


Target localization with intersection measurement for airborne electro-optical platform
-
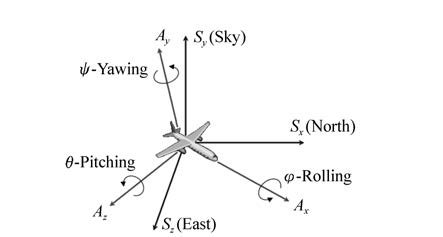
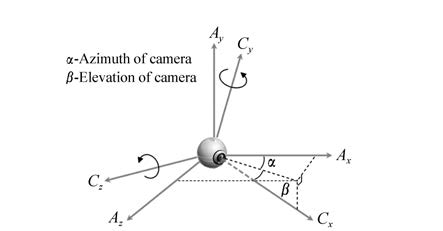
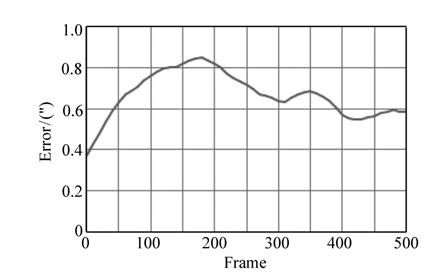
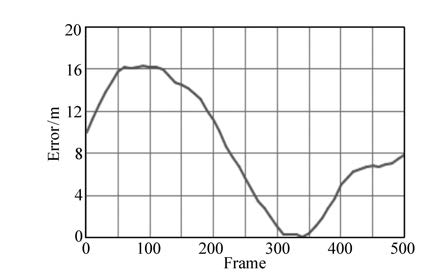
摘要: 根据直线交会测量原理,构建了机载光电平台目标定位数学模型。首先建立5个坐标系,确定了坐标系之间的变换关系,在地心直角坐标系下,根据光电平台观测目标的方位和俯仰角度参数,结合飞机的位置和姿态测量参数,通过坐标变换确定从光电平台到目标之间的观测直线方程。选择一组目标观测直线建立目标交会测量目标函数,根据最小二乘原理,建立关于直线交会点坐标的线性方程组。解出直线交会点的三维坐标并根据从地心直角坐标系到大地地理坐标系的变换关系,计算目标的大地经纬度和高程坐标,通过样本数据进行交会定位精度实验。实验结果表明,本文方法定位结果和实际测量数据接近,经度误差为0.65",纬度误差为0.82",高程误差为5 m,验证了本文方法的准确性。本文方法有效可行,对机载光电平台目标定位具有实用价值。Abstract: Based on the principle of the intersection measurement, the mathematical model of measuring the target localization for airborne electro-optical platform(EOP) is established. Firstly, five coordinate systems are performed and transformations of different coordinate systems are given. Under the geocentric coordinate system, with the measurements of EOP pose angles, the aircraft position and the aircraft attitude, the mathematical expression of straight line segment between the EOP and the target point can be determined based on the transformation of coordinate system, some of which have been used to define an objective function of intersection measurement. In order to estimate the geodetic coordinate of the target, least squares(LS) algorithm is used to minimize the objective function. The matrix equation about 3D geocentric coordinate of target can be computed to be determined, solving this matrix equation and transforming from geocentric coordinates system to geodetic coordinates system, and the estimate of the geodetic coordinates of the target can be obtained. Finally, the intersecting localization experiment is performed on a measurements sample. The result shows that the intersecting location is close to the true target location, the RMS of longitude is 0.65", the RMS of latitude is 0.82" and the RMS of altitude is 5 m. This method is efficient and will be useful to localization of target for airborne EOP.
-
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] -

 下载:
下载:





图(8) / 表(1)
计量
- 文章访问数: 1945
- HTML全文浏览量: 559
- PDF下载量: 681
- 被引次数: 0
