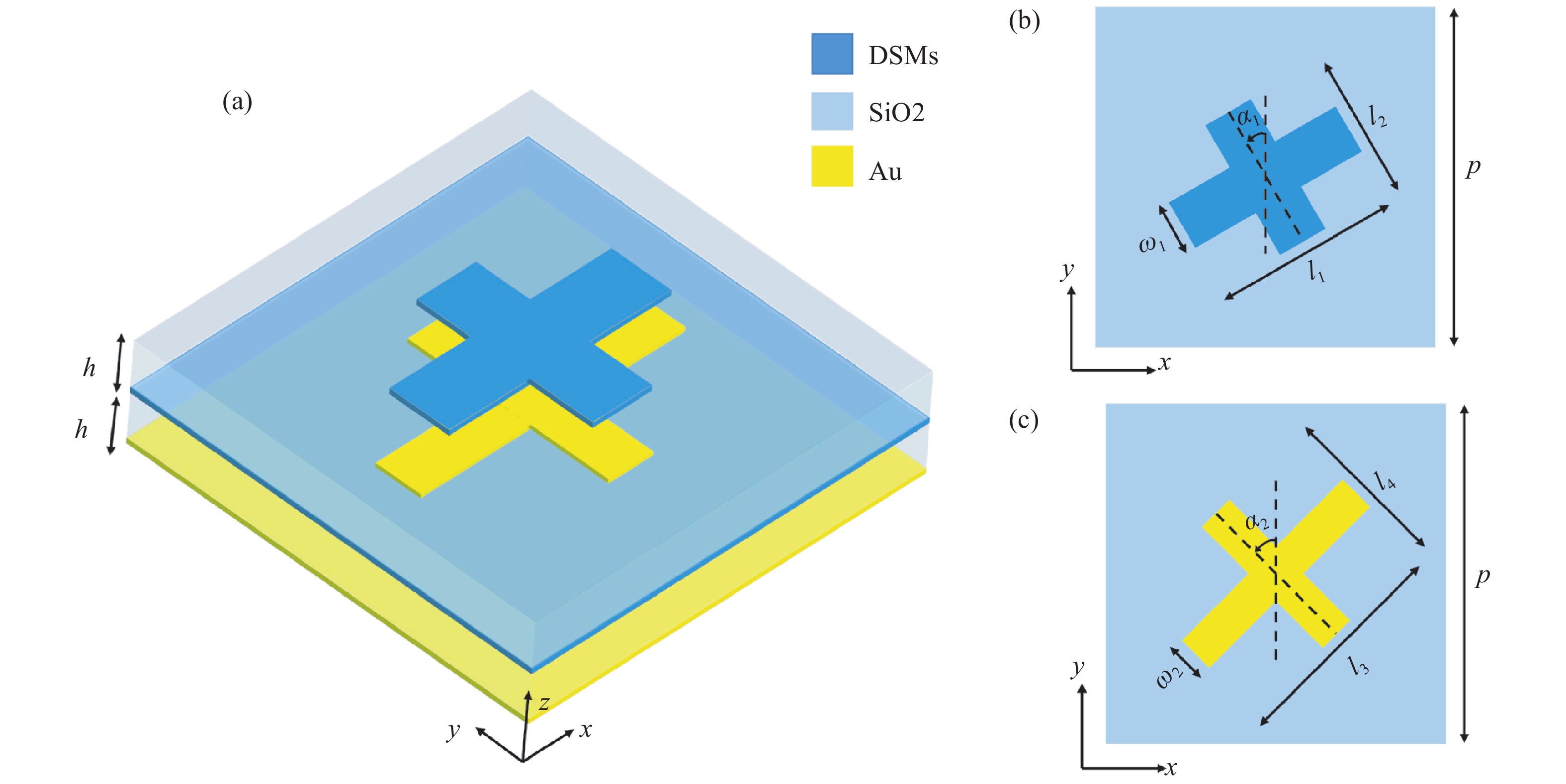
具有较高信息容量的多功能超表面受到研究者的广泛关注。本文提出了一种基于太赫兹波段的2位可调谐解耦编码超表面,利用狄拉克半金属(DSM)的可调谐特性设计了一种新的多层结构,在超表面结构中引入几何相位和传播相位,可以有效地调控电磁波。当DSM的费米能级为6 mev时,电磁波由DSM贴片控制,在1.3 THz这一频点工作,当费米能级为80 mev时,电磁波由嵌在DSM薄膜上的金贴片控制,在1.4 THz这一频点工作,这两种模式都可以在左旋圆极化(LCP)波和右旋圆极化(RCP)波激励下实现轨道角动量(OAM)模式不同的涡旋波束的独立控制。这项工作为提高信息容量和无线通信中极化复用技术带来巨大潜力。
针对高功率轴快流CO2激光器射频放电阻抗匹配问题,本文设计了低反射率、高动态匹配范围的阻抗匹配网络,实现了射频激励轴快流CO2激光器在不同放电结构下的射频功率高效利用。基于射频电路阻抗匹配理论,构建了多电极等效电路模型,提出向匹配网络中引入可调高压陶瓷电容的方法,设计了适用于高功率射频激励轴快流CO2激光器的动态L型匹配网络。模拟的动态L型匹配网络可实现向16根放电管注入60 kW射频功率,在总负载阻抗12.81 Ω~49.94 Ω的范围内实现反射率小于1%;并搭建了单管射频放电实验装置,实验测得动态L型匹配网络在4 kW注入功率下反射率小于1%,与仿真结果相符。证明了引入可调高压陶瓷电容的动态L型匹配网络能够实现高动态范围内的阻抗匹配,基本满足高功率射频激励轴快流CO2激光器匹配电路设计要求。
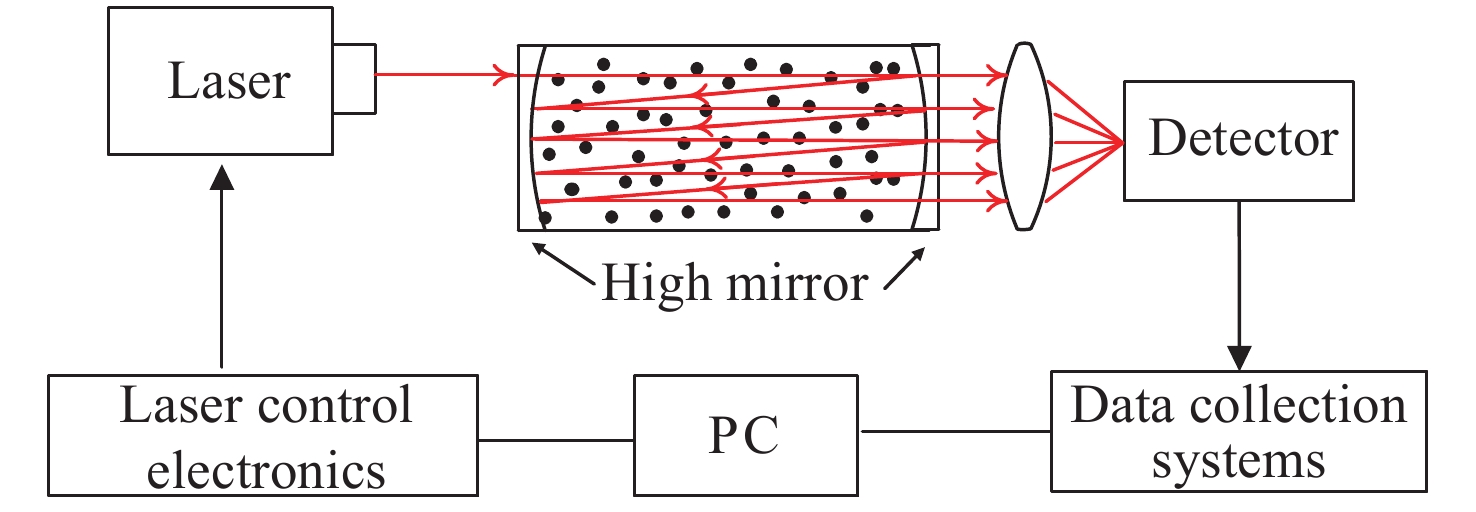
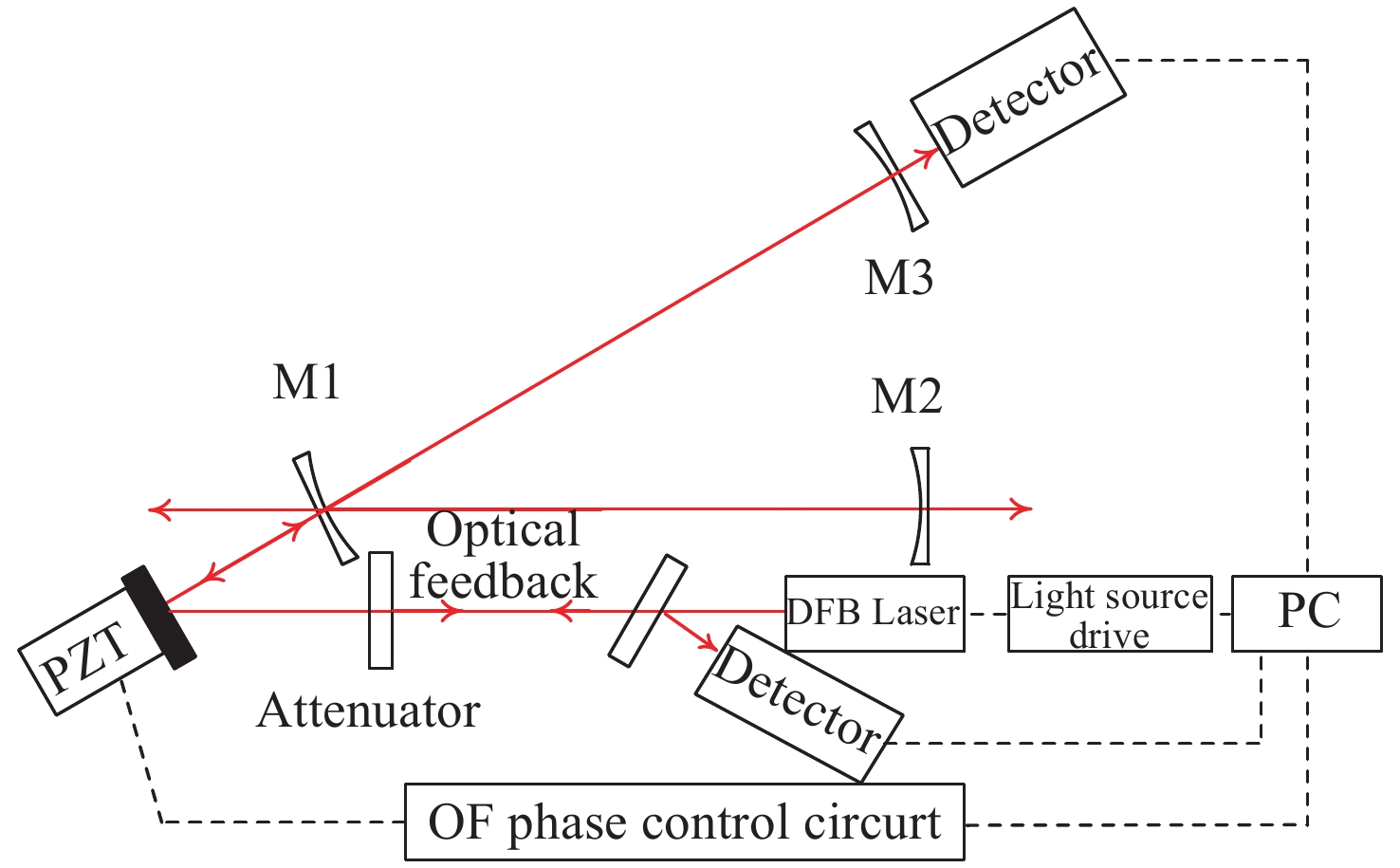
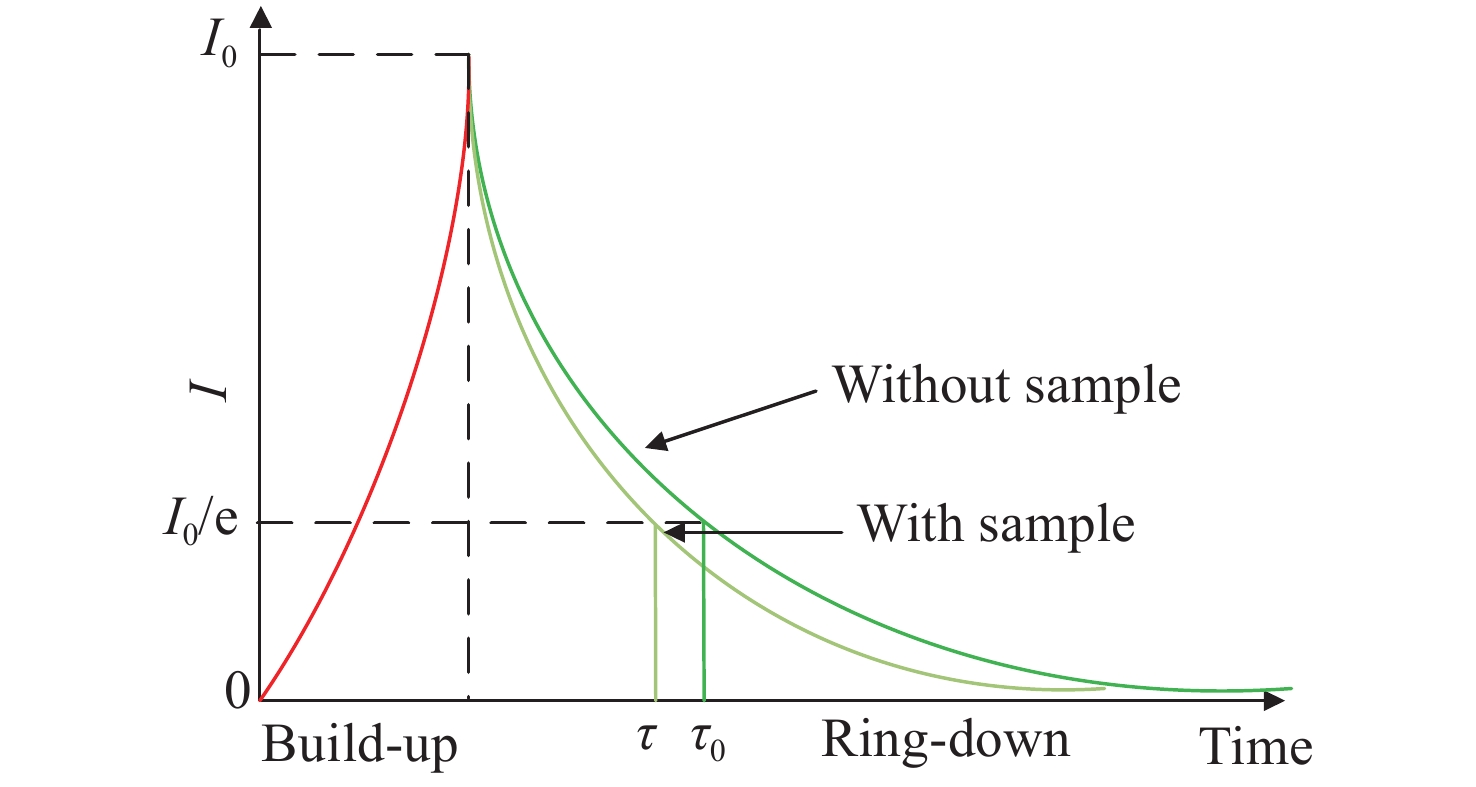
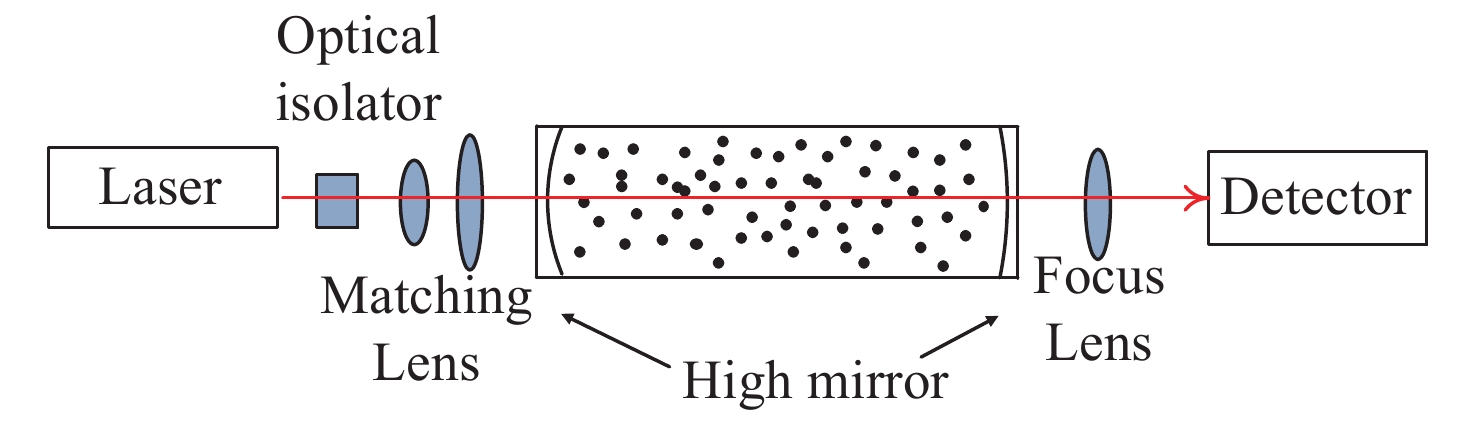
腔衰荡光谱仪器(CRDS)中腔镜微缺陷会导致测量精度下降。本文建立了基于Bobbert Vlieger BRDF 理论的腔镜微缺陷散射模型,分析了微缺陷在不同光源波长、入射角度、缺陷量级、缺陷类型、缺陷密度、基底膜层的散射光特性。腔镜微缺陷散射模型研究表明:微米至亚微米(100 μm~0.1 μm)量级缺陷会降低衰荡吸收精度;针对该量级微缺陷的检测,构建了腔镜微缺陷散射和微缺陷暗场检测的分析模型。CRDS腔镜微缺陷散射光模型的建立与分析,是实现腔镜微缺陷高精度检测和CRDS测量精度恢复的关键技术。
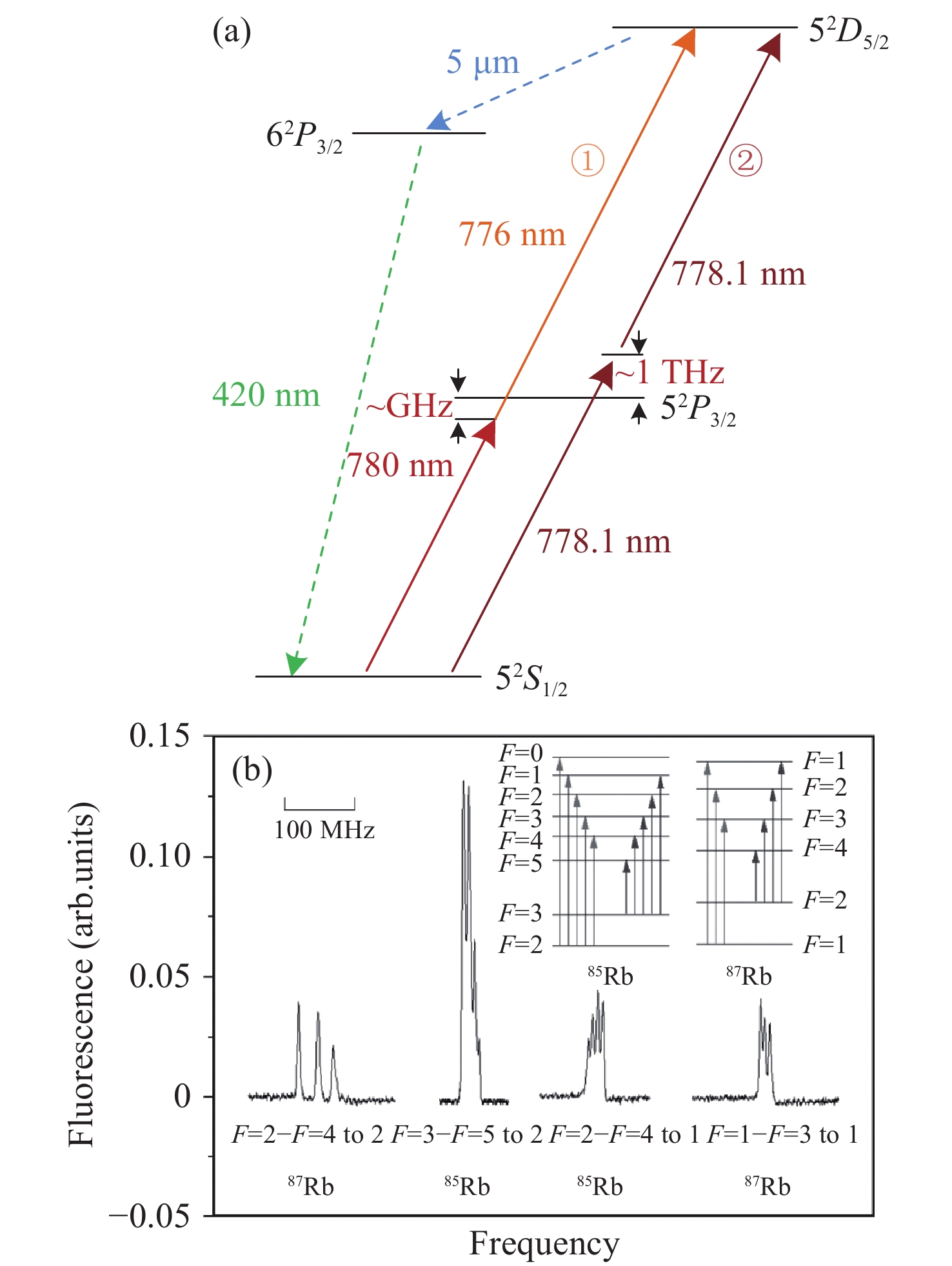
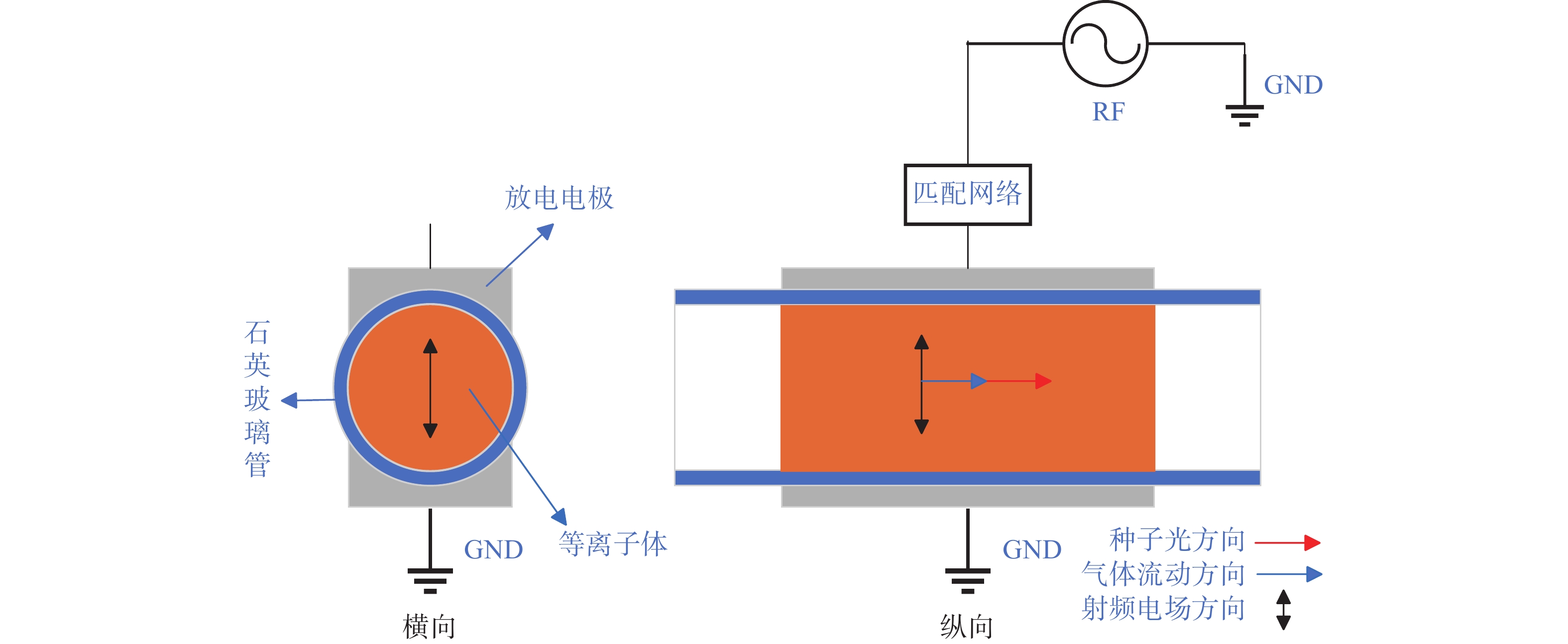
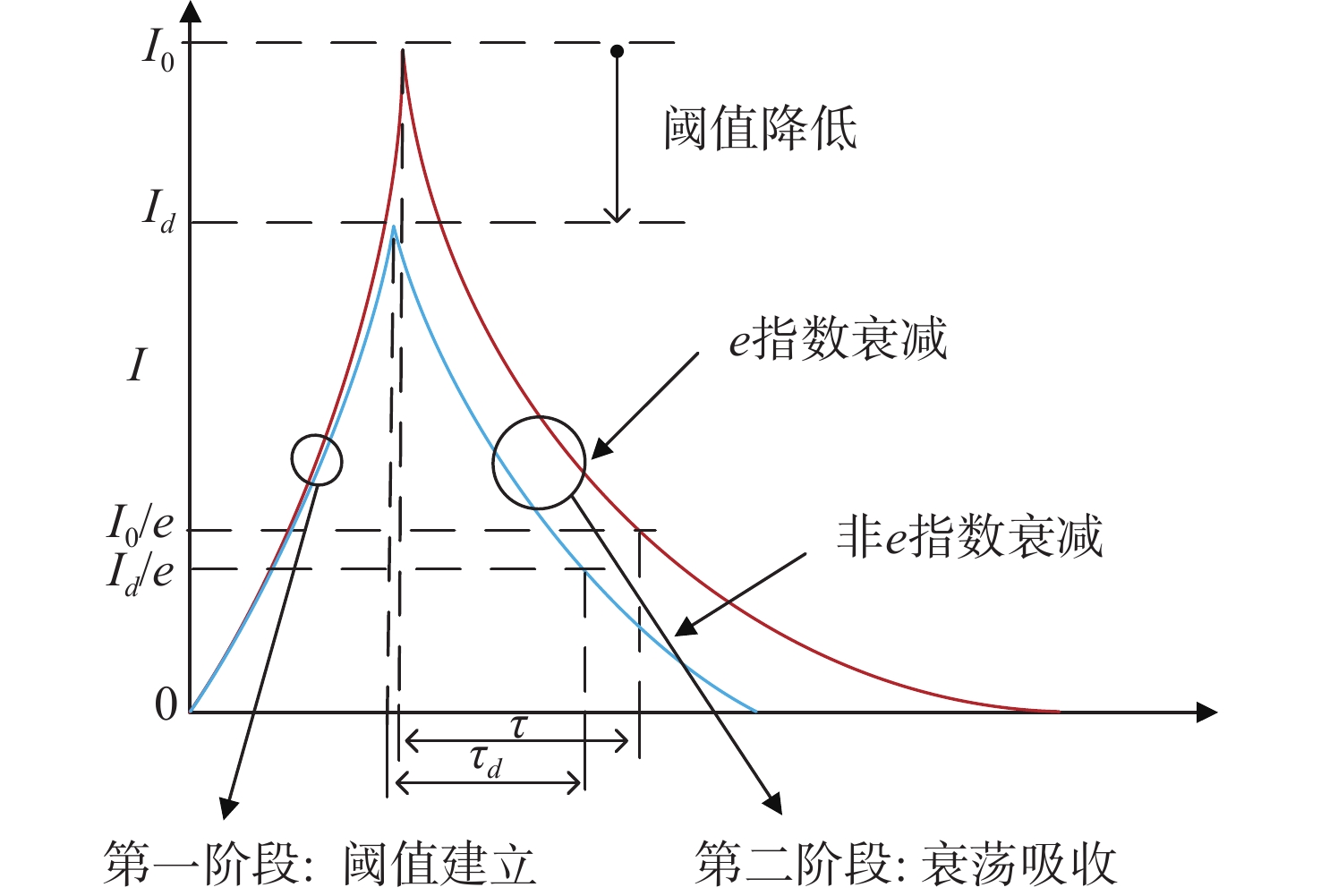
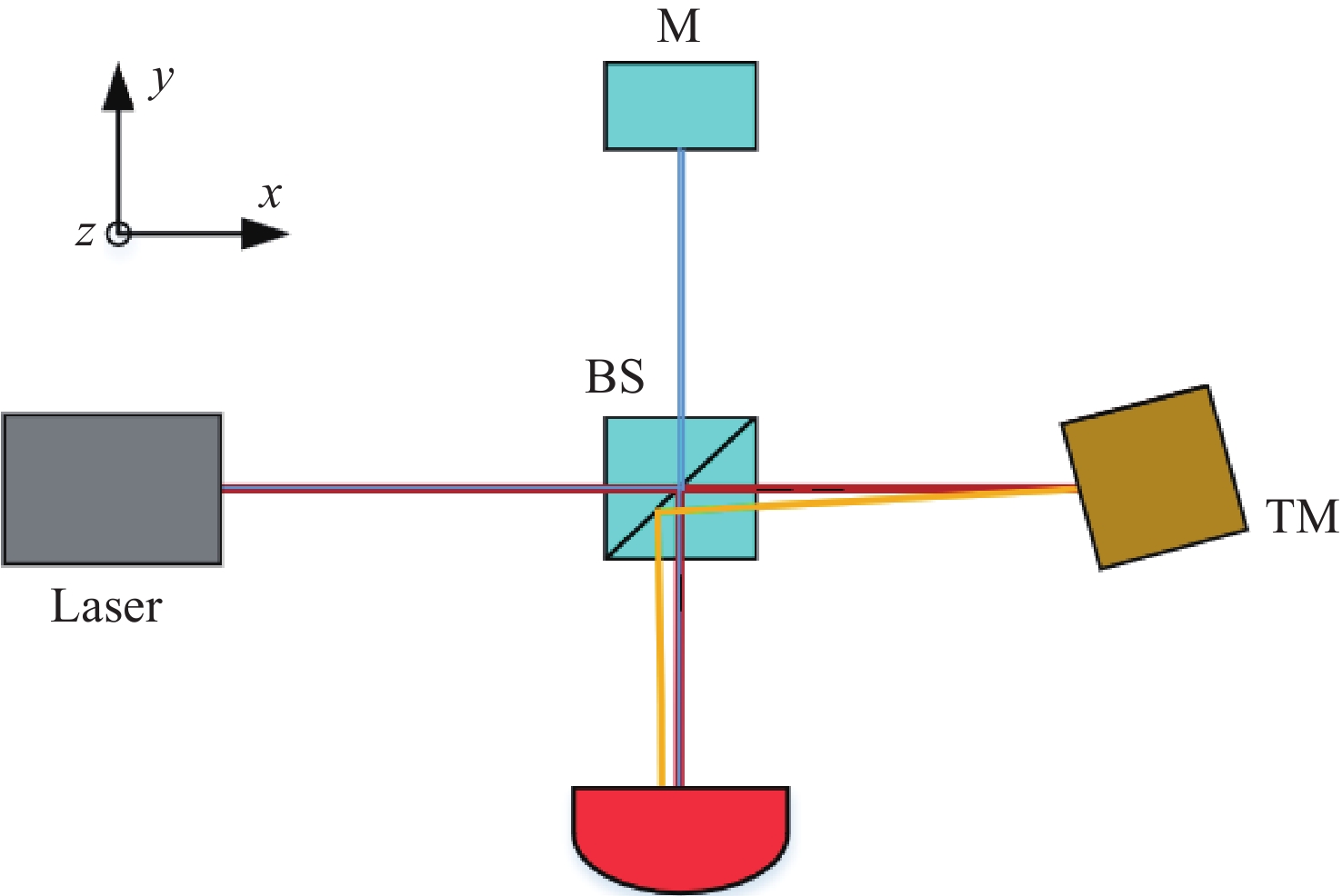
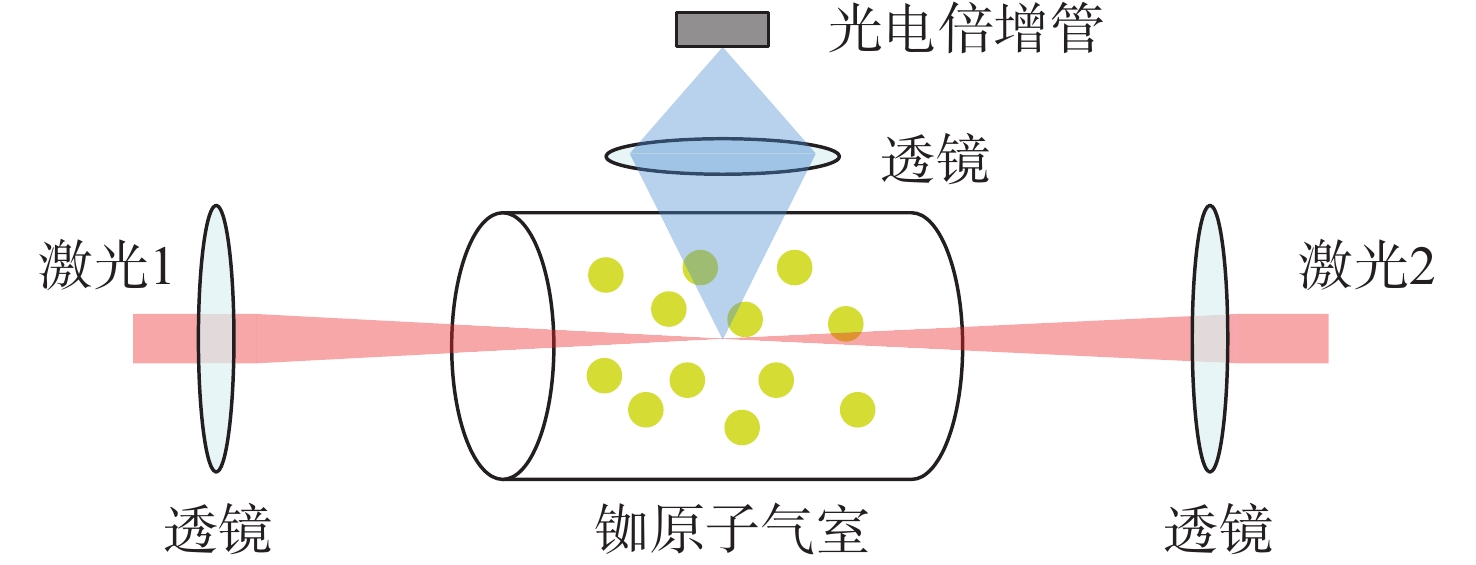
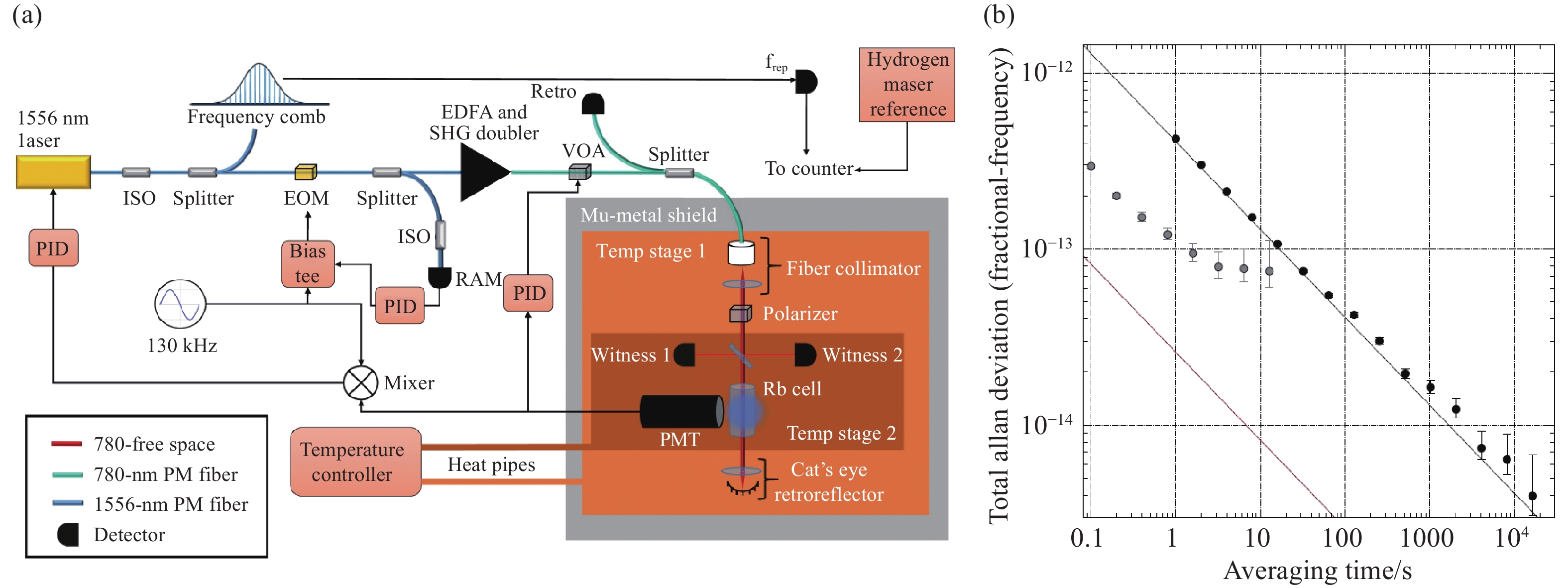
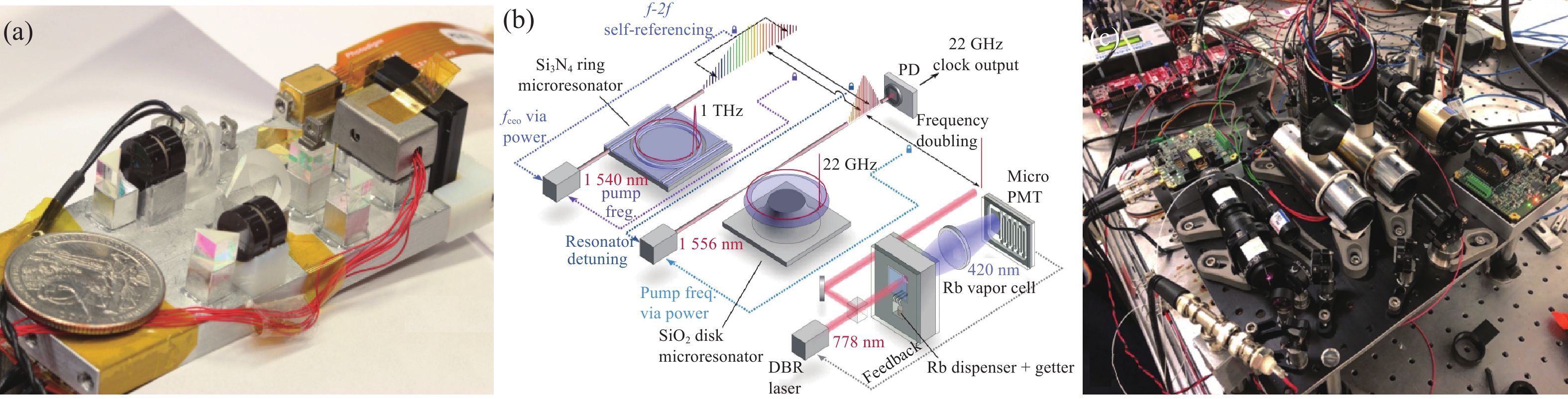
基于双光子跃迁的光学频率标准因其稳定度高、复现性好和易于小型化等显著优势,有望成为实际可用的小型化光频标。本文简要阐述了双光子跃迁的基本原理,介绍了国内外基于双光子跃迁的铷原子光频标的研究现状和进展,最后分析得出未来基于双光子跃迁的铷原子光学频率标准的发展趋势为系统小型化、性能指标提升以及集成应用与工程化。
