


-
摘要: 针对机器视觉检测技术在缸体内表面横孔检测应用中存在的光源设计复杂、照度均匀性差等问题,本文提出一种以LED为直接光源在缸体内部照射横孔,以积分球为背景光源在缸体外部照射横孔的双光源照明方法。本文以缸体内横孔光照均匀性为出发点,建立光源辐射响应数学模型,分析了光源大小、距离、缸体受光点与光照均匀性的关系,并结合成像法介绍了缸体横孔照度均匀性评估方法。最后,通过实验对比分析了光纤光源、LED光源、LED+积分球光源在缸体横孔检测中的光照均匀性。实验数据显示,采用LED光源从外部照射横孔时光照不均匀度达10%,从内部照明时光照不均匀度为5%;采用光纤光源从内部照射横孔时光照不均匀度为4.6%;而采用积分球在缸体外部照射横孔,同时在缸体内部使用LED照明时,光照不均匀度为0.6%。可见采用LED+积分球双光源照明方法可以获得大于99%的光照均匀性,能够较好地满足机器视觉检测照明要求。Abstract: In view of the complex design of light sources and the poor illumination uniformity in cylinder block transverse hole detection by using machine vision, a double light source method is provided for the detection of transverse holes. In this method, an integrating sphere is used as the background light source and an LED is used as the direct light source. To achieve uniformity of illumination on the cylinder transverse hole, a mathematical model of the light source radiation response is established in this paper. Using this