


An automatic focusing method of a telescope objective lens based on the defocusing estimation of a circular edge response
-
摘要: 本文提出了一种基于圆边响应曲线的离焦估计新算法,实现了调焦参数的标定和望远物镜的自动调焦。建立了圆形边缘的灰度响应与离焦半径的关系模型,设计了圆四周离焦半径的双阈值均值滤波器,实现了模糊图像离焦半径的精确估计,降低了运动模糊和噪声的影响。根据离焦半径与调焦距离的线性关系,采用折线拟合方法,求解正焦调焦距离。然后,利用多个物距和正焦像距,优化求解测距调焦模型参数,实现了成像系统的自动调焦。仿真和实际实验验证了离焦半径估计算法的有效性和鲁棒性。标定后的自动调焦成像系统图像清晰,拍摄距离在43~52 m之间的物理分辨率接近理论值的一半,可分辨线宽优于0.354 mm.Abstract: A new defocusing estimation algorithm based on the response curve of a circular edge is proposed, through which the calibration of some focusing parameters and the automatic focusing of the telescope objective lens are achieved. The relationship between the gray-scale response of the edge of the circular pattern and the defocusing radius is established. Using the double threshold mean filtering of the defocusing radius around the circle, the accurate defocus radius of the blurred image is calculated and the influence of motion blur and noise is reduced. According to the linear relationship between defocus radius and focus distance, the broken line fitting method is used to obtain the focus distance. Then, by using multiple object and focus image distances, the parameters of the focusing model of the ranging method are optimized