


Real-time polarization imaging integrated technology for solid-state low-light imaging
-
摘要: 高性能的微光夜视探测是光电探测未来的发展方向。本文针对在微弱光照射情况下,因为感光度不足而使得获得的偏振图像存在较大误差的问题,提出了一种固态微光实时偏振成像集成技术。通过引入白光通道和4个偏振方向的8个偏振通道,可在电子倍增CCD(EMCCD)微光器件上实现偏振和微光探测的集成。经试验验证,该技术获取的偏振信息准确度较高,且无偏振单元,使得器件的最低工作照度不被降低,器件同时具备微光-偏振探测功能,除可大幅提高探测器件对目标的探测识别能力外,还具有加工难度低、成本低等优点。Abstract: High-performance night vision light detection is the future direction of development in photoelectric detection. In this paper, a real-time polarization imaging technology for low-light imaging is proposed to solve issues where polarization images show large error due to low sensitivity. By introducing white light channels and 8 polarization channels in four polarization directions, the integration of polarization and detection can be achieved on EMCCD micro-optical devices. The experiment shows that the polarization information obtained by the polarization array is highly accurate, and also has advantages for its low difficulty in processing and its low cost.
-
Key words:
- EMCCD /
- polarization /
- low light /
- array
-
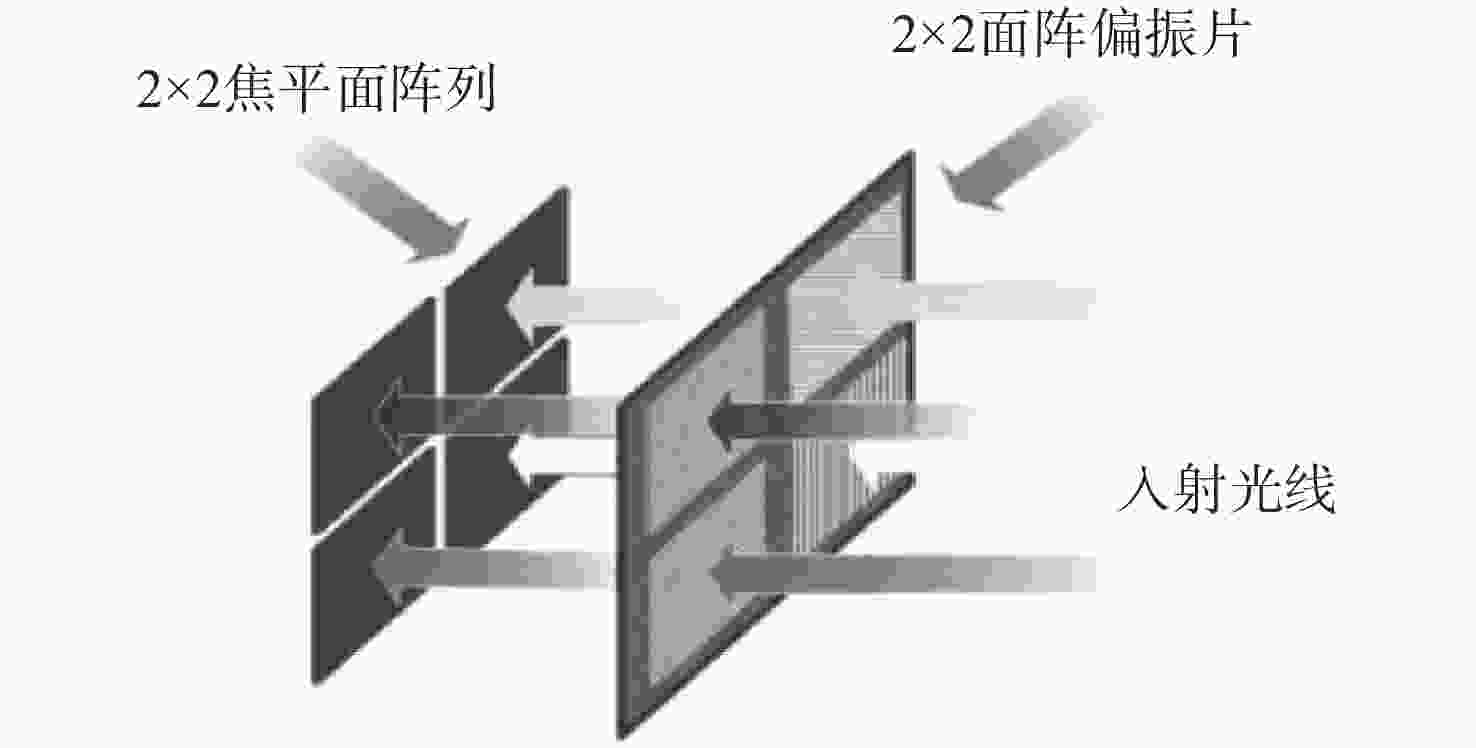
