


Panoramic peripheral vision imaging and display technology based on a deformation eyepiece and OLED
-
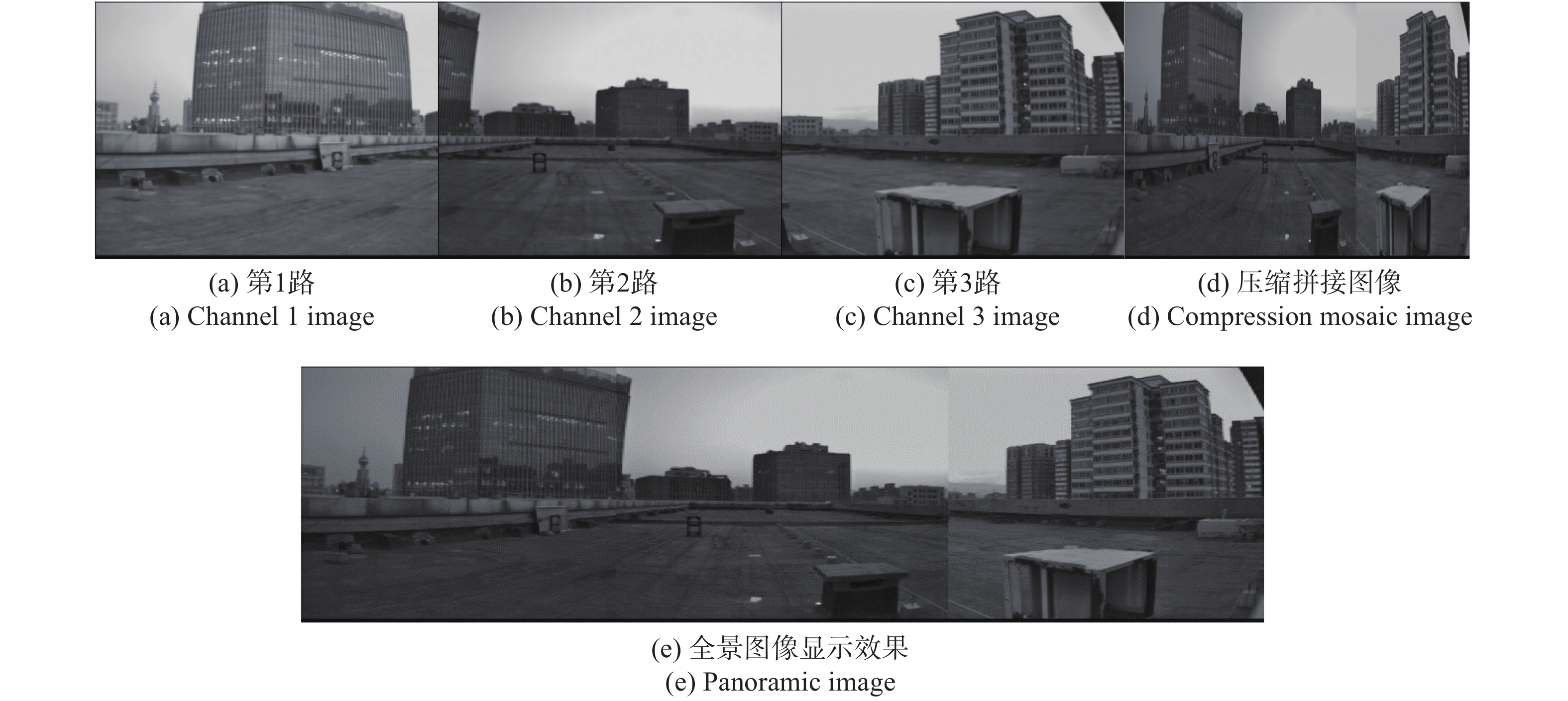
摘要: 在车载、舰载等运动载体或单兵警戒值守等狭窄空间,传统显示方法难以兼顾显示视场与显示分辨率。针对该问题,本文研究了一种基于变形目镜的全景/周视成像技术与系统。系统采用3路低照度摄像机+4 mm焦距镜头,构成150°左右的全景成像视场,基于FPGA处理平台完成全景图像解析、拼接、校正和显示等算法,实现视频图像大视场拼接与1/3缩放实时显示;由OLED微显示器、变形目镜组和大目镜组成的显示系统使视频图像横向扩大3倍,实时显示全景高分辨动态场景图像。实验系统对全景成像显示技术进行了验证,在军用和民用领域具有广泛的应用前景。Abstract: In narrow spaces, vehicles, carriers or for single guards on duty, traditional displays have a dilemma wherein it is difficult to balance a display’s field of view and its resolution. This paper studies panoramic/periodic imaging technology and a system based on deformable eyepieces, which is expected to provide a technical solution to effectively solve the above problems. The system uses three low-light cameras with 4 mm focal length lens to form a panoramic imaging field of view of 150°. Panoramic image analysis, stitching, correction, and display are carried out by adopted FPGA processing platform. It also has a real-time zoom display; a display system consisting of OLED micro-displays, an anamorphic eyepiece group and large eyepiece enlarges the video image horizontally by a factor of 3 and displays a panoramic high-resolution dynamic scene image in real time. The experiment verifies the feasibility of a day and night panoramic imaging display. The system has a wide array of possible applications inside and outside of the military.