and the automatic focusing of the imaging system is achieved. Through simulation and experimentation, the feasibility and robustness of the defocusing estimation algorithm are verified. The images taken by the calibrated autofocus imaging system are clear, have a physical resolution that reaches half of their theoretical value, and have a resolvable line width better than 0.354 mm when the shooting distance is between 43 m and 52 m.
-
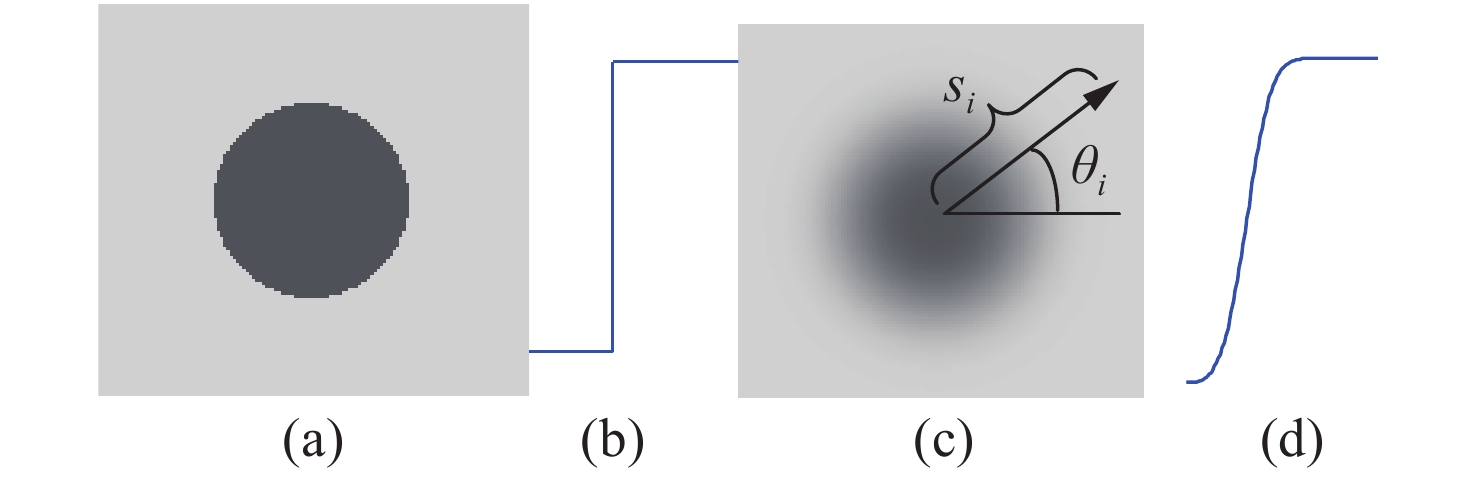
图 4 圆边的离焦响应。(a)圆点靶;(b)正焦曲线;(c)离焦图像;(d)离焦曲线
Figure 4. Defocusing response of circular edge. (a) Circle image; (b) focus curve; (c) defocus image; (d) defocus curve