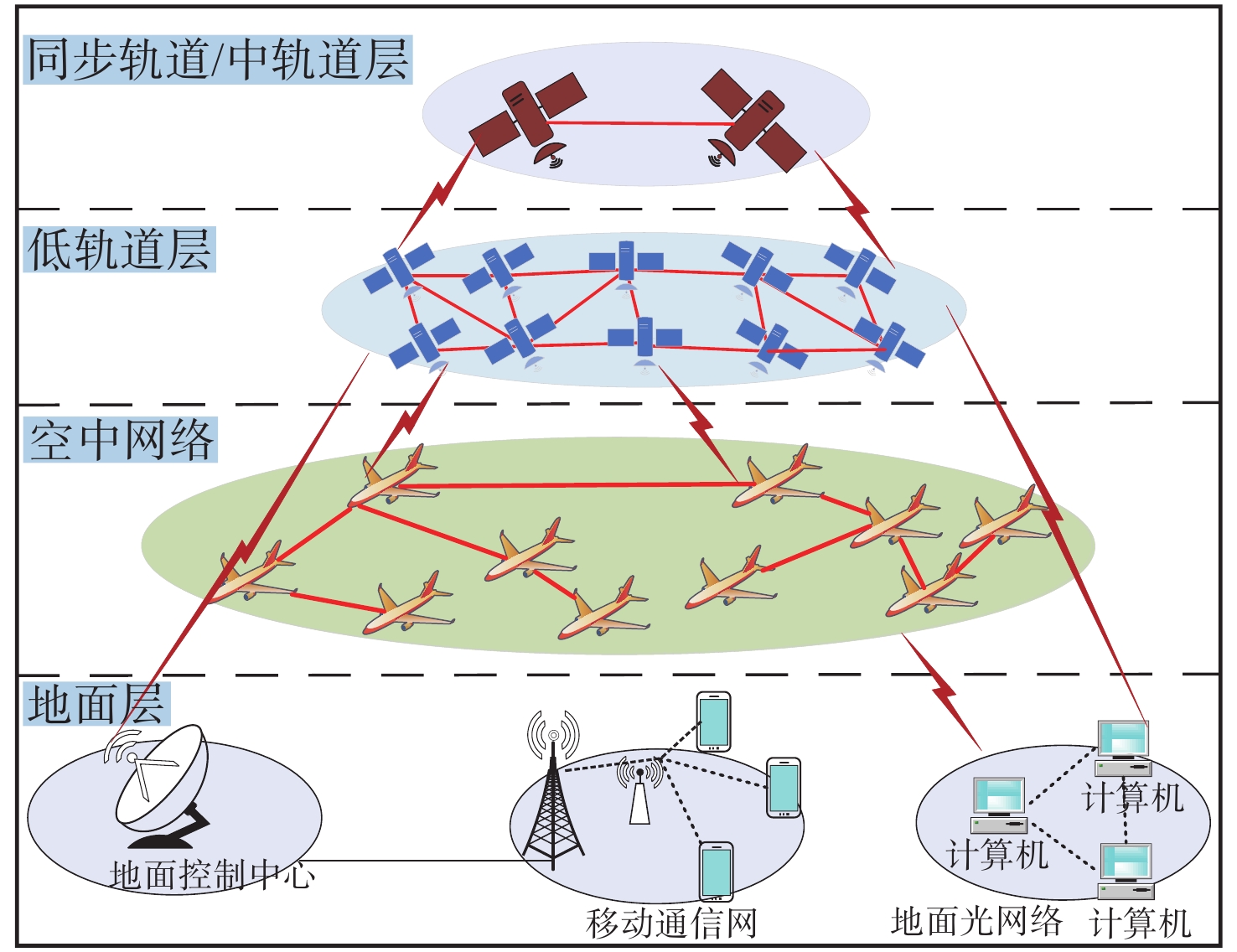
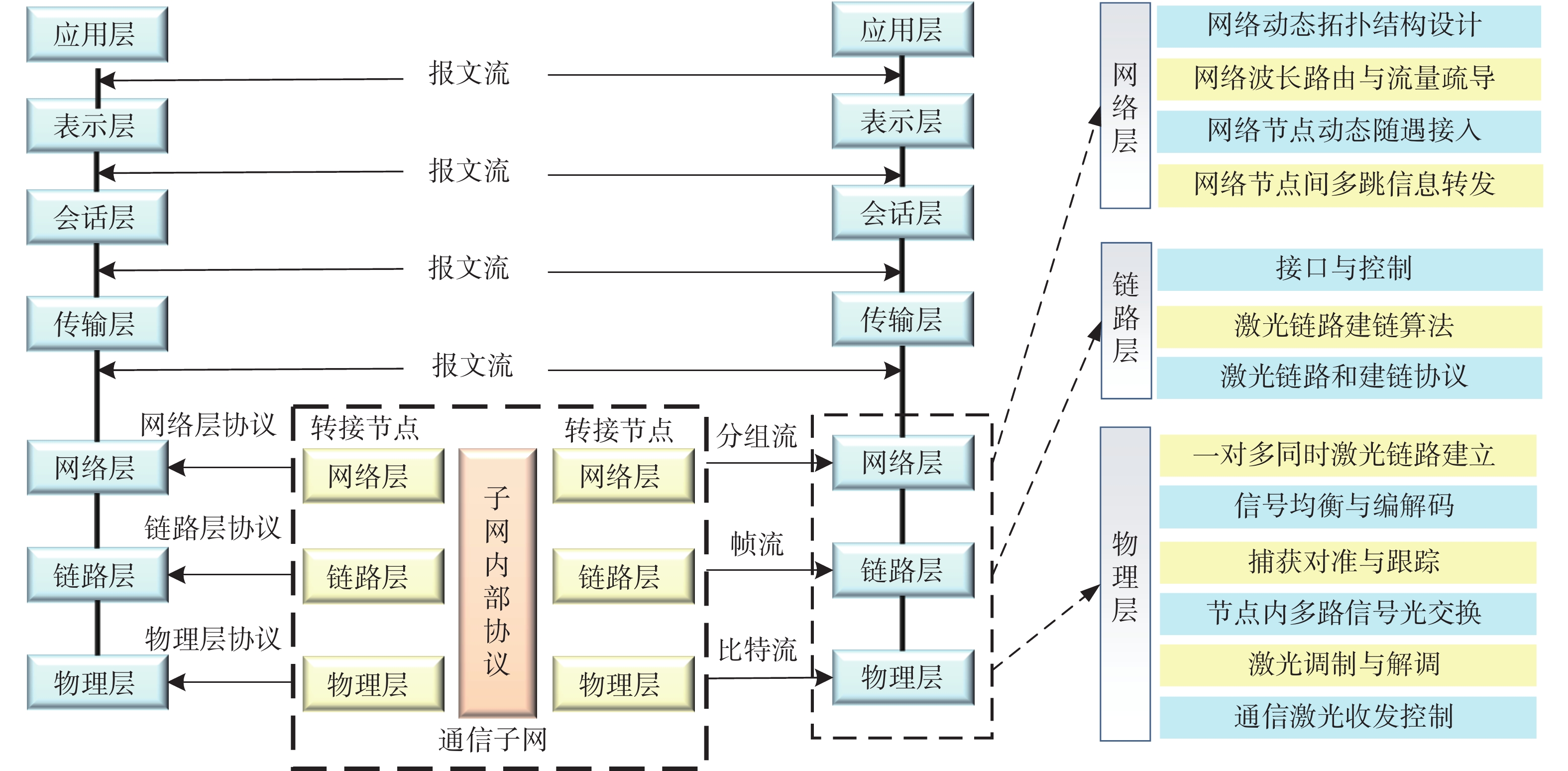
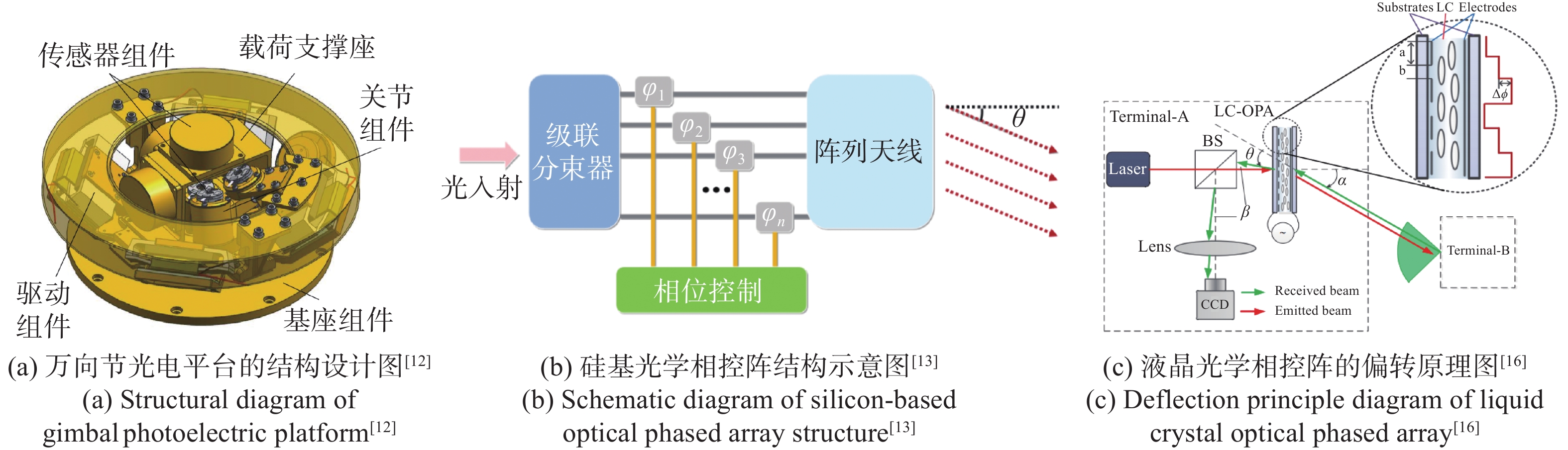
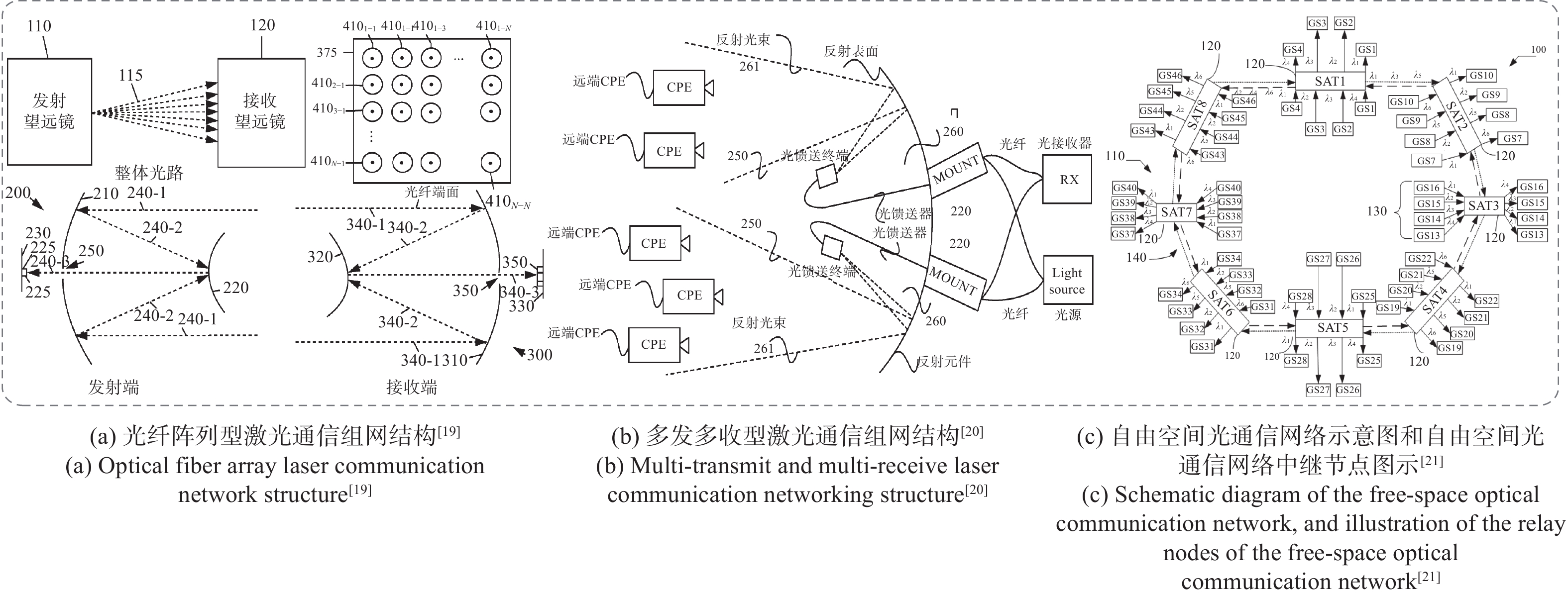
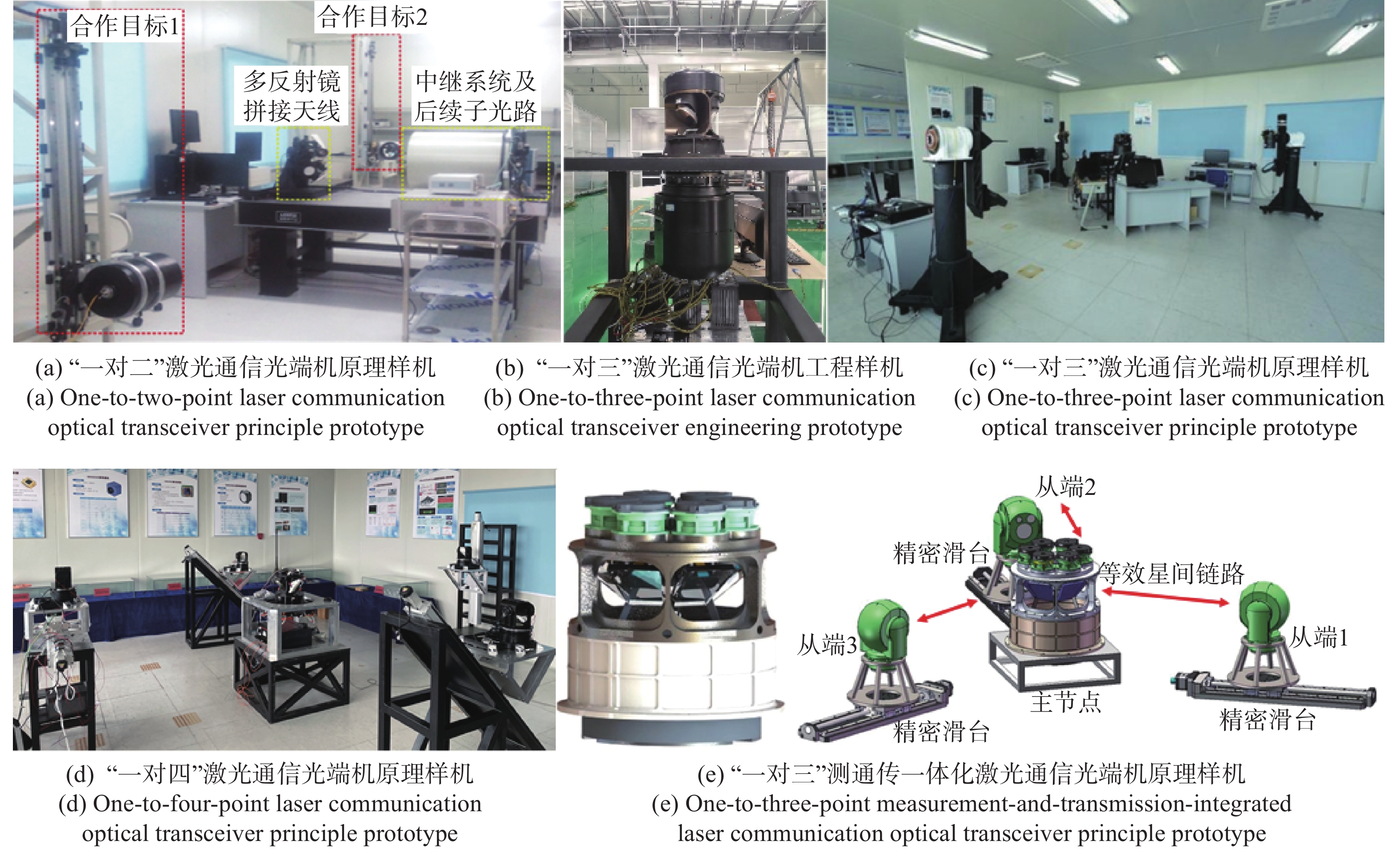
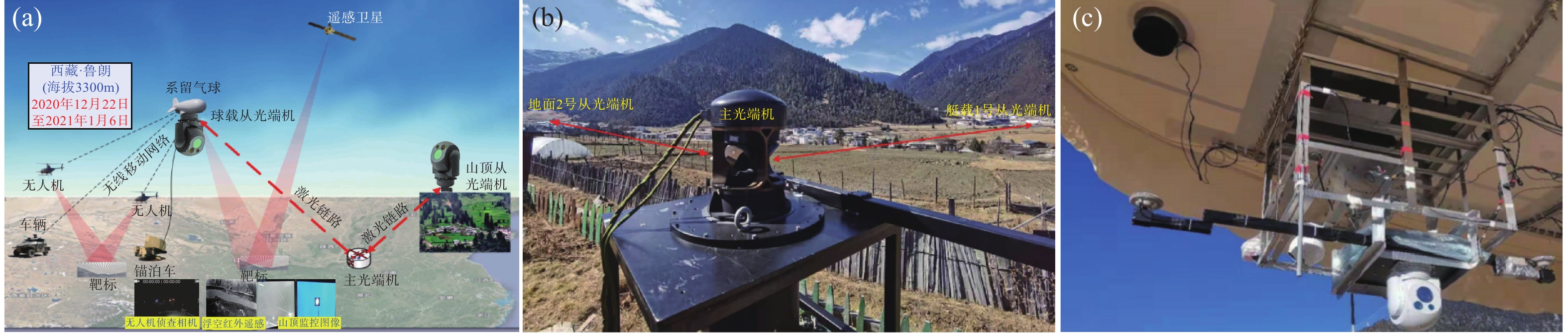
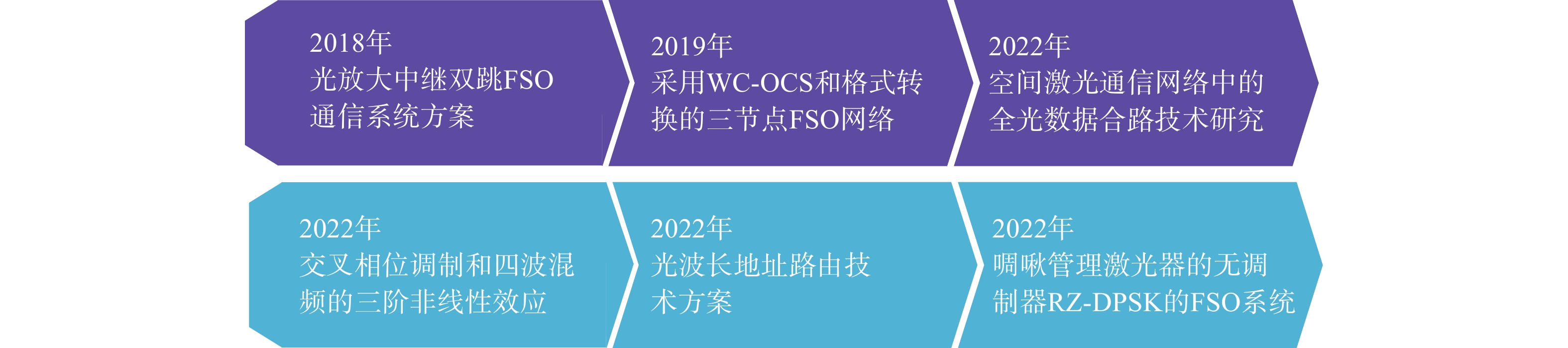
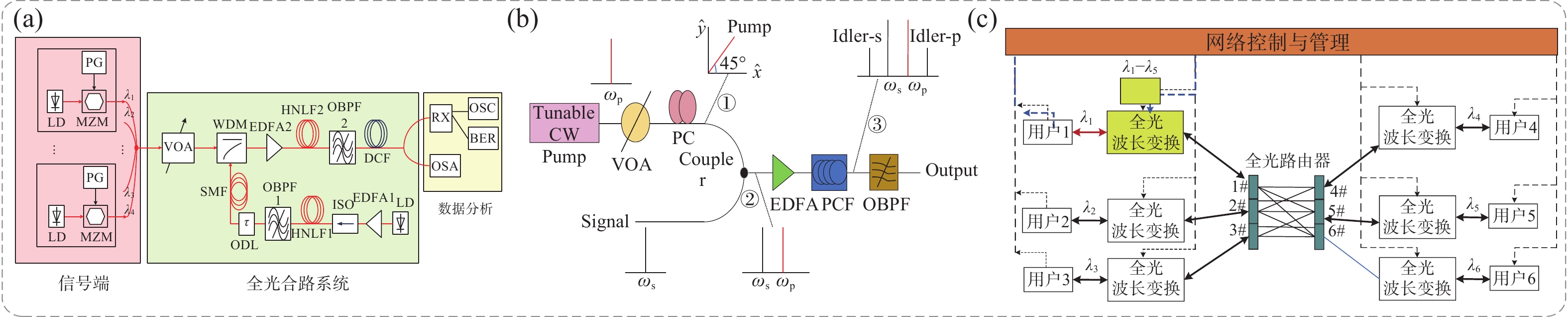
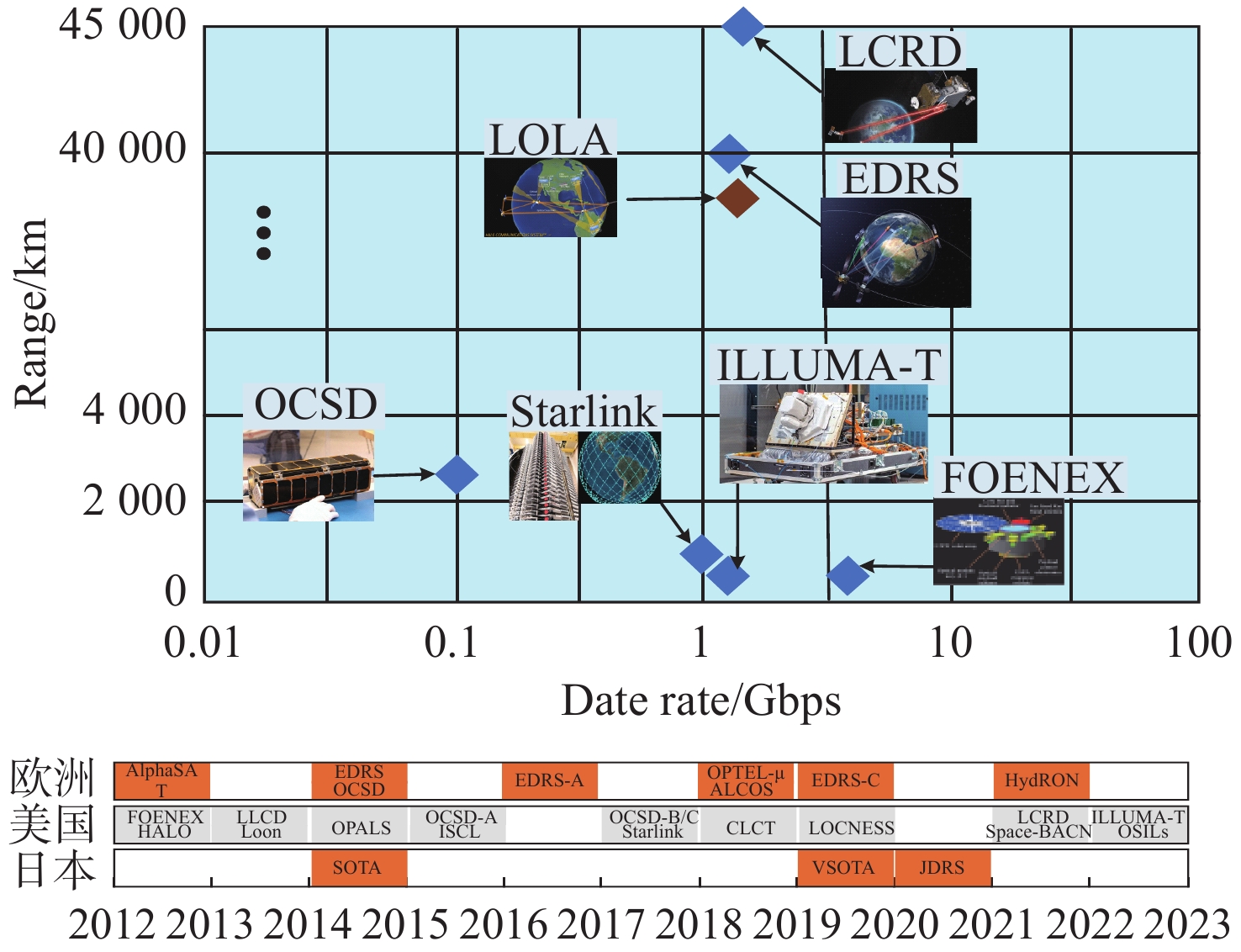
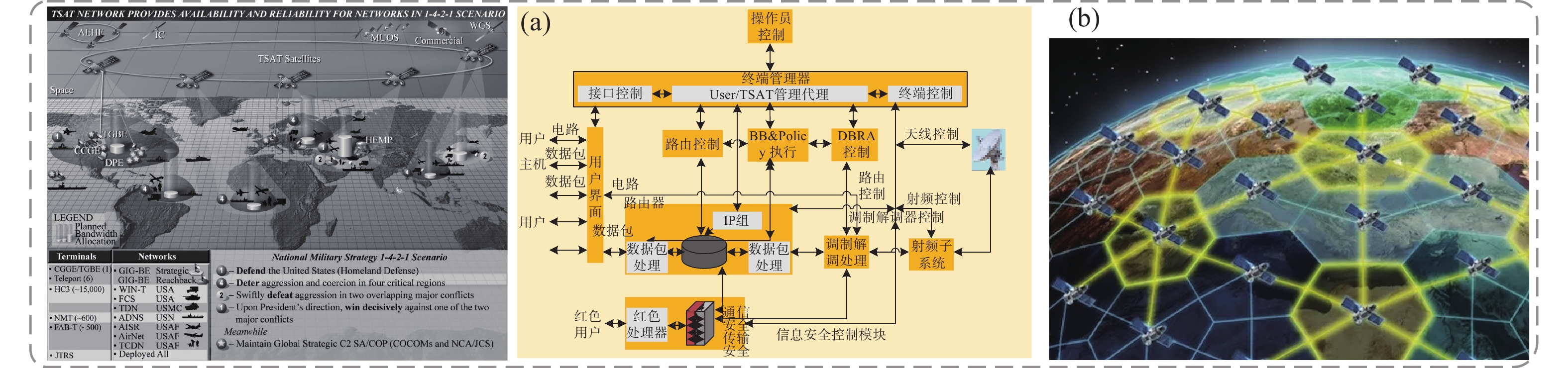
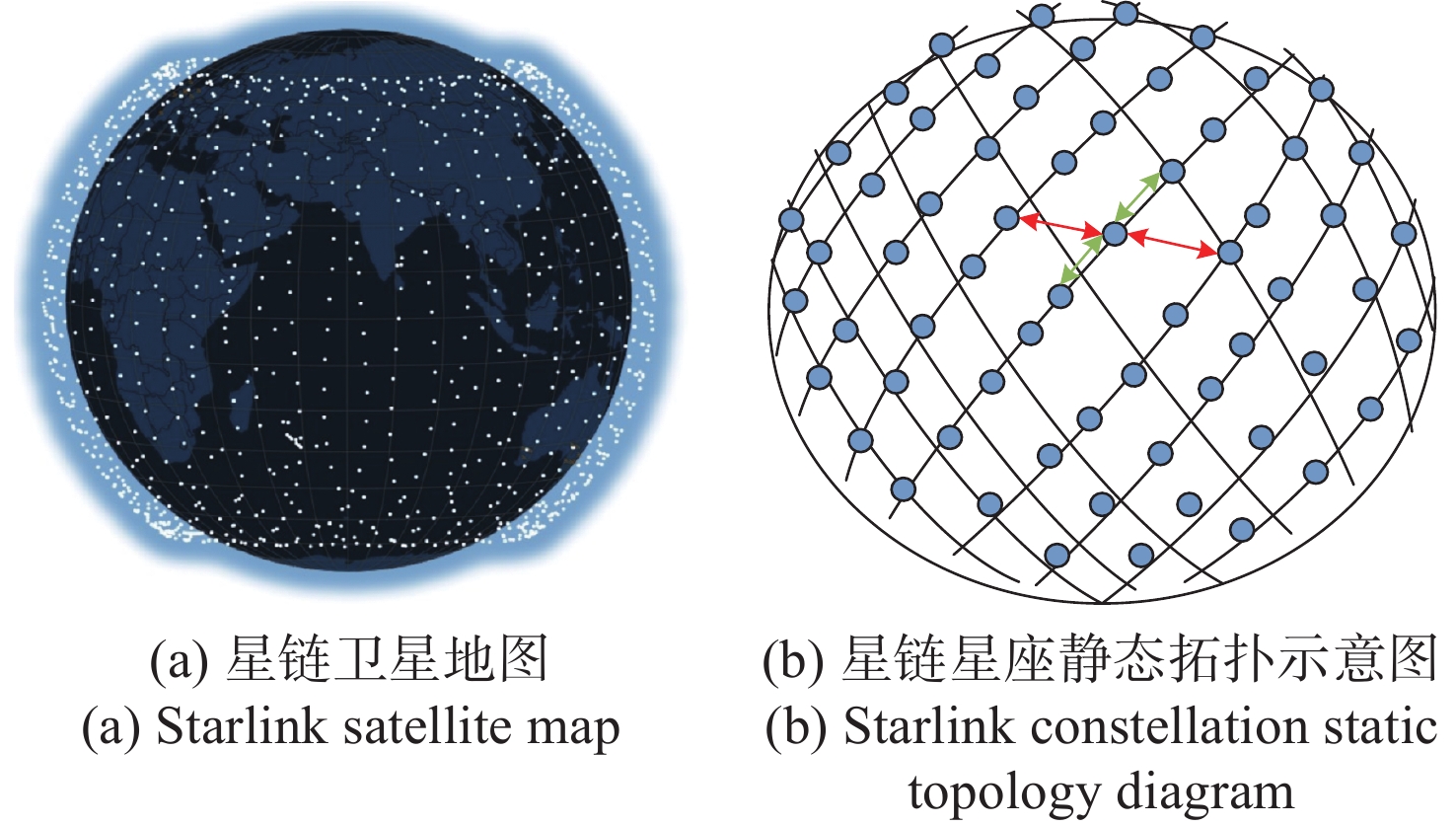
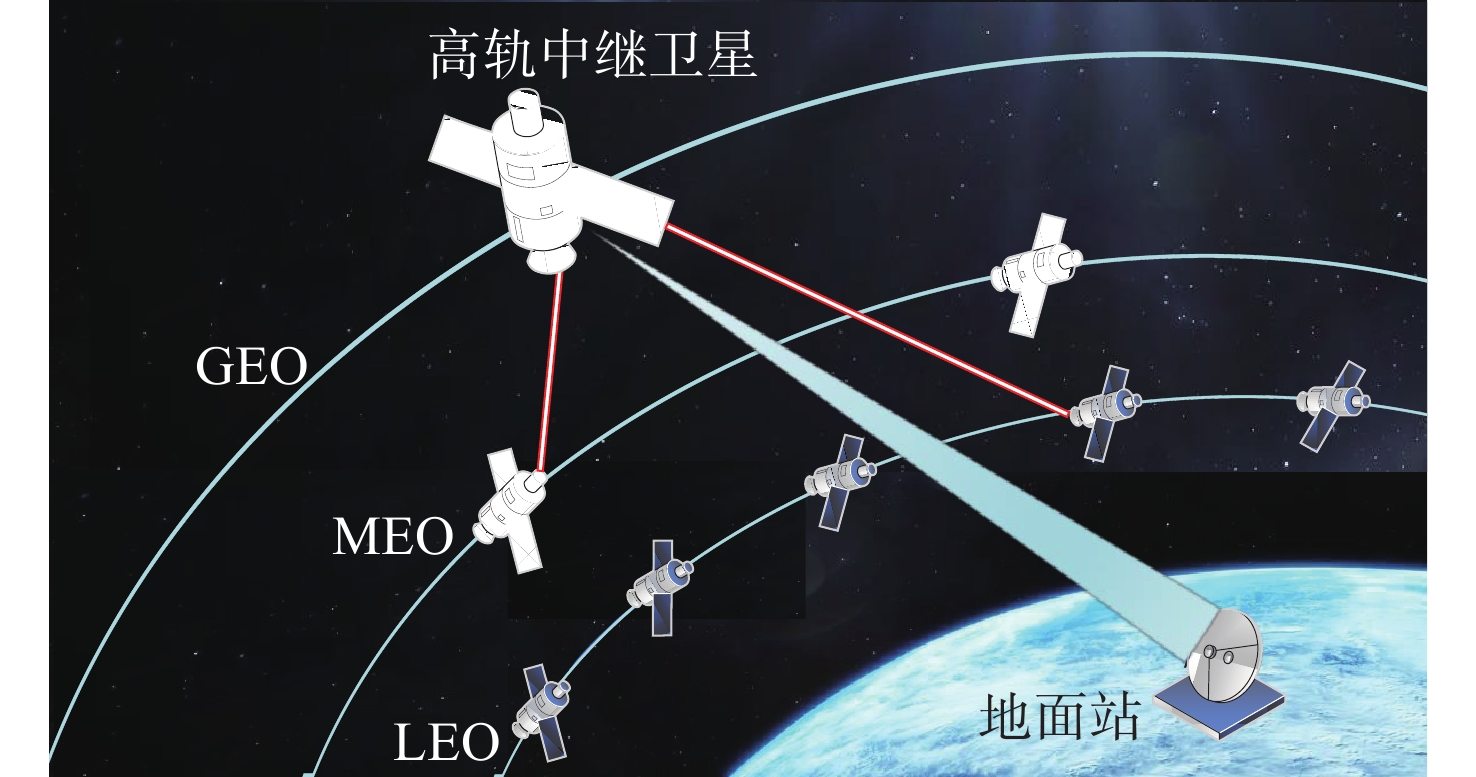
激光通信是以光波为载体实现信息传输的通信技术,具有高速率、高带宽、小尺寸、抗干扰和保密性好等优势,具备实现空间信息网络高速传输和安全运行的关键能力。本世纪以来,国内外主要研究机构致力于研究激光通信技术在实现组网过程中所需要解决的一系列问题,包括一点对多点同时激光通信、节点内多路信号全光交换与转发、节点动态随遇接入、网络动态拓扑结构设计等关键技术,并开展了众多演示验证实验,部分研究成果已经投入应用。本文在对空间激光通信组网技术进行分析探讨的基础上,概述了国内外激光通信组网技术的发展现状,重点对卫星星座、卫星中继和航空网络等领域中激光通信组网技术的应用情况和发展现状进行了分析和总结,对国内相关研究技术方案、实验验证情况等进行了综述,最后对激光通信组网技术与应用的发展趋势进行了预测。
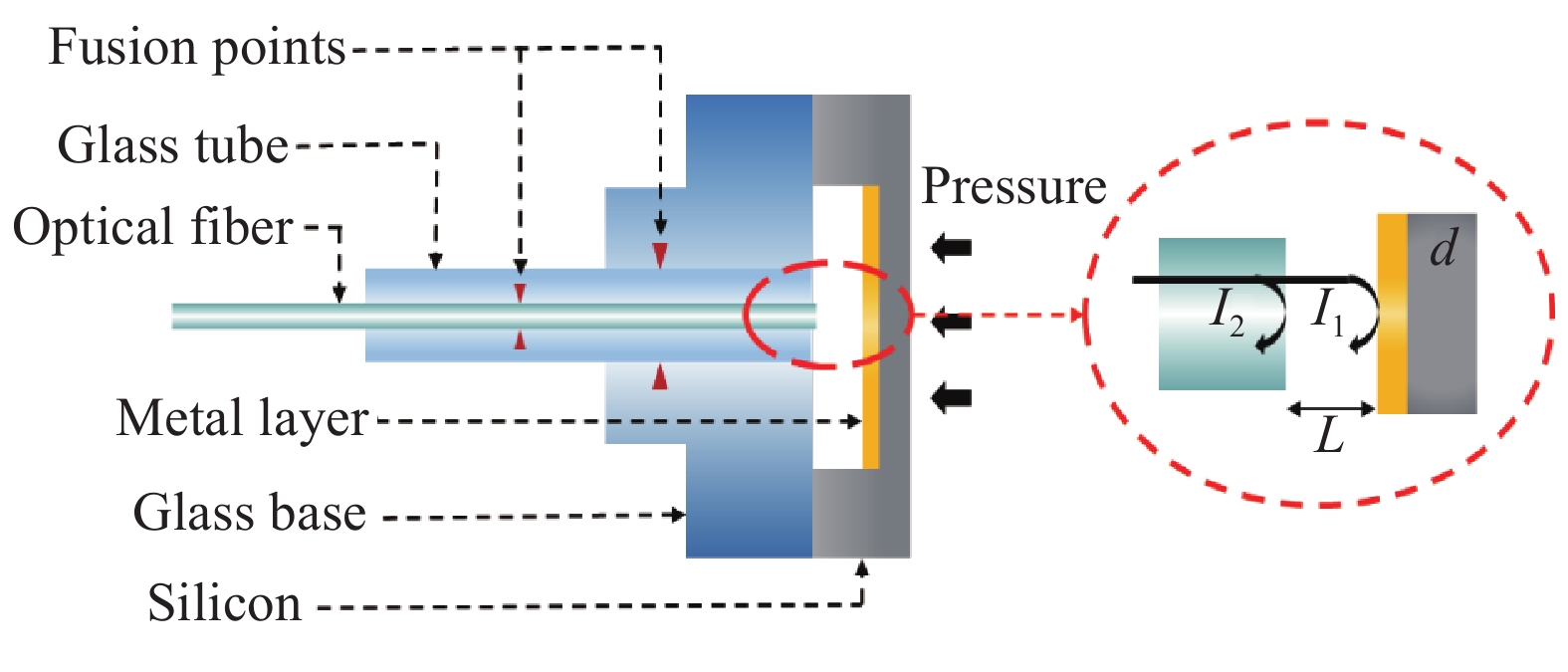
本文提出了一种基于微机电系统(MEMS)的光纤法布里-珀罗压力传感器,可用于冲击波等瞬态压力测量。该传感器敏感单元由深反应离子刻蚀(DRIE)后的单晶硅和BF33玻璃晶圆通过阳极键合制成,并通过激光熔接技术实现光纤与敏感单元的无胶化集成。通过搭建信号解调实验平台,对静态和动态压力环境下的传感器性能进行测试。实验结果表明,该传感器在0~10 MPa压力范围内具有良好的线性响应,满量程非线性误差为0.41%,迟滞为0.37%,传感器的上升时间为8.5 μs。该传感器具备抗电磁干扰、可批量化制备、一致性高、成本低等优点,理论谐振频率为1.39 MHz,展示了其在爆炸场等恶劣环境下进行动态压力测量的良好应用前景。
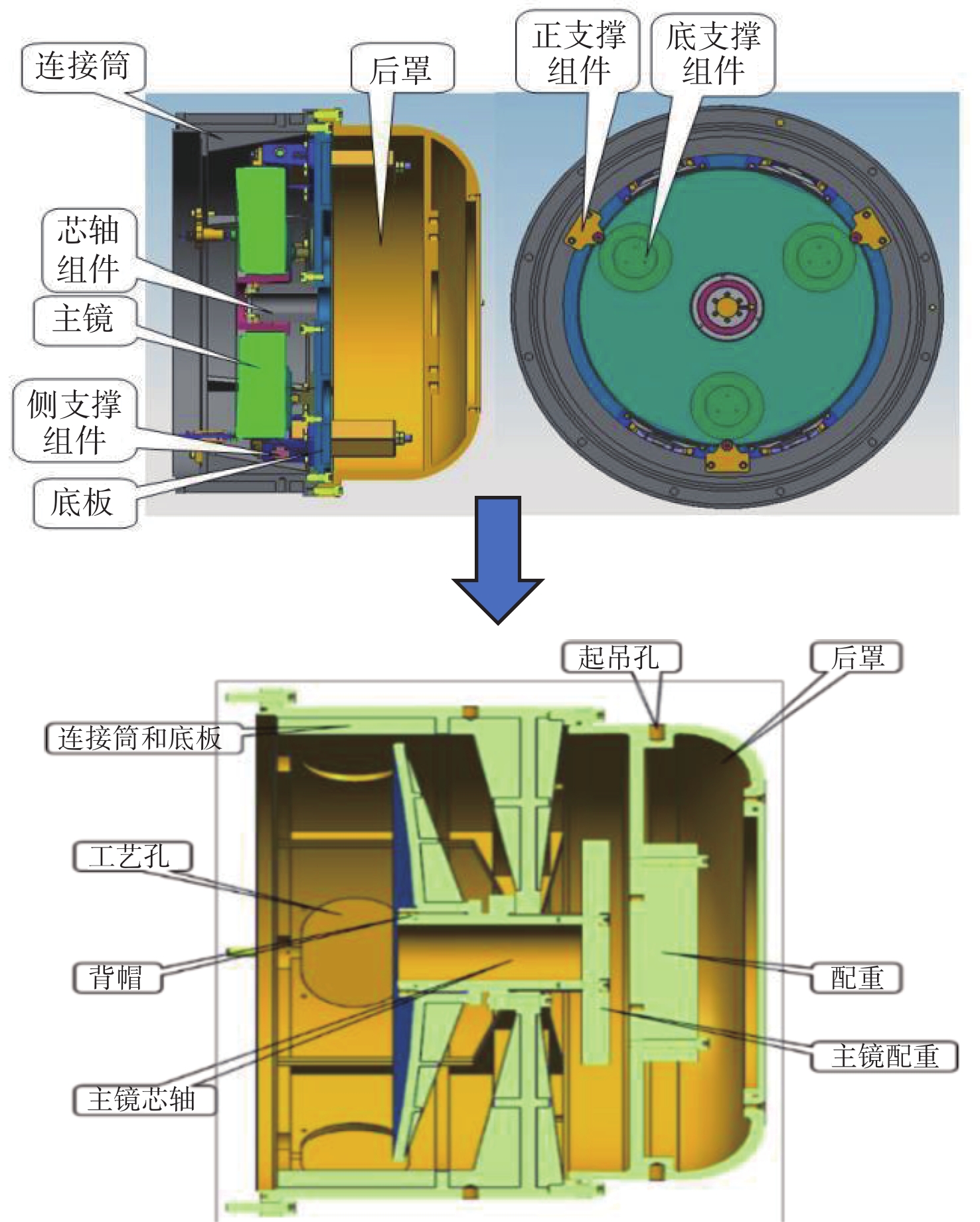
为简化某地基望远镜主镜的支撑方式,兼顾保障望远镜成像质量和精度,研究了460 mm口径单轴支撑碳化硅主镜的优化设计。首先,确定了相近线胀系数材料的单轴支撑方案和扇形的主镜背部结构,针对支撑结构和材料特性,利用先进的碳化硅烧结技术可制备异性结构的特性,结合优化设计理论,在满足主镜面型精度的前提下,对主镜进行了轻量化设计。优化后的主镜质量仅为4.82 kg,主镜水平状态下面型仿真分析RMS为λ/51.4。经实际工程验证,主镜支撑后水平状态下面型精度检测结果优于λ/42,轻量化效果显著并满足实际使用要求。本研究为工程项目提供了理论基础和技术储备。
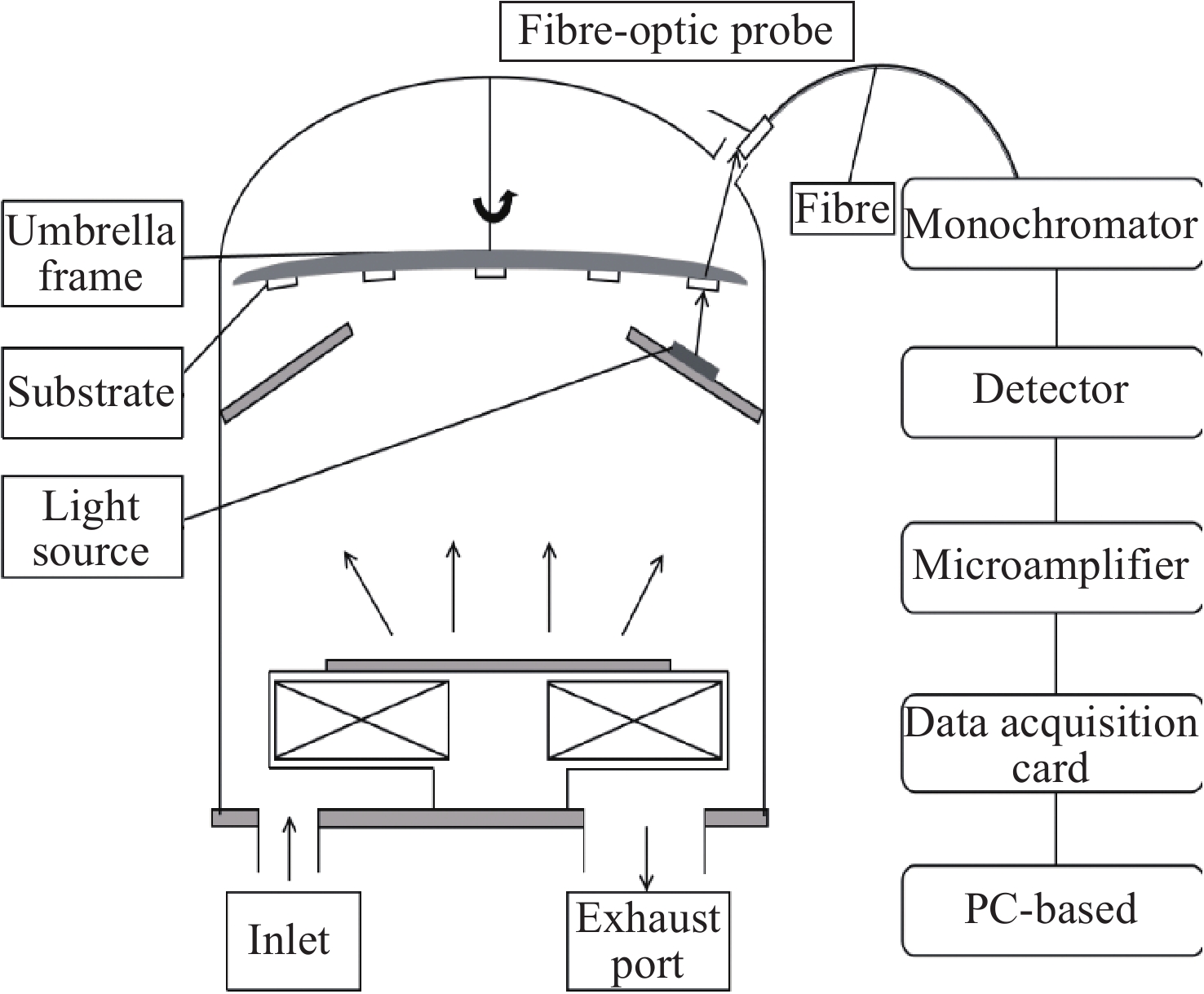