imaging method, a relationship between the size of the light source, its distance and the position of the reflection point and illumination uniformity is proposed. Finally, a controlled experiment was performed to reveal the illumination uniformity developed in different light sources: an optical fiber source, an LED source, and an LED + integrating sphere source. The results of the experiment show that the non-uniformity is up to 10% with an LED light source emitting from outside the hole, and it becomes 5% when the LED light is moved to the inside of the hole; the non-uniformity of an internal optical fiber light source is 4.6%. In particular, the double light source, wherein the integrating sphere is used as a background light outside the cylinder block and the LED is used as a direct light inside the cylinder block has a non-uniformity of 0.6%. The uniformity illumination surpasses 99%, which can be obtained by using an integrating sphere and LED dual light source, meeting our requirements for machine vision detection.
-
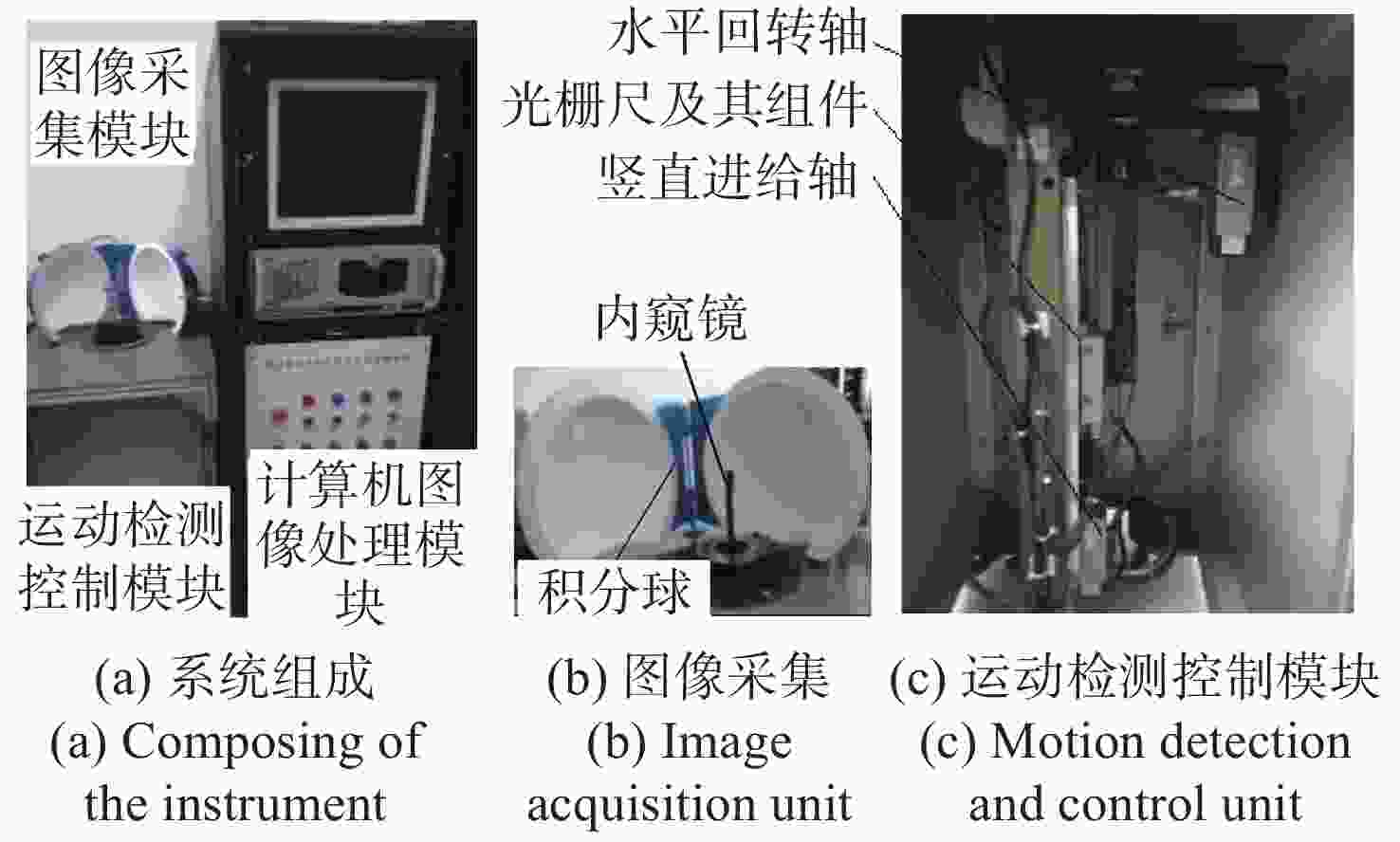
图 2 制动主缸补偿孔检测系统组成
Figure 2. Composing of compensation hole measuring system for the brake master cylinder
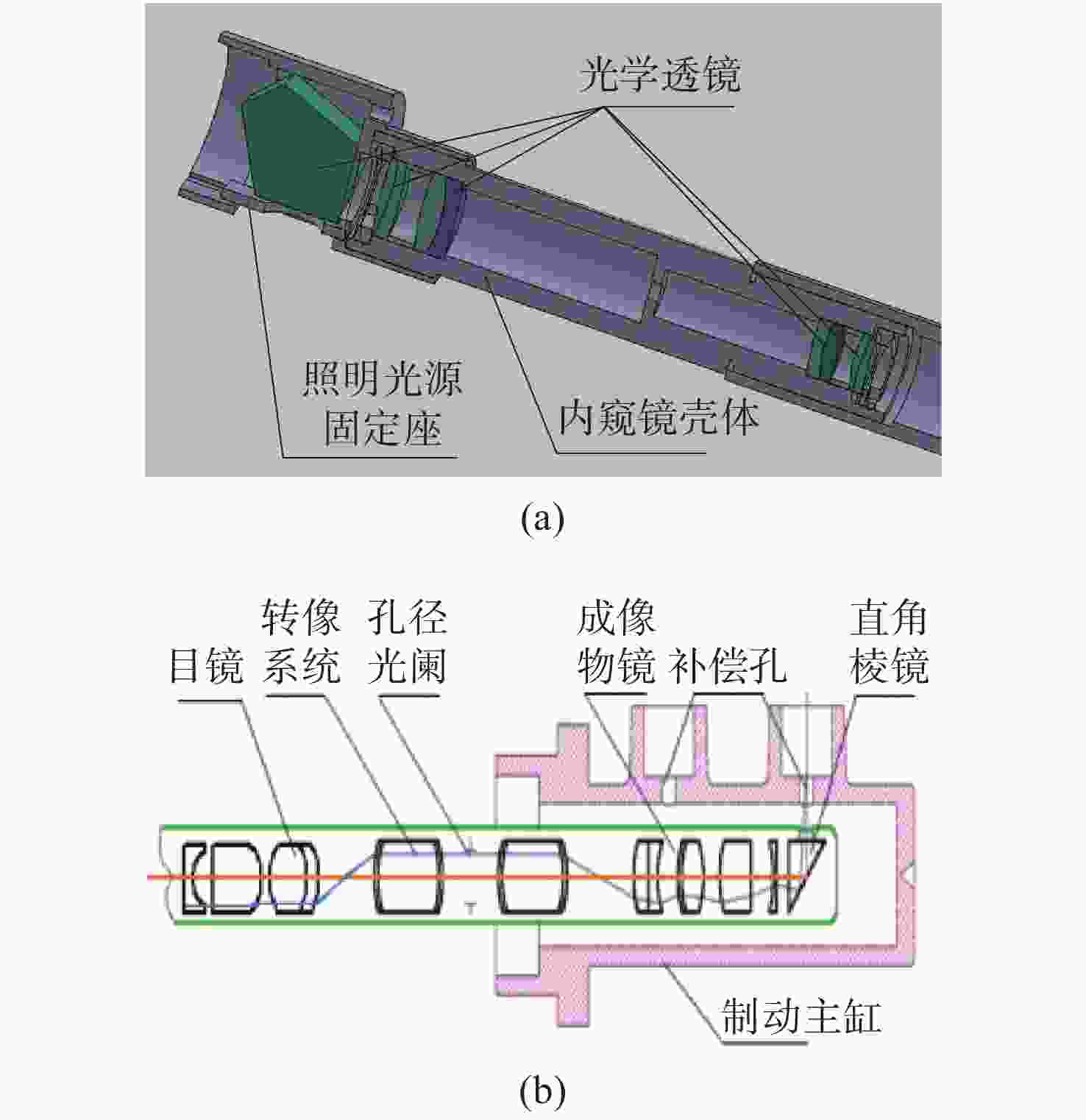
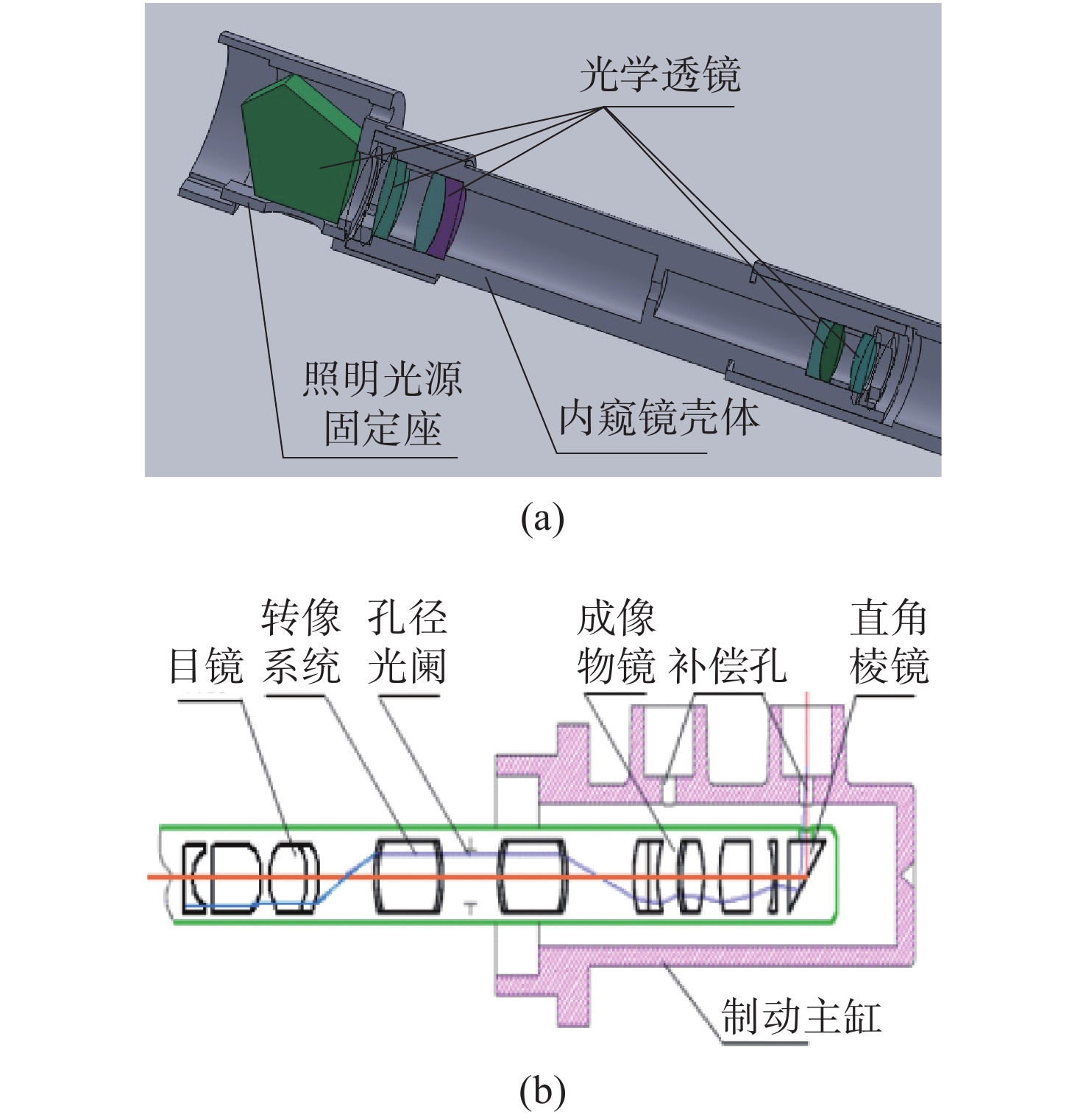
图 3 (a)内窥镜结构示意图及(b)补偿孔检测结构示意图
Figure 3. Structure diagram of (a) the endoscope and (b) the compensation hole detection system
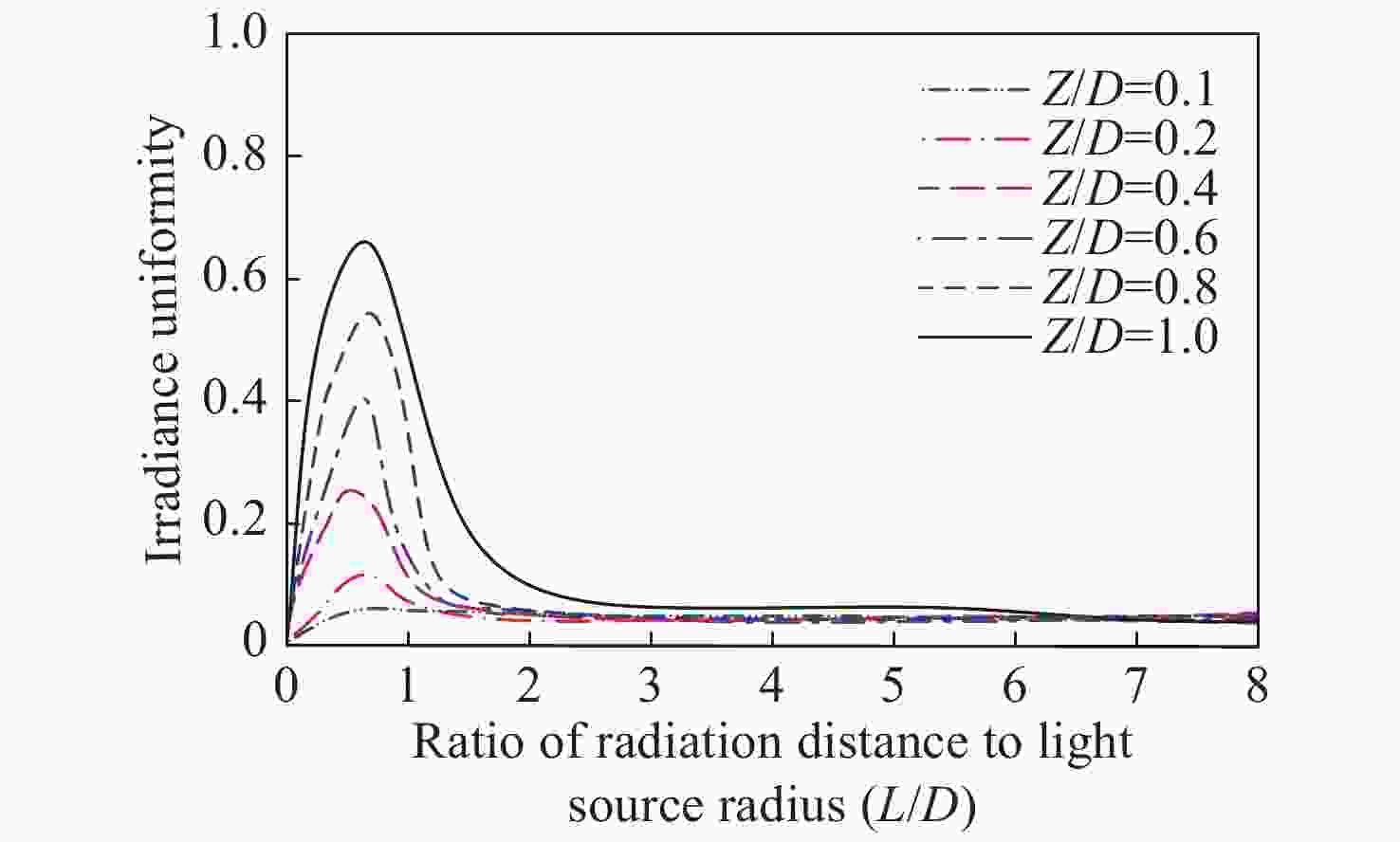
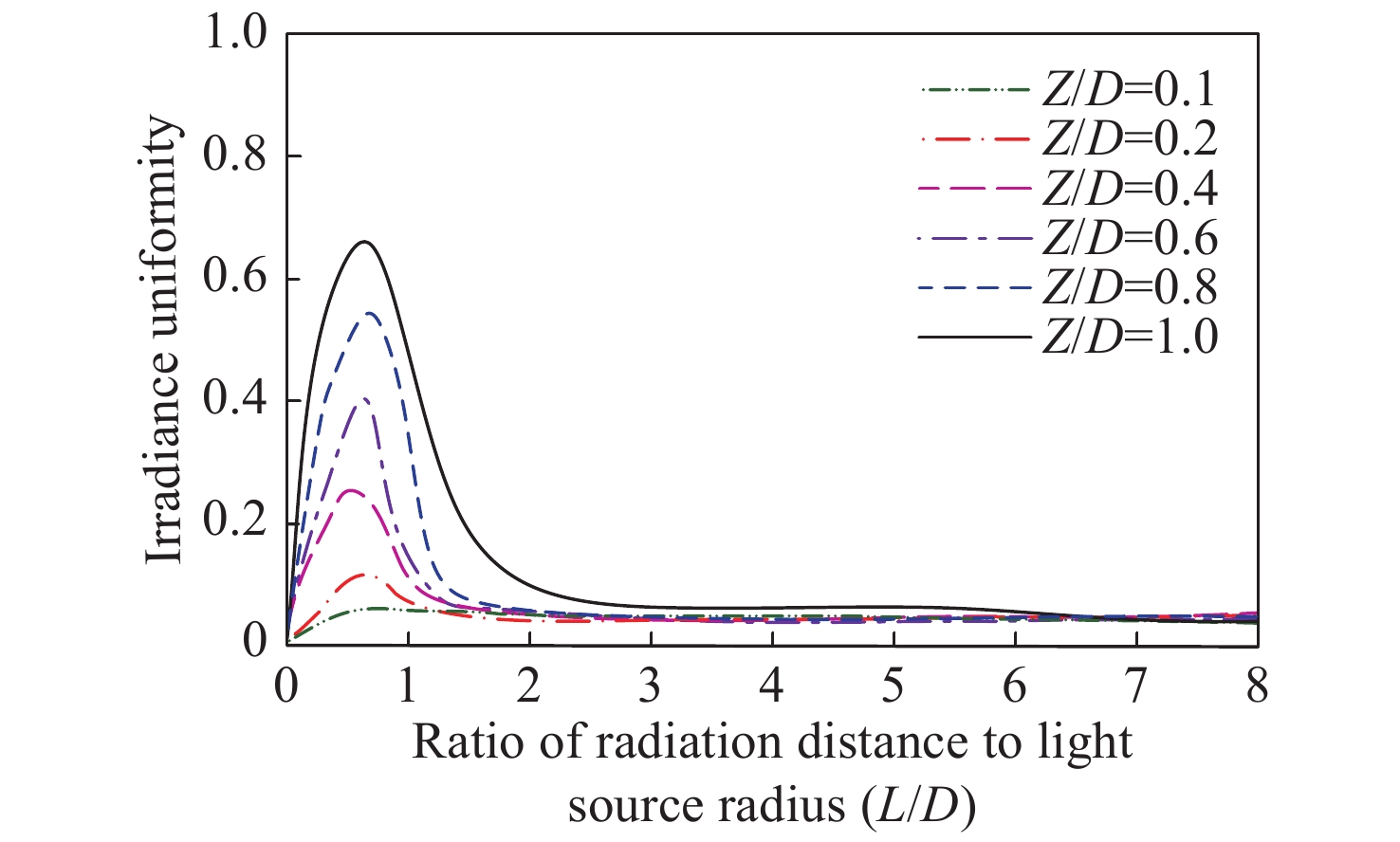
图 5 缸体内表面辐射响应曲线
Figure 5. Irradiance uniformity distribution on the internal surface of the cylinder
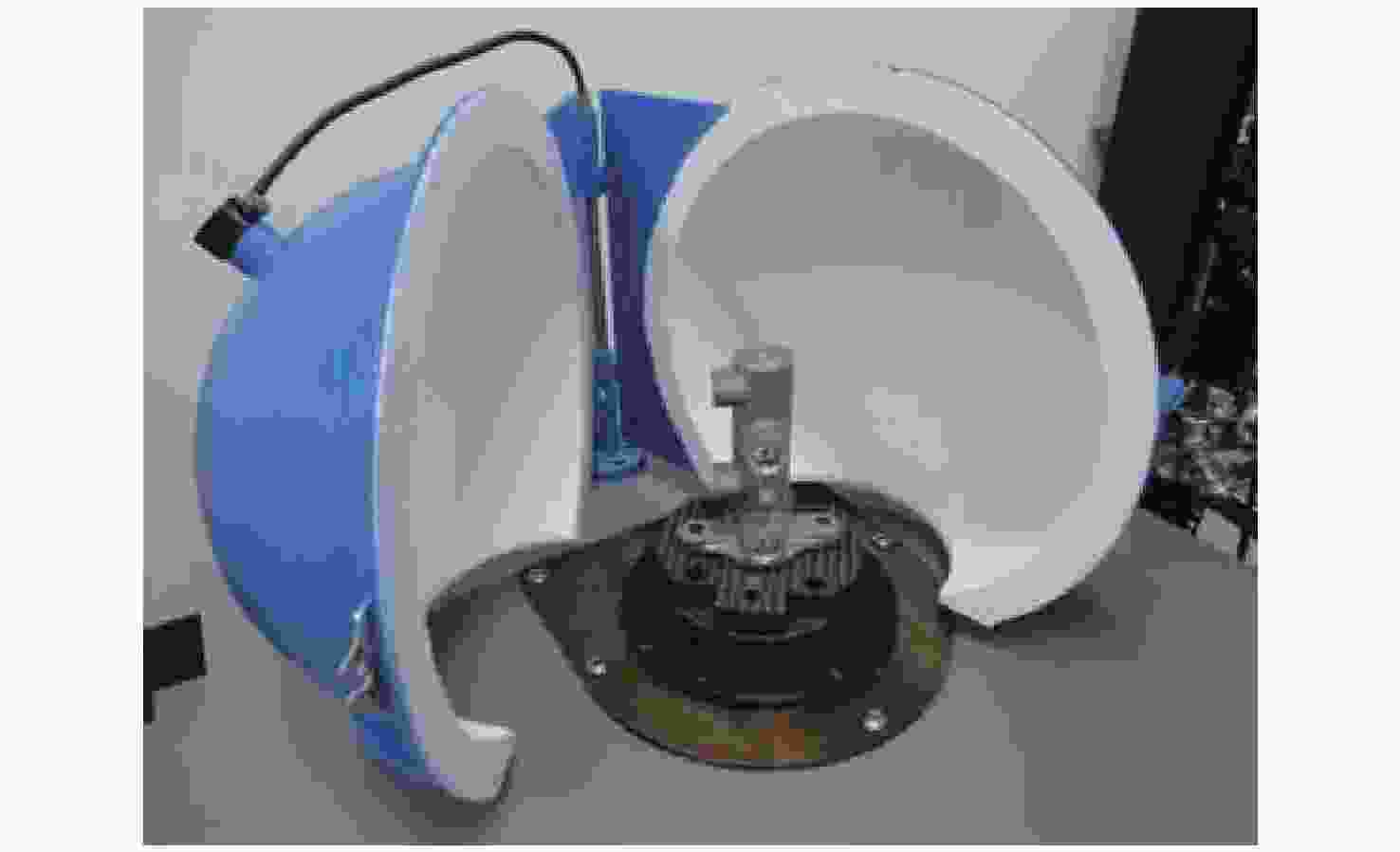
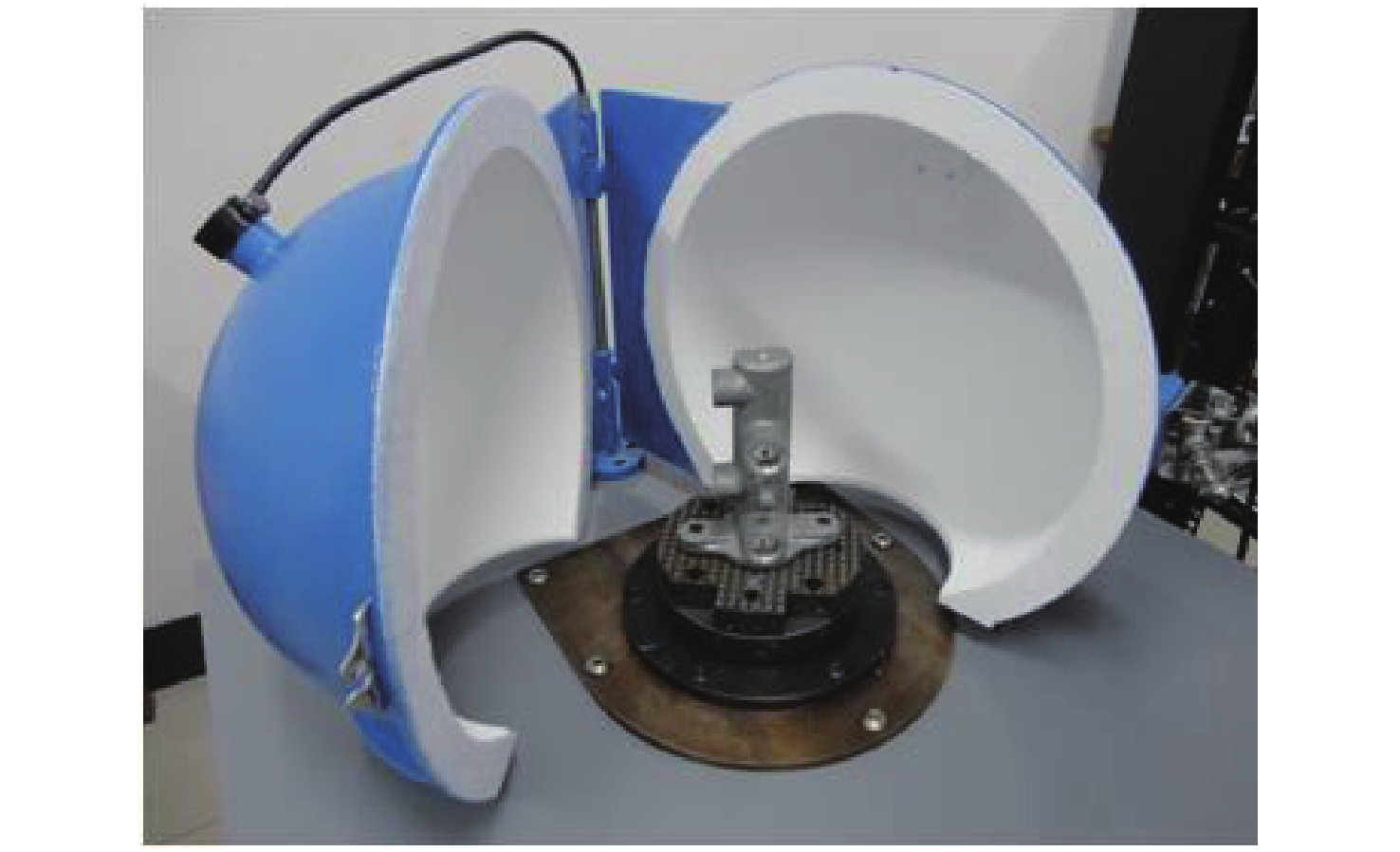
图 9 积分球+LED照明装置
Figure 9. Integrating sphere background source + LED direct light source
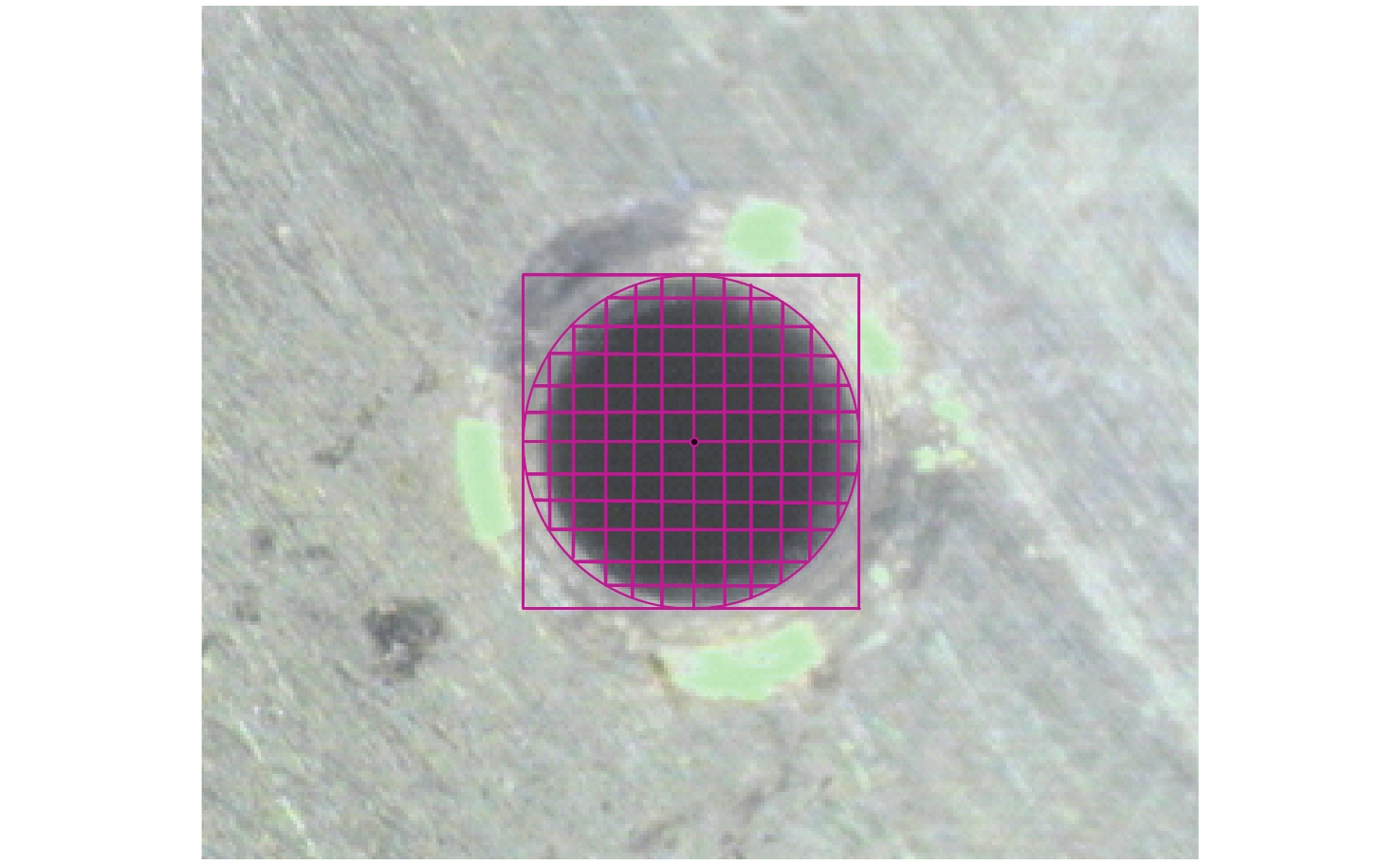
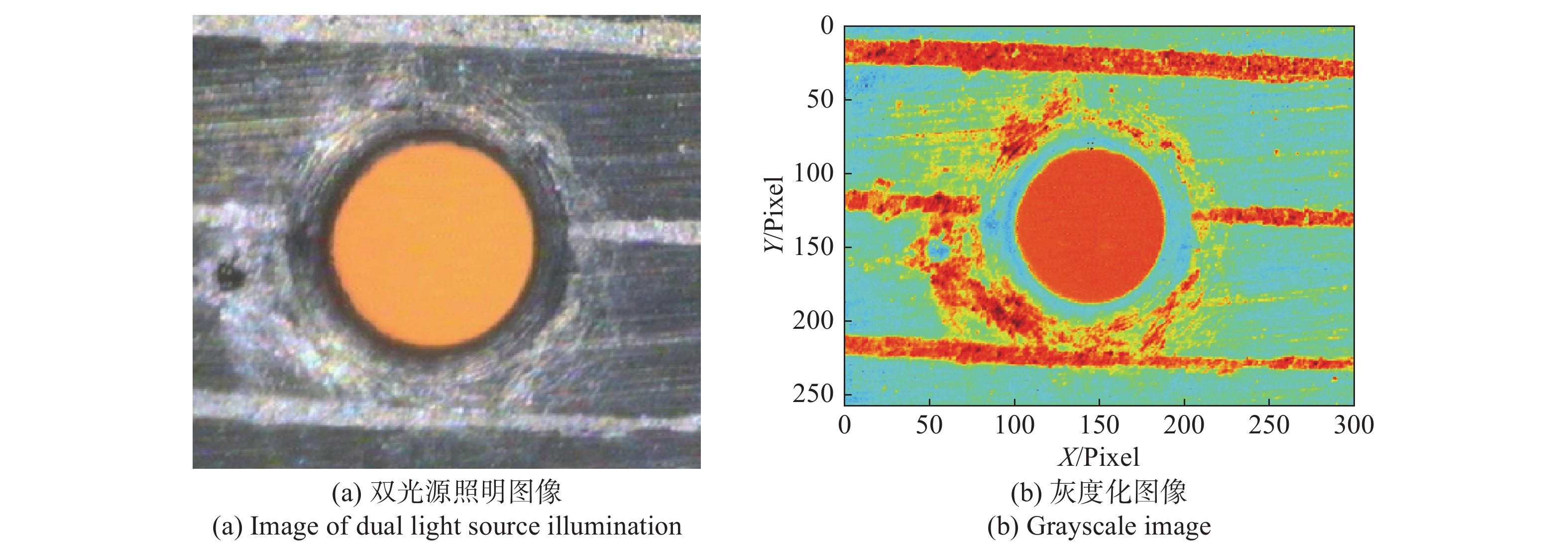
图 10 LED光源+积分球外部均匀光照明效果图
