


-
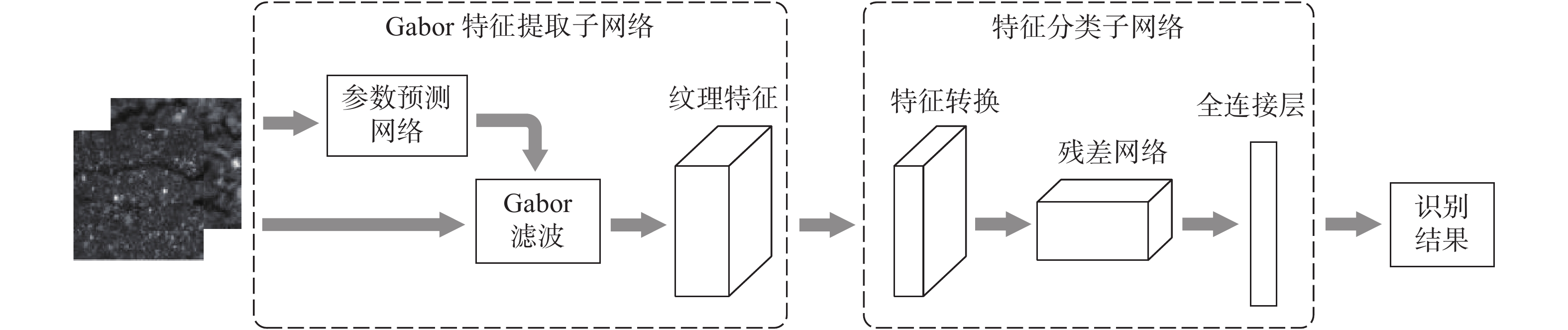
摘要: 针对神经网络难以从数据量较少、较单一的路面裂缝图像中提取有效特征的局限性,设计了一种融合Gabor滤波器的卷积神经网络模型(Gabor Filter Convolutional Neural Network,GF-CNN)以进行路面裂缝检测。GF-CNN模型首先将路面图像输入小型参数预测网络中,依据输入图像自适应地选取Gabor滤波器组的参数,并根据所预测参数构建滤波器组对初始路面图像进行滤波,得到Gabor纹理特征图。将纹理特征图输入至基于残差网络构建的特征分类网络中提取深层特征,判断其是否包含裂缝。在GAPs路面图像数据集上的测试结果表明,GF-CNN模型的F1分数达到0.7137,优于其他路面图像检测方法。该模型通过融合纹理特征改善CNN特征提取能力,同时降低Gabor滤波器参数敏感性以提高模型泛化能力,对于路面裂缝图像具有良好的适用性。Abstract: In pavement detection, the small sample of road crack image data makes it difficult for neural networks to extract useful features from images. To solve this problem, this paper proposes a Gabor Filter Convolutional Neural Network (GF-CNN) model. The GF-CNN model first inputs a road surface image into a small parameter prediction network, adaptively selects the parameters of the Gabor filter bank according to the input, and constructs a filter bank according to the predicted parameters, and then filters the initial road surface image to obtain the Gabor texture feature map. The texture feature map is inputted into a feature classification network constructed by the residual network to extract deep features, at the same time, to judge whether a crack exists. Test results on the GAPs pavement image dataset show that the F1 score of the GF-CNN model reaches 0.7137, which is superior to other pavement image detection methods. This model improves the feature extraction ability of CNNs by fusing texture features, and reduces the sensitivity of Gabor filter parameters to improve its ability to make generalizations. It has good applicability to pavement crack image detection.