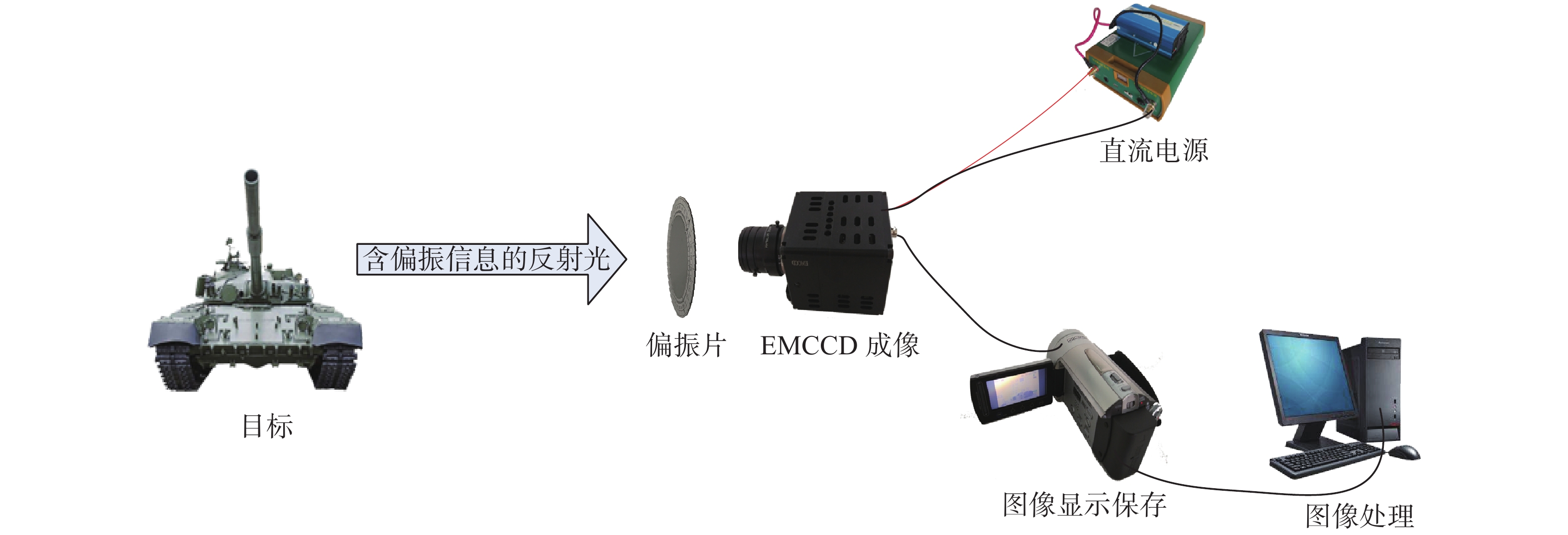
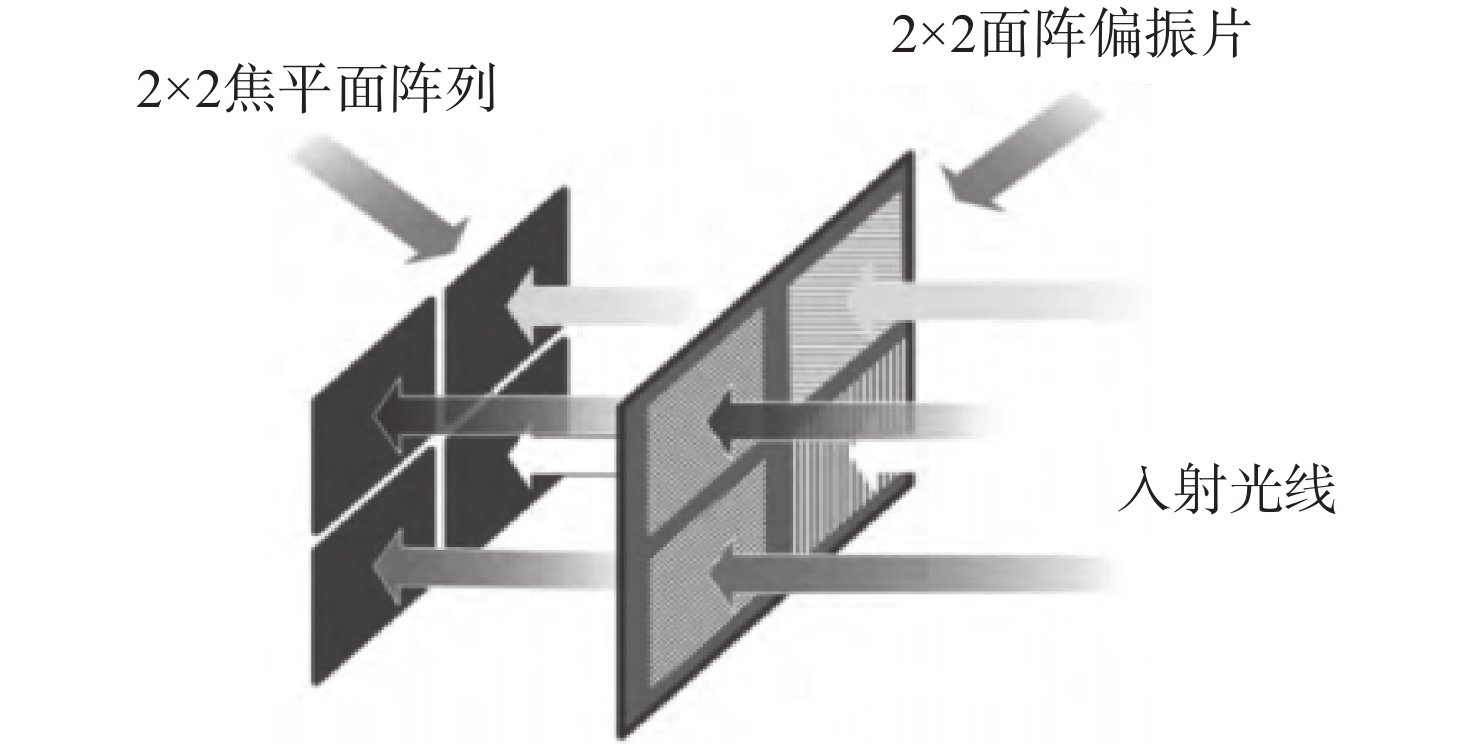
图 1 成像器件像元与偏振单元的集成示意图
Figure 1. Schematic diagram of integration between the imaging device pixel and polarization unit
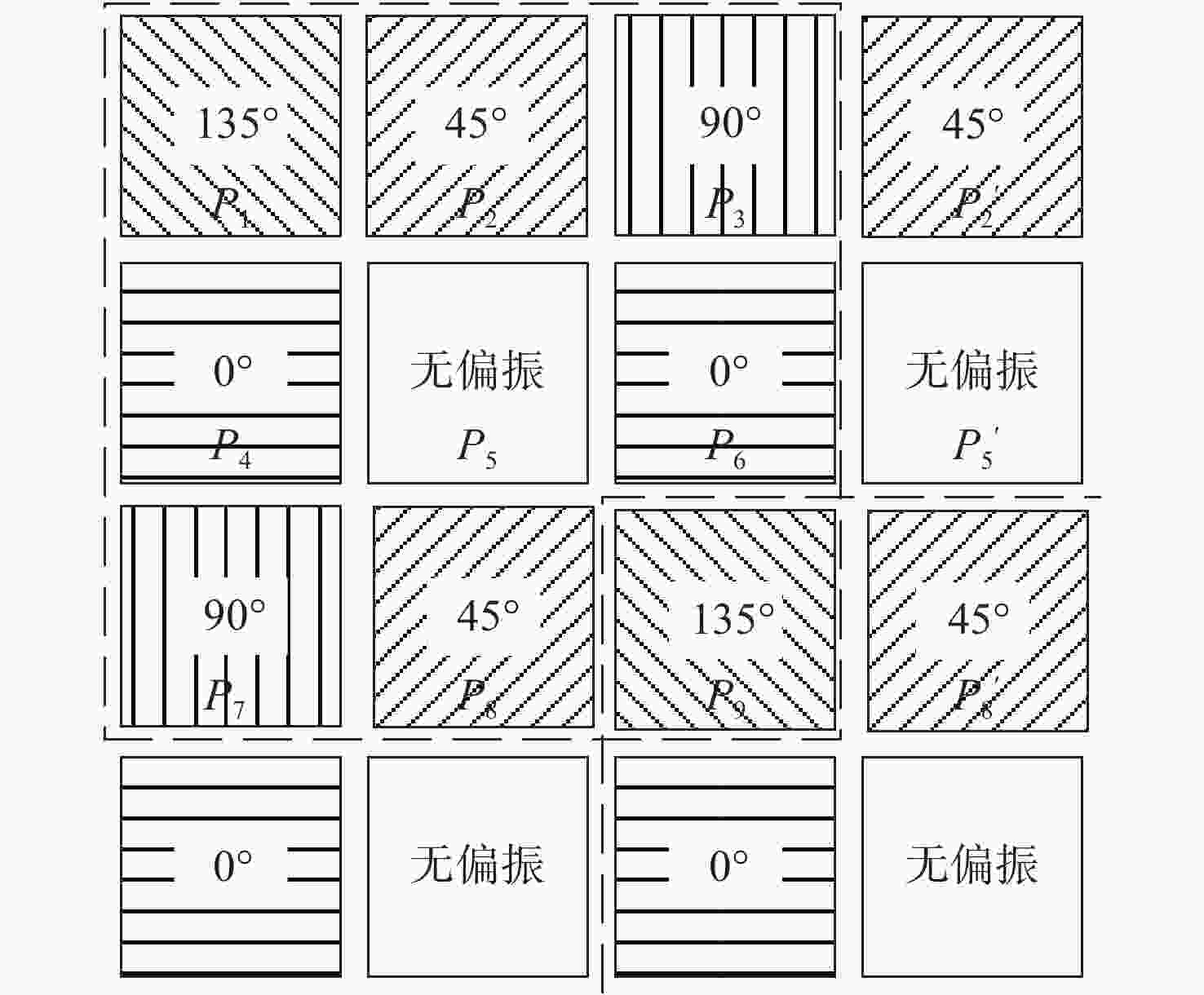
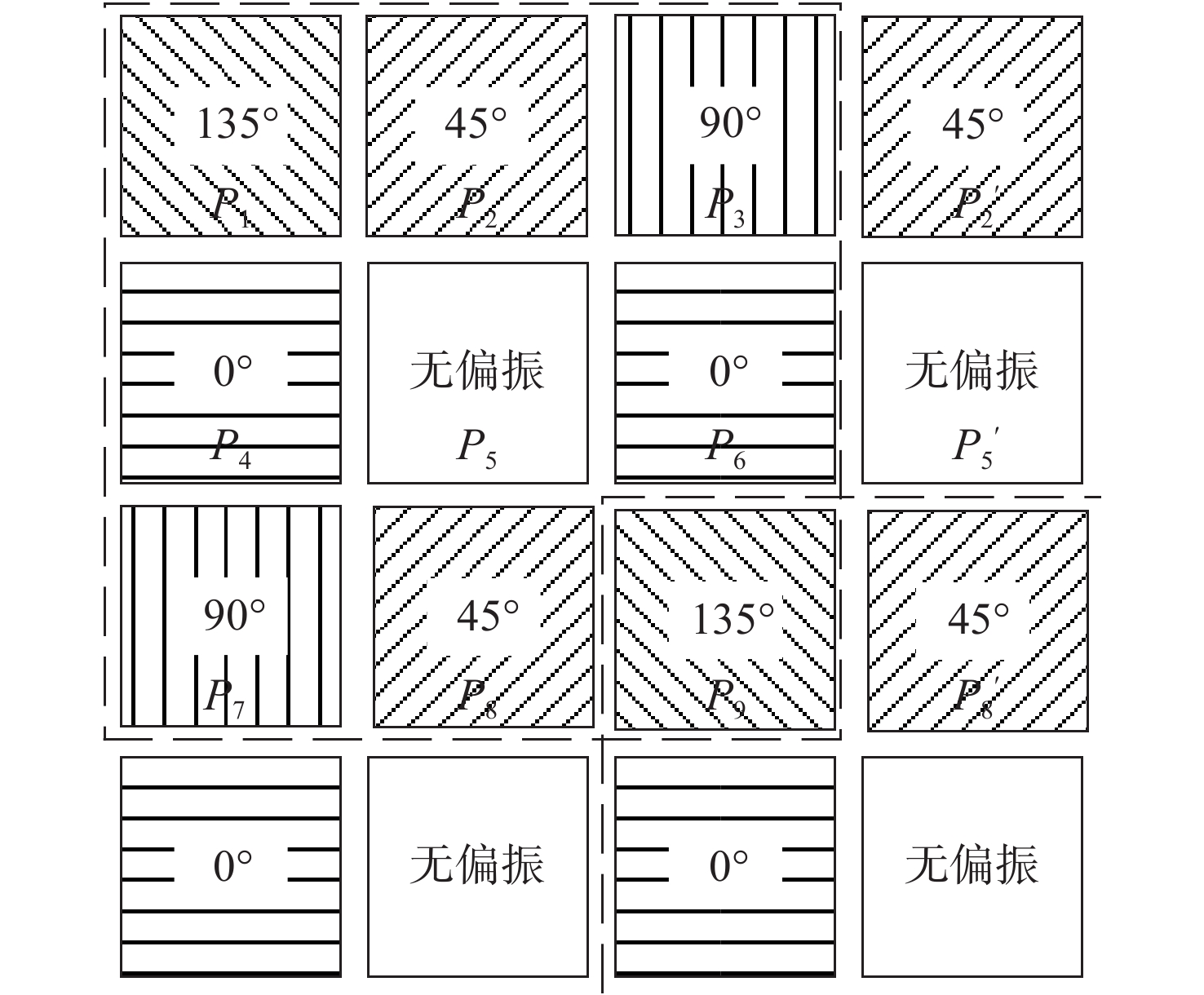
图 4 4个偏振方向加无偏振单元的阵列设计
Figure 4. Array design with four polarization directions and non-polarization elements
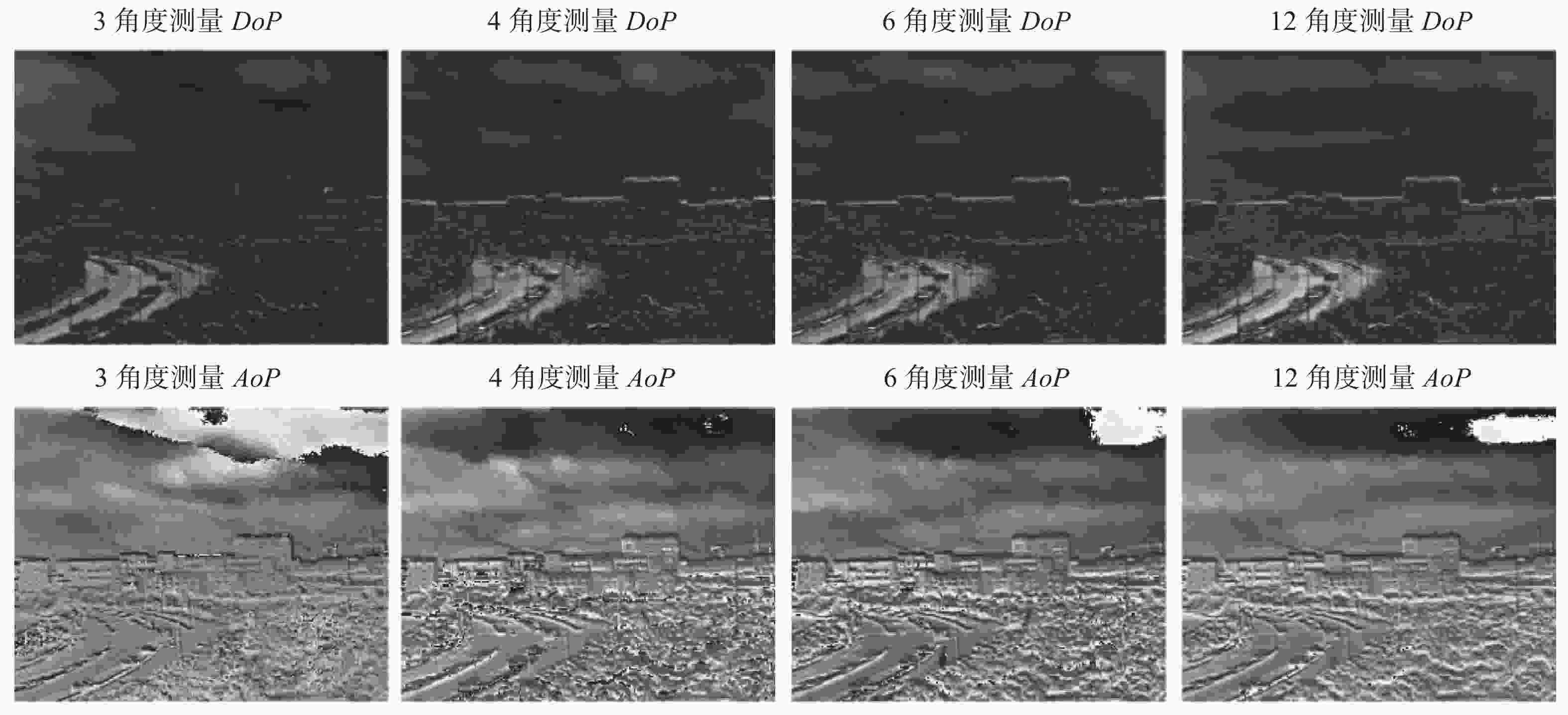
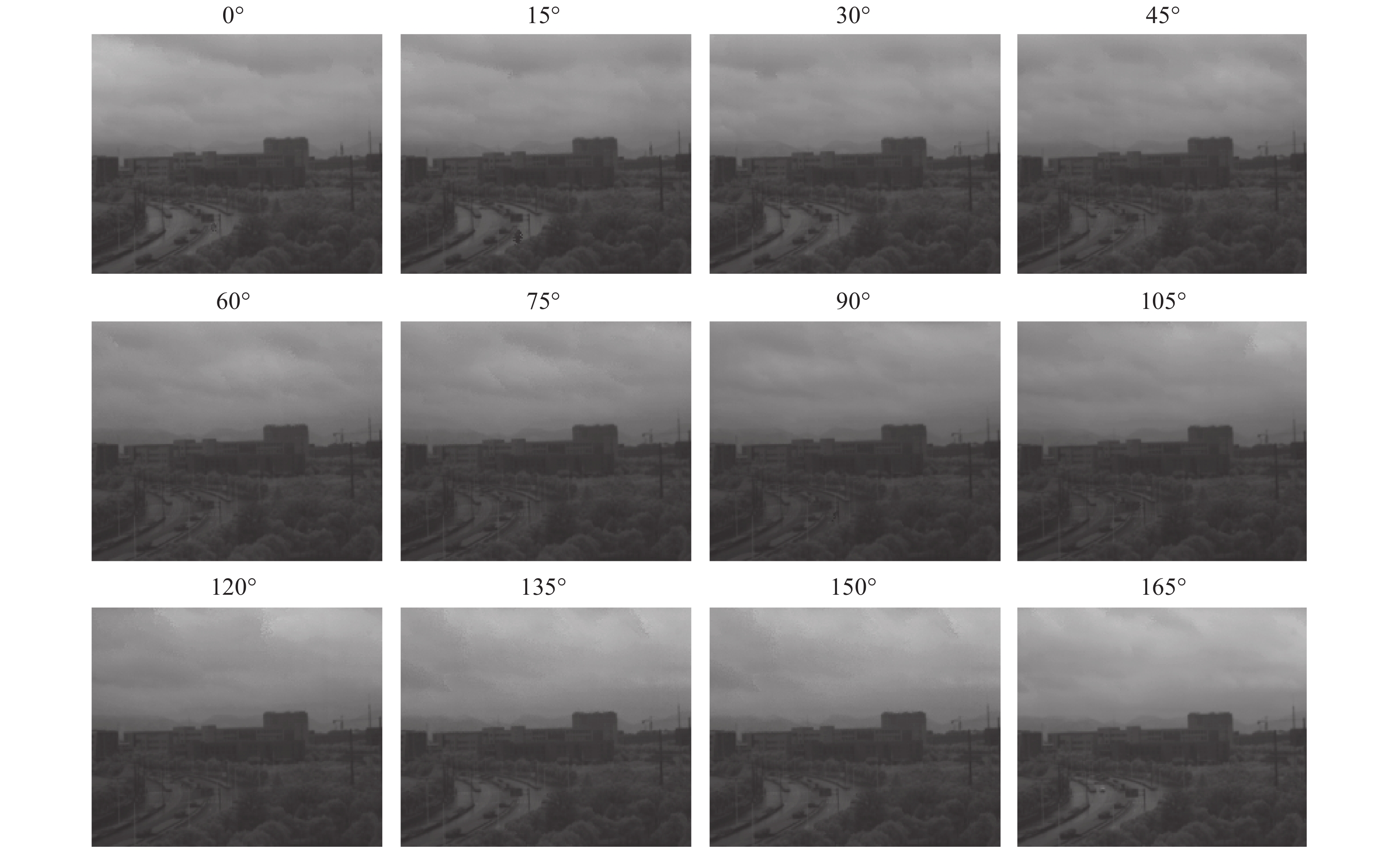
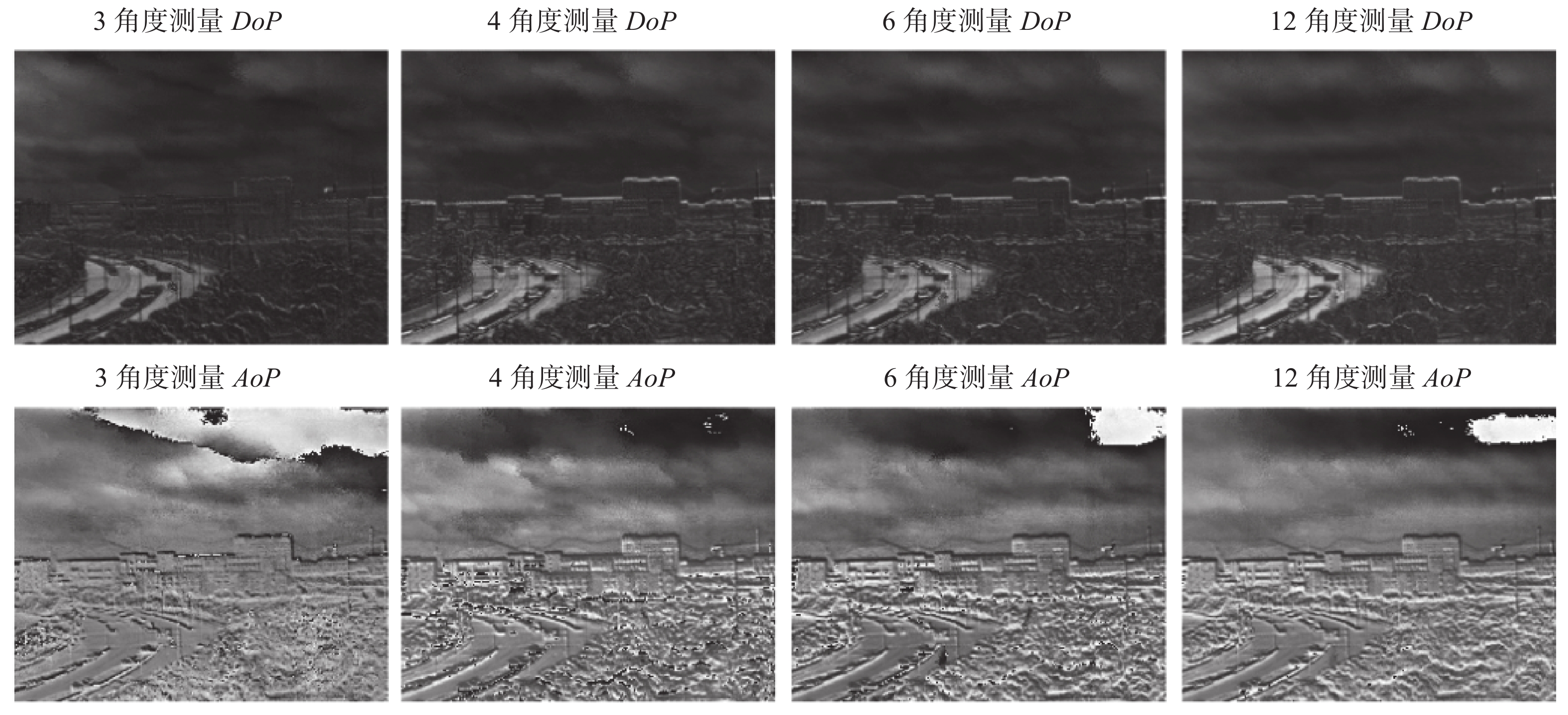
图 7 多偏振态图像偏振成像效果对比
Figure 7. Comparison of the polarization imaging effects of multi-polarization images
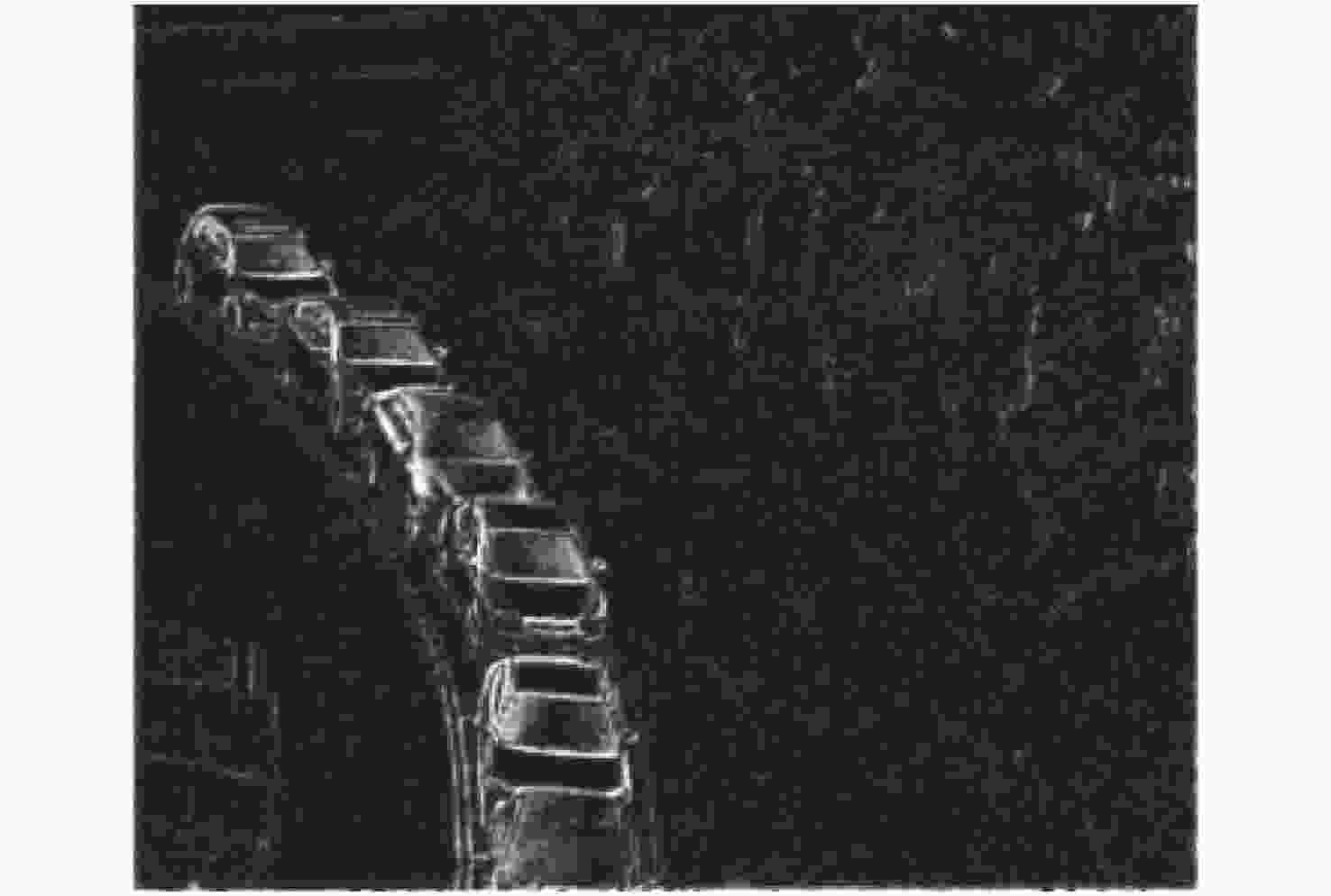
图 8 4个偏振方向的单元阵列设计偏振度图像
Figure 8. Polarization degree image of array with four polarization directions

图 9 4个偏振方向加无偏振单元的阵列设计偏振度图像
Figure 9. Polarization degree image of array with four polarization directions plus the non-polarized channel

图 10 (a)靶标偏振图与(b)靶标原图
Figure 10. (a) Polarization diagram and (b) original diagram of the target
表 1 多偏振态图像偏振对比
Table 1. Comparison of polarization for multi-polarization image