Figure 10. Results of integrating sphere background source + LED direct light source
-
[1] YE ZH, WANG L P, GU Y G, et al.. A laser triangulation-based 3d measurement system for inner surface of deep holes[C]. Proceedings of the ASME 2018 13th International Manufacturing Science and Engineering Conference, ASME, 2018. [2] 丁超, 唐力伟, 曹立军, 等. 深孔内表面结构光图像几何畸变校正[J]. 光学 精密工程,2018,26(10):2555-2564. doi: 10.3788/OPE.20182610.2555DING CH, TANG L W, CAO L J, et al. Geometric distortion correction for structured-light image of deep-hole inner-surface[J]. Optics and Precision Engineering, 2018, 26(10): 2555-2564. (in Chinese) doi: 10.3788/OPE.20182610.2555 [3] 刘玉洁, 朱韶平. 基于全局和局部多特征的图像增强算法[J]. 液晶与显示,2020,35(5):508-512. doi: 10.3788/YJYXS20203505.0508LIU Y J, ZHU SH P. Image enhancement algorithm based on global and local multi features[J]. Chinese Journal of Liquid Crystals and Displays, 2020, 35(5): 508-512. (in Chinese) doi: 10.3788/YJYXS20203505.0508 [4] 朱烨. 深孔类零件内表面三维综合测量技术的研究[D]. 合肥: 中国科学技术大学, 2018.ZHU Y. Research of 3D measurement technology for inner surface of deep holes[D]. Hefei: University of Science and Technology of China, 2018. (in Chinese). [5] MCGUIGAN M, CHRISTMAS J. Automating RTI: automatic light direction detection and correcting non-uniform lighting for more accurate surface normals[J]. Computer Vision and Image Understanding, 2020, 192: 102880. doi: 10.1016/j.cviu.2019.102880 [6] WAKAYAMA T, TAKAHASHI Y, ONO Y, et al. Three-dimensional measurement of an inner surface profile using a supercontinuum beam[J]. Applied Optics, 2018, 57(19): 5371-5379. doi: 10.1364/AO.57.005371 [7] YOKOTA M, KOYAMA T, TAKEDA K. Digital holographic inspection system for the inner surface of a straight pipe[J]. Optics and Lasers in Engineering, 2017, 97: 62-70. doi: 10.1016/j.optlaseng.2017.05.012 [8] 经周, 樊嘉杰, 陈威, 等. 光净化用紫外LED阵列模组的均匀照度优化设计[J]. 