为提高红外波段膜厚控制精度和实现波长精准定位,基于LabVIEW编程语言,开展了以光学膜厚监控系统为基础的变量耦合动态监控光学膜厚补偿技术研究。基于光的干涉以及光学薄膜设计理论,采用光电极值法构建数学模型,重点解决极值点判停误差和滤波除噪等问题,高度还原实时采集的光量值的监控数据,实时同步拟合膜厚监控的透射曲线,计算并拟合膜厚极值点以及任意目标厚度对应的停镀点,实现膜厚有效准确的判停。为了验证光控系统的可靠性和稳定性,通过制备
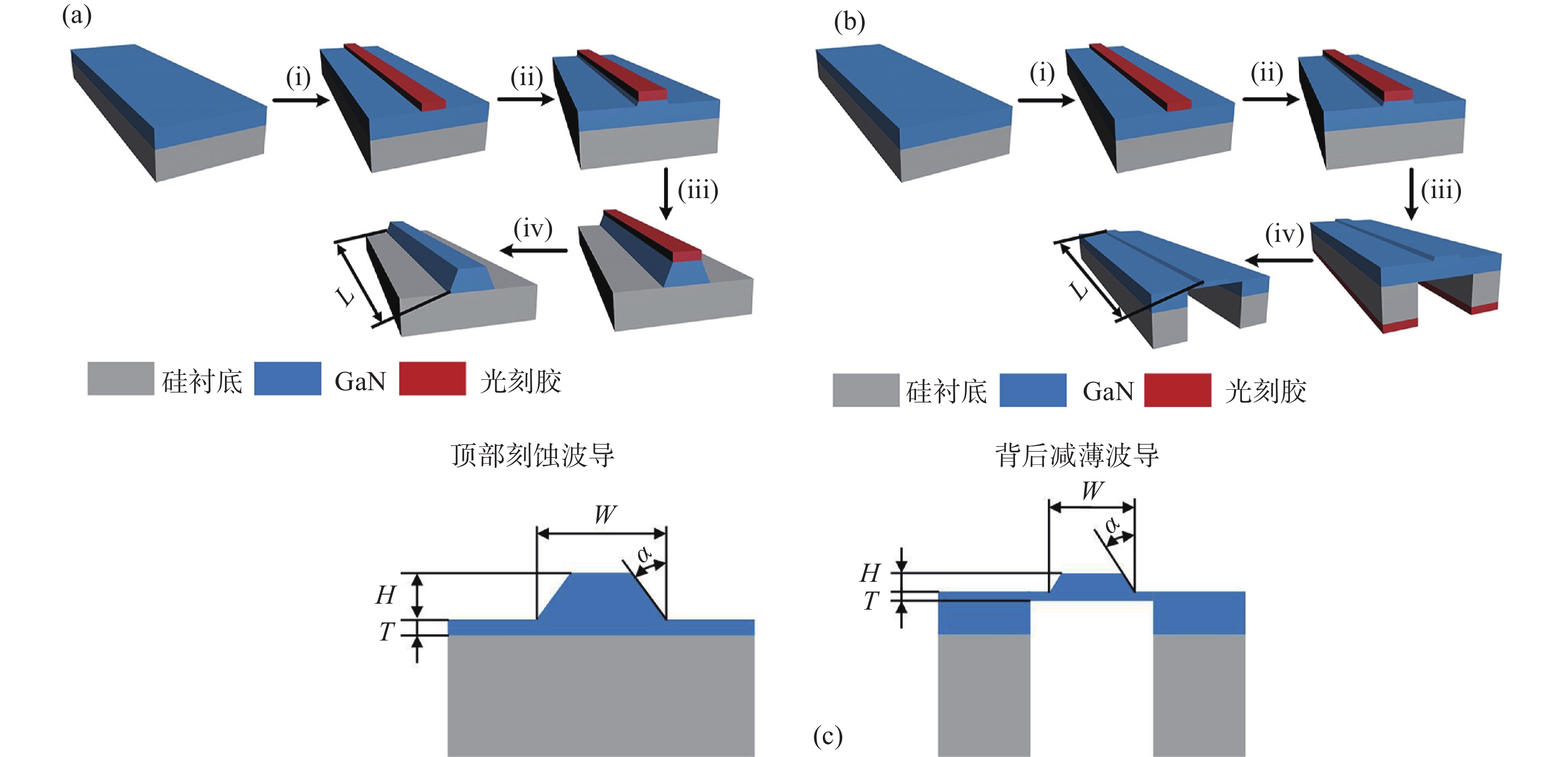
本文利用基于光束传播方法的有限元仿真模型研究了氮化镓(GaN)平面光波导的传输损耗特性,并针对传统GaN波导损耗较大的问题提出了工艺优化方案。通过构建完整的传输损耗模型,系统分析了波导几何参数对传输特性的影响,重点研究了顶部刻蚀和背后减薄两种优化工艺的改善效果。研究结果表明,这两种工艺均可显著降低波导传输损耗。其中顶部刻蚀工艺和背后减薄工艺可将损耗从2.29 dB/mm分别降至0.19 dB/mm和0.24 dB/mm。此外,本文还量化分析了制造工艺引入的侧壁夹角和表面粗糙度等缺陷对传输损耗的影响,并通过参数优化确定了实现可见光单模传输的关键结构尺寸。本文研究成果为设计和制备低损耗GaN平面光波导提供了理论依据和工艺指导。
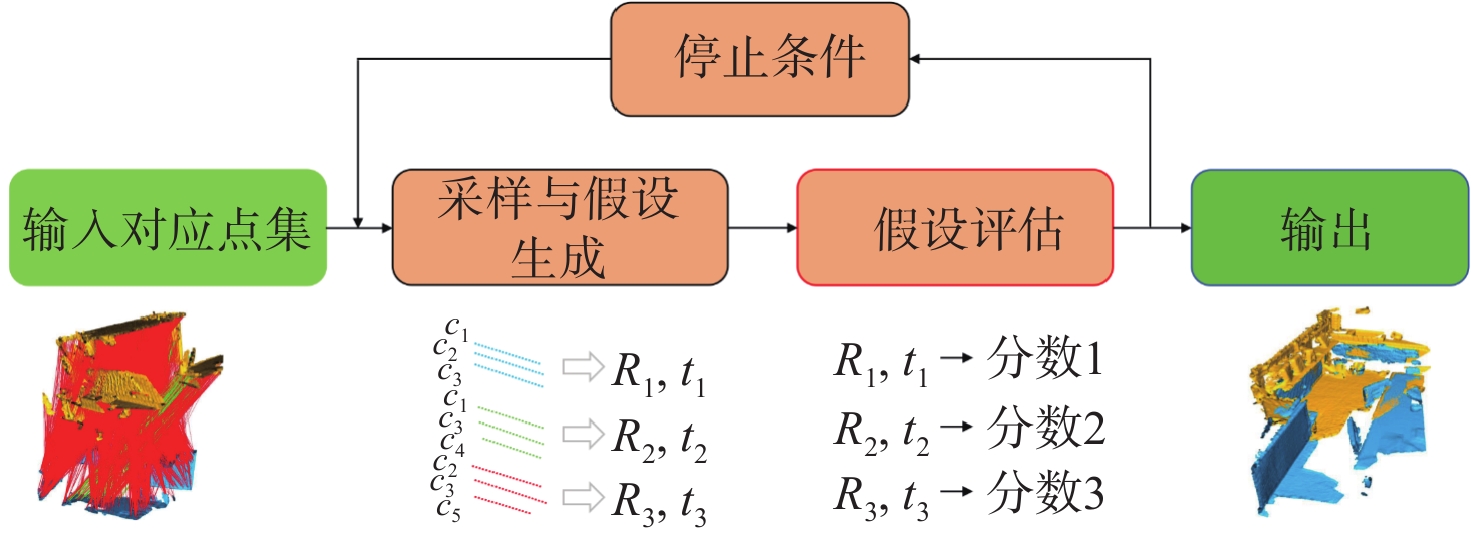
本文提出了一种创新的假设度量方法,将通过三角形投票方法获得的点对置信分数与基于点对的度量相结合。该方法核心观点是:一个好的假设应能将高置信分数的对应点精确对齐,从而产生更高的得分贡献。此外,本文还对现有基于内点的度量有效性方法加以改进,提出2种改进方法:忽略具有较小变换误差的内点距离,以及抑制由大量低置信度对应点引起的错误高分贡献。在3个数据集上的对比实验表明,所提出的度量方法能够提升所有已知的基于点对的度量准确性,并在默认参数设置下有1%~16.95%不同程度的配准性能提升和1.67%~10.79%的时间节约,在时间消耗、鲁棒性和配准性能之间实现了更好的平衡。特别地,改进的内点计数度量具有更加鲁棒和精确的配准性能。因此,本文所提出的度量能够在RANSAC的假设评估阶段识别出更正确的假设,从而实现精确的点云配准。
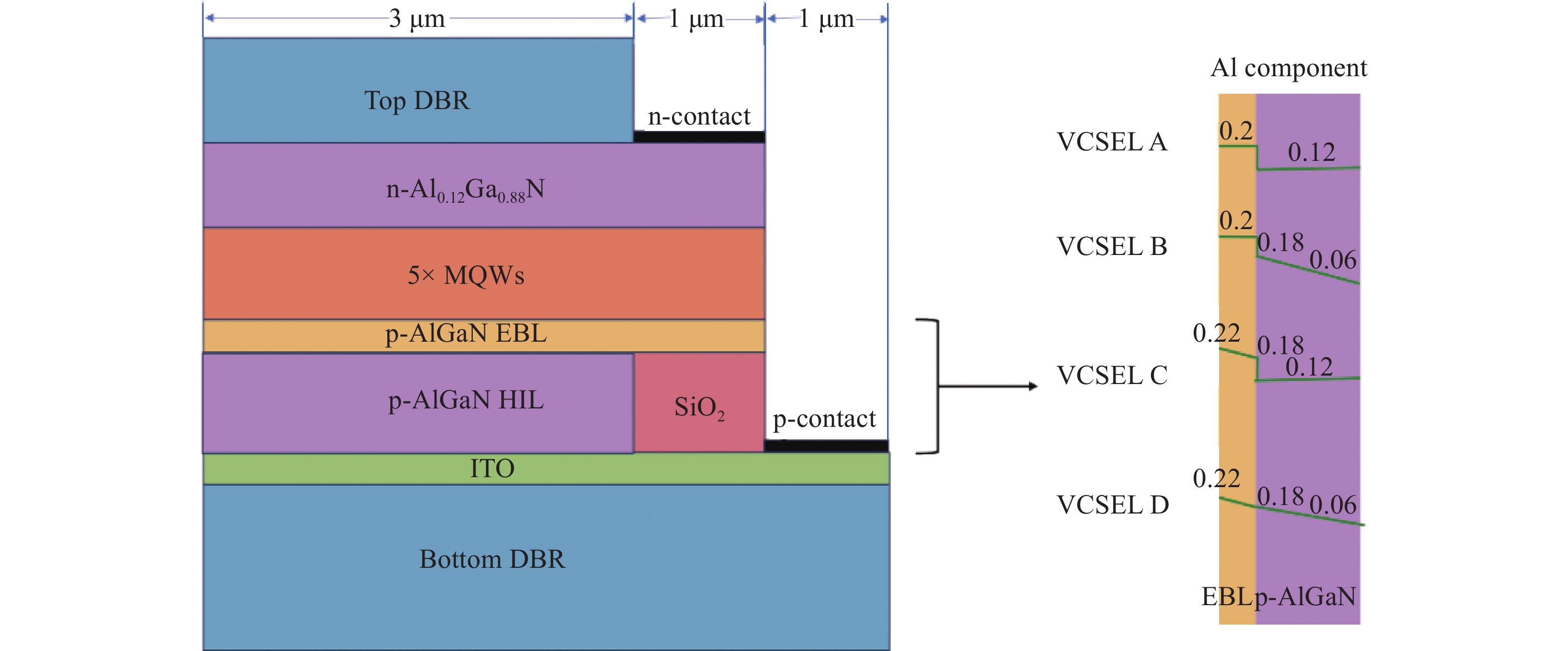
由于GaN基紫外VCSEL中的空穴注入层p型掺杂效率较低,导致多量子阱中不能实现有效空穴注入,这极大地降低了紫外VCSEL的光电性能。本文设计了一种基于AlGaN的UV VCSEL中使用渐变HIL和EBL结构。该结构能够提高空穴注入效率,使空穴注入层中的空穴浓度增加,也能够使电子阻挡层和空穴注入层界面处的空穴势垒高度降低,从而利于空穴注入。使用商用软件PICS3D构建了该结构,并对能带结构以及载流子浓度等进行了模拟和理论分析。通过空穴注入层Al组分渐变引入极化掺杂增加空穴浓度从而提高空穴注入效率。在此基础上电子阻挡层渐变消除了空穴注入层和电子阻挡层界面的空穴突变势垒,使价带更平滑。这提高了多量子阱中的受激辐射复合速率,增强了激光功率。因此,渐变的p型层设计可以提升紫外VCSEL的光电性能。
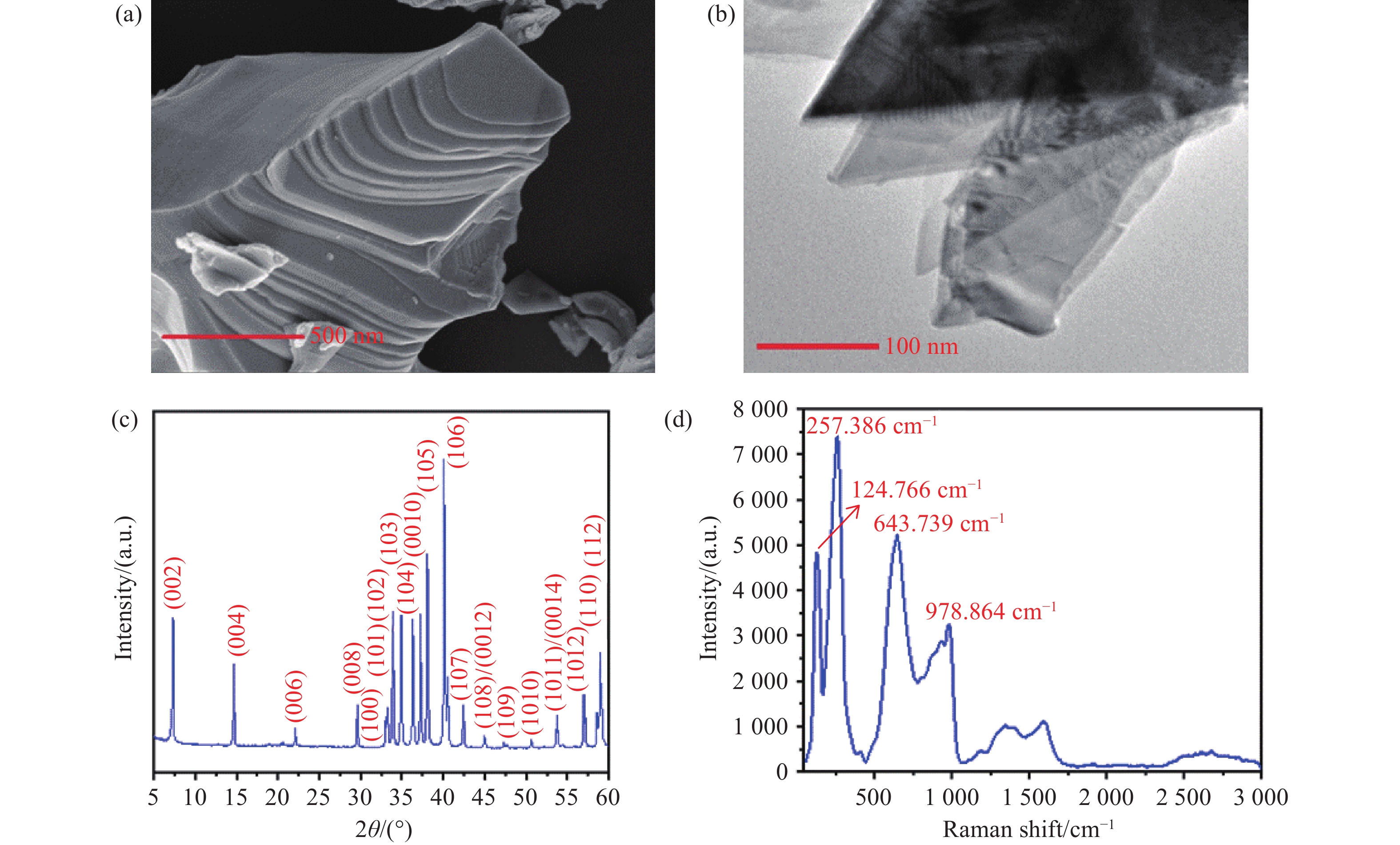
本文采用MAX相(MAX-PM)材料Nb4AlC3作为可饱和吸收体(SA),研制了传统孤子(CS)锁模掺铒光纤(EDF)激光器。首先,利用液相剥离(LPE)法制备了Nb4AlC3纳米片,然后采用拉锥光纤制作了Nb4AlC3-SA。该Nb4AlC3可饱和吸收体的饱和强度和调制深度分别为2.02 MW/cm2和1.88%。基于所制备的Nb4AlC3可饱和吸收体,研制了传统孤子锁模掺铒光纤激光器。该激光器的中心波长、脉冲持续时间和脉冲重复率分别为