-
Key words:
- panoramic imaging and display /
- FPGA /
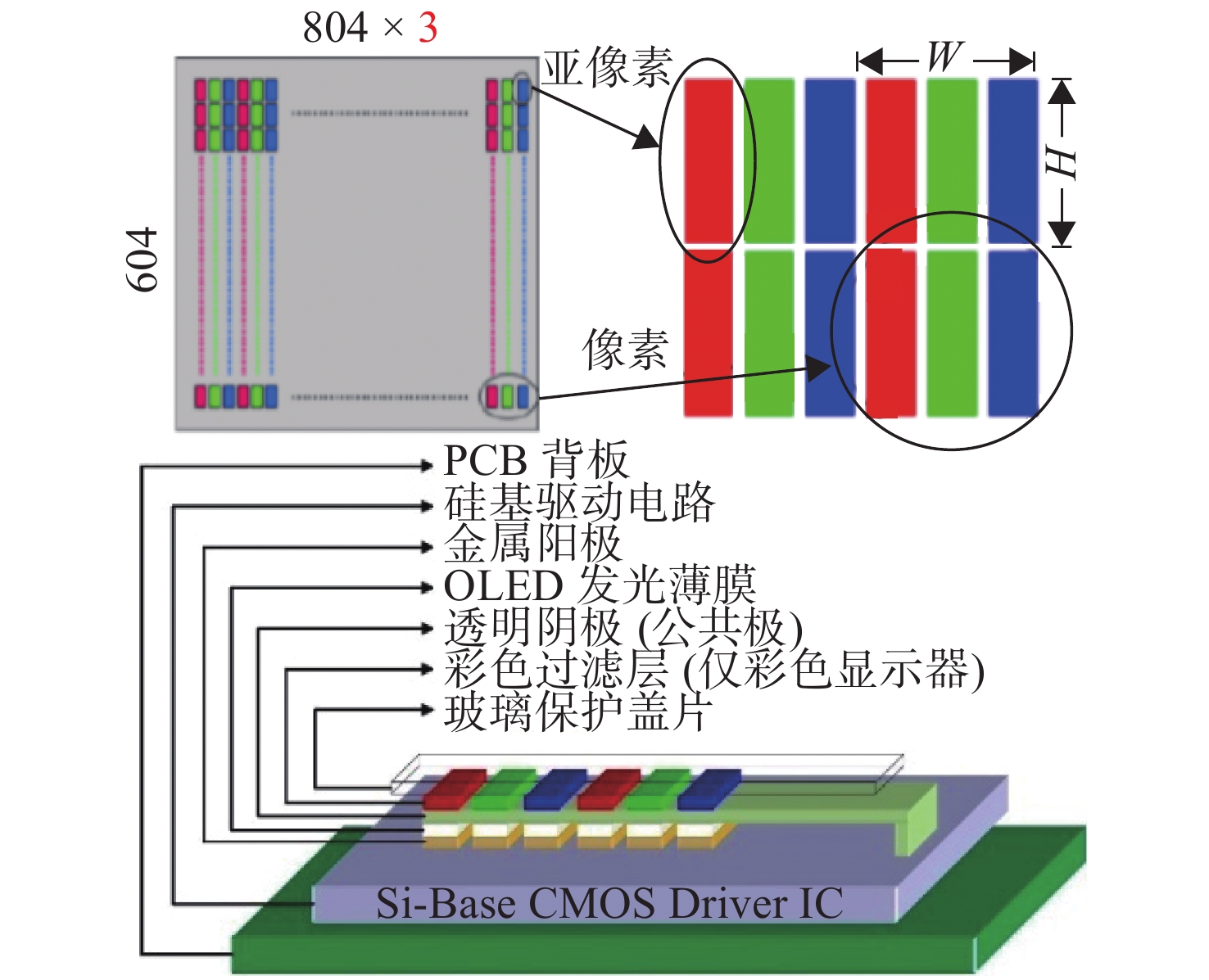
- OLED /
- anamorphic eyepiece /
- image stitching
-
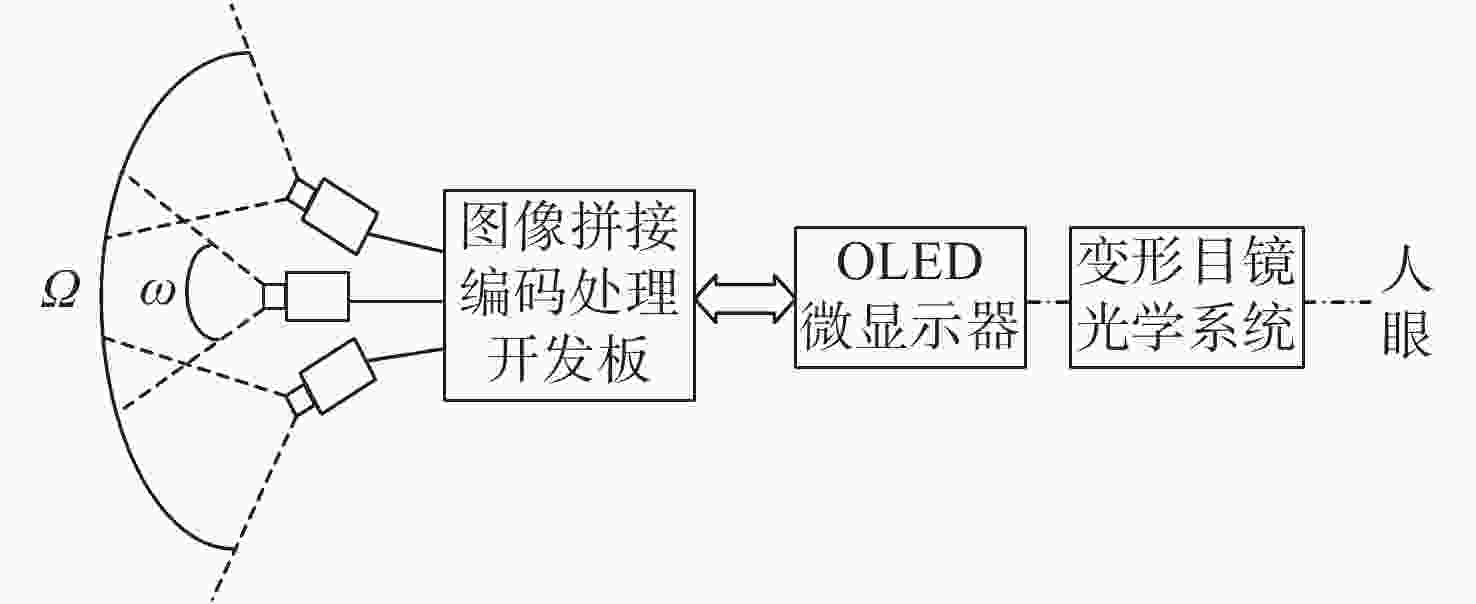
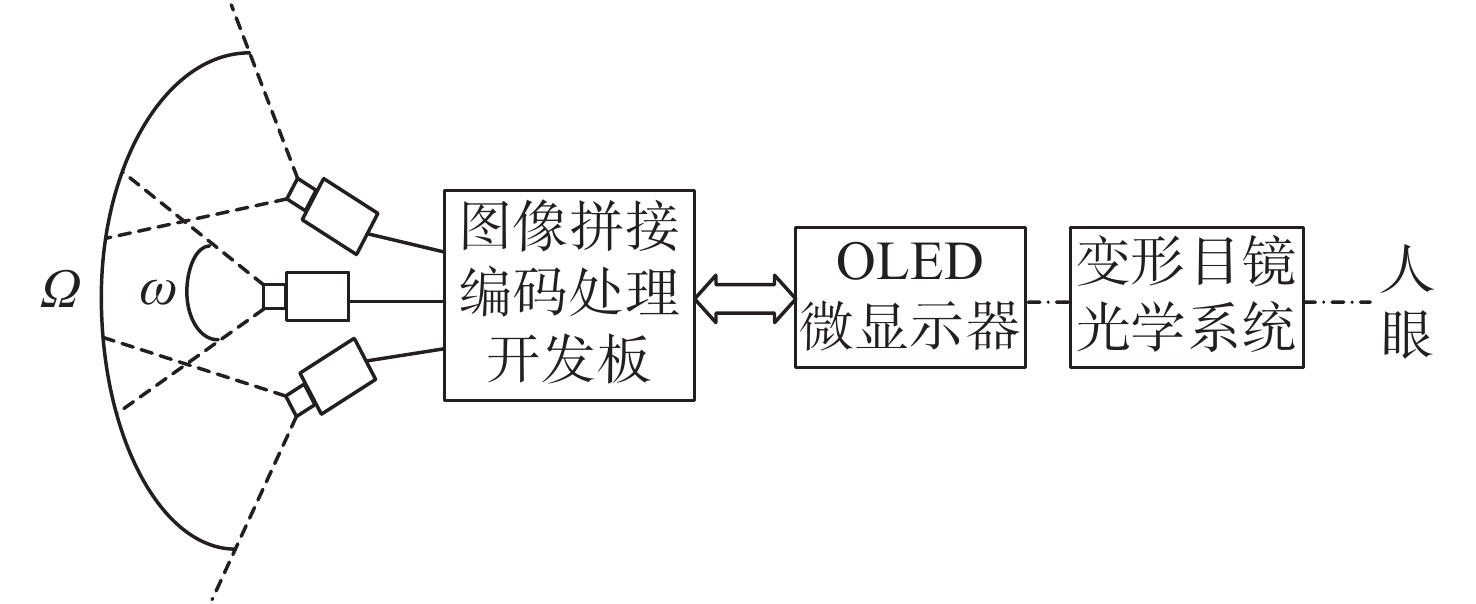
图 1 全景周视成像与显示系统整体框图
Figure 1. Overall block diagram of panoramic peripheral vision imaging and display system
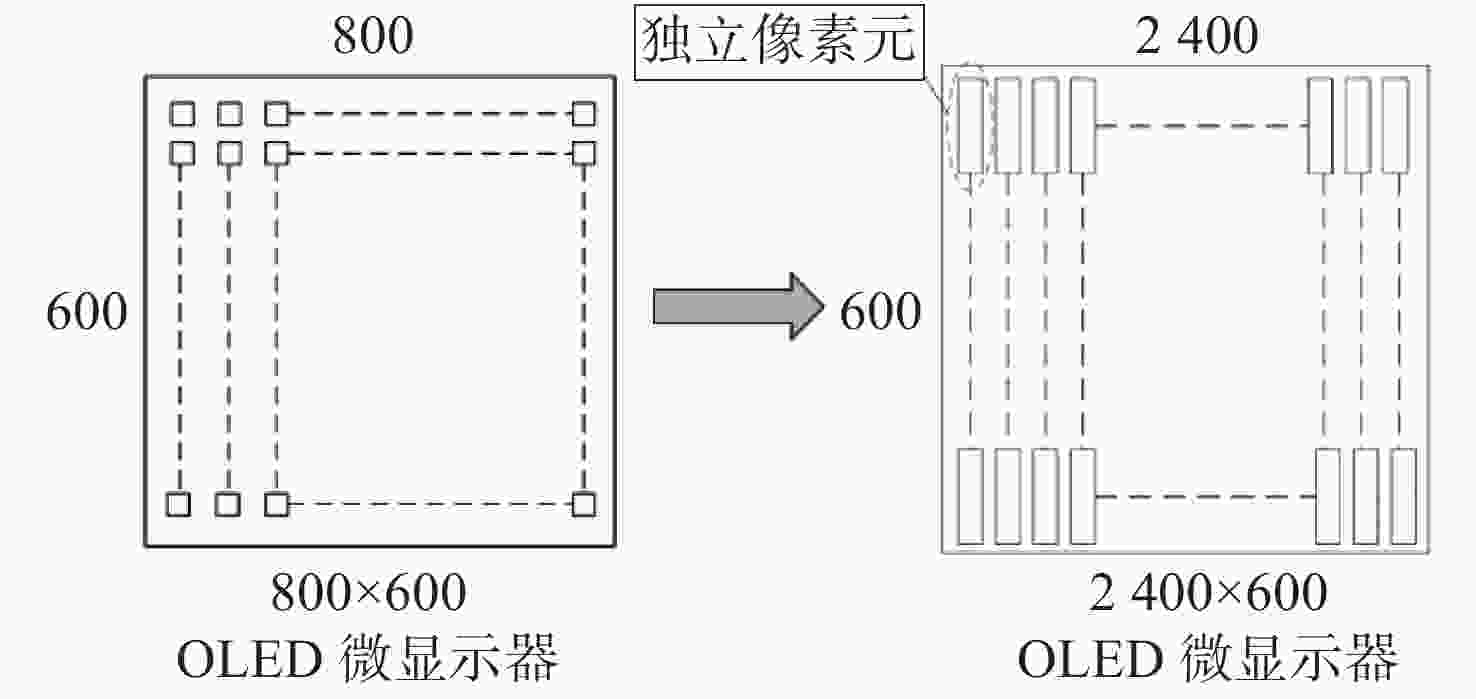
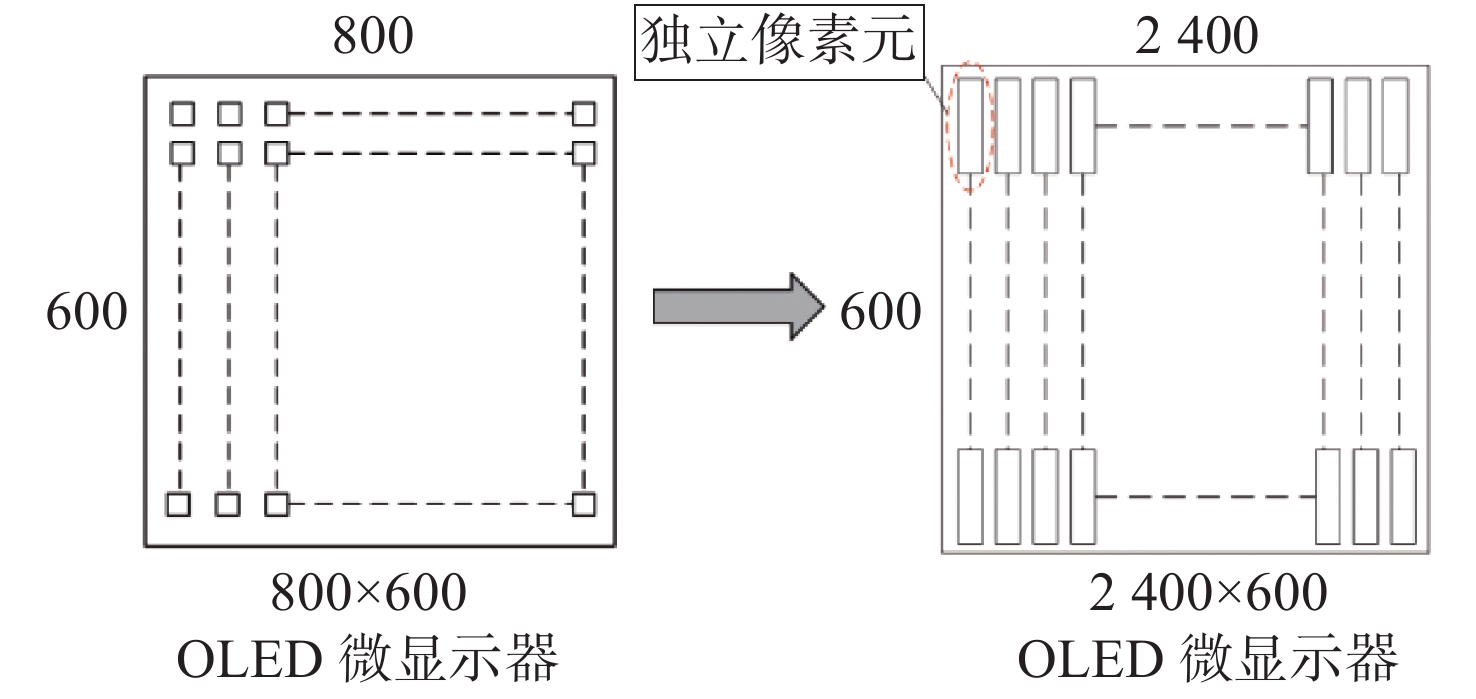
图 4 OLED微显示器分辨率扩展示意图
Figure 4. Schematic diagram of resolution expansion of OLED microdisplay
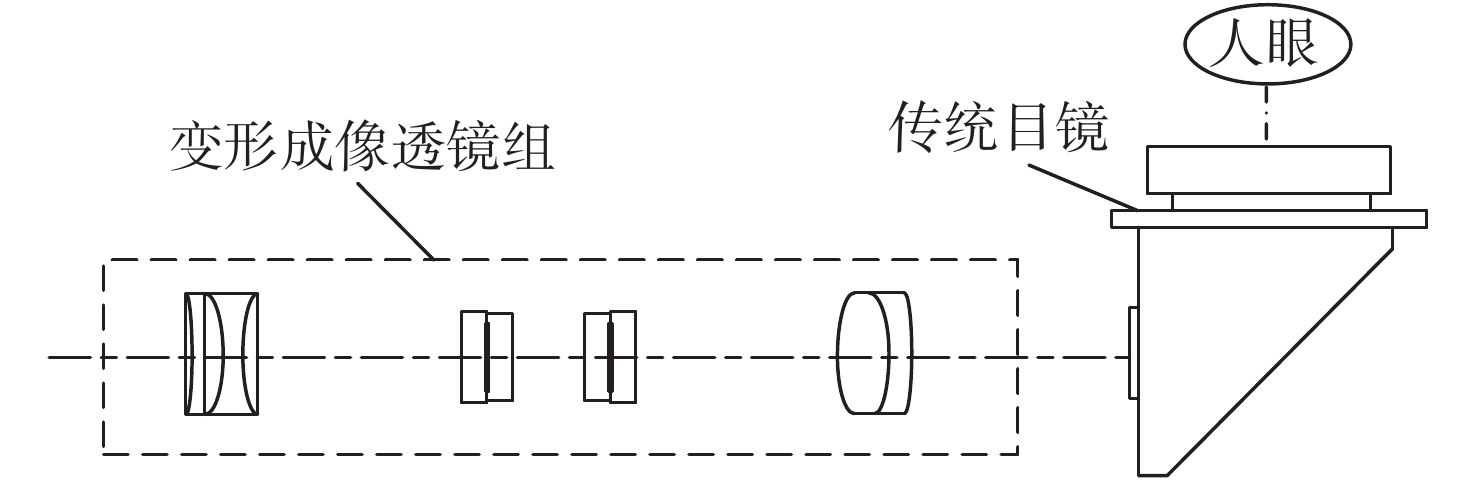
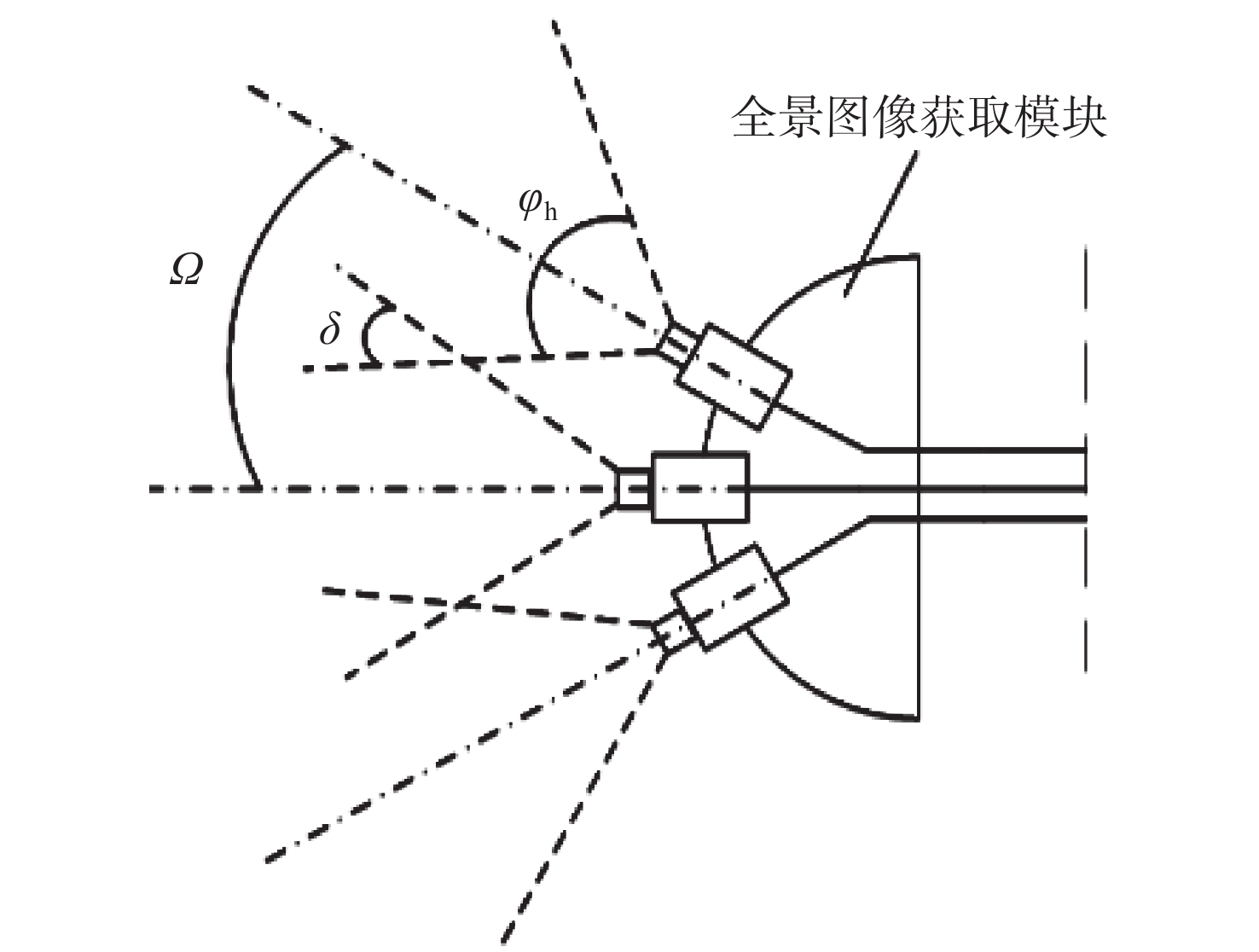
图 5 变形目镜光学系统整体结构示意图
Figure 5. Schematic diagram of the overall structure of anamorphic eyepiece optical system
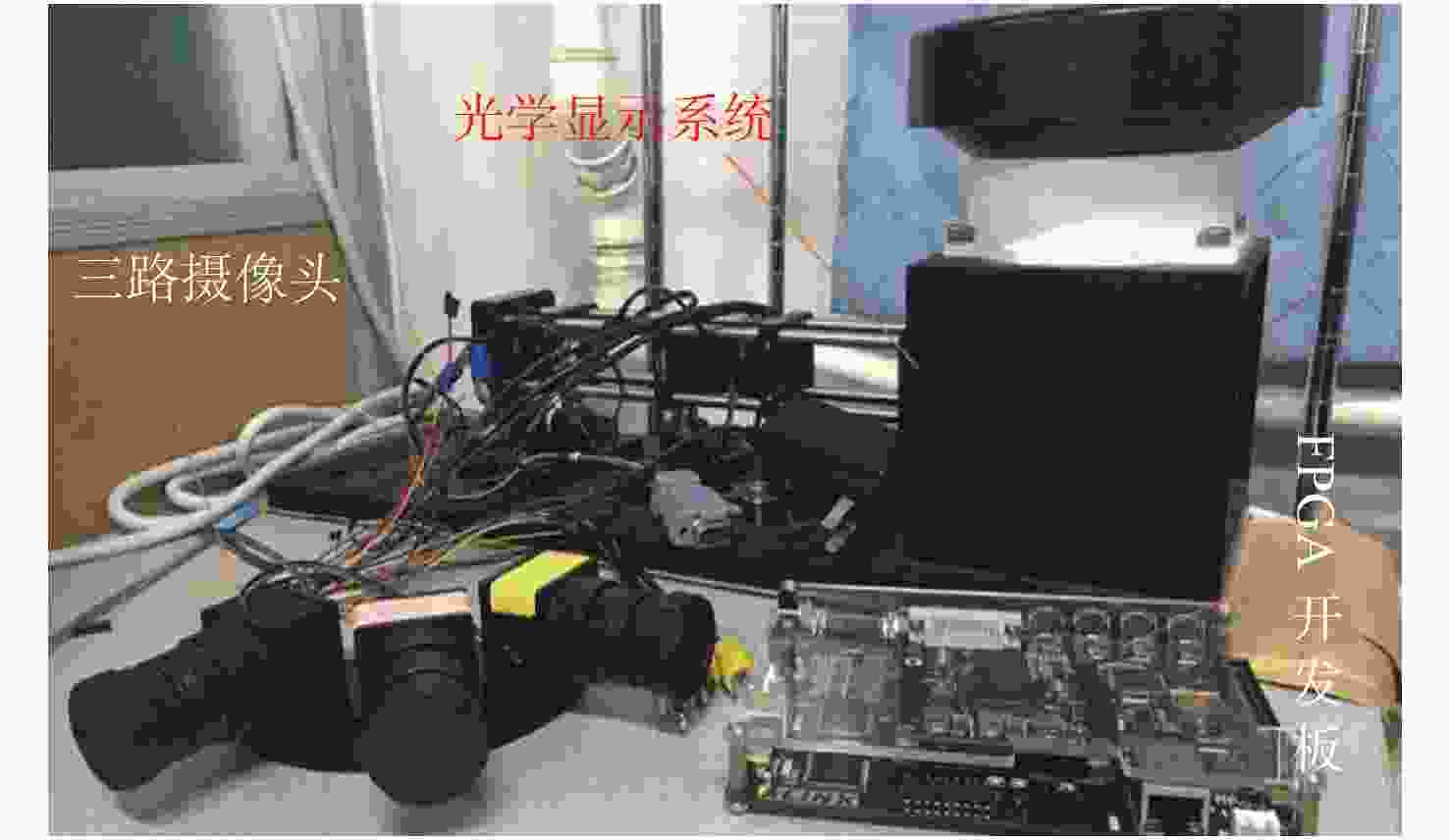
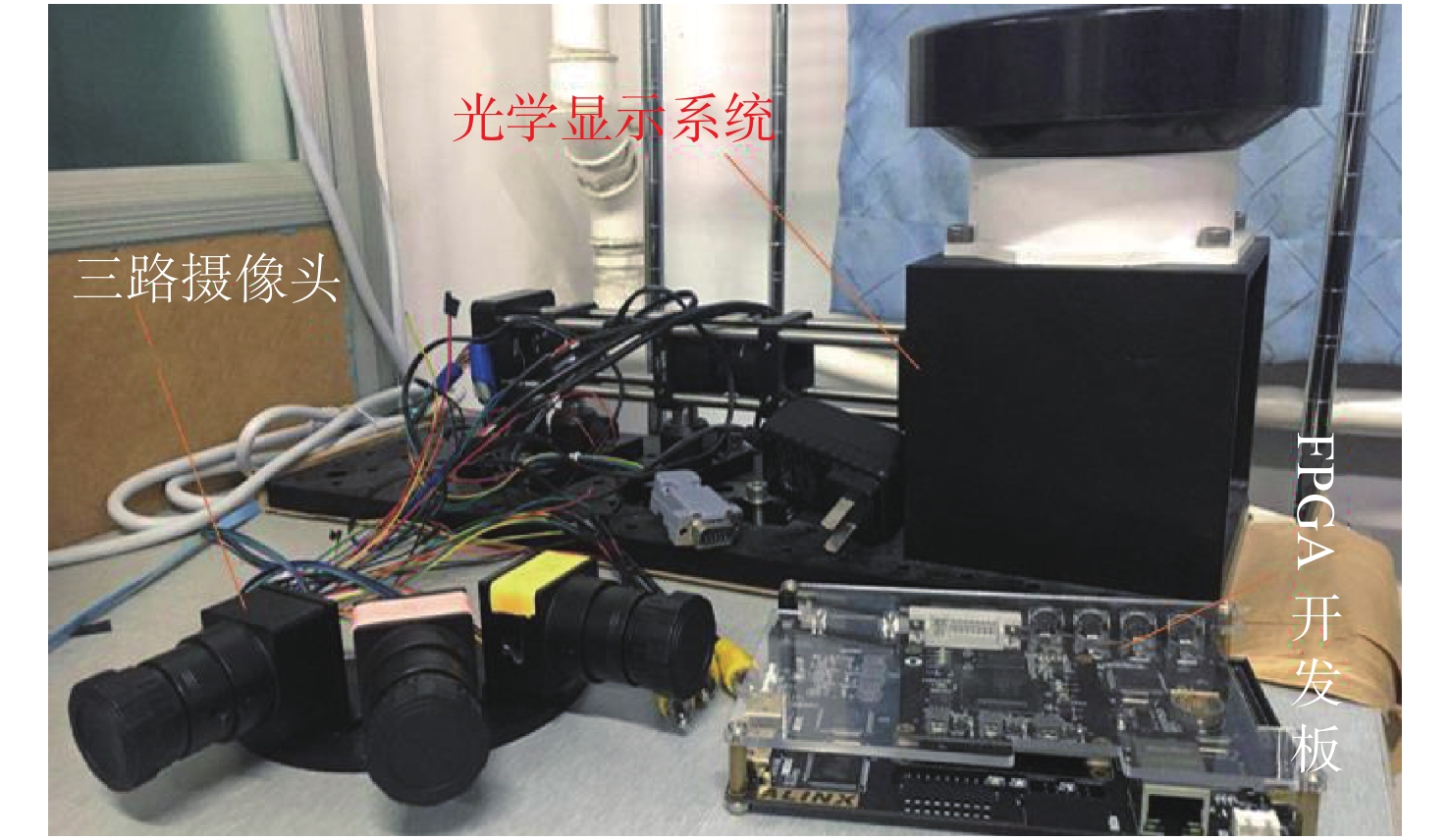
图 9 全景视频图像采集与显示实验系统
Figure 9. Experimental system of panoramic video image acquisition and display
-
[1] HUANG Q D, QIU Y H, TIAN X P. Image automatic mosaic method based on feature points and optimization theory[J]. Acta Photonica Sinica, 2009, 38(8): 2139-2143. [2] BENOSMAN R, KANG S B. Panoramic Vision[M]. New York: Springer, 2001. [3] HARA Z I, TERAZAKI N, SHIRAMATSU