参数 最大值 均值 对比度 熵 DoP AoP DoP AoP DoP AoP DoP AoP 统计分析 3角度 0.557 0.272 0.477 0.010 3.41×10−5 0.011 3.372 2.203 4角度 0.469 0.314 0.387 0.013 3.05×10−5 0.014 3.556 2.325 6角度 0.360 0.402 0.273 0.005 2.63×10−5 0.013 3.579 2.473 12角度 0.134 0.785 0.027 0.302 2.03×10−5 0.042 3.558 6.769 均匀取值 3角度 0.305 0.785 0.092 0.190 2.22×10−4 0.099 4.816 5.007 4角度 0.330 0.785 0.131 0.137 1.97×10−4 0.114 5.207 3.799 6角度 0.269 0.785 0.057 0.235 1.22×10−4 0.095 4.538 6.253 12角度 0.134 0.785 0.027 0.302 2.04×10−5 0.042 3.558 6.769  下载: 导出CSV
下载: 导出CSV
表 2 偏振图与原图的对比度与清晰度比较
Table 2. Comparison of contrast and clarity between the polarization image and the original image
原图 偏振图 对比度 0.19711 0.36039 清晰度 0.0091316 0.019933
下载: 导出CSV
-
[1] 李岩, 张伟杰, 陈嘉玉. 偏振场景目标探测的建模与仿真[J]. 光学精密工程,2017,25(8):2233-2243. doi: 10.3788/OPE.20172508.2233LI Y, ZHANG W J, CHEN J Y. Modeling and simulation for target detection in polarization scene[J]. Optics and Precision Engineering, 2017, 25(8): 2233-2243. (in Chinese) doi: 10.3788/OPE.20172508.2233 [2] 廖延彪. 偏振光学[M]. 北京: 科学出版社, 2003.LIAO Y B. Polarization Optics[M]. Beijing: Science Press, 2003. (in Chinese) [3] 梁健, 巨海娟, 张文飞, 等. 