激光与光电子学进展,2019,56(19):192303.JING ZH, FAN J J, CHEN W, et al. Optimized uniform illumination design of ultraviolet LED array module used in light purification[J]. Laser &Optoelectronics Progress, 2019, 56(19): 192303. (in Chinese) [9] 胡莹, 苏宙平, 曹晶辉. 实现白光LED阵列色温分布均匀化技术研究[J]. 液晶与显示,2018,33(4):326-337. doi: 10.3788/YJYXS20183304.0326HU Y, SU ZH P, CAO J H. Design of white LED array for uniform correlated color temperature distribution[J]. Chinese Journal of Liquid Crystals and Displays, 2018, 33(4): 326-337. (in Chinese) doi: 10.3788/YJYXS20183304.0326 [10] MA Y P, LUO X B. Small-divergent-angle uniform illumination with enhanced luminance of transmissive phosphor-converted white laser diode by secondary optics design[J]. Optics and Lasers in Engineering, 2019, 122: 14-22. doi: 10.1016/j.optlaseng.2019.05.022 [11] 付瀚毅, 刘原原. 高均匀性小孔径激光照明系统[J]. 液晶与显示,2018,33(7):548-554. doi: 10.3788/YJYXS20183307.0548FU H Y, LIU Y Y. High uniformity laser illumination system with small aperture[J]. Chinese Journal of Liquid Crystals and Displays, 2018, 33(7): 548-554. (in Chinese) doi: 10.3788/YJYXS20183307.0548 [12] BABADI S, RAMIREZ-INIGUEZ R, BOUTALEB T, et al. Symmetric and asymmetric freeform lens to produce uniform illumination[J]. Optical Engineering, 2020, 59(1): 015102. [13] 周强, 王峥, 李敏. 基于菌群算法的飞机铆钉表面缺陷检测系统光源优化控制[J]. 液晶与显示,2017,32(11):895-904.ZHOU Q, WANG ZH, LI M. Bacterial foraging optimization control of light source for surface defect detection system based on colony algorithm[J]. Chinese Journal of Liquid Crystals and Displays, 2017, 32(11): 895-904. (in Chinese) [14] 李炳乾, 罗明浩, 俞理云, 等. COB封装全光谱LED光源及其光电特性[J]. 液晶与显示,2018,33(11):931-935. doi: 10.3788/YJYXS20183311.0931LI B Q, LUO M H, YU L Y, et al. Full spectrum LED light in COB package and its characteristics[J]. Chinese Journal of Liquid Crystals and Displays, 2018, 33(11): 931-935. (in Chinese) doi: 10.3788/YJYXS20183311.0931 [15] 姜涛, 张桂林, 高俊鹏. 