


Design and verification of high-precision multi-star simulator with a wide field of view
-
摘要: 在星敏感器高精度的地面精确标定任务中,为满足其对高精度大视场多星模拟器的需求, 研制了可实现20°×40°视场内65颗恒星位置、星等精确模拟的高精度星模拟器。文章从星模拟器原理出发,基于星模拟器空间坐标系转换设计了模拟星支架,通过分析影响模拟星指向的误差,采用 “主次镜一体式安装”、“全铝式模拟星系统”、“星孔位置补偿”等关键技术,设计高精度模拟星系统;建立各模拟星在o-x′y′z′坐标系中的空间位置模型,推导出各模拟星俯仰偏摆角度、单星指向及星间角距数学模型,并计算出单星指向理论误差及星角距理论误差,作为装调及试验的理论基础。试验结果显示,所有模拟星单星指向误差均优于1.914″,任意两模拟星角距误差优于4.3″;设计的高精度大视场多星模拟器精度满足要求,解决了新型星敏感器对高精度大视场多星模拟器的需求,可以作为高精度星敏感器地面性能标定的重要设备。Abstract: In order to achieve high-precision ground calibration of star sensors and meet the needs of a high-precision multi-star simulator with a wide field of view, a high-precision star simulator which can accurately simulate the position and magnitude of 65 stars in the 20° × 40° field of view was developed. Based on the principles of star simulators and the transformation of the space coordinate systems of star simulators, a simulation star bracket was designed. By the analysis and calculation of errors that affect the pointing error of star simulations, the high-precision simulation star system was designed using key technologies such as "integrated installation of primary and secondary mirrors", "all-aluminum simulation star systems" and "star point position compensation". A space-position model of each simulation star in the o-x'y'z' coordinate system was established, and the mathematical models of pitch, yaw, single star direction and star angular distance were derived. Also, the theoretical errors in single-star direction and star angular distance, which were used as the theoretical basis for adjustment and testing, were calculated. The single-star direction error of all simulated stars was better than 1.914", and the angular distance error of any two simulated stars was better than 4.3". The accuracy of the designed high-precision wide-field-of-view multi-star simulator meets the requirements. It can be used as an important piece of equipment for ground calibration of high-precision star sensors.