偏振光学成像去雾技术综述[J]. 光学学报,2017,37(4):0400001. doi: 10.3788/AOS201737.0400001LIANG J, JU H J, ZHANG W F, et al. Review of optical polarimetric dehazing technique[J]. Acta Optica Sinica, 2017, 37(4): 0400001. (in Chinese) doi: 10.3788/AOS201737.0400001 [4] 杨力铭, 梁健, 张文飞, 等. 基于非偏振光照明的水下偏振成像目标增强技术[J]. 光学学报,2018,38(6):0611003. doi: 10.3788/AOS201838.0611003YANG L M, LIANG J, ZHANG W F, et al. Underwater polarimetric imaging target enhancement technology based on unpolarized illumination[J]. Acta Optica Sinica, 2018, 38(6): 0611003. (in Chinese) doi: 10.3788/AOS201838.0611003 [5] 李寒霜, 李博, 王淑荣. 空间紫外遥感光谱仪器偏振特性研究[J]. 光学学报,2018,38(1):185-189.LI H SH, LI B, WANG SH R. Polarization performance in space ultraviolet remote sensing spectral instruments[J]. Acta Optica Sinica, 2018, 38(1): 185-189. (in Chinese) [6] POWELL S B, GARNETT R, MARSHALL J, et al. Bioinspired polarization vision enables underwater geolocalization[J]. Science Advances, 2018, 4(4): eaao6841. doi: 10.1126/sciadv.aao6841 [7] 高文, 朱明, 郝志成. 彩色夜视技术的研究进展[J]. 