


-
摘要: 针对双目立体视觉重建点云模型与高分辨率纹理图像的融合问题,本文提出了一种新的纹理映射方法。在双目立体视觉系统上增设长焦纹理相机拍摄高分辨率纹理图像,利用高分辨率纹理图像与双目图像的二维特征匹配,以双目图像为桥梁,得到纹理图像与三维点云模型的匹配关系,进而实现高分辨率纹理图像到三维点云模型的映射。同时,针对映射过程中多视纹理图像重叠部分的数据冗余,提出一种引导线点云数据分区方法,有效解决了多视纹理图像重叠部分的映射问题。通过实验验证,所提方法能够方便准确地实现多视纹理图像与双目三维点云模型的纹理映射。在本文实验条件下,三维模型的纹理可分辨原始线宽为0.157 mm的线对,与双目系统直接产生的三维模型相比,其纹理分辨率提高了1倍,验证了所提出的多视高分辨率纹理映射方法的有效性。Abstract: Aiming at the fusion problem of binocular stereo vision reconstruction point cloud models and high-resolution texture images, a new texture mapping method is proposed. Adding a telephoto texture camera to the binocular stereo vision system to capture high-resolution texture images, the relationship between a texture image and a 3D point cloud model is obtained by matching the two-dimensional features of the high-resolution texture image and the binocular image. The binocular image is used as a bridge, thereby achieving the high-resolution mapping of high-rate texture images on 3D point cloud models. In view of the data redundancy of the overlapping parts of the multi-view texture images during