-
Key words:
- star simulator /
- high precision /
- wide field of view /
- all aluminum /
- single star pointing /
- star angular distance
-

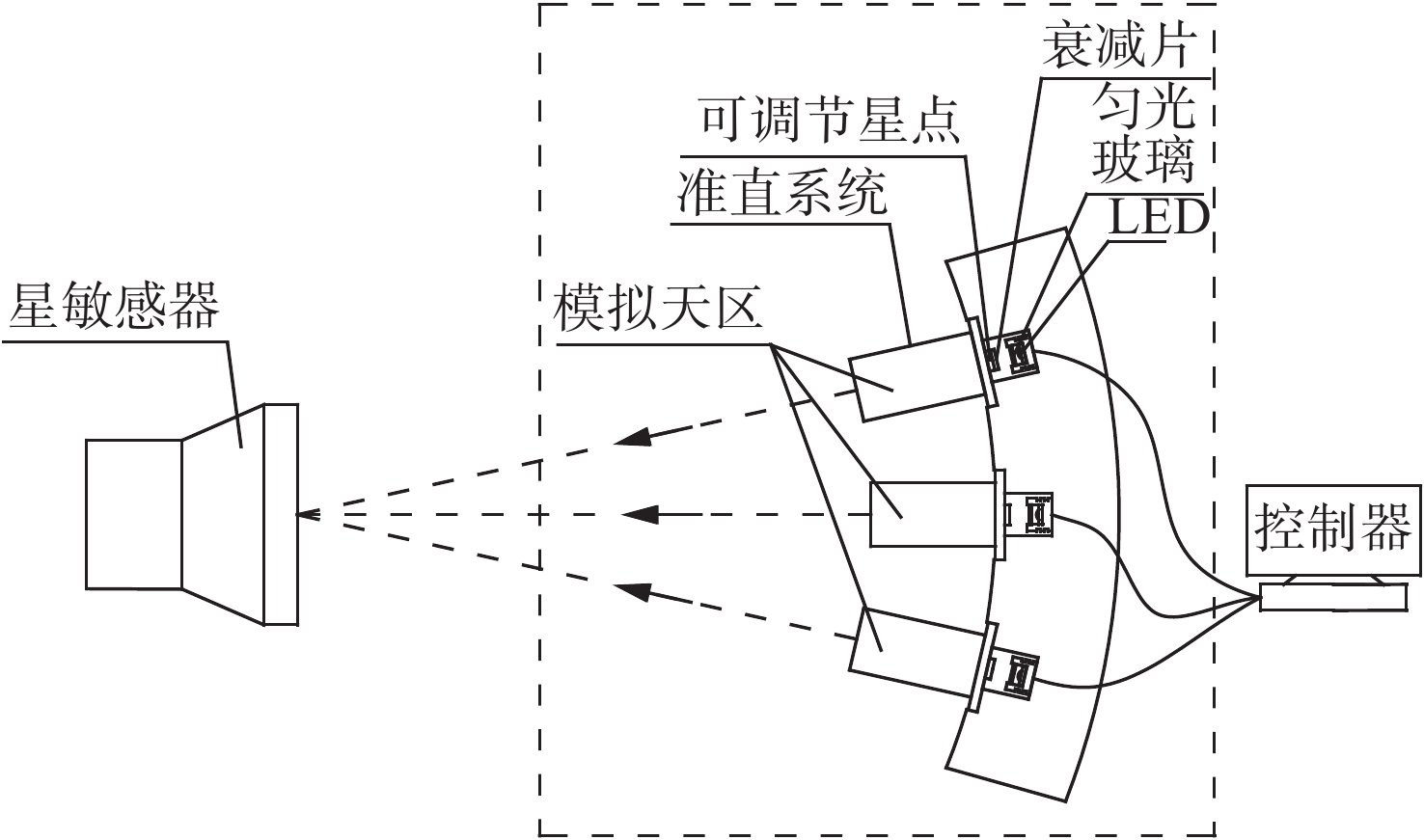
图 2 高精度大视场多星模拟器原理图
Figure 2. Schematic diagram of high-precision multi-star simulator with wide field of view

图 7 模拟星系统实物图及整机干涉检验图
Figure 7. Physical map of simulation star system and its interference diagram

图 9 高精度大视场多星模拟器实物图
Figure 9. Physical diagram of high-precision multi-star simulator with wide field of view
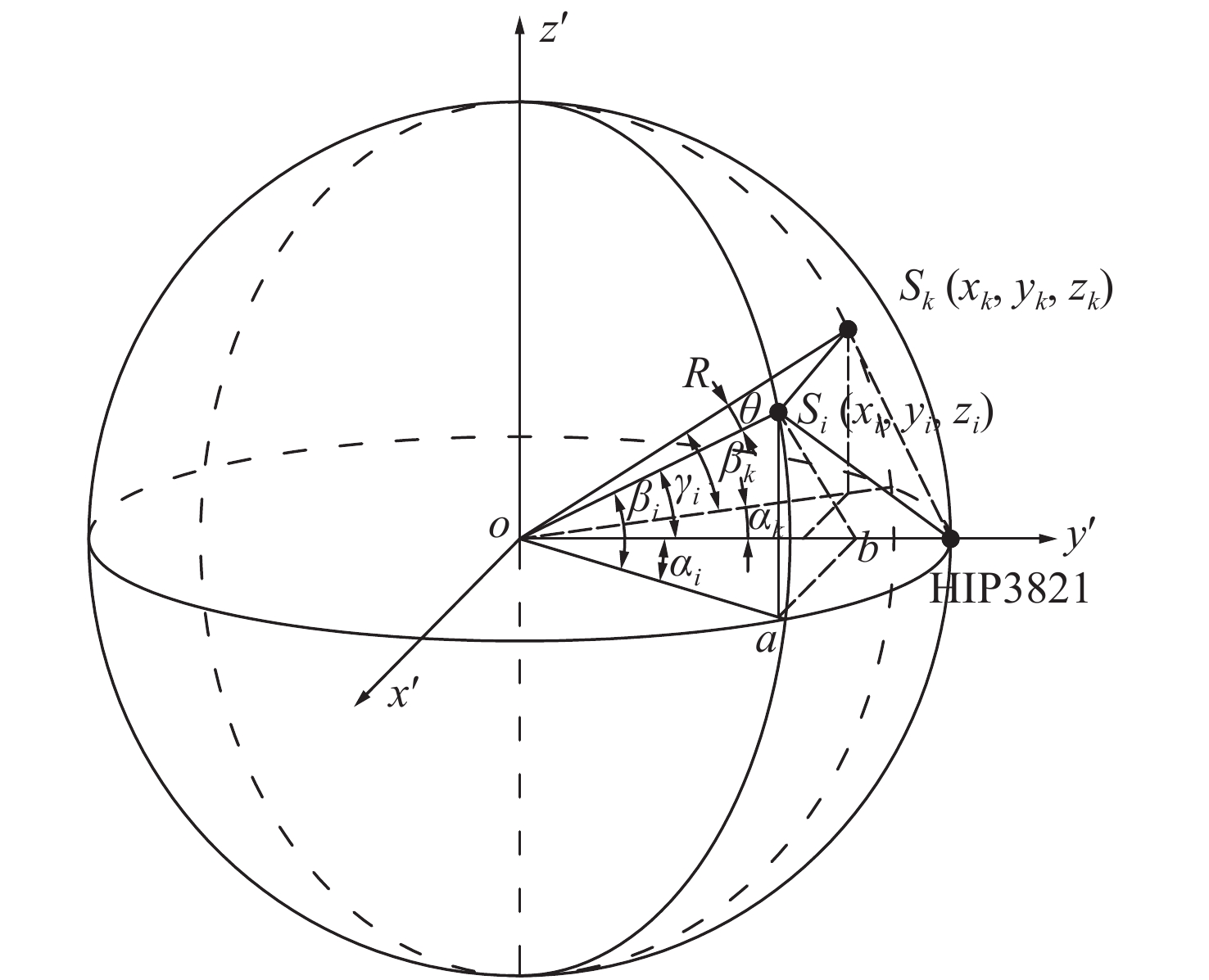
表 1 各模拟星在o-x′y′z′坐标系中的坐标值
Table 1. Coordinate values of simulation stars in o-x'y'z' coordinate system(mm)
序号 HIP号 xi′坐标 yi′ 坐标 zi′ 坐标 1 746 222.156 2488.992 74.603 2 2599 79.783 2488.551 225.271 …… …… …… …… …… 5 3821 0 2500 0 …… …… …… …… …… 64 116418 482.876 2446.708 −174.499 65 116962 339.63 2467.865 210.458  下载: 导出CSV
下载: 导出CSV
表 2 各个模拟星相对中心模拟星的理论偏摆和俯仰角度
Table 2. The theoretical yaw and pitch angle of each simulation star relative to its center(Unit:(°))
序号 HIP号 偏摆角α 俯仰角 1 746 5.10044 88.28996 2 2599 1.83626 84.83016 …… …… …… …… 5 3821 0 90 …… …… …… …… 64 116418 11.16428 94.00247 65 116962 7.83589 85.17093
下载: 导出CSV
表 3 各个模拟星实际检测偏摆和俯仰角度
Table 3. Practical detection of yaw and pitch angle of each simulation star
序号 HIP号 理论偏摆俯仰角(°) 测量偏摆俯仰角(°) 单星指向误差(″) 偏摆角α 俯仰角β 偏摆角α′ 俯仰角β′ 1 746 5.10044 88.28996 5.10022 88.28973 −0.826820841 2 2599 1.83626 84.83016 1.83606 84.83038 0.789502782 …… …… …… …… …… …… …… 5 3821 0.00000 90.00000 0.00000 90.00000 0 6 4427 359.06675 87.08662 359.06662 87.08652 −0.359564154 …… …… …… …… …… …… …… 12 13268 343.5068 88.18147 343.50726 88.18198 1.745461436 13 14328 340.61185 89.39579 340.61242 89.39635 1.894486725 …… …… …… …… …… …… …… 51 111674 19.76467 91.41438 19.7641 91.41381 −1.913923243 …… …… …… …… …… …… …… 64 116418 11.16428 94.00247 11.16395 94.00284 1.322767965 65 116962 7.83589 85.17093 7.83568 85.17125 1.132461231