N, et al. Picture quality of different pixel arrangements for large-sized matrix displays[J]. Electronics and Communications in Japan (Part Ⅱ:Electronics) , 1994, 77(7): 105-120. doi: 10.1002/ecjb.4420770711 [4] 贺宇, 王岭雪, 蔡毅, 等. 折反射周视系统研究进展与展望[J]. 中国光学,2017,10(5):681-689. doi: 10.3788/co.20171005.0681HE Y, WANG L X, CAI Y, et al. Research progress and prospect of catadioptric panoramic system[J]. Chinese Optics, 2017, 10(5): 681-689. (in Chinese) doi: 10.3788/co.20171005.0681 [5] 白剑, 牛爽, 杨国光, 等. 全景光学环带凝视成像技术[J]. 红外与激光工程,2006,35(3):331-335. doi: 10.3969/j.issn.1007-2276.2006.03.019BAI J, NIU SH, YANG G G, et al. Panoramic optical annular staring imaging technology[J]. Infrared and Laser Engineering, 2006, 35(3): 331-335. (in Chinese) doi: 10.3969/j.issn.1007-2276.2006.03.019 [6] 徐海云, 王普, 王广生. 全景拼图的实现技术[J]. 北京工业大学学报,2004,30(4):417-422.XU H Y, WANG P, WANG G SH. Research on the realization techniques of panoramic image merging[J]. Journal of Beijing University of Technology, 2004, 30(4): 417-422. (in Chinese) [7] 冯俊, 严利民, 夏明治. 提高图像亮度的多基色子像素着色算法[J]. 