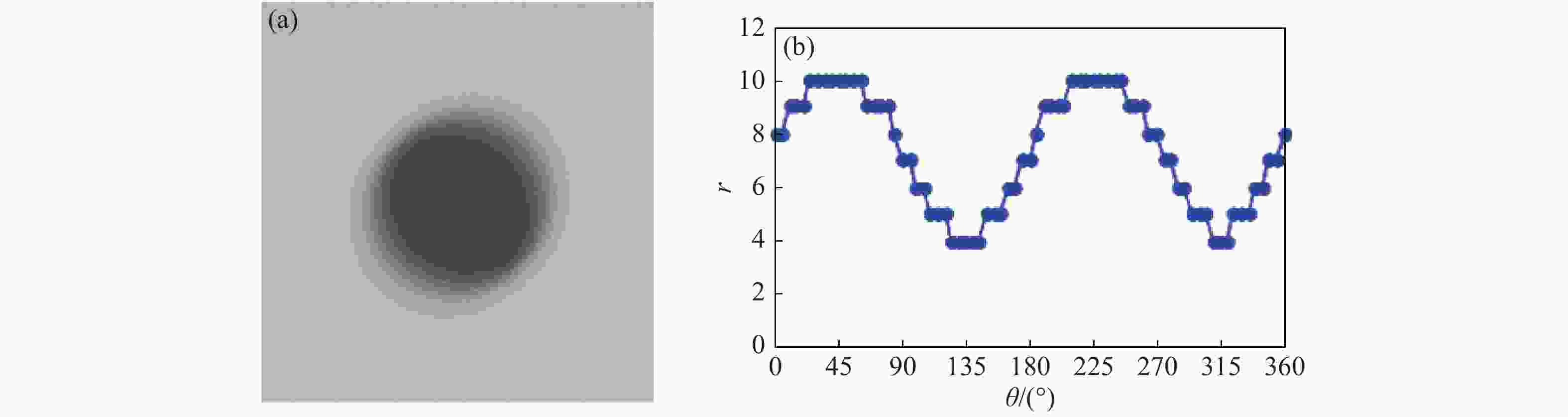
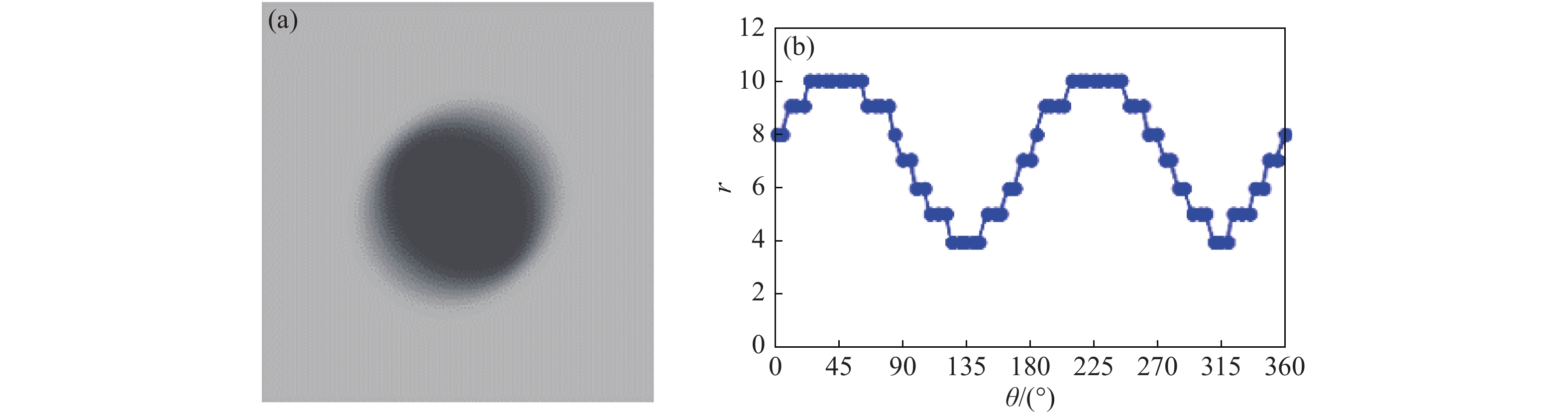
图 5 圆四周离焦估计。(a)模糊图像;(b)离焦半径分布
Figure 5. Distribution of defocus radius around the circle. (a) Blurred image; (b)distribution of defocus radius
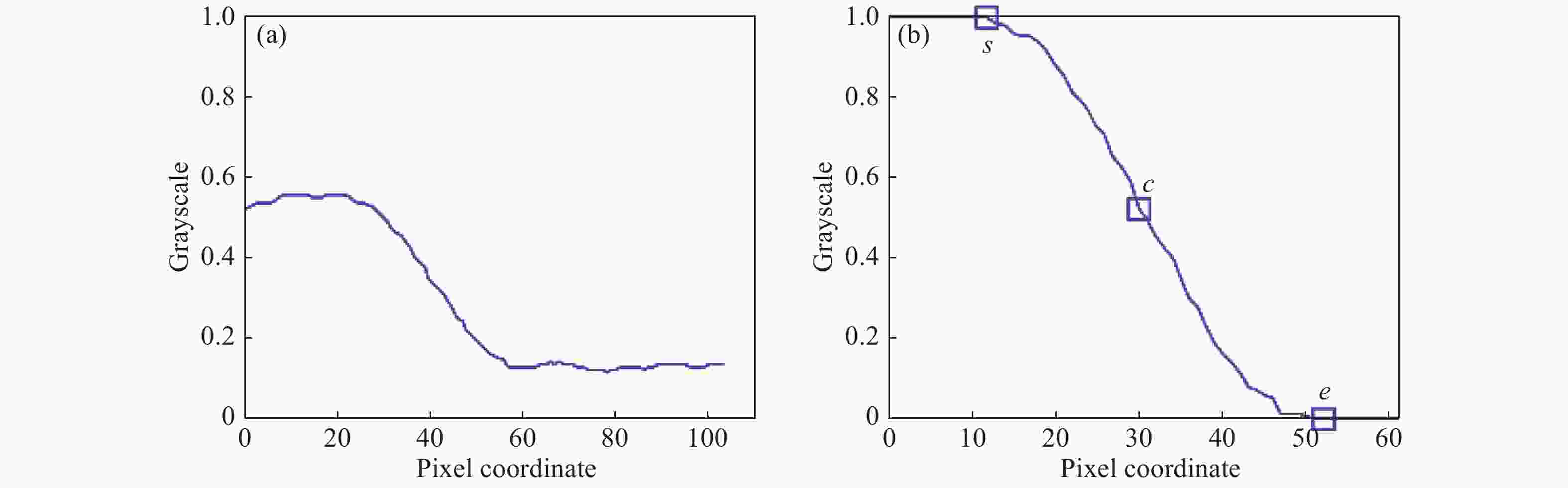
图 6 圆边响应曲线提取。(a)提取曲线;(b)标准化曲线
Figure 6. Extraction of circular response curve. (a) Extracted curve; (b) standardized curve
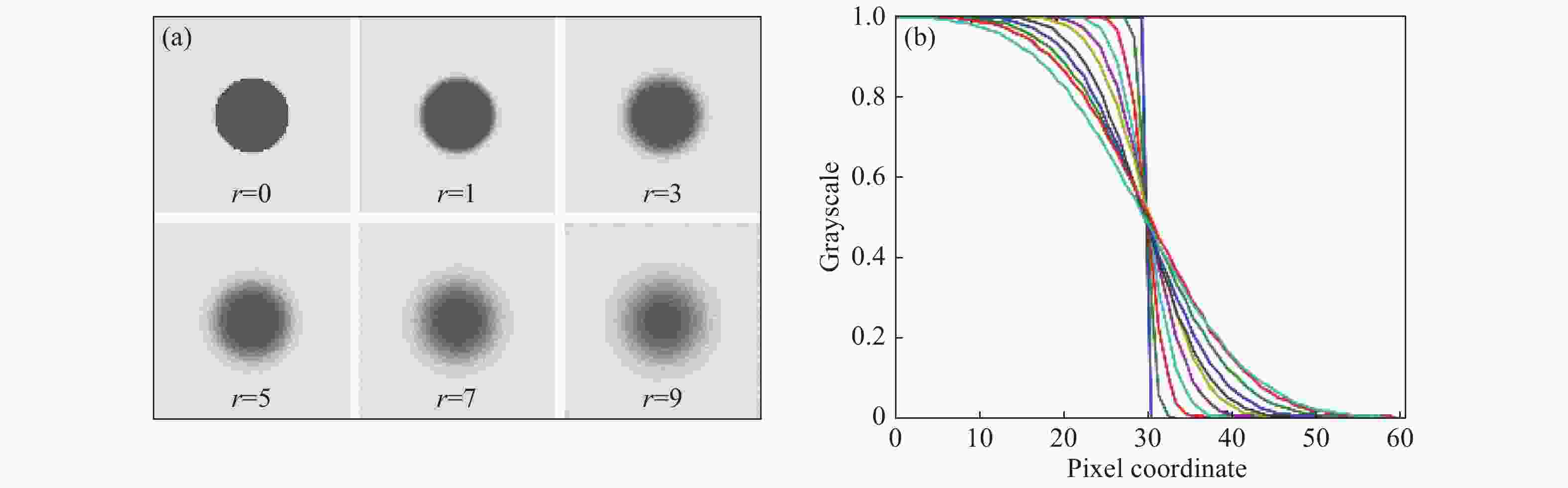
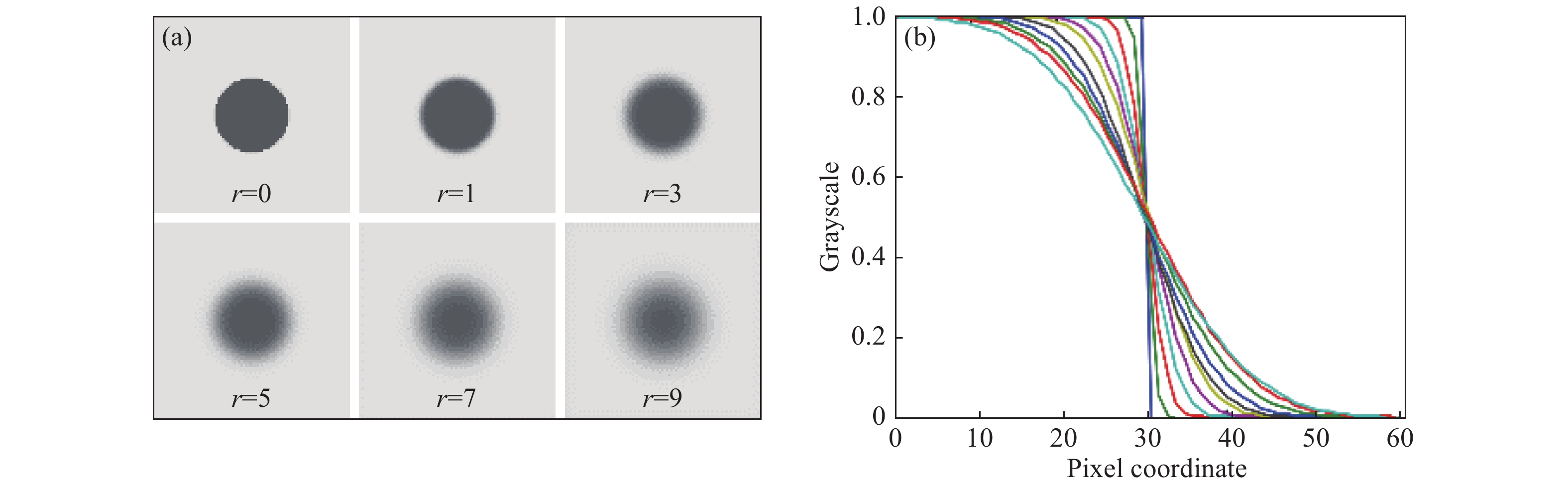
图 7 圆边响应曲线库。(a)不同离焦半径的圆形图像;(b)曲线库。
Figure 7. Circular edge defocusing response. (a) Circles with different defocusing radius; (b) curve library.