液晶与显示,2016,31(12):1168-1179. doi: 10.3788/YJYXS20163112.1168GAO W, ZHU M, HAO ZH CH. Survey of color night vision technology[J]. Chinese Journal of Liquid Crystals and Displays, 2016, 31(12): 1168-1179. (in Chinese) doi: 10.3788/YJYXS20163112.1168 [8] 陈远金, 张猛蛟, 戴放, 等. EMCCD集成偏振-微光一体化成像技术研究[J]. 应用光学,2020,41(2):242-247.CHEN Y J, ZHANG M J, DAI F, et al. Research on polarization-low level integrated imaging technology based on EMCCD[J]. Journal of Applied Optics, 2020, 41(2): 242-247. (in Chinese) [9] 杨洁, 金伟其, 裘溯, 等. 考虑偏振片非理想性的可见光偏振成像修正模型[J]. 光学精密工程,2020,28(2):334-339.YANG J, JIN W Q, QIU S, et al. Correction model for visible light polarization imaging considering non-ideality of polarizers[J]. Optics and Precision Engineering, 2020, 28(2): 334-339. (in Chinese) [10] 沈薛晨, 刘钧, 高明. 基于小波-Contourlet变换的偏振图像融合算法[J]. 红外技术,2020,42(2):182-189.SHEN X CH, LIU J, GAO M. Polarizing image fusion algorithm based on wavelet-contourlet transform[J]. Infrared Technology, 2020, 42(2): 182-189. (in Chinese) [11] 彭文竹, 张禹, 王钦, 等. 基于正交偏振方向的多幅图像复原新方法[J]. 