光电子技术,2016,36(3):173-179.FENG J, YAN L M, XIA M ZH. A multi-primary sub-pixel rendering algorithm improving image brightness[J]. Optoelectronic Technology, 2016, 36(3): 173-179. (in Chinese) [8] 陈俊, 王青松. 基于OLED显示单元的红外上转换器件研究进展[J]. 中国光学,2015,8(1):17-27. doi: 10.3788/co.20150801.0017CHEN J, WANG Q S. Recent progress of infrared upconversion device based on the integration of OLED[J]. Chinese Optics, 2015, 8(1): 17-27. (in Chinese) doi: 10.3788/co.20150801.0017 [9] 陈敏泽, 林韵英. OLED显示驱动技术新进展[J]. 电视技术,2013,37(S2):419-421.CHEN M Z, LIN Y Y. New development of OLED display driving technology[J]. Video Engineering, 2013, 37(S2): 419-421. (in Chinese) [10] 赖良德, 李晨, 许虞俊. 硅基OLED微显示器像素发光电流稳定性的研究[J]. 电子器件,2019,42(4):898-903. doi: 10.3969/j.issn.1005-9490.2019.04.017LAI L D, LI CH, XU Y J. Pixel circuit of OLED-on-silicon micro displays with high current stability[J]. Chinese Journal of Electron Devices, 2019, 42(4): 898-903. (in Chinese) doi: 10.3969/j.issn.1005-9490.2019.04.017 [11] KEPLER R G, BEESON P M, JACOBS S J, et al. Electron and hole mobility in tris (8-hydroxyquinolinolato-N1, O8) aluminum[J]. Applied Physics Letters, 1995, 66(26): 3618-3620. doi: 10.1063/1.113806 [12] 郭俊达, 金伟其, 顿雄, 等. 基于OLED微显示器和变形目镜的全景显示技术[J]. 