-
Key words:
- convolutional neural network /
- Gabor filter /
- crack detection /
- texture feature
-

图 1 AlexNet学习的第一层卷积层参数及Gabor滤波器组
Figure 1. Parameters of the first convolutional layer of AlexNet filters and Gabor filters
表 1 Gabor参数预测网络结构
Table 1. Prediction network structure of Gabor parameter
名称 类型 步长/像素 输出特征图尺寸/pixel 特征图通道数 输入层 — — 64×64 1 卷积层 Conv 7×7 1 64×64 8 激活层 ReLU — 64×64 8 最大池化层 2×2 2 32×32 8 卷积层 Conv 3×3 1 32×32 16 激活层 ReLU — 32×32 16 最大池化层 2×2 2 16×16 16 卷积层 Conv 3×3 1 16×16 32 激活层 ReLU — 16×16 32 最大池化层 2×2 2 8×8 32 全连接层 — — — 96 激活层 Sigmoid — — 96  下载: 导出CSV
下载: 导出CSV
表 2 裂缝检测模型对比实验结果
Table 2. Comparison of experimental results of crack detection models
精度 召回率 F1 CrackIT 0.4694 0.5394 0.4882 ASINVOS 0.6113 0.4994 0.5497 ResNet 0.6837 0.5750 0.6246 GF-CNN 0.8003 0.6441 0.7137
下载: 导出CSV
-
[1] SHAO CH, CHEN Y H, XU F H, et al.. A kind of pavement crack detection method based on digital image processing[C]. Proceedings of 2019 IEEE 4th Advanced Information Technology, Electronic and Automation Control Conference, IEEE, 2019: 397-401. [2] MANDAL V, UONG L, ADU-GYAMFI Y. Automated road crack detection using deep convolutional neural networks[C]. Proceedings of 2018 IEEE International Conference on Big Data, IEEE, 2018: 5212-5215. [3] CHRISTODOULOU S E, HADJIDEMETRIOU G M, KYRIAKOU C. Pavement defects detection and classification using smartphone-based vibration and video signals[M]. SMITH I F C, DOMER B. Advanced Computing Strategies for Engineering. Cham: Springer, 2018: 125-138. [4] KOMORI T, MATSUSHIMA K, TAKAHASHI O. Automatic pavement crack detection using multi-scale image & neighborhoods information[C]. Proceedings of 2019 International Conference on Mechatronics, Robotics and Systems Engineering, IEEE, 2019: 227-232. [5] 杨会玲, 崔洪恩, 孙慧婷, 等. 多尺度矩阵滤波的路面裂缝检测方法研究[J]. 液晶与显示,2016,31(8):778-783. doi: 10.3788/YJYXS20163108.0778YANG H L, CUI H E, SUN H T, et al. Method for pavement cracks detection based on multi-scale matrix filtering[J]. Chinese Journal of Liquid Crystals and Displays, 2016, 31(8): 778-783. (in Chinese) doi: 10.3788/YJYXS20163108.0778 [6] CHEN C, SEO H S, ZHAO Y, et al.. Automatic pavement crack detection based on image recognition[C]. Proceedings of International Conference on Smart Infrastructure and Construction 2019, ICE, 2019: 361-369. [7] 陈建立. 基于图像处理方法的混凝土检测方法[J]. 液晶与显示,2020,35(4):395-401. doi: 10.3788/YJYXS20203504.0395CHEN J L. Concrete detection method based on image processing[J]. Chinese Journal of Liquid Crystals and Displays, 2020, 35(4): 395-401. (in Chinese) doi: 10.3788/YJYXS20203504.0395 [8] OLIVEIRA H, CORREIA P L. Automatic road crack segmentation using entropy and image dynamic thresholding[C]. Proceedings of 2009 17th European Signal Processing Conference, IEEE, 2009: 622-626. [9] KIM H, KIM H, HONG Y W, et al. Detecting construction equipment using a region-based fully convolutional network and transfer learning[J]. Journal of Computing in Civil Engineering, 2018, 32(2): 04017082. doi: 10.1061/(ASCE)CP.1943-5487.0000731 [10] 马浩鹏, 朱春媚, 周文辉, 等. 基于深度学习的乳液泵缺陷检测算法[J]. 液晶与显示,2019,34(1):81-89. doi: 10.3788/YJYXS20193401.0081MA H P, ZHU CH M, ZHOU W H, et al. Defect detection algorithm of lotion pump based on deep learning[J]. Chinese Journal of Liquid Crystals and Displays, 2019, 34(1): 81-89. (in Chinese) doi: 10.3788/YJYXS20193401.0081 [11] 周筑博, 高佼, 张巍, 等. 基于深度卷积神经网络的输电线路可见光图像目标检测[J]. 