液晶与显示,2017,32(10):835-845. doi: 10.3788/YJYXS20173210.0835PENG W ZH, ZHANG Y, WANG Q, et al. New method of multiple image restoration based on orthogonal polarization direction[J]. Chinese Journal of Liquid Crystals and Displays, 2017, 32(10): 835-845. (in Chinese) doi: 10.3788/YJYXS20173210.0835 [12] 黎海育, 李抄, 李校博, 等. 基于偏振相机的全斯托克斯偏振仪优化研究[J]. 光学学报,2020,40(3):0326001. doi: 10.3788/AOS202040.0326001LI H Y, LI CH, LI X B, et al. Optimization of polarization-camera-based full stokes polarimeter[J]. Acta Optica Sinica, 2020, 40(3): 0326001. (in Chinese) doi: 10.3788/AOS202040.0326001 [13] 张志刚, 董凤良, 张青川, 等. 像素偏振片阵列制备及其在偏振图像增强中的应用[J]. 物理学报,2014,63(18):184204. doi: 10.7498/aps.63.184204ZHANG ZH G, DONG F L, ZHANG Q CH, et al. Fabrication of pixelated polarizer array and its application in polarization enhancement[J]. Acta Physica Sinica, 2014, 63(18): 184204. (in Chinese) doi: 10.7498/aps.63.184204 [14] 陈东静, 崔宏青, 冯亚云, 等. 一种新的测量扭曲向列相液晶盒盒厚和扭曲角的Stokes矢量法[J]. 液晶与显示,2007,22(6):662-667. doi: 10.3969/j.issn.1007-2780.2007.06.004CHEN D J, CUI H Q, FENG Y Y, et al. Novel stokes parameter method for determination of cell thickness and twist angle of twisted nematic liquid crystal cells[J]. Chinese Journal of Liquid Crystals and Displays, 2007, 22(6): 662-667. (in Chinese) doi: 10.3969/j.issn.1007-2780.2007.06.004 [15] 蒋云峰, 武东生, 黄富瑜. 