中国光学,2018,11(4):684-693. doi: 10.3788/co.20181104.0684GUO J D, JIN W Q, DUN X, et al. Panoramic display technology based on OLED micro-display and anamorphic eyepiece[J]. Chinese Optics, 2018, 11(4): 684-693. (in Chinese) doi: 10.3788/co.20181104.0684 [13] HOPKINS H H. Diffraction theory of laser read-out systems for optical video discs[J]. Journal of the Optical Society of America, 1979, 69(1): 4-24. doi: 10.1364/JOSA.69.000004 [14] 李继军, 聂晓梦, 甄威, 等. 显示技术比较及新进展[J]. 液晶与显示,2018,33(1):74-84. doi: 10.3788/YJYXS20183301.0074LI J J, NIE X M, ZHEN W, et al. New developments and comparisons in display technology[J]. Chinese Journal of Liquid Crystals and Displays, 2018, 33(1): 74-84. (in Chinese) doi: 10.3788/YJYXS20183301.0074 [15] 黄成强, 杨友昌, 贺娟, 等. 基于权重因子的RGB-RGBG像素结构转换算法及其FPGA实现[J]. 液晶与显示,2017,32(7):572-579. doi: 10.3788/YJYXS20173207.0572HUANG CH Q, YANG Y C, HE J, et al. RGB to RGBG conversion algorithm based on weighting factors and related FPGA realization[J]. Chinese Journal of Liquid Crystals and Displays, 2017, 32(7): 572-579. (in Chinese) doi: 10.3788/YJYXS20173207.0572 [16] 张春燕, 陈文栋, 季渊, 等. 基于OLED微显示器的原子扫描控制器设计[J]. 