mapping, a method of partitioning the guidance point cloud data is proposed, which effectively solves the problem. Through experimental verification, the proposed method can conveniently and accurately map multi-view texture images to binocular 3D point cloud models. Under experimental conditions, the texture of the 3D model can distinguish line pairs with an original line width of 0.157 mm, which is double the texture resolution of the 3D model directly generated by the binocular system, This verifies the effectiveness of the proposed multi-view high-resolution texture mapping method.
-
Key words:
- texture mapping /
- feature matching /
- stereo vision /
- high-resolution texture /
- multi-view texture image
-
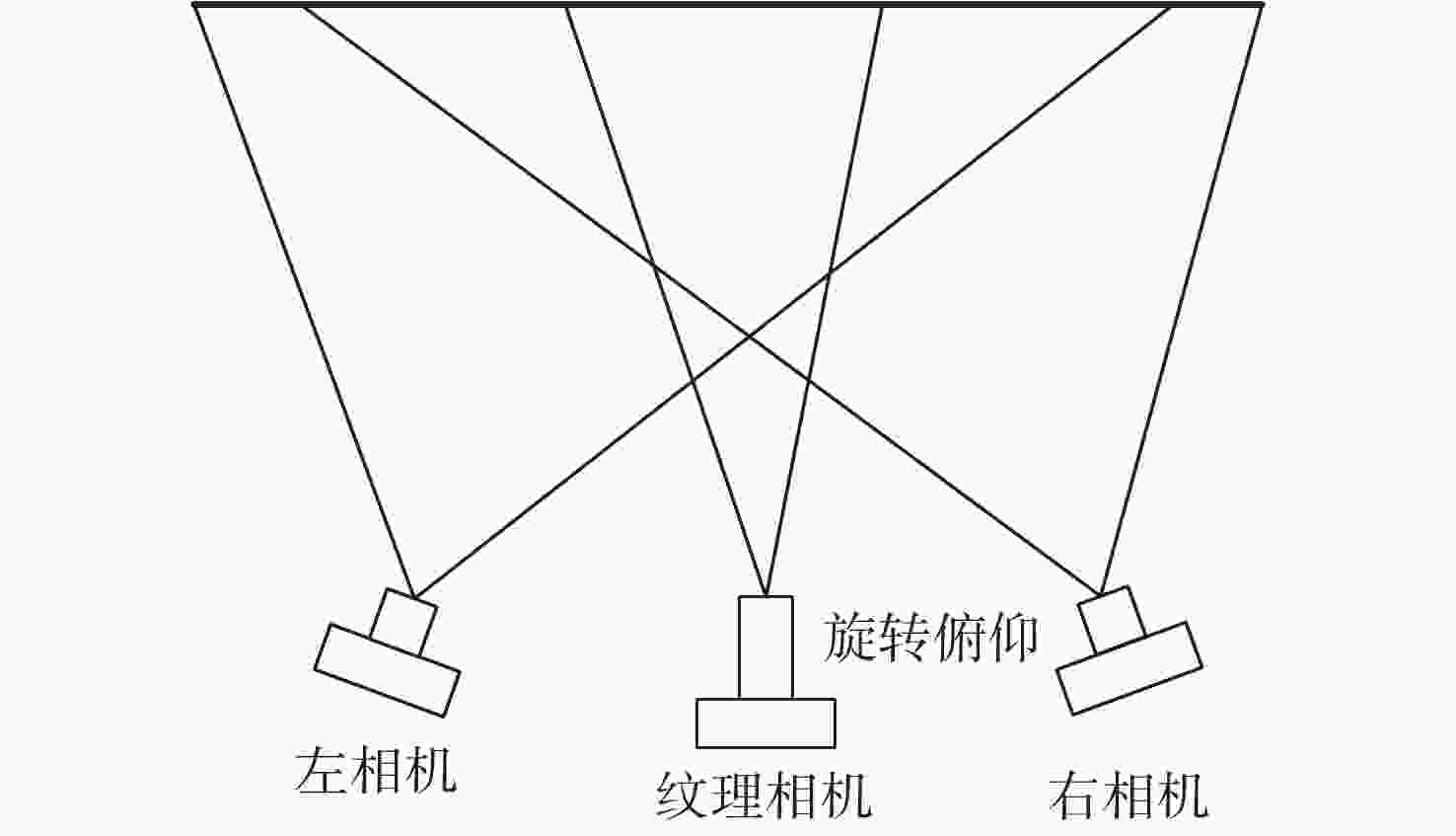
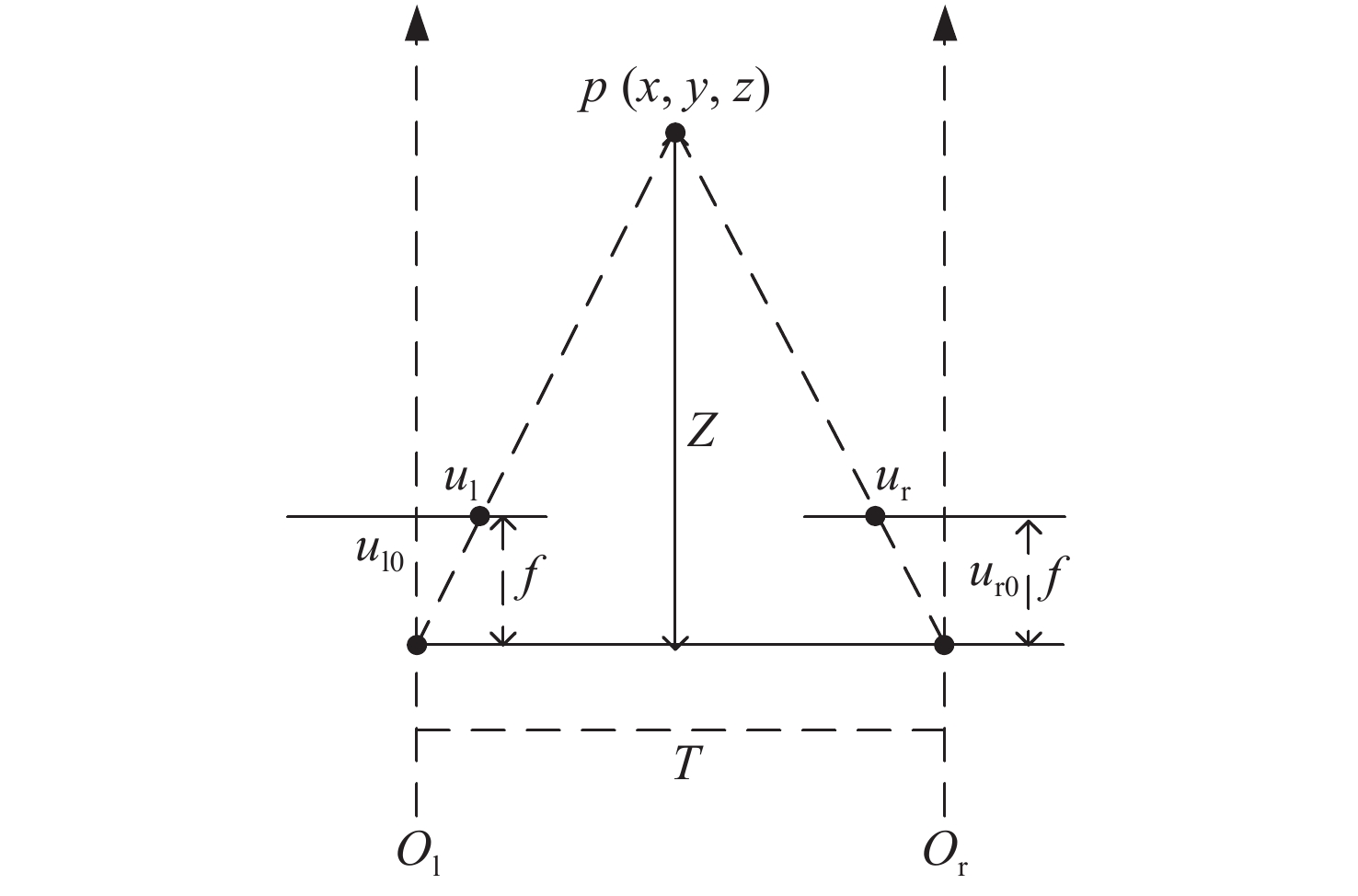
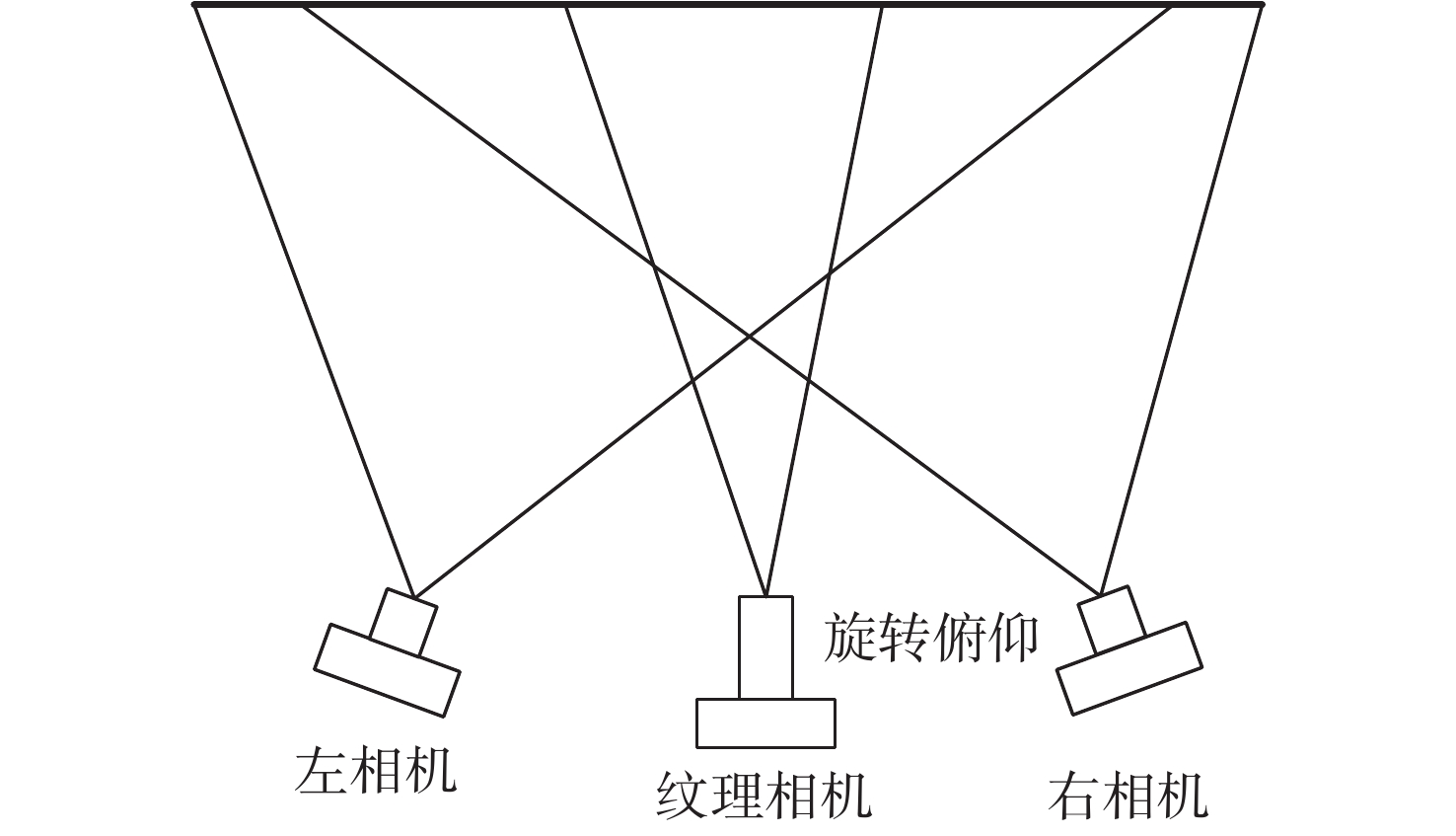
图 1 高分辨率纹理三维成像系统结构示意图
Figure 1. Structure diagram of 3D imaging system with high-resolution texture
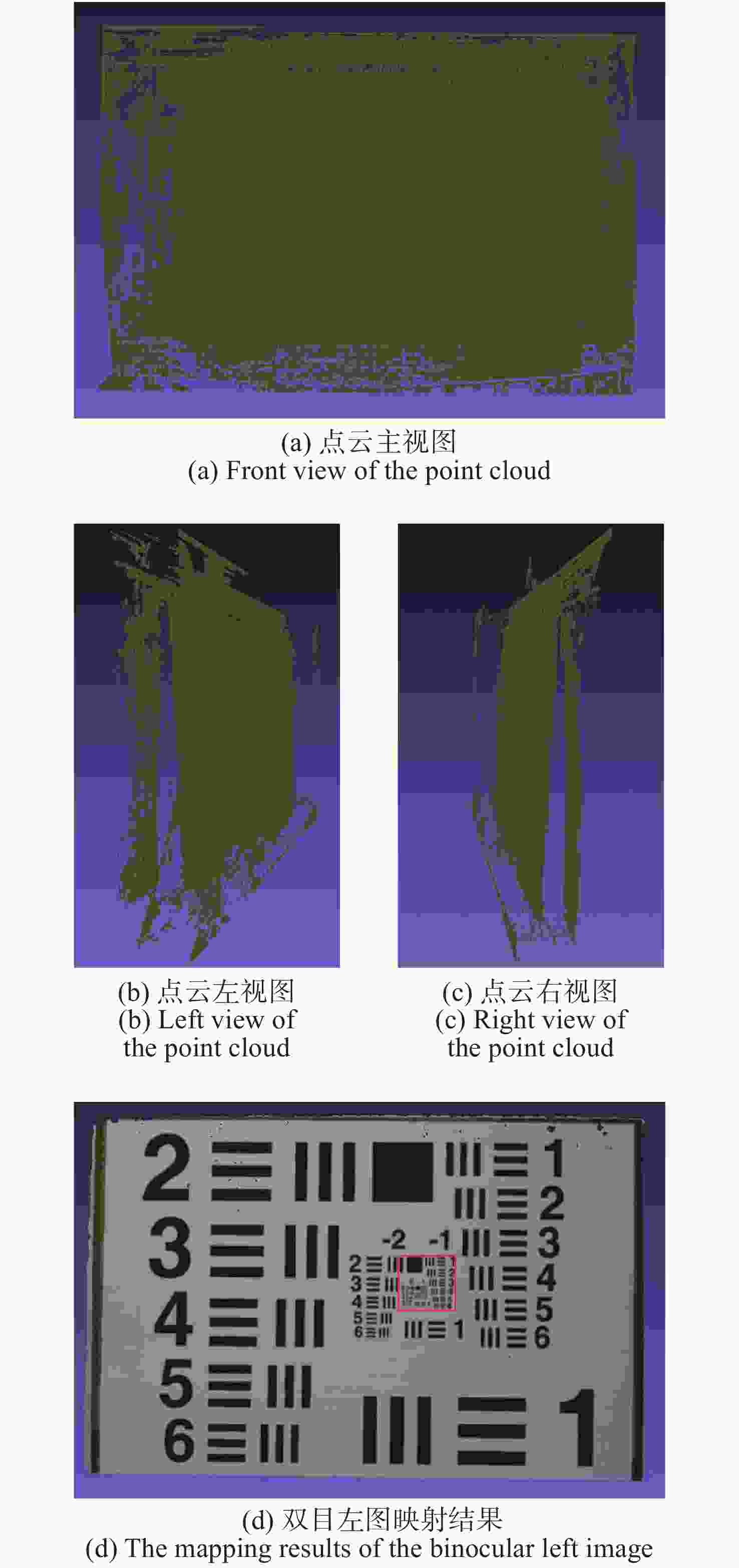
图 8 重建点云及双目左图映射结果
Figure 8. Reconstructed point cloud and the mapping results of the binocular left image