高功率激光在内通道传播过程中,光束会在导光路径中对传播介质加热,从而产生热晕现象,这会影响高能激光设备出光口处光束质量。此外,由于内通道中光路排布复杂,因此对导光路径上热晕影响的评估往往需要复杂的工作和较长的时间。为适应工程中对导光路径热晕效应快速评估的需要,本文提出一种基于有限元法的内光路热晕效应快速模拟方法。该方法对流体区域进行微元划分,利用有限元分析方法进行流场分析。对复杂内通道的流场区域建立简化分析模型,在简化模型中划分等晕区域。根据各等晕区域内光程差计算结果,完成热晕效应导致的相位畸变的数值模拟计算。将计算结果与现有方法计算结果对比,结果显示:对于复杂光路,该方法计算结果与现有方法计算结果偏差小于3.6%,相位畸变形式相近;对于L型单元,该方法计算结果与现有方法计算结果得到的主要像差影响因素和变化规律相同。利用该方法完成了对直管道不同重力作用方向下的热晕影响分析,结果显示:相位畸变随重力方向变化而变化,相位变化的大小与重力在垂直于光轴方向的分量大小有很强的相关性。该方法相较于现有方法灵活性高、无需进行复杂自编分析程序调试。该方法的分析结果在工程设计阶段能够快速评估内通道导光路径中的热晕效应,为确定热晕抑制方法提供重要参考。
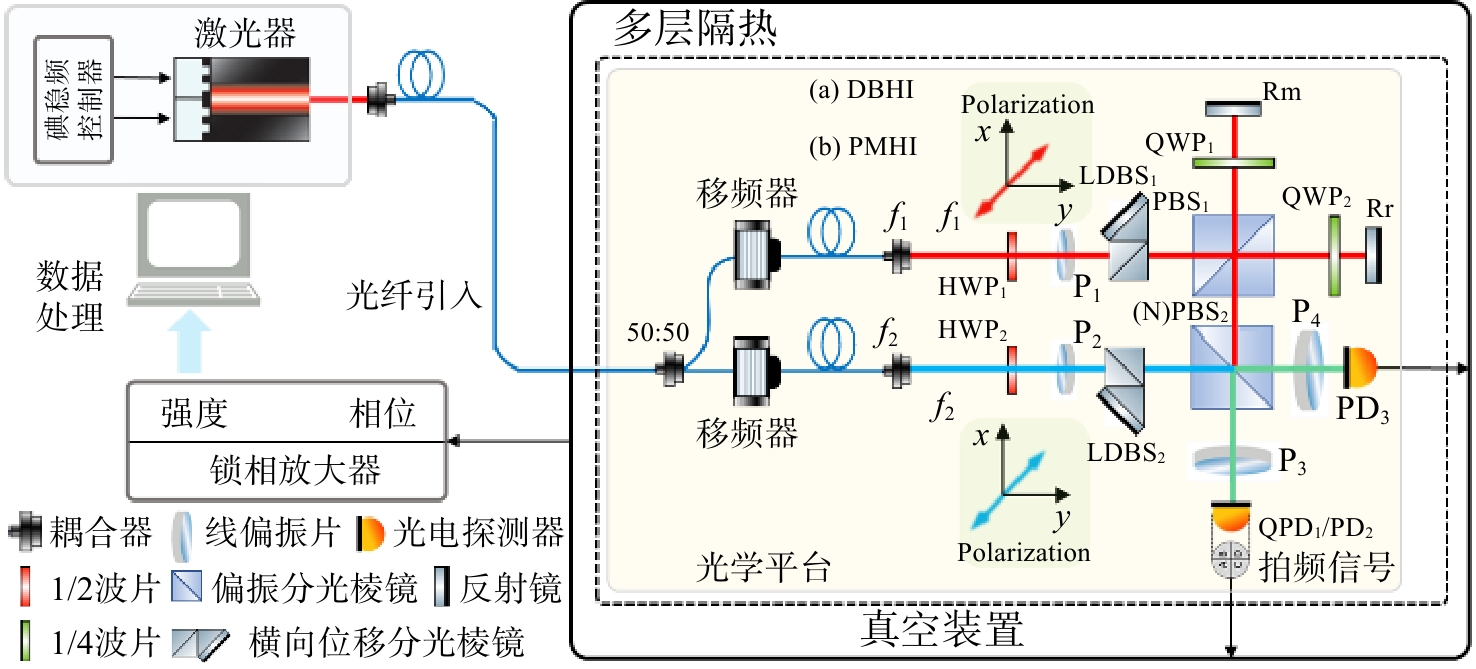
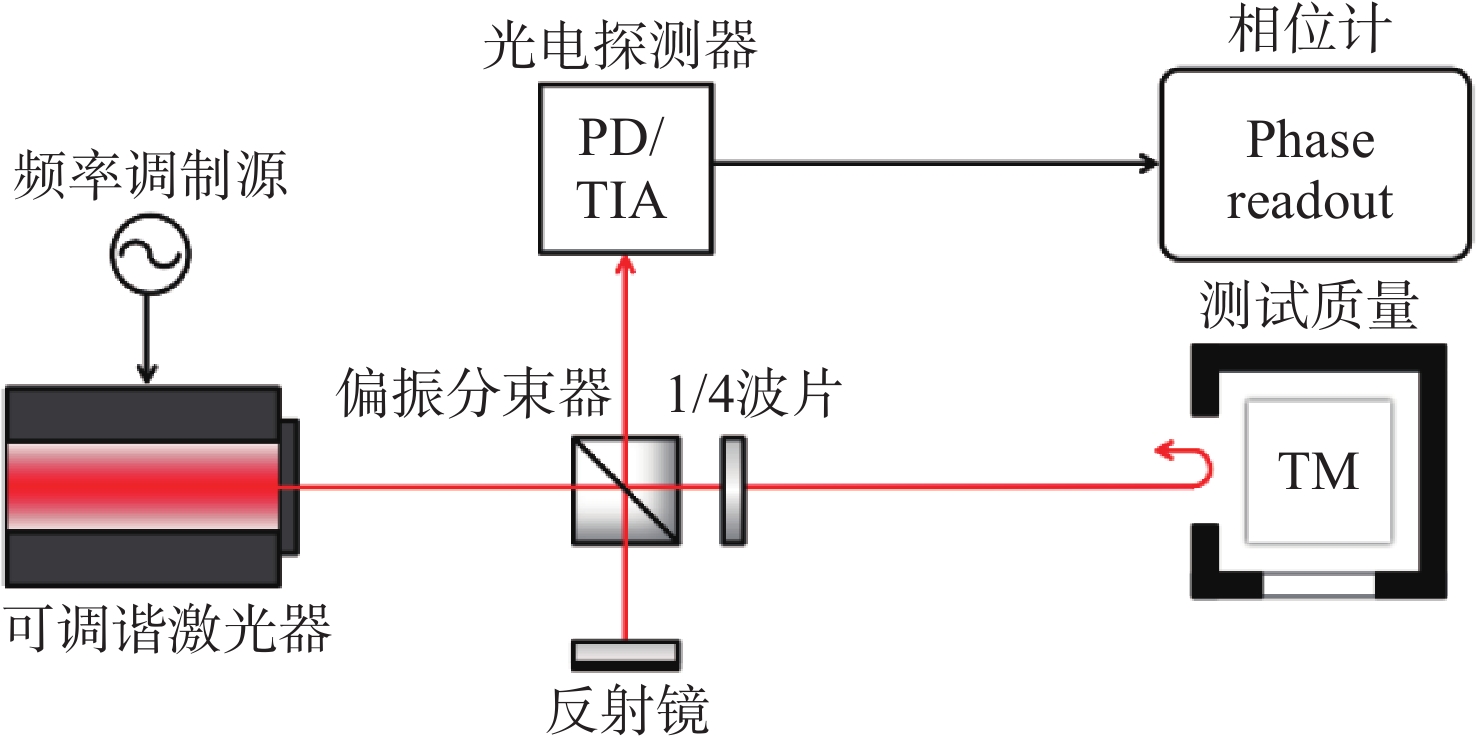
针对空间引力波探测中星内检验质量的高灵敏测量需求,构建了激光外差干涉测量地面模拟系统,开展皮米级平动测量技术研究。首先,开展真空环境下激光外差干涉测量系统的平动灵敏度测试。接着,根据灵敏度结果开展激光外差干涉测量系统噪声溯源研究,分析多种噪声源作用机理、探索主导噪声源消减方案。最后,在噪声溯源分析的基础上完成激光外差干涉测量系统优化。测试结果表明平动测量灵敏度优于1 pm/Hz1/2@30 mHz−1 Hz。该研究有望为空间引力波探测中皮米级激光干涉测量技术的进一步发展提供可靠的噪声溯源地面测试平台。
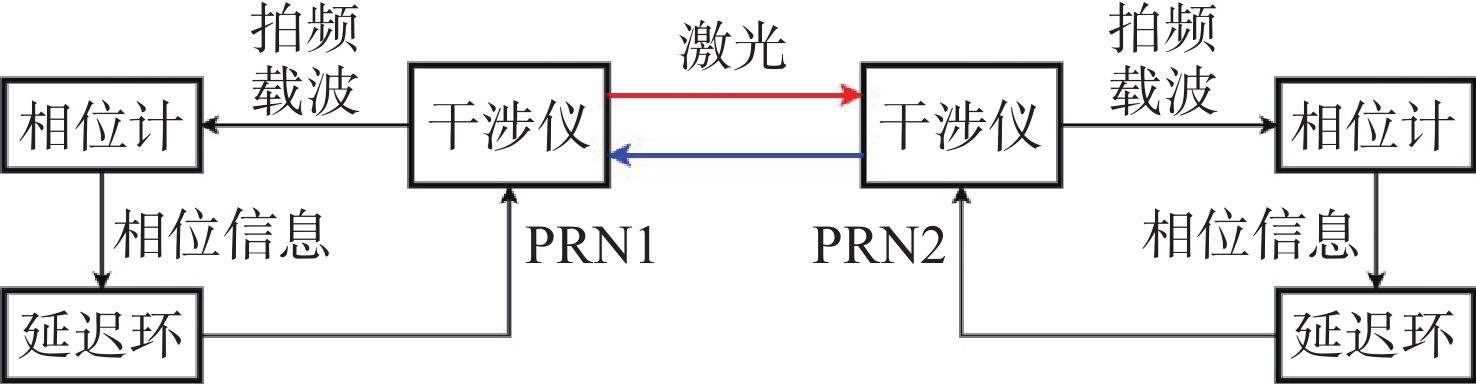
太极计划拟通过扩频通信技术,在干涉链路的基础上,实现星间的激光通信和绝对距离测量。伪随机码的选取是实现通信测距系统的第一步,需对不同的伪随机码的实现原理、相关性、测距误差函数等进行对比分析。本文首先介绍了m序列、Gold序列与Weil序列的生成原理,并采用不同的硬件结构和方法生成相应的伪随机序列,采用GPS的C/A码作为Gold序列与Weil序列进行比较分析选取。在FPGA开发平台实现用于生成Gold序列和Weil序列的硬件电路,并分析不同硬件实现方法的优劣与资源消耗情况。然后,分别计算Gold序列与Weil序列的相关值及其均方根误差,比较Gold序列与Weil序列的伪随机噪声性能。最后,基于测距原理和激光干涉后的码间串扰现象,构建用于测距的误差函数,与理想的误差函数作对比,分析用不同伪随机码测距的优势和劣势。数据表明:Weil序列相关值的旁瓣值范围为−60.27 dB至−24.01 dB、自相关rms为0.303、互相关rms为0.307,指标均优于Gold序列,消耗的硬件资源为Gold序列的30%,误差函数的偏差值更小。Weil序列更适合于太极计划的星间通信测距需求。
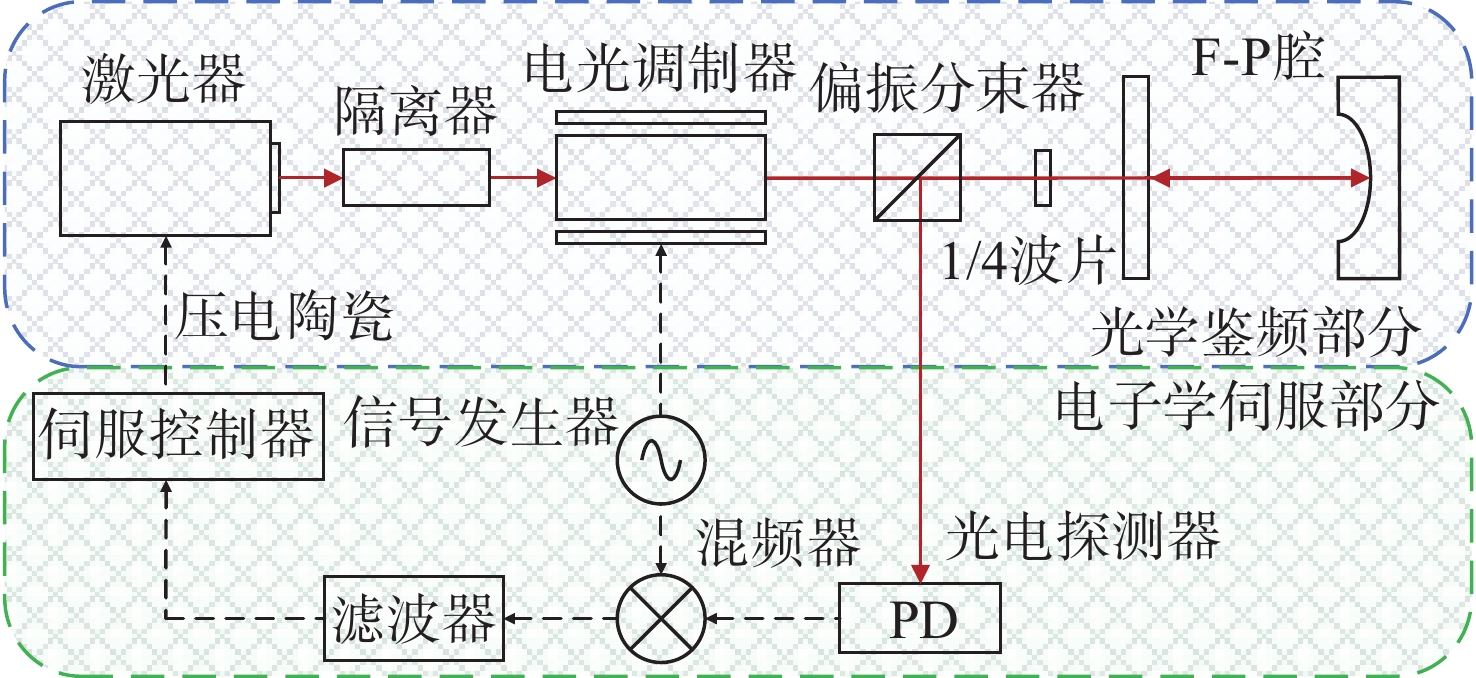