液晶与显示,2019,34(4):395-401. doi: 10.3788/YJYXS20193404.0395ZHANG CH Y, CHEN W D, JI Y, et al. Design of atomic scan controller based on OLED microdisplay[J]. Chinese Journal of Liquid Crystals and Displays, 2019, 34(4): 395-401. (in Chinese) doi: 10.3788/YJYXS20193404.0395 [17] 倪婷, 丁磊, 王江南, 等. 基于激基复合物主体的高性能OLED器件[J]. 液晶与显示,2019,34(9):841-848. doi: 10.3788/YJYXS20193409.0841NI T, DING L, WANG J N, et al. OLED with high performance based on exciplex[J]. Chinese Journal of Liquid Crystals and Displays, 2019, 34(9): 841-848. (in Chinese) doi: 10.3788/YJYXS20193409.0841 [18] JIPSON V B, WILLIAMS C C. Two-dimensional modeling of an optical disk readout[J]. Applied Optics, 1983, 22(14): 2202-2209. doi: 10.1364/AO.22.002202 [19] 王志坚, 郑建平. 光学系统及元件动态下物象共轭理论[J]. 长春光学精密机械学院学报,1992,15(2):1-13.WANG ZH J, ZHENG J P. The object–image conjugate theory of optical systems and optical elements in motion[J]. Journal of Changchun Institute of Optics and Fine Mechanics, 1992, 15(2): 1-13. (in Chinese) [20] 张建华, 刘超, 周哲海, 等. 基于柱透镜的单细胞照明系统的设计与实现[J]. 激光与红外,2016,46(6):722-726. doi: 10.3969/j.issn.1001-5078.2016.06.015ZHNAG J H, LIU CH, ZHOU ZH H, et al. Design and implementation of single-cell illumination system based on cylindrical lens[J]. Laser &Infrared, 2016, 46(6): 722-726. (in Chinese) doi: 10.3969/j.issn.1001-5078.2016.06.015 [21] 关珊珊, 周洁敏. 