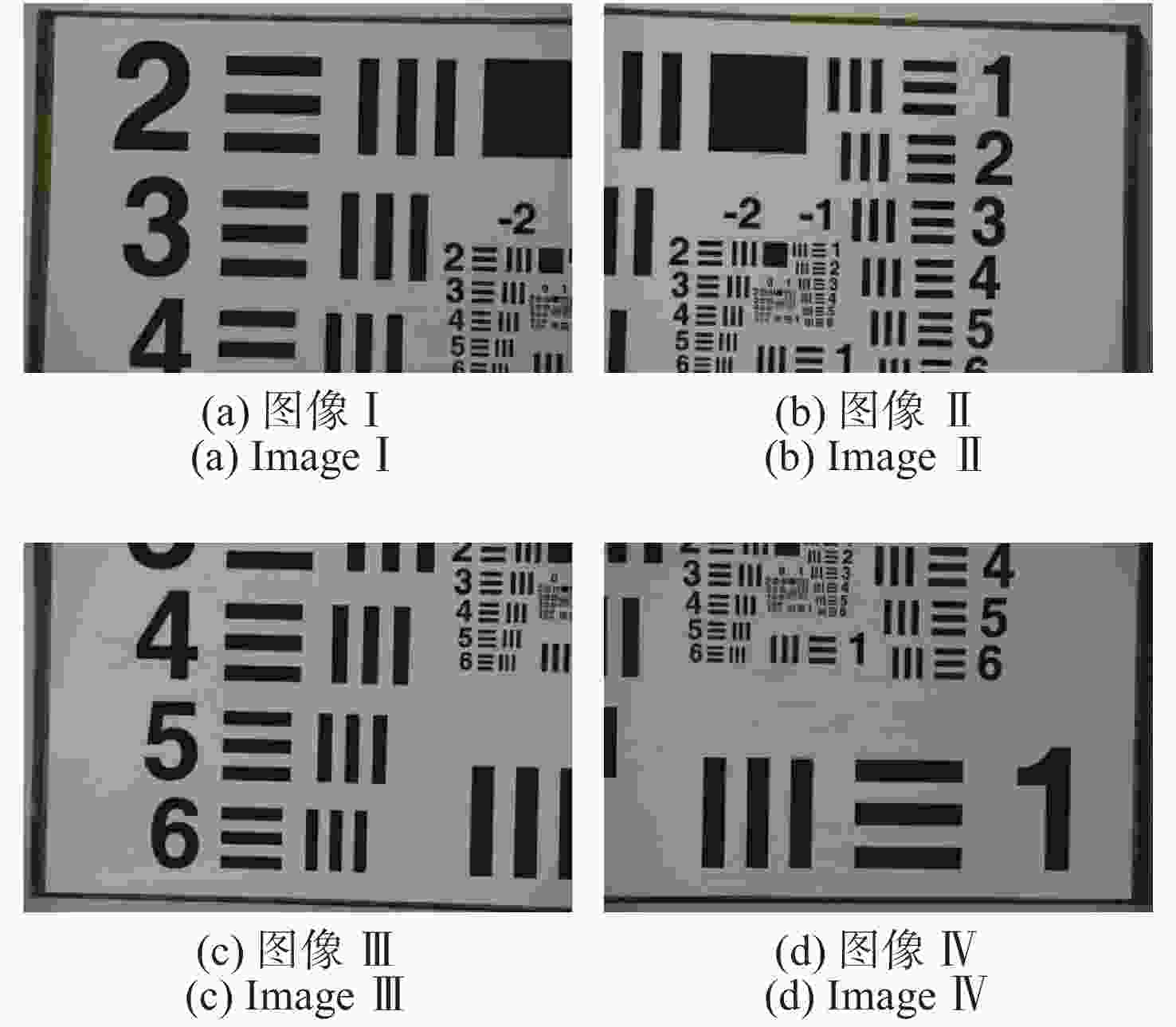
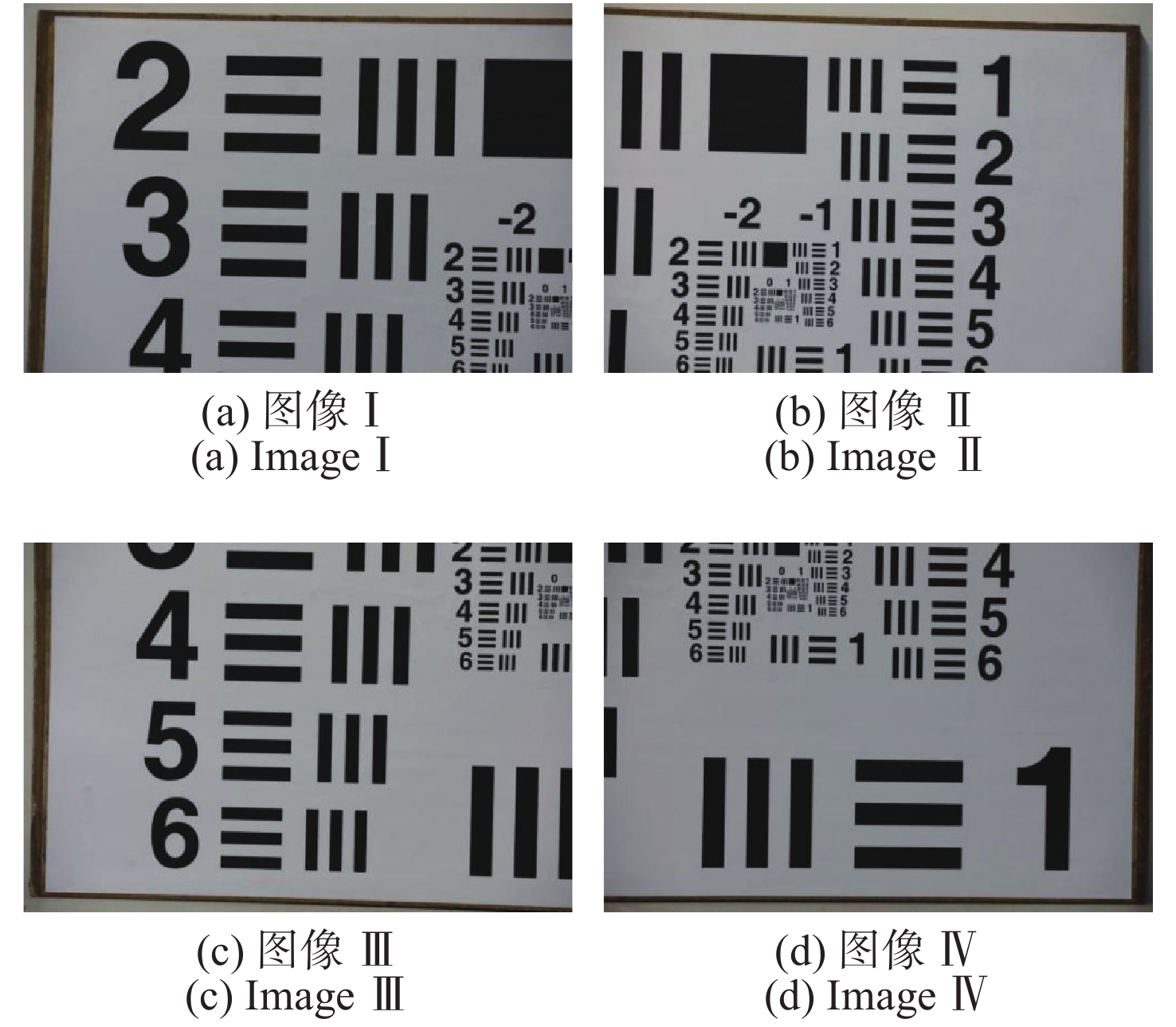
图 10 纹理相机拍摄得到的高分辨率纹理图像
Figure 10. High-resolution texture images obtained by the texture camera
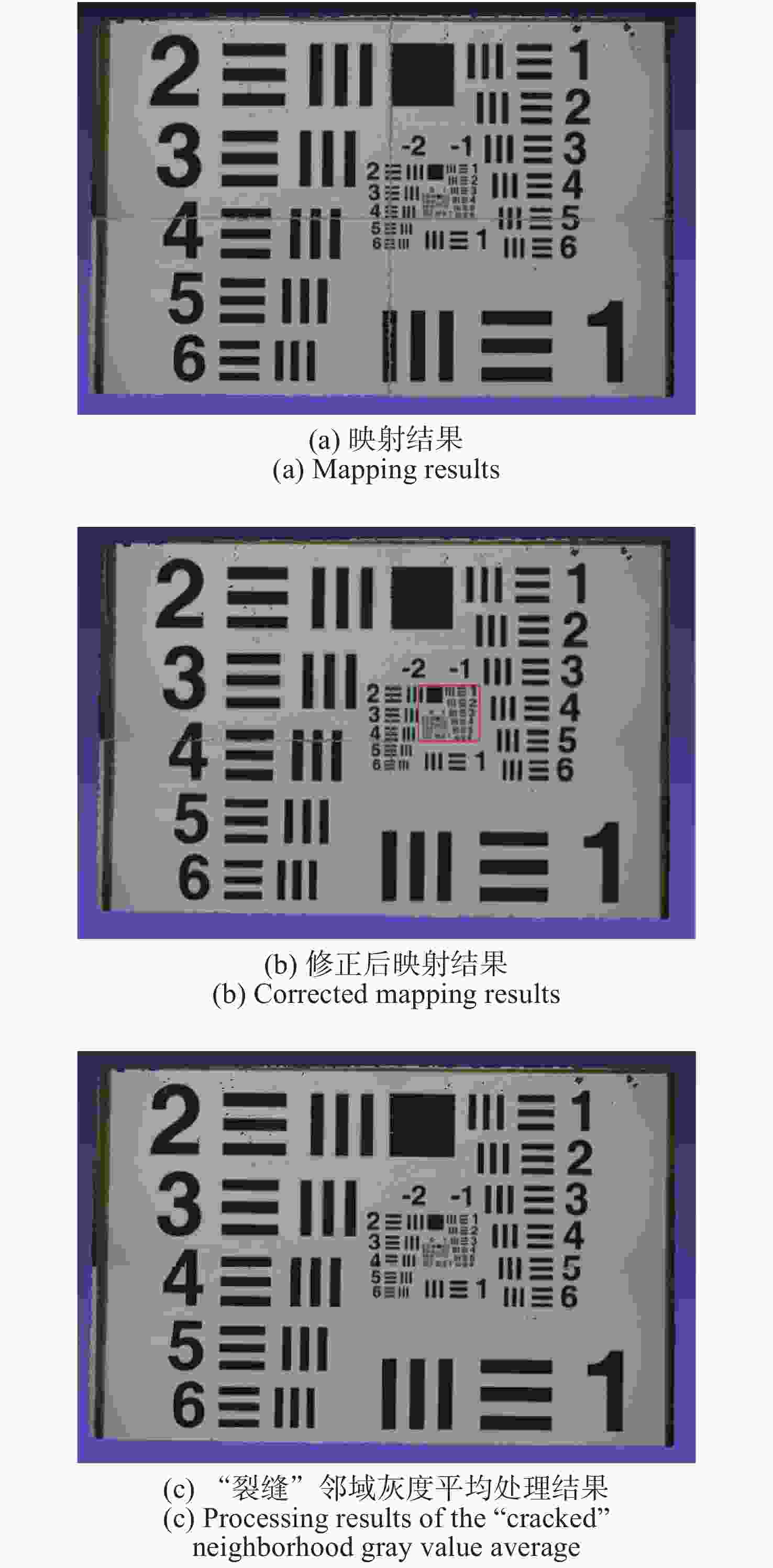
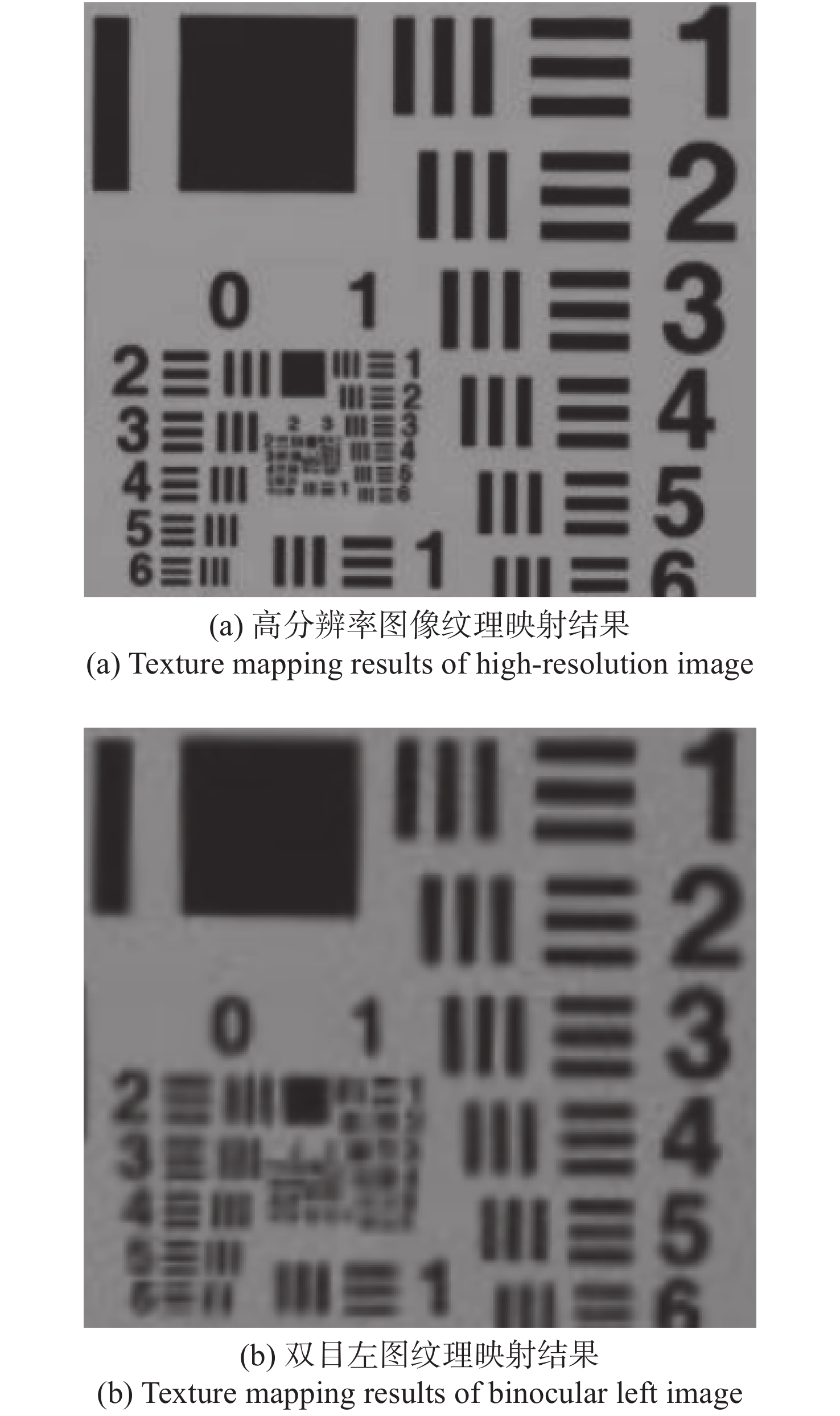
图 11 多视高分辨率图像纹理映射结果
Figure 11. Texture mapping results of multi-view high-resolution images
-
HENG Y SH, WANG CH, QI Y. Key frame-based texture mapping for RGBD human reconstruction[C]. Proceedings of 2018 International Conference on Virtual Reality and Visualization (ICVRV), IEEE, 2018: 1-7. 杨国林, 韩峰, 王丹英. 基于三维激光扫描技术的工程施工测量应用研究[J]. 中国水能及电气化,2015(2):20-23. doi: 10.3969/j.issn.1673-8241.2015.02.006YANG G L, HAN F, WANG D Y. Application research of engineering construction measurement based on three-dimensional laser scanning technology[J]. China Water Power &Electrification, 2015(2): 20-23. (in Chinese) doi: 10.3969/j.issn.1673-8241.2015.02.006 纪文丽. 基于光栅投影方法的物体三维轮廓重构[D]. 