传统Pound-Drever-Hall(PDH)技术使用模拟器件来对激光器进行主动稳频,系统自身体积庞大,控制过程复杂,难以满足空间引力波探测等新型应用场景对稳频系统小型化和自动化的要求。本文针对鉴频信号寻峰特别设计了一种基于后向差分的自动寻峰算法,该方法可以有效减少稳频过程中人为因素的影响。该方法通过比较连续信号峰的时间宽度来完成信号主峰寻找以及控制状态切换,避免了常规阈值法的固有缺陷。在此基础上,设计搭建了一套基于现场可编程门阵列(FPGA)的数字稳频系统。该系统将稳频伺服反馈控制中的各分立部件全部进行数字化并集成到单块FPGA内,构建了以压电陶瓷为执行器的快速伺服反馈环路。稳频系统首先利用幅度解调方法在本地得出鉴频信号,再通过所设计的后向差分算法实现自动寻峰,最终在锁频点处开启伺服控制器,并利用增量式数字PID算法成功将商用Nd:YAG激光器频率锁定到精细度为
为满足空间引力波探测皮米级测距精度的需求,本文提出了一种星间光学测距噪声链路指标优化方法。该方法通过对设计参数进行优化,在确保星间测距精度的同时提高航天器设计方案的技术可行性。首先,明确优化问题的设计参数及目标函数,结合Sobol敏感性分析有效识别出关键参数。随后,采用非支配排序遗传算法(NSGAII)对优化问题进行求解,从帕累托解集中筛选出符合需求的最优方案。在此基础上,确定各参数的设计指标并初步构建指标树。通过仿真实验验证了方法的可行性。结果表明:采用本文方法优化噪声链路指标,能够在满足
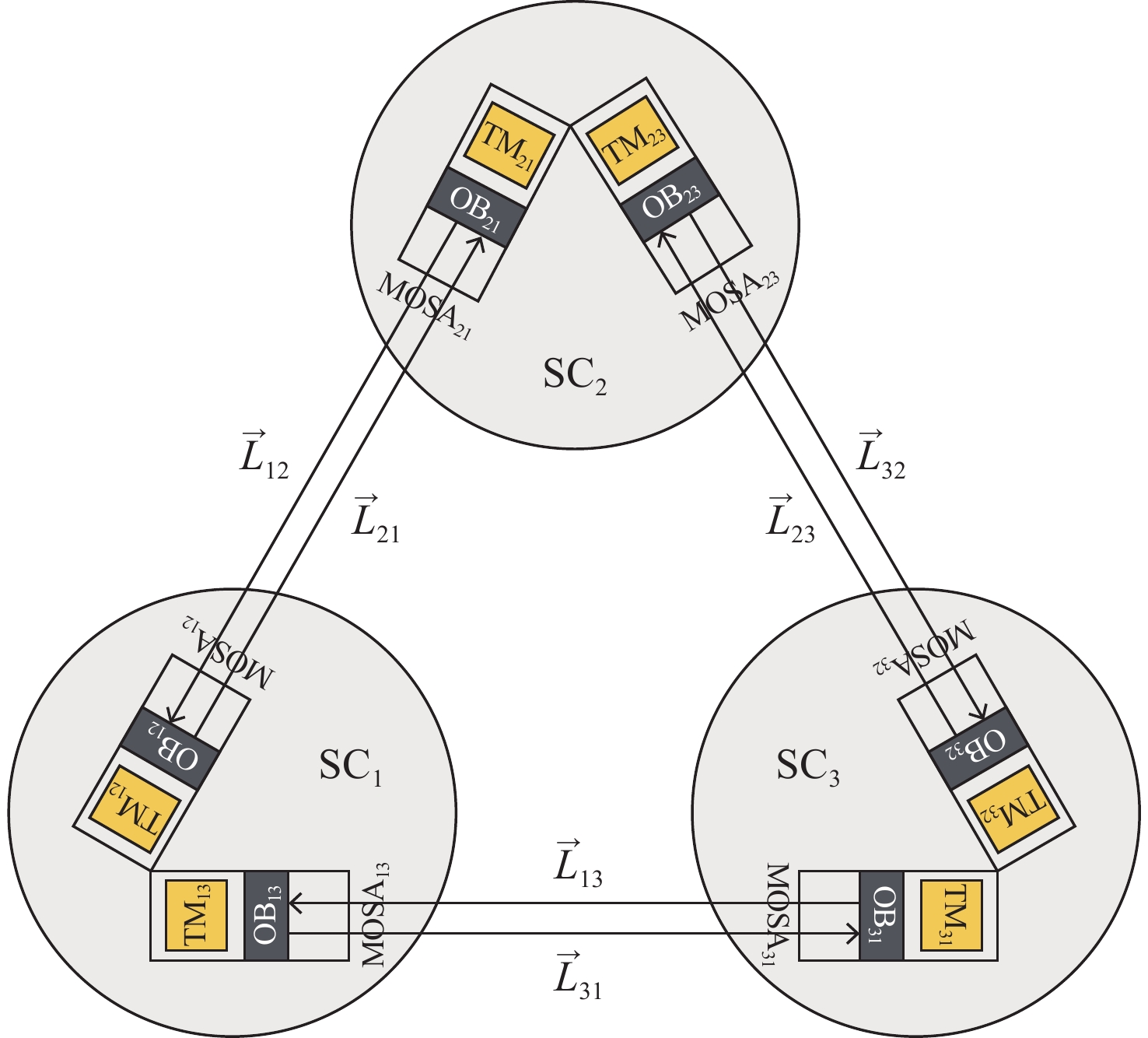
太极空间引力波探测任务采用激光干涉方法测量由引力波引起的皮米尺度距离变化。卫星和可移动光学组件(MOSA)的姿态抖动引起的星间姿态-光程耦合噪声(TTL),将显著降低对引力波信号的灵敏度。为此,需要在数据处理阶段拟合和扣除TTL噪声。本文针对卫星和MOSA的姿态抖动,提出了一种星间TTL噪声抑制算法。首先,对TTL噪声进行一阶线性近似建模,并引入时间延迟干涉(TDI)组合中,得到它在TDI输出中的表现形式;接着,通过比较TDI数据与TDI组合后的TTL噪声模型,建立似然函数;然后,通过极大似然法初步估计TTL耦合系数,从TDI数据中扣除初步拟合的TTL噪声,可估计出残余底噪的统计性质并重新代入似然函数,再次执行TTL耦合系数的极大似然估计;将上述步骤迭代10次,可获得精确的底噪模型;最后,通过马尔可夫链蒙特卡洛(MCMC)方法得到TTL系数的后验分布,完成TTL噪声的精确拟合,从而实现噪声的有效抑制。结果表明,80%以上的系数估计值都在3个标准差内,80%以上的系数估计与真值相差小于0.1 mm/rad。对于不同水平的TTL系数,抑制后的残余TTL噪声都比次级噪声低一个量级,具有一定鲁棒性,尤其适用于底噪模型未知的实际探测场景,满足空间引力波探测需求。
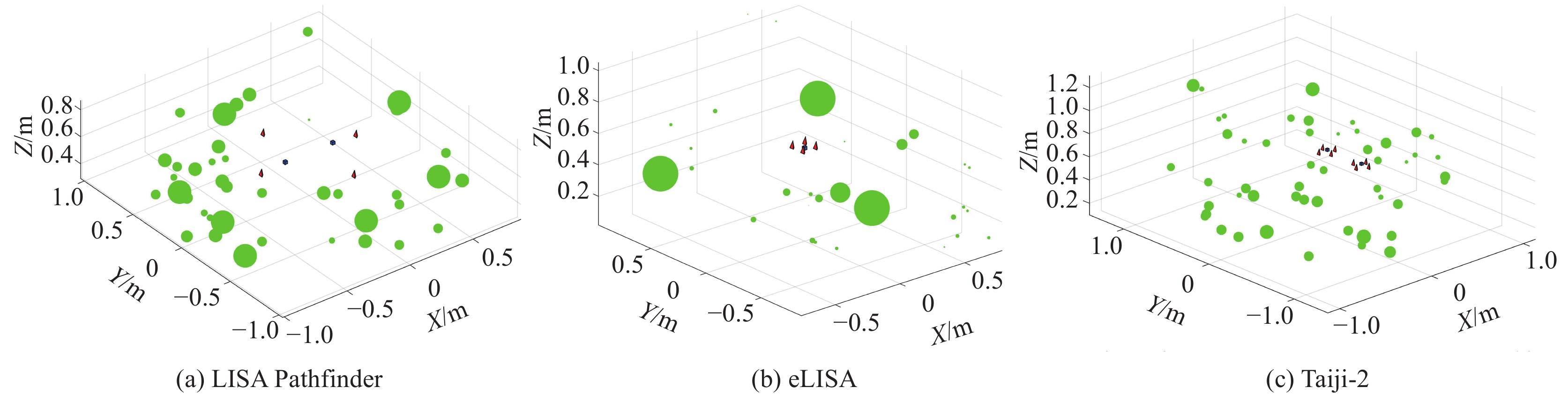
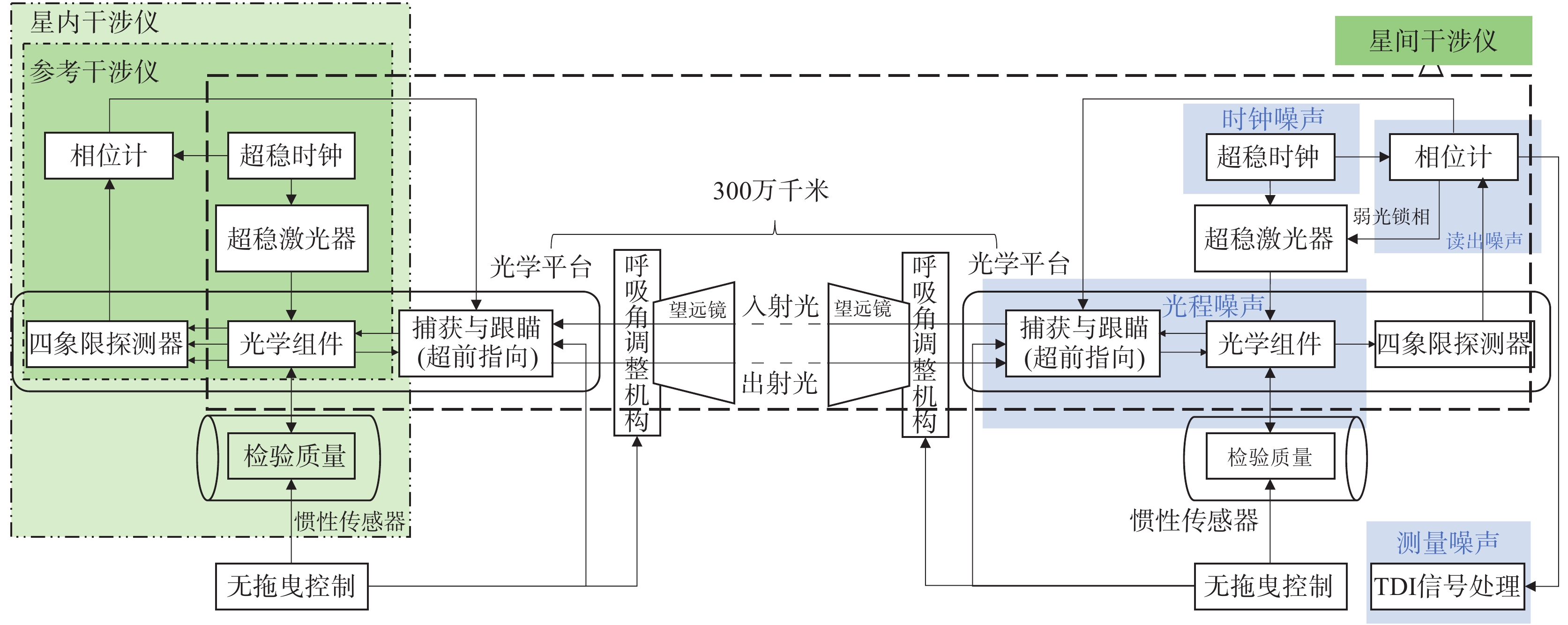
为了精确评估空间引力波探测任务中检验质量所受到的磁场波动、磁场梯度波动噪声,本文提出了多阶段偏差修正模型MSBCM对检验质量处磁场进行精确重建。在集成学习方法的基础上,本文构建了标准全连接神经网络模块和残差全连接神经网络模块作为多阶段偏差修正模型的弱预测模型。每个弱预测模型都将对前序模型的预测偏差进行修正,最终构成强预测模型,实现对检验质量处磁场的精确重建。在对LISA Pathfinder、eLISA和太极二号空间引力波探测航天器的检验质量处的磁场重建实验中,与其他方法相比MSBCM方法在敏感轴方向的平均相对误差最小。模拟在轨实验中,MSBCM方法重建检验质量1敏感轴方向的磁场波动和磁场梯度波动加速度噪声的均方根误差分别为1.68×10−17 (m/s2/Hz1/2)和4.00×10−17 (m/s2/Hz1/2)。此外,MSBCM在重建检验质量2敏感轴方向的磁场波动和磁场梯度加速度噪声的均方根误差仅次于距离加权法,分别为1.72×10−16 (m/s2/Hz1/2) 和2.93×10−16 (m/s2/Hz1/2),充分验证了本文提出方法在评估在轨空间引力波探测检验质量处磁场的优势。