液晶与显示,2018,33(4):317-325. doi: 10.3788/YJYXS20183304.0317ZHOU ZH B, GAO J, ZHANG W, et al. Object detection of transmission line visual images based on deep convolutional neural network[J]. Chinese Journal of Liquid Crystals and Displays, 2018, 33(4): 317-325. (in Chinese) doi: 10.3788/YJYXS20183304.0317 [12] ZHANG L, YANG F, ZHANG Y D, et al.. Road crack detection using deep convolutional neural network[C]. Proceedings of 2016 IEEE International Conference on Image Processing, IEEE, 2016: 3708-3712. [13] PARK S, BANG S, KIM H, et al. Patch-based crack detection in black box images using convolutional neural networks[J]. Journal of Computing in Civil Engineering, 2019, 33(3): 04019017. doi: 10.1061/(ASCE)CP.1943-5487.0000831 [14] MAEDA H, SEKIMOTO Y, SETO T, et al. Road damage detection and classification using deep neural networks with smartphone images[J]. Computer-Aided Civil and Infrastructure Engineering, 2018, 33(12): 1127-1141. doi: 10.1111/mice.12387 [15] 刘康, 陈小林, 刘岩俊, 等. 基于Gabor和灰度共生矩阵混合特征叶片泵装配质量检测[J]. 液晶与显示,2018,33(11):936-942. doi: 10.3788/YJYXS20183311.0936LIU K, CHEN X L, LIU Y J, et al. Vane pump assembly quality detection based on Gabor and gray level co-occurrence matrix hybrid characteristics[J]. Chinese Journal of Liquid Crystals and Displays, 2018, 33(11): 936-942. (in Chinese) doi: 10.3788/YJYXS20183311.0936 [16] ISAVAND RAHMANI A, AKBARI H, ESMAILI S S. Retinal blood vessel segmentation using Gabor filter and morphological reconstruction[J]. Signal Processing and Renewable Energy, 2020, 4(1): 77-88. [17] MEDINA R, LLAMAS J, GÓMEZ-GARCÍA-BERMEJO J, et al. Crack detection in concrete tunnels using a gabor filter invariant to rotation[J]. Sensors, 2017, 17(7): 1670. doi: 10.3390/s17071670 [18] SALMAN M, MATHAVAN S, KAMAL K, et al.. Pavement crack detection using the Gabor filter[C]. Proceedings of 16th International IEEE Conference on Intelligent Transportation Systems, IEEE, 2013: 2039-2044. [19] SIMONYAN K, ZISSERMAN A. Very deep convolutional networks for large-scale image recognition[C]. 3rd International Conference on Learning Representations, ICLR 2015. [20] DAGHER I, ABUJAMRA S. Combined wavelet and Gabor convolution neural networks[J]. International Journal of Wavelets,Multiresolution and Information Processing, 2019, 17(6): 1950046. doi: 10.1142/S0219691319500462 [21] 孔锐, 张冰. Gabor滤波器参数设置[J]. 控制与决策,2012,27(8):1277-1280.KONG R, ZHANG B. Design of Gabor filters’ parameter[J]. Control and Decision, 2012, 27(8): 1277-1280. (in Chinese) [22] KRIZHEVSKY A, SUTSKEVER I, HINTON G E. ImageNet classification with deep convolutional neural networks[C]. Proceedings of the 25th International Conference on Neural Information Processing Systems, ACM, 2012: 1097-1105. [23] DENG J, DONG W, SOCHER R, et al.. ImageNet: a large-scale hierarchical image database[C]. Proceedings of 2009 IEEE Conference on Computer Vision and Pattern Recognition, IEEE, 2009: 248-255. [24] LUAN SH ZH, CHEN CH, ZHANG B CH, et al. Gabor convolutional networks[J]. IEEE Transactions on Image Processing, 2018, 27(9): 4357-4366. doi: 10.1109/TIP.2018.2835143 [25] 李良福, 马卫飞, 李丽, 等. 基于深度学习的桥梁裂缝检测算法研究[J]. 自动化学报,2019,45(9):1727-1742.LI L F, MA W F, LI L, et al. Research on detection algorithm for bridge cracks based on deep learning[J]. Acta Automatica Sinica, 2019, 45(9): 1727-1742. (in Chinese) [26] IOFFE S, SZEGEDY C. Batch normalization: accelerating deep network training by reducing internal covariate shift[C]. Proceedings of the 32nd International Conference on International Conference on Machine Learning, ACM, 2015: 448-456. [27] HE K M, ZHANG X Y, REN SH Q, et al.. Deep residual learning for image recognition[C]. Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition, IEEE, 2016: 770-778. [28] EISENBACH M, STRICKER R, SEICHTER D, et al.. How to get pavement distress detection ready for deep learning? A systematic approach[C]. Proceedings of 2017 International Joint Conference on Neural Networks, IEEE, 2017: 2039-2047. [29] OLIVEIRA H, CORREIA P L. CrackIT—An image processing toolbox for crack detection and characterization[C]. Proceedings of 2014 IEEE International Conference on Image Processing, IEEE, 2014: 798-802. -

 下载:
下载:



图(5) / 表(2)
计量
- 文章访问数: 2845
- HTML全文浏览量: 938
- PDF下载量: 143
- 被引次数: 0