大连: 大连理工大学, 2007.JI W L. Three dimensional profile reconstruction based on fringe projection[D]. Dalian: Dalian University of Technology, 2007. (in Chinese) ZHU SH P, GAO Y. Noncontact 3-D coordinate measurement of cross-cutting feature points on the surface of a large-scale workpiece based on the machine vision method[J]. IEEE Transactions on Instrumentation and Measurement, 2010, 59(7): 1874-1887. doi: 10.1109/TIM.2009.2030875 郑少开, 卢启生, 张瑞菊, 等. 基于三维网格模型的点云分割方法[J]. 北京测绘,2019,33(8):916-919.ZHENG SH K, LU Q SH, ZHANG R J, et al. Segmentation of point cloud based on 3D mesh model[J]. Beijing Surveying and Mapping, 2019, 33(8): 916-919. (in Chinese) 王莹, 王延杰, 周渝人, 等. 基于参数平面的自适应调和纹理映射算法[J]. 液晶与显示,2014,29(5):818-823. doi: 10.3788/YJYXS20142905.0818WANG Y, WANG Y J, ZHOU Y R, et al. Adaptive harmonic texture mapping algorithm based on harmonic parameter plane[J]. Chinese Journal of Liquid Crystals and Displays, 2014, 29(5): 818-823. (in Chinese) doi: 10.3788/YJYXS20142905.0818 HALLER H L, DIRNBERGER J, GIRETZLEHNER M, et al. “Understanding burns”: research project burn case 3D—overcome the limits of existing methods in burns documentation[J]. Burns, 2009, 35(3): 311-317. doi: 10.1016/j.burns.2008.07.010 万燕, 王慧洁, 鲁俊. 