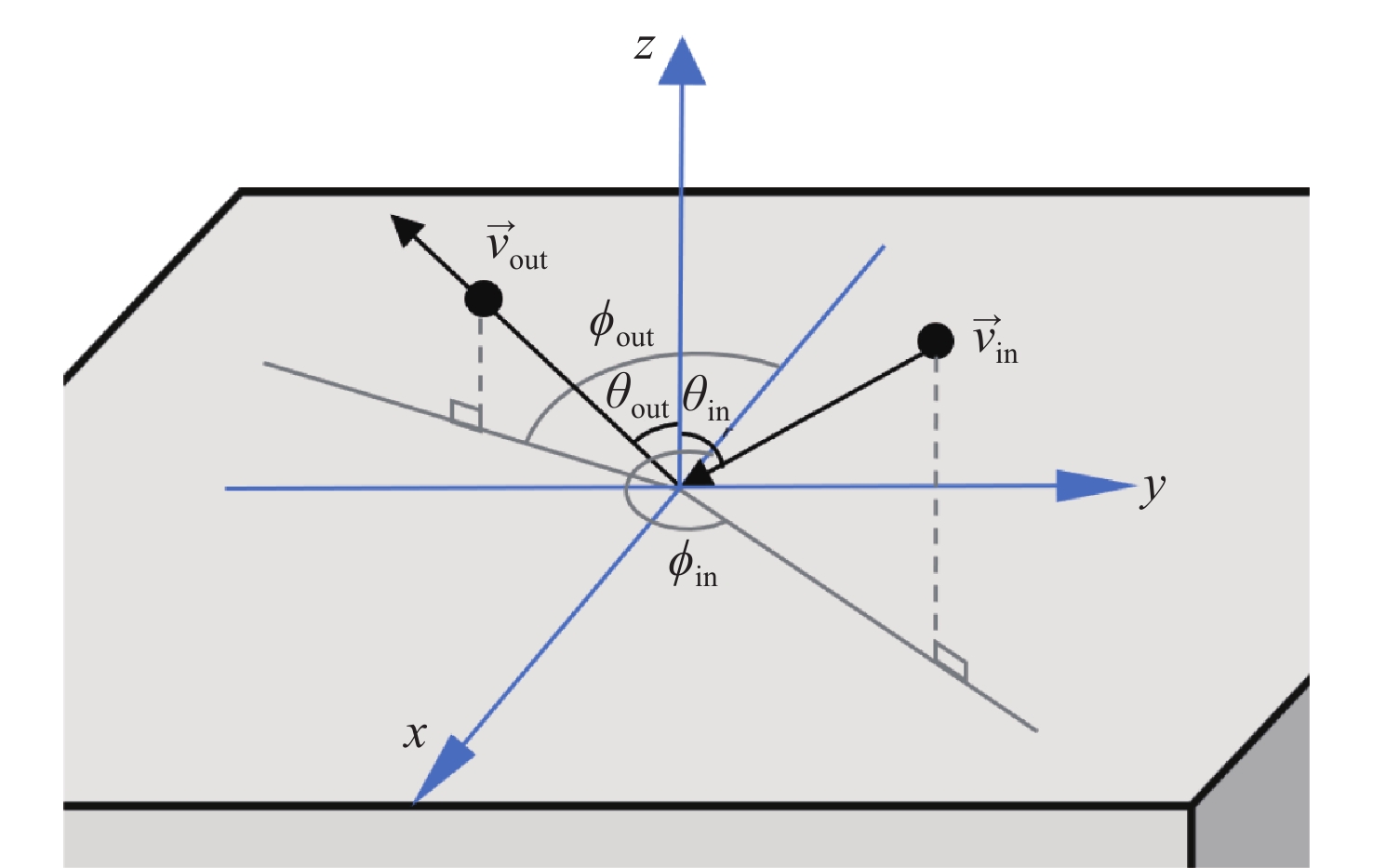
高精度惯性传感器在航天、导航和精密测量等领域具有广泛的应用前景,对其噪声进行高精度评估具有重要意义。本文提出了一种基于Ray Tracing技术的残气噪声仿真方法。首先,基于真实的惯性传感器模型,模拟在轨条件下残余气体在惯性传感器电极笼中的运动,获得残气加速度噪声的统计特性;其次,探究了不同压强和温度对残余气体噪声的影响;最后,分析了敏感轴的残余气体噪声对非敏感轴的间隙大小的依赖关系。仿真结果表明:利用Ray Tracing技术能够模拟追踪残余气体与敏感结构相互作用过程,实现残气加速度噪声在
深度频率调制(DFM)干涉技术是实现空间引力波探测激光干涉测量系统简化的有效方案。当前DFM干涉技术普遍使用kHz级调制,导致激光功率噪声会耦合进入系统,从而增加本底噪声,难以满足高精度空间测量的要求。本文提出将DFM的调制频率提升至MHz量级以减少激光功率噪声的影响。通过深入分析DFM技术原理,采用贝塞尔函数展开、正交解调和推广J1···J4方法设计了DFM干涉相位信号提取方法。基于MHz级信号处理需求,完成了相位测量系统的软硬件构建,并对系统在多种工况下的性能进行测试与评估。测试结果表明:相位测量系统具有良好的线性度和准确度,且在不同工况下,2 mHz ~ 1 Hz频段内的相位噪声均优于 2π µrad/
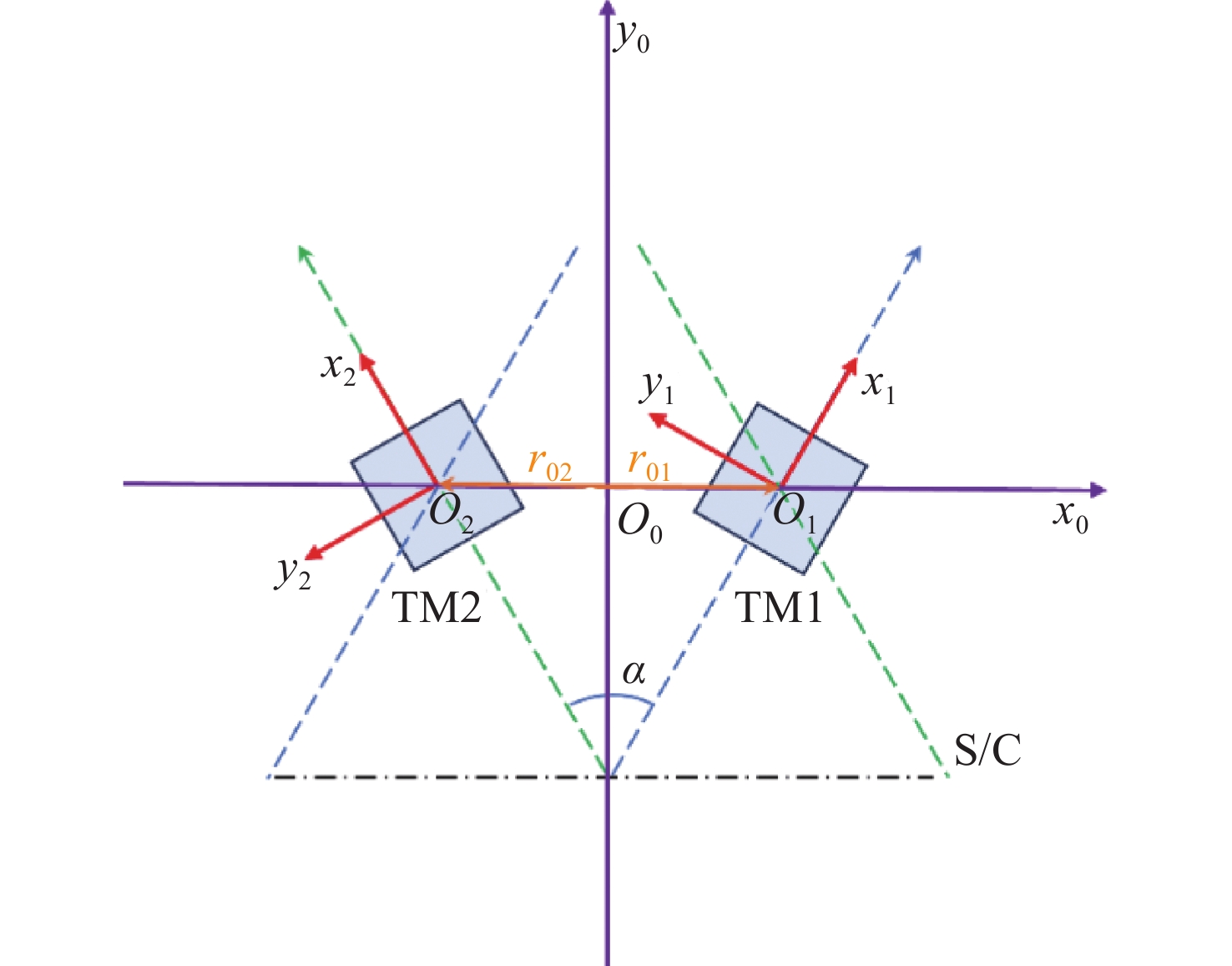
检验质量刚度与位移耦合噪声作为残余加速度噪声的重要组成部分,极大影响空间引力波探测性能,需要辨识刚度以验证、优化控制效果,满足噪声抑制需求。针对非同轴检验质量布局,本文提出了一种基于双敏感轴分解的刚度辨识方法。首先,构建检验质量与航天器间的相对动力学模型,并将模型参数沿双敏感轴分解从而剥离航天器加速度扰动和主要的角加速度扰动对在轨辨识的影响。其次,结合星内激光干涉仪、惯性传感器和相关控制环路,设计在轨辨识方案并提出采用递归最小二乘辨识刚度的方法。最后,开展数值仿真实验以验证方法性能。实验结果表明:本文提出的刚度辨识方法可有效辨识检验质量敏感轴刚度,在给定仿真条件下平均绝对误差小于5×10−9 s−2,均方根误差小于1.5×10−8 s−2,最大稳态误差小于2×10−9 s−2,可应用于后续引力波科学探测任务中。

作为低低跟踪重力卫星GRACE任务的后续任务,激光干涉重力卫星任务GRACE Follow On双星之一的加速度计载荷在运行一个月后出现了异常,造成了关键科学测量数据的缺失,同时在GRACE服役期最后阶段也出现了类似情况。由此,加速度计数据恢复技术对GRACE尤其是GRACE Follow On任务探测目标的实现极为重要。本文提出了一种基于机器学习的回声状态网络模型来实现加速度计数据恢复与重建的全新方法。基于回声状态网络模型,构建双星之间加速度计数据的映射关系,并通过贝叶斯优化提高网络性能,可实现对缺失加速度计数据的高精度高效率重建。通过实测数据的实验比对,在重力场探测信号频段,模型预测结果在沿轨道方向和径向两个高灵敏轴可达到(甚至部分频段优于)
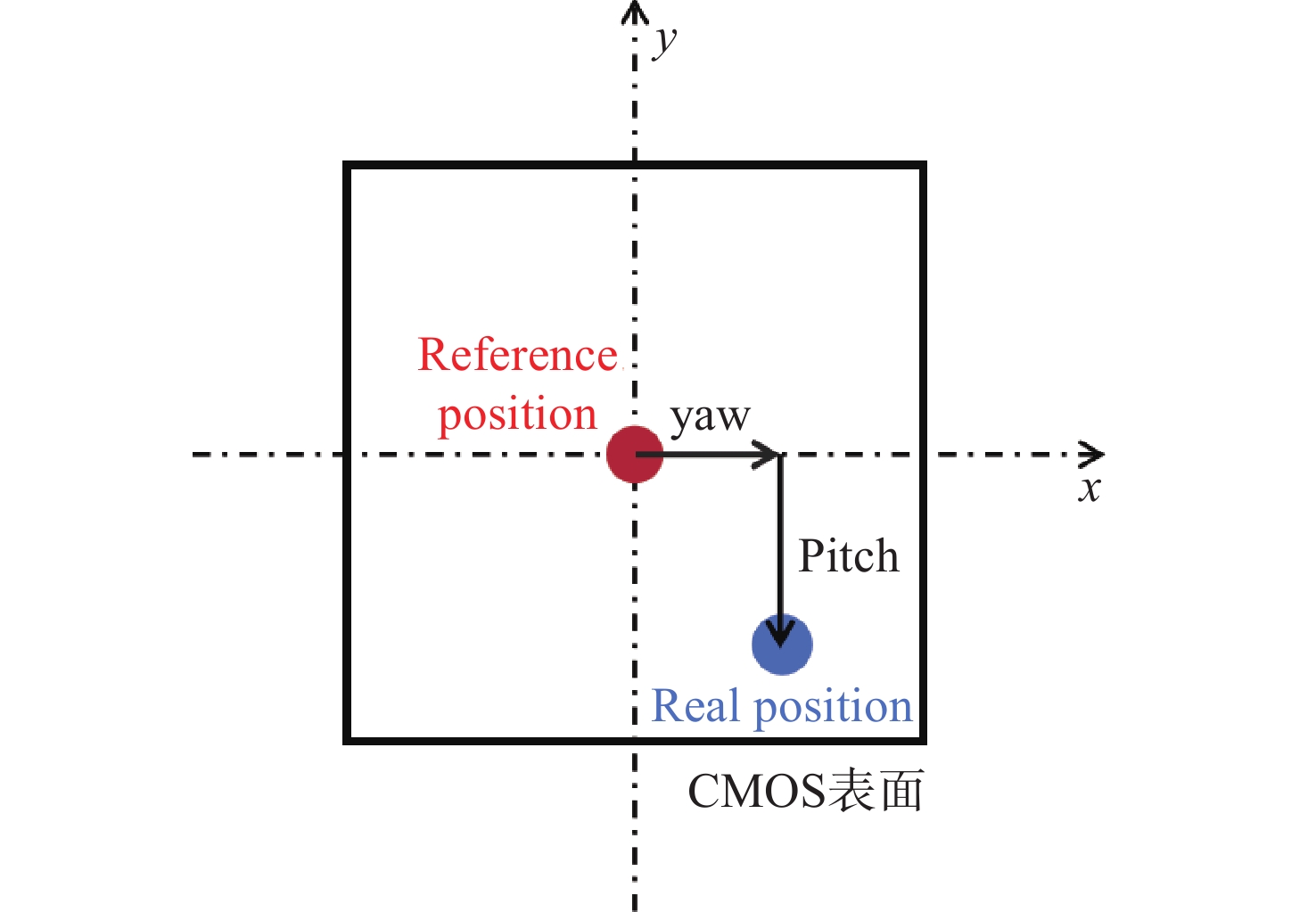