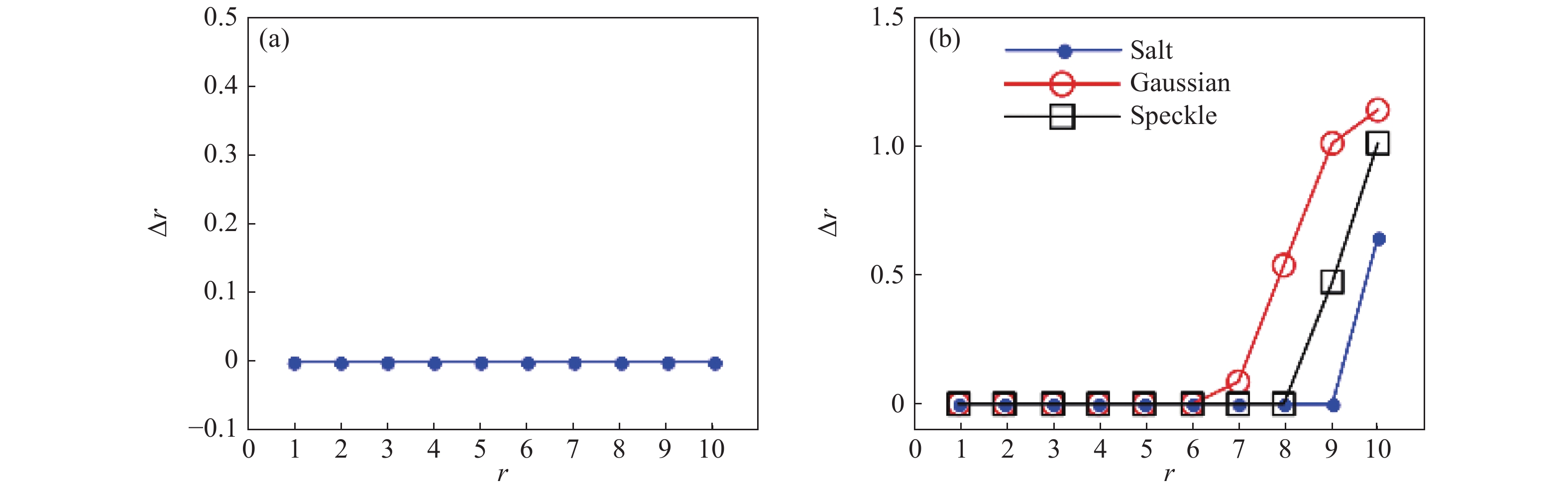
图 8 噪声对离焦估计的影响。(a)无噪声;(b)有噪声
Figure 8. Influence of noise on defocusing estimation. (a) Without noise; (b) with noise

图 11 离焦半径估计结果。(a)不同调焦距离的圆点离焦图像;(b)离焦半径分布图
Figure 11. Results of defocus radius estimation. (a) Defocused circle images under different focusing distances; (b) defocus radius distribution.
图 14 自动调焦成像。(a)正焦图像;(b)分辨率板图像。
Figure 14. Autofocus imaging. (a) Focused images; (b) resolution board images.
-
[1] VALENÇA J, PUENTE I, JÚLIO E, et al. Assessment of cracks on concrete bridges using image processing supported by laser scanning survey[J]. Construction and Building Materials, 2017, 146: 668-678. doi: 10.1016/j.conbuildmat.2017.04.096 [2] ZHANG Y P, LIU L Y, GONG W T, et al. Autofocus system and evaluation methodologies: a literature review[J]. Sensors and Materials, 2018, 30(5): 1165-1174. [3] 梁翠萍, 李清安, 乔彦峰, 等. 简析光学系统自动调焦的方法[J]. 电光与控制,2006,13(6):93-96. doi: 10.3969/j.issn.1671-637X.2006.06.025LIANG C P, LI Q A, QIAO Y F, et al. On auto-focusing technology of optical system[J]. Electronics Optics &Control, 2006, 13(6): 93-96. (in Chinese) doi: 10.3969/j.issn.1671-637X.2006.06.025 [4] 黄垒, 辛立平, 韩旭辉, 等. 广角天文望远镜的自动调焦[J]. 光学 精密工程,2015,23(1):174-183. doi: 10.3788/OPE.20152301.0174HUANG L, XIN L P, HAN X H, et al. Auto-focusing of wide-angle astronomical telescope[J]. Optics and Precision Engineering, 2015, 23(1): 174-183. (in Chinese) doi: 10.3788/OPE.20152301.0174 [5] 李长春, 程国民, 曹永刚. 自动调焦系统速度评估与仿真[J]. 液晶与显示,2019,34(5):515-520. doi: 10.3788/YJYXS20193405.0515LI CH CH, CHENG G M, CAO Y G. Evaluation and simulation of auto-focus system speed[J]. Chinese Journal of Liquid Crystals and Displays, 2019, 34(5): 515-520. (in Chinese) doi: 10.3788/YJYXS20193405.0515 [6] 郭敬滨, 冯华杰, 王龙, 等. 基于梯度能量函数的调焦窗口构建方法[J]. 红外技术,2016,38(3):197-202. doi: 10.11846/j.issn.1001_8891.201603004GUO J B, FENG H J, WANG L, et al. Design of focusing window based on energy function of gradient[J]. Infrared Technology, 2016, 38(3): 197-202. (in Chinese) doi: 10.11846/j.issn.1001_8891.201603004 [7] 朱铮涛, 黎绍发, 陈华平. 基于图像熵的自动聚焦函数研究[J]. 光学 精密工程,2004,12(5):537-542.ZHU ZH T, LI SH F, CHEN H P. Research on auto-focused function based on the image entropy[J]. Optics and Precision Engineering, 2004, 12(5): 537-542. (in Chinese) [8] 王冠军. 基于图像处理的光电测量设备自动调焦方法研究[D]. 