彩色夜视技术方法综述[J]. 激光技术,2020,44(1):108-112.JIANG Y F, WU D SH, HUANG F Y. Summary of color night vision technology[J]. Laser Technology, 2020, 44(1): 108-112. (in Chinese) [16] 李莉. EMCCD实时图像处理系统设计及FPGA实现研究[J]. 电子设计工程,2019,27(13):161-164, 170. doi: 10.3969/j.issn.1674-6236.2019.13.035LI L. EMCCD real-time image processing system design and FPGA implementation research[J]. Electronic Design Engineering, 2019, 27(13): 161-164, 170. (in Chinese) doi: 10.3969/j.issn.1674-6236.2019.13.035 [17] 张晓阳, 刘金国, 孔德柱, 等. CMOS和EMCCD在全局快门模式下的信噪比探讨[J]. 电光与控制,2019,26(7):80-84. doi: 10.3969/j.issn.1671-637X.2019.07.016ZHANG X Y, LIU J G, KONG D ZH, et al. Signal to noise ratio of CMOS and EMCCD in global shutter mode[J]. Electronics Optics &Control, 2019, 26(7): 80-84. (in Chinese) doi: 10.3969/j.issn.1671-637X.2019.07.016 [18] 康果果, 谭峤峰, 陈伟力, 等. 亚波长金属线栅的设计、制备及偏振成像实验研究[J]. 