制动主缸补偿孔位置检测误差分析与补偿[J]. 光学 精密工程,2020,28(5):1094-1100.JIANG T, ZHANG G L, GAO J P. Error analysis and compensation in position measurement of brake master cylinder compensation hole[J]. Optics and Precision Engineering, 2020, 28(5): 1094-1100. (in Chinese) [16] 高俊鹏, 姜涛, 张桂林, 等. 汽车制动主缸补偿孔形位尺寸检测双远心光学系统研究[J]. 计量学报,2017,38(3):262-266.GAO J P, JIANG T, ZHANG G L. Research on double telecentric optical system for the form and position detection of automobile brake cylinder compensation hole[J]. Acta Metrologica Sinica, 2017, 38(3): 262-266. (in Chinese) [17] 袁银麟, 郑小兵, 吴浩宇, 等. 大口径积分球参考光源的均匀性研究[J]. 光子学报,2015,44(4):0422003. doi: 10.3788/gzxb20154404.0422003YUAN Y L, ZHENG X B, WU H Y, et al. Uniformity research of integrating spheres reference light source with large exit aperture[J]. Acta Photonica Sinica, 2015, 44(4): 0422003. (in Chinese) doi: 10.3788/gzxb20154404.0422003 -

 下载:
下载:






计量
- 文章访问数: 2457
- HTML全文浏览量: 719
- PDF下载量: 95
- 被引次数: 0