空间引力波探测需要利用激光捕获技术构建星间激光链路,光斑中心定位是激光捕获阶段的核心测量技术。以太极计划为例,光斑中心定位精度要求优于0.1 pixel,由于传输距离较长,探测器表面的接收激光强度仅为100 pW量级,在低信噪比情况下大多数传统定位方法的精度受到很大影响。因此,研究探测器噪声如何影响光斑中心定位精度至关重要。针对上述问题,本文首先说明了激光捕获指向技术原理,然后理论分析了CMOS背景噪声影响光斑中心定位精度的机制,并介绍了一种改进的光斑中心定位算法。最后通过实验,测量了不同系统参数与CMOS背景噪声的耦合关系。实验结果与理论分析结果相符,验证了噪声模型的正确性,证明这种算法能在弱光情况下达到0.018 pixel的测量精度。
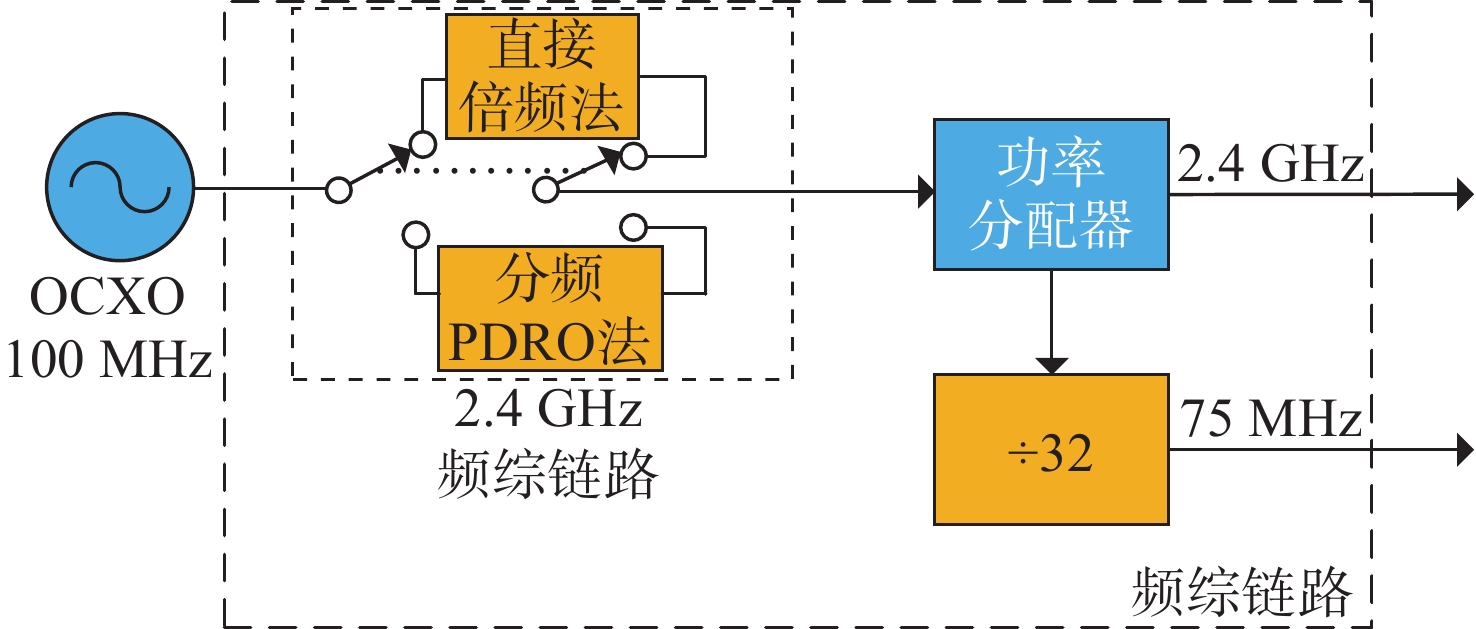
基于激光干涉的空间引力波探测对毫赫兹频段内的时钟噪声抑制水平提出了极高要求,通常通过边带倍频时钟噪声传递和导频音等技术来抑制时钟噪声。针对时钟噪声抑制技术需要的超低附加相噪的电光调制器(EOM)调制微波(2.4 GHz)和导频音射频信号(75 MHz),本文设计、搭建并比较了两种微波合成链路。通过低相噪锁相介质振荡器(PDRO)、分频等技术,实现了超低附加相噪频综。经测量,75 MHz导频信号在0.1 mHz、1 mHz、10 mHz、100 mHz、1 Hz处相对应的残余相噪分别为
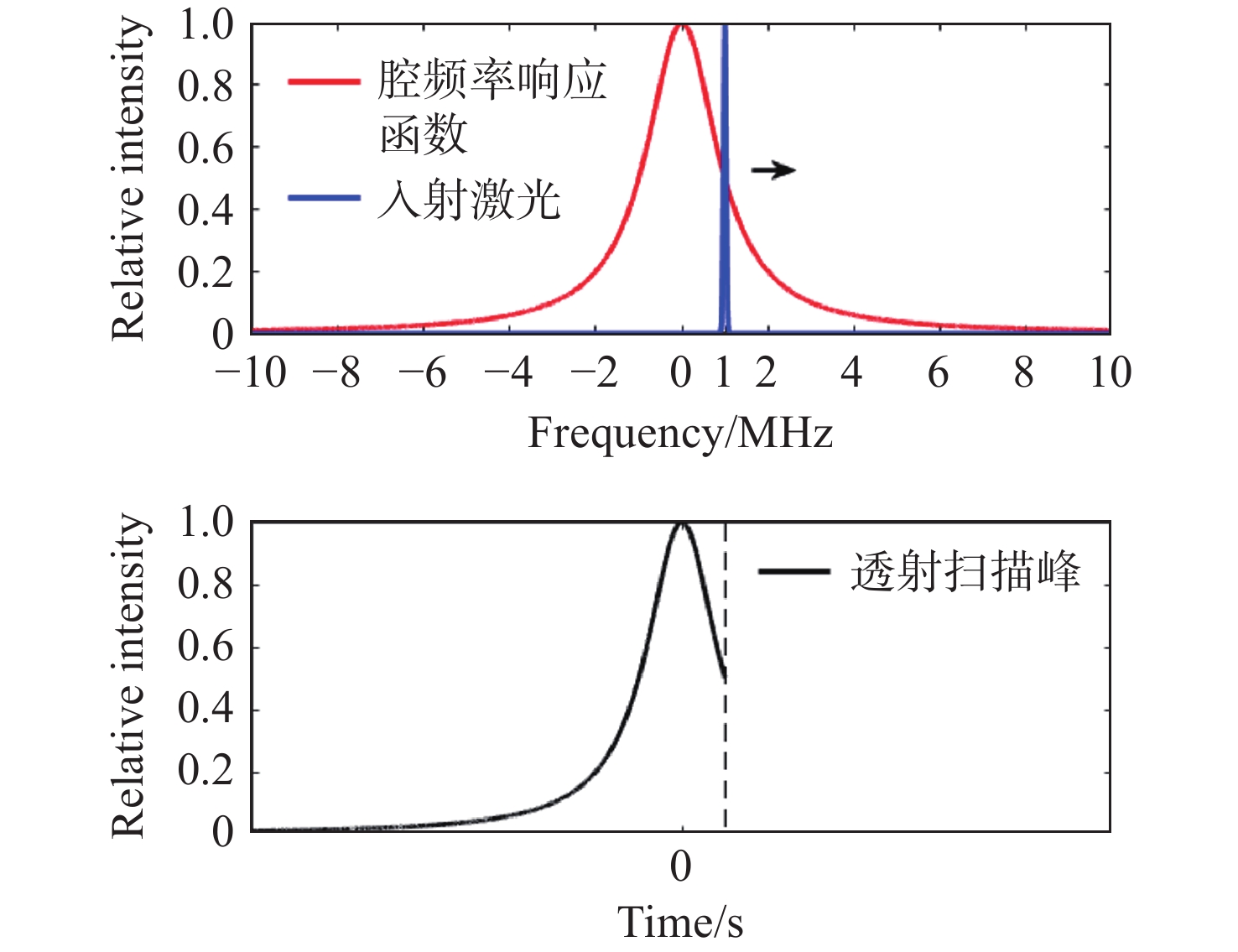
针对传统扫频法因激光线宽引入的测量误差,基于激光光谱(高斯型)与法布里-珀罗(F-P)谐振腔(洛伦兹型)的卷积特性,提出了基于卷积拟合的信号分析方法,搭建了扫频实验平台,对自制F-P腔(1号腔)和进口F-P腔(2号腔)进行验证。首先,结合仿真分析量化了激光线宽对信号轮廓的影响,并介绍了拟合算法的主要流程。其次,通过拍频对入射激光光谱进行测量。实验结果表明其光谱呈高斯形,线宽为 (11.59±1.23) kHz。接下来,评估了扫频平台的频率调制误差,使用扫频法对两台F-P腔进行了线宽测量,并对比了洛伦兹拟合与卷积拟合结果,其中,1号腔的洛伦兹与卷积拟合结果分别为 (204.1±11.2) kHz和 (203.9±11.2) kHz,差异不显著。2号腔的标定线宽为4.17 kHz,洛伦兹拟合的结果为 (8.97±0.42) kHz,卷积拟合的结果为(4.42±0.50) kHz。实验结果表明,当激光线宽与腔的线宽相近时,本方法能够准确地测量出腔的真实线宽,当激光线宽(11.59 kHz)远小于腔的线宽(204.1 kHz)时,本方法的结果与洛伦兹拟合方法相近。本工作为窄线宽F-P腔线宽测量提供了更多选择。
为了解决光束与法布里珀罗腔的入腔失调问题,本文基于谐振模式能量梯度上升自适应调整双反射镜步进,实现所需谐振模式的入腔光束指向。首先,利用双反射镜步进与入腔光束失调的关系,提出分离式入腔光束平移与角度调整方法。其次,利用EfficientNET神经网络对谐振模式图片进行分类,实现不同激光模式的图像识别。最后,利用腔后模式能量梯度调整双反射镜步进,低成本、高效率实现目标谐振模式的入腔耦合。本文的入腔光束指向调整方法为超稳激光器以及引力波探测中法布里珀罗腔的入腔耦合提供了新思路。
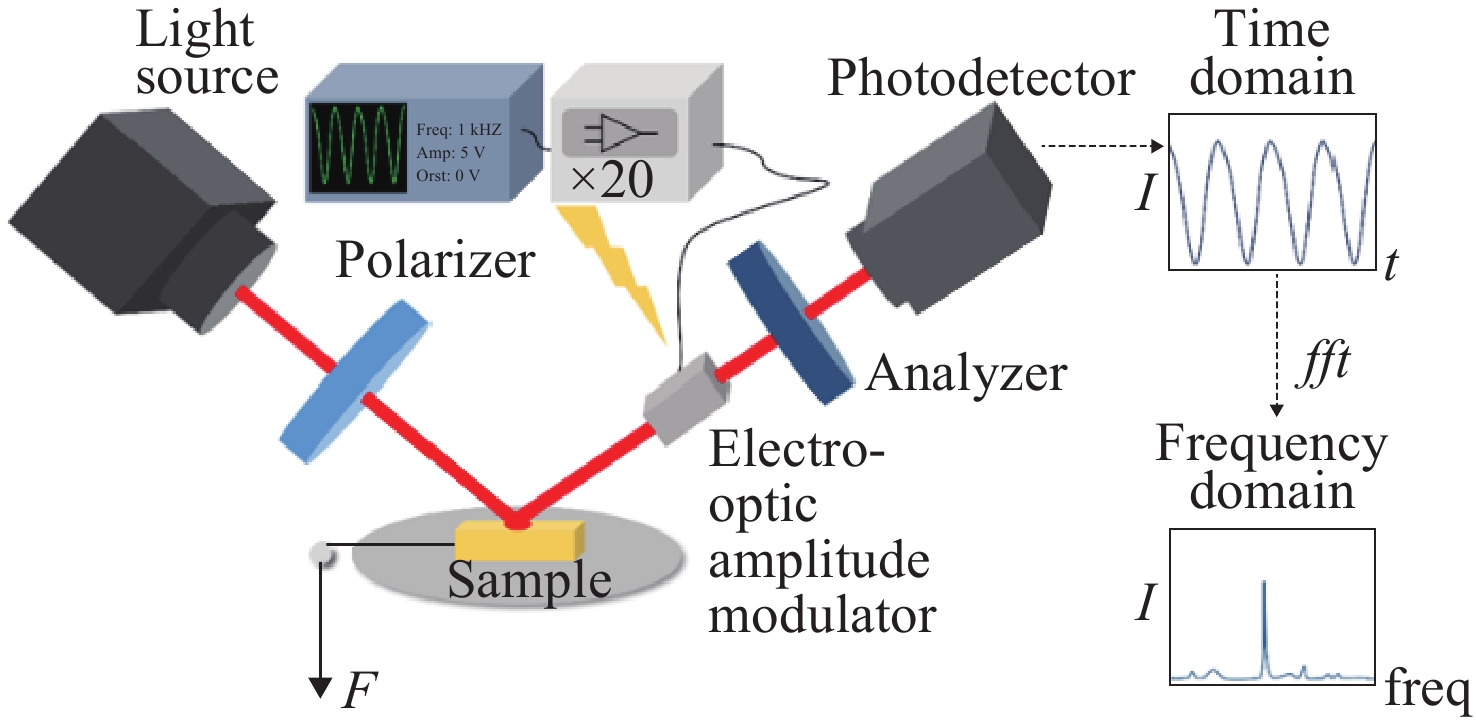
为了实现精密制造中关键部件残余应力的高精度检测,建立了电光调制椭偏应力传感系统,并对工程中常见的304不锈钢材料在单轴拉伸应力条件下的椭偏信号响应进行了研究。首先,基于反射椭偏的基本原理,建立了不同光轴方向上椭偏信号与单轴拉伸金属试样寻常折射率和异常折射率的关系。其次,针对不锈钢材料,优化了椭偏应力传感的工作点。通过对比消光点和非零线性工作点的椭偏信号,证明了非零线性条件适用于应力信号的传感。最后,对不同光轴方向下,由应力引起的椭偏信号进行测量。实验结果表明:针对304不锈钢,系统的最低应力检测限为7.84 kPa,系统的应力检测精度优于7.84 kPa。该系统可用于精密制造中,满足金属工件高精度应力检测的要求。