下载: 导出CSV
-
[1] XU B T, LV J H, ZHOU X L, et al. Design and analysis of a star simulator suitable for confined space[J]. IOP Conference Series:Materials Science and Engineering, 2019, 504: 012088. doi: 10.1088/1757-899X/504/1/012088 [2] 张磊, 何昕, 魏仲慧, 等. 基于千兆网接口的星敏感器图像显示与存储[J]. 液晶与显示,2015,30(1):114-119. doi: 10.3788/YJYXS20153001.0114ZHANG L, HE X, WEI ZH H, et al. Image display and storage of star sensor based on Gigabit Ethernet[J]. Chinese Journal of Liquid Crystals and Displays, 2015, 30(1): 114-119. (in Chinese) doi: 10.3788/YJYXS20153001.0114 [3] 梁斌, 朱海龙, 张涛, 等. 星敏感器技术研究现状及发展趋势[J]. 中国光学,2016,9(1):16-29. doi: 10.3788/co.20160901.0016LIANG B, ZHU H L, ZHANG T, et al. Research status and development tendency of star tracker technique[J]. Chinese Optics, 2016, 9(1): 16-29. (in Chinese) doi: 10.3788/co.20160901.0016 [4] 郝云彩. 空间光学敏感器技术进展与应用[J]. 空间控制技术与应用,2017,43(4):9-18.HAO Y C. Technical progress and application of space optical sensor[J]. Aerospace Control and Application, 2017, 43(4): 9-18. (in Chinese) [5] DONG SH, GONG R, YE ZH L, et al. The analysis of the impact of star sensor calibration precision about single star simulator pin hole size specification[J]. Proceedings of SPIE, 2018, 10697: 106973J. [6] 徐达, 张国玉, 孙高飞. 空间背景光星模拟器系统设计[J]. 空间科学学报,2018,38(4):575-582. doi: 10.11728/cjss2018.04.575XU D, ZHANG G Y, SUN G F. Design of star simulator of large- field-view[J]. Chinese Journal of Space Science, 2018, 38(4): 575-582. (in Chinese) doi: 10.11728/cjss2018.04.575 [7] 刘欢. 大视场单星模拟器关键技术研究[D]. 长春: 长春理工大学, 2018.LIU H. Key technology of single star simulator of large-field-view[D]. Changchun: Changchun University of Science and Technology, 2018. (in Chinese). [8] 孟遥, 张国玉, 孙高飞, 等. 