物理学报,2011,60(1):014218. doi: 10.7498/aps.60.014218KANG G G, TAN Q F, CHEN W L, et al. Design and fabrication of sub-wavelength metal wire-grid and its application to experimental study of polarimetric imaging[J]. Acta Physica Sinica, 2011, 60(1): 014218. (in Chinese) doi: 10.7498/aps.60.014218 [19] 彭勇, 冯斌, 史泽林, 等. 微偏振片阵列成像的非均匀校正研究[J]. 红外与激光工程,2017,46(4):0404004. doi: 10.3788/IRLA201746.0404004PENG Y, FENG B, SHI Z L, et al. Non-uniformity correction in polarization imaging obtained with integrated microgrid polarimeters[J]. Infrared and Laser Engineering, 2017, 46(4): 0404004. (in Chinese) doi: 10.3788/IRLA201746.0404004 [20] 罗海波, 刘燕德, 兰乐佳, 等. 分焦平面偏振成像关键技术[J]. 华东交通大学学报,2017,34(1):8-13.LUO H B, LIU Y D, LAN L J, et al. Key technologies of polarization imaging for division of focal plane polarimeters[J]. Journal of East China Jiaotong University, 2017, 34(1): 8-13. (in Chinese) [21] 于淼. 分焦平面像素偏振片阵列的制备研究[J]. 黑龙江科学,2017,8(20):38-39. doi: 10.3969/j.issn.1674-8646.2017.20.015YU M. Study on fabrication of polarization plane polarizing plate array[J]. Heilongjiang Science, 2017, 8(20): 38-39. (in Chinese) doi: 10.3969/j.issn.1674-8646.2017.20.015 -

 下载:
下载:






计量
- 文章访问数: 3203
- HTML全文浏览量: 761
- PDF下载量: 221
- 被引次数: 0