基于三角网格模型的纹理映射研究[J]. 计算机应用与软件,2016,33(4):160-163, 201. doi: 10.3969/j.issn.1000-386x.2016.04.038WAN Y, WANG H J, LU J. On texture mapping based on triangular mesh model[J]. Computer Applications and Software, 2016, 33(4): 160-163, 201. (in Chinese) doi: 10.3969/j.issn.1000-386x.2016.04.038 LIU L, STAMOS I. Automatic 3D to 2D registration for the photorealistic rendering of urban scenes[C]. Proceedings of 2005 IEEE Computer Society Conference on Computer Vision & Pattern Recognition, IEEE, 2005: 137-143. 杨丽萍. 文物模型的简化与纹理映射研究[J]. 液晶与显示,2009,24(2):283-287. doi: 10.3969/j.issn.1007-2780.2009.02.025YANG L P. Simplification and texture mapping of cultural relic model[J]. Chinese Journal of Liquid Crystals and Displays, 2009, 24(2): 283-287. (in Chinese) doi: 10.3969/j.issn.1007-2780.2009.02.025 孙宇臣. 激光三维彩色数字化系统关键技术研究[D]. 天津: 天津大学, 2005.SUN Y CH. Study of key techniques of laser 3D and color digitization system[D]. Tianjin: Tianjin University, 2005. (in Chinese) 孙新领, 谭志伟, 杨观赐. 双目立体视觉在人形机器人三维重建中的应用[J]. 