长春: 中国科学院长春光学精密机械与物理研究所, 2016.WANG G J. Research on auto-focusing method of photoelectric measurement equipment based on image processing[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2016. (in Chinese) [9] 黄艳, 徐巧玉, 叶东, 等. 基于微分图像自相关的自动对焦法[J]. 光学学报,2010,30(12):3435-3440. doi: 10.3788/AOS20103012.3435HUANG Y, XU Q Y, YE D, et al. Auto-focus method based on autocorrelation of derivative image[J]. Acta Optica Sinica, 2010, 30(12): 3435-3440. (in Chinese) doi: 10.3788/AOS20103012.3435 [10] TANG T Y, CHEN Q, FENG SH J, et al. Active depth estimation from defocus using a camera array[J]. Applied Optics, 2018, 57(18): 4960-4967. doi: 10.1364/AO.57.004960 [11] WANG Y R, FENG H J, XU ZH H, et al. Fast auto-focus scheme based on optical defocus fitting model[J]. Journal of Modern Optics, 2018, 65(7): 858-868. doi: 10.1080/09500340.2017.1411540 [12] SUN H D, ZHAO ZH J, JIN X S, et al.. Depth from defocus and blur for single image[C]. Proceedings of 2013 Visual Communications and Image Processing, IEEE, 2013. [13] 李启辉, 丁亚林, 修吉宏, 等. 基于图像处理的自准直检焦方法[J]. 激光与光电子学进展,2020,57(2):021104.LI Q H, DING Y L, XIU J H, et al. Self-collimation inspection and focusing method based on image processing[J]. Laser &Optoelectronics Progress, 2020, 57(2): 021104. (in Chinese) [14] 王佳松, 孙海江, 江山, 等. 一种灰度梯度暗通道图像自动调焦方法[J]. 液晶与显示,2018,33(8):669-675. doi: 10.3788/YJYXS20183308.0669WANG J S, SUN H J, JIANG SH, et al. Auto-focusing method based on gray gradient and dark channel[J]. Chinese Journal of Liquid Crystals and Displays, 2018, 33(8): 669-675. (in Chinese) doi: 10.3788/YJYXS20183308.0669 [15] JEON J, YOON I, KIM D, et al. Fully digital auto-focusing system with automatic focusing region selection and point spread function estimation[J]. IEEE Transactions on Consumer Electronics, 2010, 56(3): 1204-1210. doi: 10.1109/TCE.2010.5606247 [16] 王昊, 张涛, 张振, 等. 单幅图像估计离焦量的航空摄像机自动调焦系统[J]. 液晶与显示,2018,33(8):669-675. doi: 10.3788/YJYXS20163105.0484WANG H, ZHANG T, ZHANG ZH, et al. System of aerial camera auto-focus based on defocus estimate by single image[J]. Chinese Journal of Liquid Crystals and Displays, 2018, 33(8): 669-675. (in Chinese) doi: 10.3788/YJYXS20163105.0484 [17] ZHANG X B, FAN F M, GHEISARI M, et al. A novel auto-focus method for image processing using laser triangulation[J]. IEEE Access, 2019, 7: 64837-64843. doi: 10.1109/ACCESS.2019.2914186 -

 下载:
下载:






计量
- 文章访问数: 2319
- HTML全文浏览量: 787
- PDF下载量: 88
- 被引次数: 0