基于Xilinx FPGA的SPI Flash控制器设计与验证[J]. 电子器件,2012,35(2):216-220. doi: 10.3969/j.issn.1005-9490.2012.02.023GUAN SH SH, ZHOU J M. Design and verification of SPI flash controller based on Xilinx FPGA[J]. Chinese Journal of Electron Devices, 2012, 35(2): 216-220. (in Chinese) doi: 10.3969/j.issn.1005-9490.2012.02.023 [22] 马其琪, 鲍爱达. 基于DDR3 SDRAM的高速大容量数据缓存设计[J]. 计算机测量与控制,2015,23(9):3112-3113, 3118.MA Q Q, BAO A D. High speed and large capacity data buffer design based on DDR3 SDRAM[J]. Computer Measurement &Control, 2015, 23(9): 3112-3113, 3118. (in Chinese) [23] ZHOU R J, HAO Y Y, HU J S. Quick system-level DDR3 signal integrity simulation research[J]. Journal of Electronic Science and Technology, 2013, 11(3): 286-290. [24] LEE S S, HUANG L S, KIM C J, et al. Free-space fiber-optic switches based on MEMS vertical torsion mirrors[J]. Journal of Lightwave Technology, 1999, 17(1): 7-13. doi: 10.1109/50.737414 [25] 马志超. DDR3控制器的设计与验证[D].西安: 西安电子科技大学, 2013.MA ZH CH. Design and verification of DDR3 controller[D]. Xi’an: Xidian University, 2013. (in Chinese) [26] 赵曙光. 