现代电子技术,2016,39(8):80-84, 87.SUN X L, TAN ZH W, YANG G C. Application of binocular stereo vision in 3D reconstruction of humanoid robot[J]. Modern Electronics Technique, 2016, 39(8): 80-84, 87. (in Chinese) 王晓南, 郑顺义. 基于激光扫描和高分辨率影像的文物三维重建[J]. 测绘工程,2009,18(6):53-55, 60. doi: 10.3969/j.issn.1006-7949.2009.06.015WANG X N, ZHENG SH Y. Three-dimensional reconstruction of antiques based on LIDAR and high-resolution images[J]. Engineering of Surveying and Mapping, 2009, 18(6): 53-55, 60. (in Chinese) doi: 10.3969/j.issn.1006-7949.2009.06.015 赵琳敬. 三维点云智能进化拼接与表面纹理映射方法研究[D]. 天津: 天津大学, 2018.ZHAO L J. Research on 3D point cloud intelligent evolutionary registration and surface texture mapping method[D]. Tianjin: Tianjin University, 2018. (in Chinese) ZHANG ZH Y. A flexible new technique for camera calibration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(11): 1330-1334. doi: 10.1109/34.888718 杨景豪, 刘巍, 刘阳, 等. 双目立体视觉测量系统的标定[J]. 