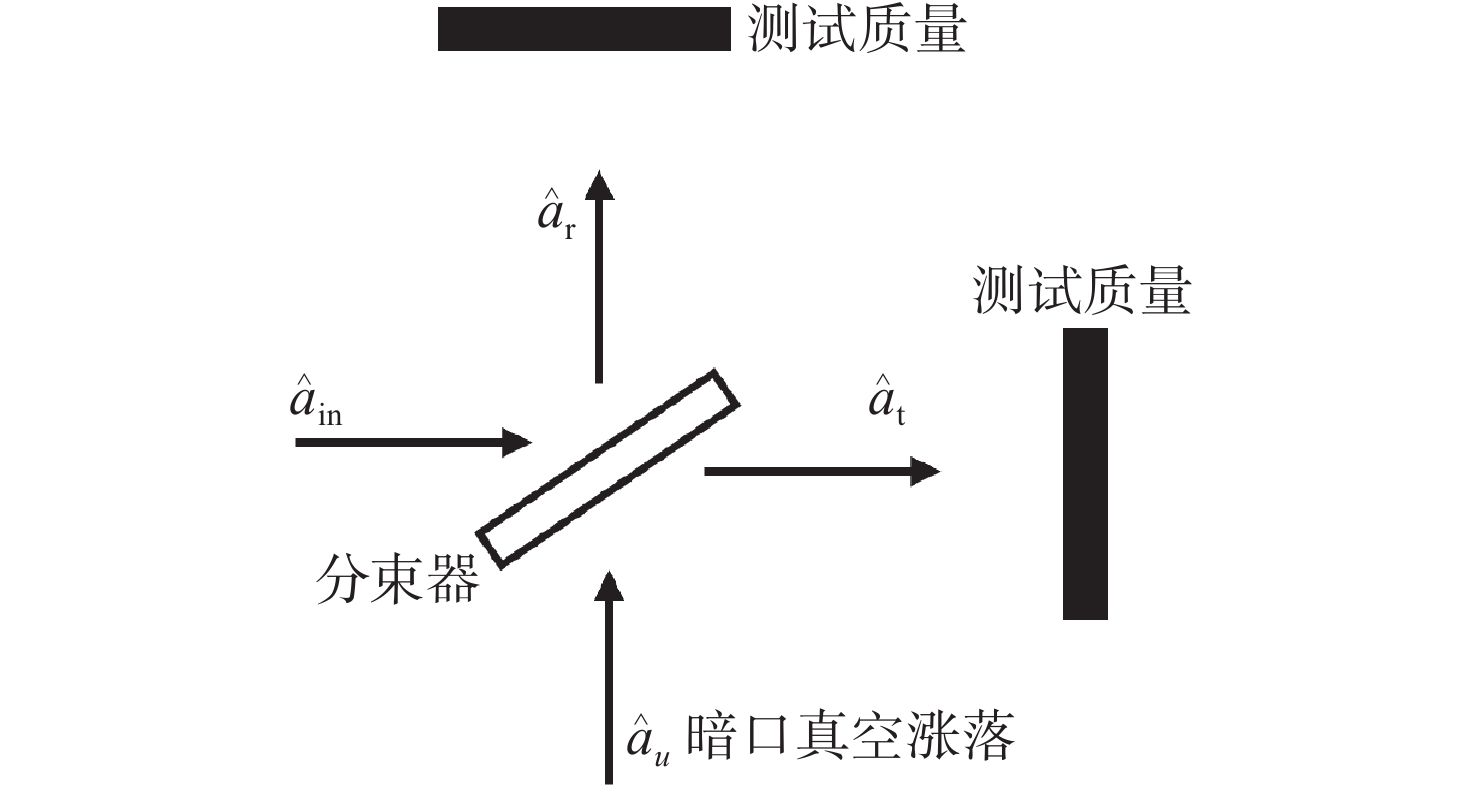
量子噪声是影响激光干涉引力波探测能力的主要噪声之一。为应对量子噪声,进一步提高探测灵敏度,本文应用量子传递函数方法对传统迈克尔逊干涉仪的量子噪声源头进行了重新推导。结果表明,对于辐射压噪声和散粒噪声这两类量子噪声,前者可直接归因于干涉仪暗口处真空涨落的正交振幅涨落,后者则仅在一定条件下可完全归因于暗口处的正交相位涨落。在明确量子噪声的源头归属前提下,压缩光技术可提高探测器的灵敏度,但当采取不等臂干涉探测方案时,必须注意两不等臂臂长之间的长度差异。
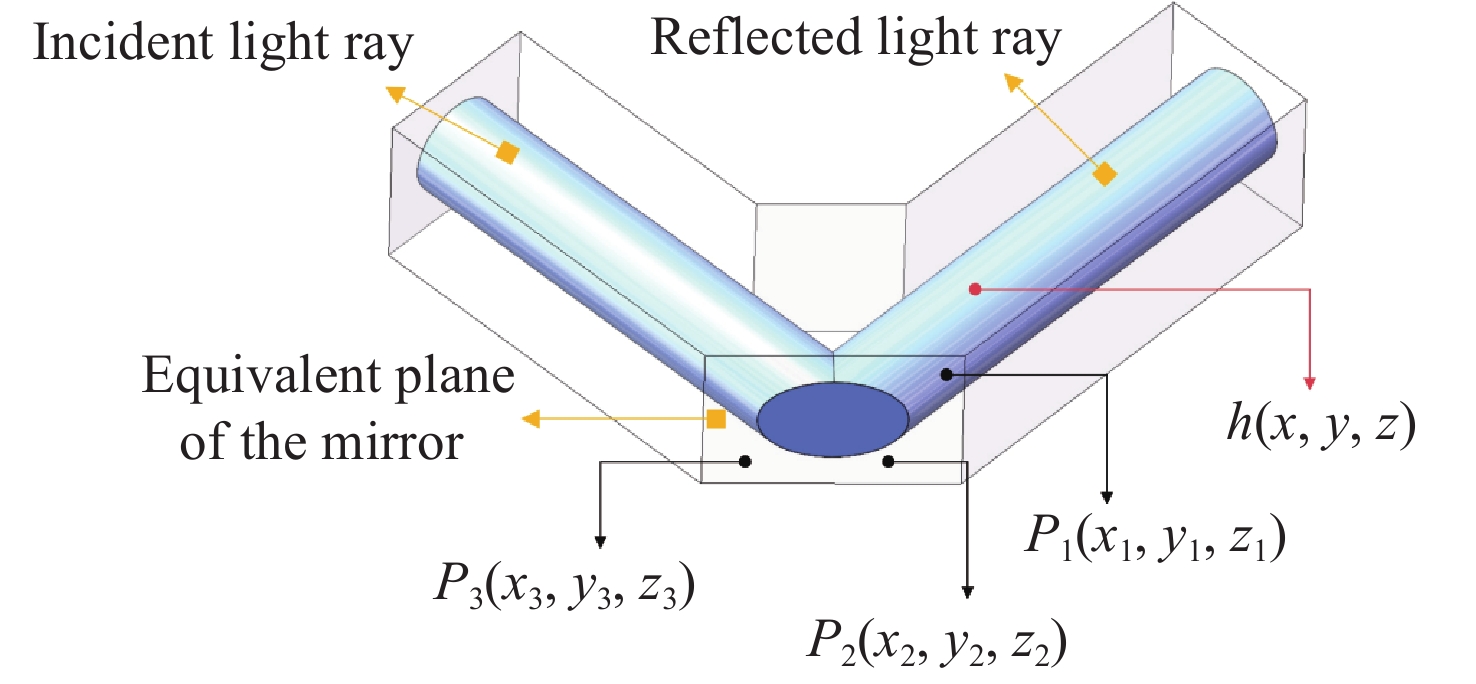
在基于外差干涉原理的空间引力波探测任务中,抖动光程耦合噪声是一个重要的光学噪声源,对测量系统的精度具有显著影响。本文提出了一种多因素共同作用下抖动光程耦合噪声分析的方法。首先,设计了一个等效的测试质量干涉仪仿真光学平台,并采用高斯光束追踪模拟光束传播。通过模拟干涉信号,可以分析各种因素对抖动光程耦合噪声的影响,包括位置因素、光束参数因素、探测器参数因素和信号定义因素。在此基础上,在满足分析要求的参数范围内,构建了由多个影响因素组成的随机参数空间,并通过基于方差的全局敏感性分析对随机采样得到的模拟结果进行评估。主要效应指数和总效应指数的计算结果表明,测试质量的旋转角度和活塞效应(径向)对测试质量干涉仪中的抖动光程耦合噪声有显著影响。这一结论为空间激光干涉测量系统的设计和优化提供了定性参考。
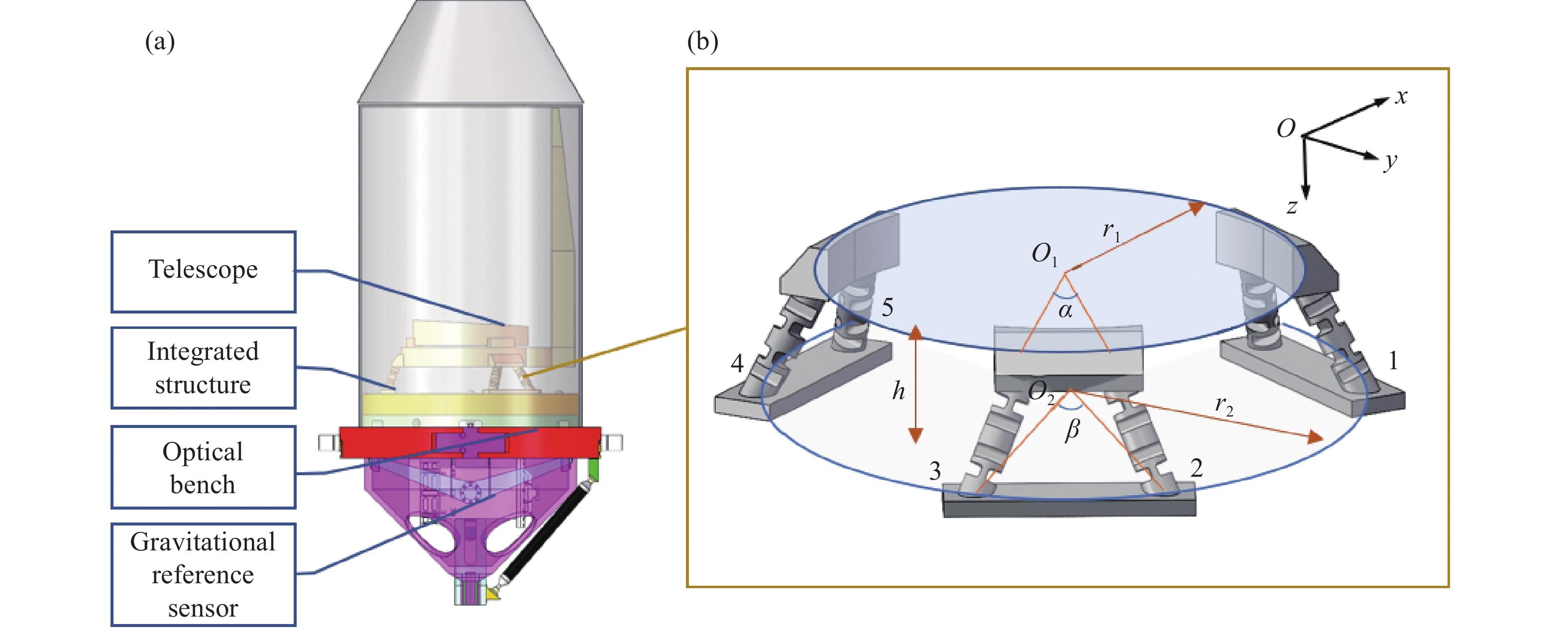
为了实现超低频段空间引力波的探测,望远镜和光学平台的集成结构需要具有极高的稳定性和可靠性。然而,望远镜悬臂梁式的设计对集成结构的研制提出了重大挑战,特别是对于依赖于玻璃-金属异质键合的粘接结构。为了应对这些挑战实现望远镜系统的高可靠性研制,本研究对集成结构粘合层进行了设计、分析和实验研究。研究表明,J-133粘合剂在粘接层厚度为0.30 mm、金属基板的表面粗糙度为Ra 0.8时具有最佳性能。这些发现显著提高了光学系统的可靠性,同时最大限度地降低了潜在风险。

















































































- 2025 2期 1期
- 2024 6期 5期 4期 3期 2期 1期
- 2023 6期 5期 4期 3期 2期 1期
- 2022 6期 5期 4期 3期 2期 1期
- 2021 6期 5期 4期 3期 2期 1期
- 2020 6期 5期 4期 3期 2期 1期
- 2019 6期 5期 4期 3期 2期 1期
- 2018 6期 5期 4期 3期 2期 1期
- 2017 6期 5期 4期 3期 2期 1期
- 2016 6期 5期 4期 3期 2期 1期
- 2015 6期 5期 4期 3期 2期 1期
- 2014 6期 5期 4期 3期 2期 1期
- 2013 6期 5期 4期 3期 2期 1期
- 2012 6期 5期 4期 3期 2期 1期
- 2011 6期 5期 4期 3期 2期 1期
- 2010 6期 5期 4期 3期 2期 1期
- 2009 6期 5期 4期 3期 2期 1期
- 2008 1期