可编程逻辑器件原理、开发与应用[M]. 西安: 西安电子科技大学出版社, 2000.ZHAO SH G. Principle, Development and Application of Programmable Logic Device[M]. Xi’an: Xidian University Press, 2000. (in Chinese) [27] 王贺, 张大宇, 汪悦, 等. 基于片上Loopback的FPGA DDR模块串行测试方法[J]. 计算机与数字工程,2019,47(1):24-28. doi: 10.3969/j.issn.1672-9722.2019.01.007WANG H, ZHANG D Y, WANG Y, et al. Serial test method of FPGA DDR module based on on-chip loopback[J]. Computer and Digital Engineering, 2019, 47(1): 24-28. (in Chinese) doi: 10.3969/j.issn.1672-9722.2019.01.007 [28] BHASKER J. Verilog HDL综合实用教程[M]. 孙海平, 译. 北京: 清华大学出版社, 2004.BHASKER J. Verilog HDL Synthesis A Practical Primer[M]. SUN H P, trans. Beijing: Tsinghua University Press, 2004. (in Chinese) [29] XILINX Inc. Spartan-6 family overview[R]. US: Xilinx Inc, 2011. [30] WINBOND. W25Q128FV Datasheet[R]. Winbond, 2012. [31] 冯雁军, 周清海, 孙伟昶, 等. FPGA平台的实时全景视频系统设计[J]. 电子产品世界,2013,20(2):72-74.FENG Y J, ZHOU Q H, SUN W CH, et al. Design of real-time panoramic video system based on FPGA[J]. Electronic Engineering &Product World, 2013, 20(2): 72-74. (in Chinese) -

 下载:
下载:





图(11)
计量
- 文章访问数: 2275
- HTML全文浏览量: 901
- PDF下载量: 142
- 被引次数: 0