光学精密工程,2016,24(2):300-308. doi: 10.3788/OPE.20162402.0300YANG J H, LIU W, LIU Y, et al. Calibration of binocular vision measurement system[J]. Optics and Precision Engineering, 2016, 24(2): 300-308. (in Chinese) doi: 10.3788/OPE.20162402.0300 TSAI R Y. A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the-shelf TV cameras and lenses[J]. IEEE Journal on Robotics and Automation, 1987, 3(4): 323-344. doi: 10.1109/JRA.1987.1087109 KAEHLER A, BRADSKI G. Learning Open CV 3: Computer Vision in C++with the OpenCV Library[M]. Sebastopol: O'Reilly Media, Inc., 2016. 张来刚, 魏仲慧, 何昕, 等. 面向低纹理图像的快速立体匹配[J]. 液晶与显示,2013,28(3):450-458. doi: 10.3788/YJYXS20132803.0450ZHANG L G, WEI ZH H, HE X, et al. New stereo matching method based edge extraction[J]. Chinese Journal of Liquid Crystals and Displays, 2013, 28(3): 450-458. (in Chinese) doi: 10.3788/YJYXS20132803.0450 汪泽伟, 于有光, 杨付正. 基于HTC Vive的全景视频显示质量评估[J]. 液晶与显示,2018,33(1):85-91. doi: 10.3788/YJYXS20183301.0085WANG Z W, YU Y G, YANG F ZH. Panoramic video display quality assessment based on HTC Vive[J]. Chinese Journal of Liquid Crystals and Displays, 2018, 33(1): 85-91. (in Chinese) doi: 10.3788/YJYXS20183301.0085 ZHANG G X, ZENG