基于硅基液晶拼接的高对比度动态星模拟器光学系统[J]. 光学 精密工程,2016,24(3):511-520. doi: 10.3788/OPE.20162403.0511MENG Y, ZHANG G Y, SUN G F, et al. Optical system of high contrast dynamic star simulator based on LCOS splicing technology[J]. Optics and Precision Engineering, 2016, 24(3): 511-520. (in Chinese) doi: 10.3788/OPE.20162403.0511 [9] 赵梓朝, 陈启梦, 唐子博, 等. 高精度动态星模拟器的光学系统设计[J]. 计量学报,2018,39(5):641-644. doi: 10.3969/j.issn.1000-1158.2018.05.08ZHAO Z CH, CHEN Q M, TANG Z B, et al. Optical system design of high precision dynamic star simulator[J]. Acta Metrologica Sinica, 2018, 39(5): 641-644. (in Chinese) doi: 10.3969/j.issn.1000-1158.2018.05.08 [10] 林子棋. 星模拟器检测技术研究[D]. 长春: 长春理工大学, 2011.LIN Z Q. Research on measurement technique of star simulator[D]. Changchun: Changchun University of Science and Technology, 2011. (in Chinese). [11] 李晓妮. 光谱可调星模拟器技术研究[D]. 西安: 中国科学院研究生院(西安光学精密机械研究所), 2015.LI X N. The research for the star simulation with adjustable spectrum[D]. Xi’an: Xi’an Institute of Optics & Precision Mechanics, Chinese Academy of Science, 2015. (in Chinese). [12] 柳红岩, 孙慧婷, 李岩, 等. 漂移扫描CCD星图的smear现象快速消除方法研究[J]. 液晶与显示,2016,31(3):310-316. doi: 10.3788/YJYXS20163103.0310LIU H Y, SUN H T, LI Y, et al. Fast smear effect removal algorithm of CCD drift-scan star image[J]. Chinese Journal of Liquid Crystals and Displays, 2016, 31(3): 310-316. (in Chinese) doi: 10.3788/YJYXS20163103.0310 [13] 陈启梦, 张国玉, 王哲, 等. 标定型星模拟器设计与关键参数测试[J]. 长春理工大学学报(自然科学版),2017,40(4):41-44.CHEN Q M, ZHANG G Y, WANG ZH, et al. Design of calibration star simulator and test of key parameters[J]. Journal of Changchun University of Science and Technology (Natural Science Edition) , 2017, 40(4): 41-44. (in Chinese) [14] 高兴华, 李建永, 王霞. 高精度数字星等模拟器的设计[J]. 激光与光电子学进展,2017,54(2):022202.GAO X H, LI J Y, WANG X. Design of high-precision digital star magnitude simulator[J]. Laser &Optoelectronics Progress, 2017, 54(2): 022202. (in Chinese) [15] 刘洪兴, 任建伟, 刘则洵, 等. 