ZH, ZHANG SH W, et al. SIFT matching with CNN evidences for particular object retrieval[J]. Neurocomputing, 2017, 238: 399-409. doi: 10.1016/j.neucom.2017.01.081 张昊骕, 朱晓龙, 胡新洲, 等. 基于SURF和SIFT特征的视频镜头分割算法[J]. 液晶与显示,2019,34(5):521-529. doi: 10.3788/YJYXS20193405.0521ZHANG H S, ZHU X L, HU X ZH, et al. Shot segmentation technology based on SURF features and SIFT features[J]. Chinese Journal of Liquid Crystals and Displays, 2019, 34(5): 521-529. (in Chinese) doi: 10.3788/YJYXS20193405.0521 LOWE D G. Object recognition from local scale-invariant features[C]. Proceedings of IEEE International Conference on Computer Vision, IEEE, 1999: 1150-1157. BAY H, TUYTELAARS T, VAN GOOL L. Surf: speeded up robust features[C]. Proceedings of the European Conference on Computer Vision, Springer, 2006, 3951: 404-417. RUBLEE E, RABAUD V, KONOLIGE K, et al.. ORB: an efficient alternative to SIFT or SURF[C]. Proceedings of 2011 International Conference on Computer Vision, IEEE, 2011: 2564-2571. -

 下载:
下载:






图(12)
计量
- 文章访问数: 2664
- HTML全文浏览量: 743
- PDF下载量: 193
- 被引次数: 0