基于LED的多色温多星等单星模拟器[J]. 光学学报,2015,35(2):0212003. doi: 10.3788/AOS201535.0212003LIU H X, REN J W, LIU Z X, et al. LED-based single star simulator with multi-color-temperature and multi-star-magnitude output[J]. Acta Optica Sinica, 2015, 35(2): 0212003. (in Chinese) doi: 10.3788/AOS201535.0212003 [16] 孙向阳, 付跃刚, 李杰, 等. 基于μLED发光技术的新型星模拟器设计[J]. 红外与激光工程,2016,45(4):0424002. doi: 10.3788/irla201645.0424002SUN X Y, FU Y G, LI J, et al. New star simulator design based on μLED luminous technology[J]. Infrared and Laser Engineering, 2016, 45(4): 0424002. (in Chinese) doi: 10.3788/irla201645.0424002 [17] 张晓娟, 张健, 杨俊杰, 等. 星模拟器多星等模拟方法研究[J]. 激光与红外,2018,48(9):1150-1155. doi: 10.3969/j.issn.1001-5078.2018.09.016ZHANG X J, ZHANG J, YANG J J, et al. Research on multiple star magnitude simulation of star simulator[J]. Laser &Infrared, 2018, 48(9): 1150-1155. (in Chinese) doi: 10.3969/j.issn.1001-5078.2018.09.016 [18] 陈启梦, 张国玉, 王凌云, 等. 高精度星敏感器测试设备的设计[J]. 红外与激光工程,2014,43(7):2234-2239. doi: 10.3969/j.issn.1007-2276.2014.07.036CHEN Q M, ZHANG G Y, WANG L Y, et al. Test equipment design of high precision star sensor[J]. Infrared and Laser Engineering, 2014, 43(7): 2234-2239. (in Chinese) doi: 10.3969/j.issn.1007-2276.2014.07.036 [19] 周言敏, 李建芳, 王君. 光学测量技术[M]. 西安;西安电子科技大学出版社, 2013.ZHOU Y M, LI J F, WANG J. Optical Measurement Techniques[M]. Xian: Xidian University Press, 2013. (in Chinese) [20] 于国栋, 王春阳. 稳健估计下的光学经纬仪多站交会算法[J]. 液晶与显示,2018,33(4):299-305. doi: 10.3788/YJYXS20183304.0299YU G D, WANG CH Y. Multi-station intersection algorithm of optical theodolites based on robust estimation[J]. Chinese Journal of Liquid Crystals and Displays, 2018, 33(4): 299-305. (in Chinese) doi: 10.3788/YJYXS20183304.0299 -

 下载:
下载:




计量
- 文章访问数: 3077
- HTML全文浏览量: 798
- PDF下载量: 141
- 被引次数: 0
