


-
摘要: 本文研究了卷帘快门式CMOS成像器件在拍摄星图时引入的快门效应。根据卷帘快门CMOS图像传感器的成像原理和特点, 分析了星图中由于快门效应导致的星点变化情况,对该成像方式引入的图像变形,提出了一种像移补偿方法。该方法在已知星图拍摄帧频、CMOS图形传感器相邻行曝光时间间隔的基础上,通过对相邻星图中的星点进行目标提取、质心计算以及星点质心匹配等操作,完成景物在像面上像移速度的计算,最后结合该速度值和CMOS图像传感器的行曝光时间间隔,计算星点质心在单帧星图中的像移,逆向补偿。通过实际拍摄的星图对算法的效果进行测试,实验结果表明,利用补偿后的星图解算姿态数据时,其中非机动模式下与两个星敏的夹角误差可达到0.5″以内,机动模式下与两个星敏的夹角误差也可达到0.6″左右,不仅明显优于补偿前,且精度高于很多目前主流的星敏感器。该实验结果不仅证明了算法的有效性,而且在一定程度上推广了卷帘快门式CMOS 相机在航空航天领域的应用。Abstract: According to the imaging principles and characteristics of a shutter CMOS image sensor, the shutter effect introduced by a shutter CMOS image detector operating on a star map is analyzed, and an image shift compensation method is proposed to rectify the image distortion introduced by this kind of imaging method. With the known frame frequency of the star images and the exposure time interval of the adjacent rows of the CMOS graphic sensor, this method can achieve high-speed calculation of star motion by extracting and matching the centroid of the star points in an adjacent star map. The centroid of the star points in a global image is calculated by combining the speed value with the row exposure time interval of the CMOS image sensor. The effect of the algorithm is tested on actual star images. The experimental results show that with the compensated star map, angle errors between the star sensors are smaller than 0.5″ when a satellite is in non-maneuver mode, and angle errors between either of the star sensors are about 0.6″ when the satellite is in maneuver mode. The experimental results not only prove the effectiveness of the algorithm, but also broaden the applications of shutter CMOS detectors to some extent, especially in aerospace engineering.
-
Key words:
- CMOS image sensor /
- rolling shutter /
- star map /
- star extraction /
- star point matching
-
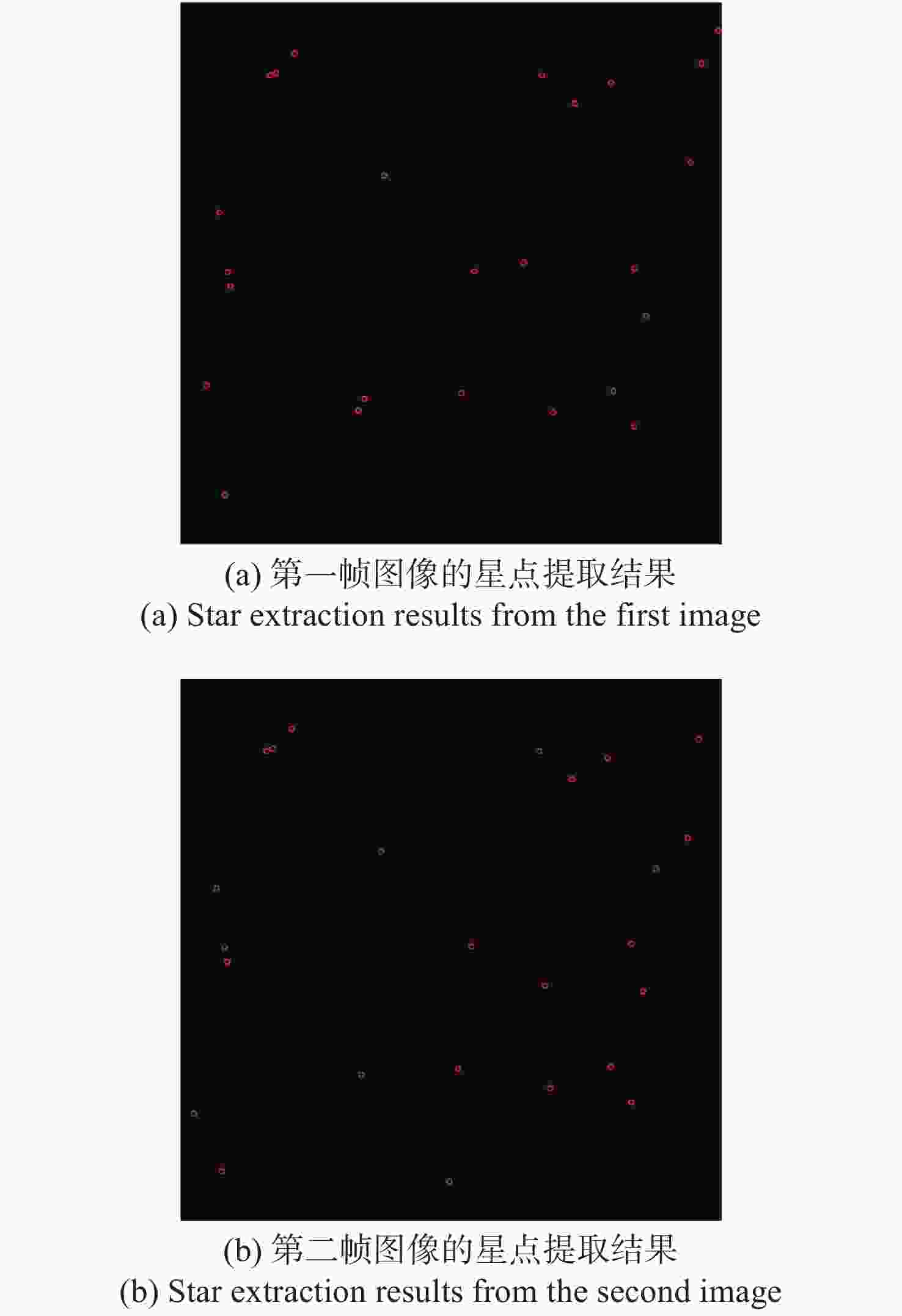
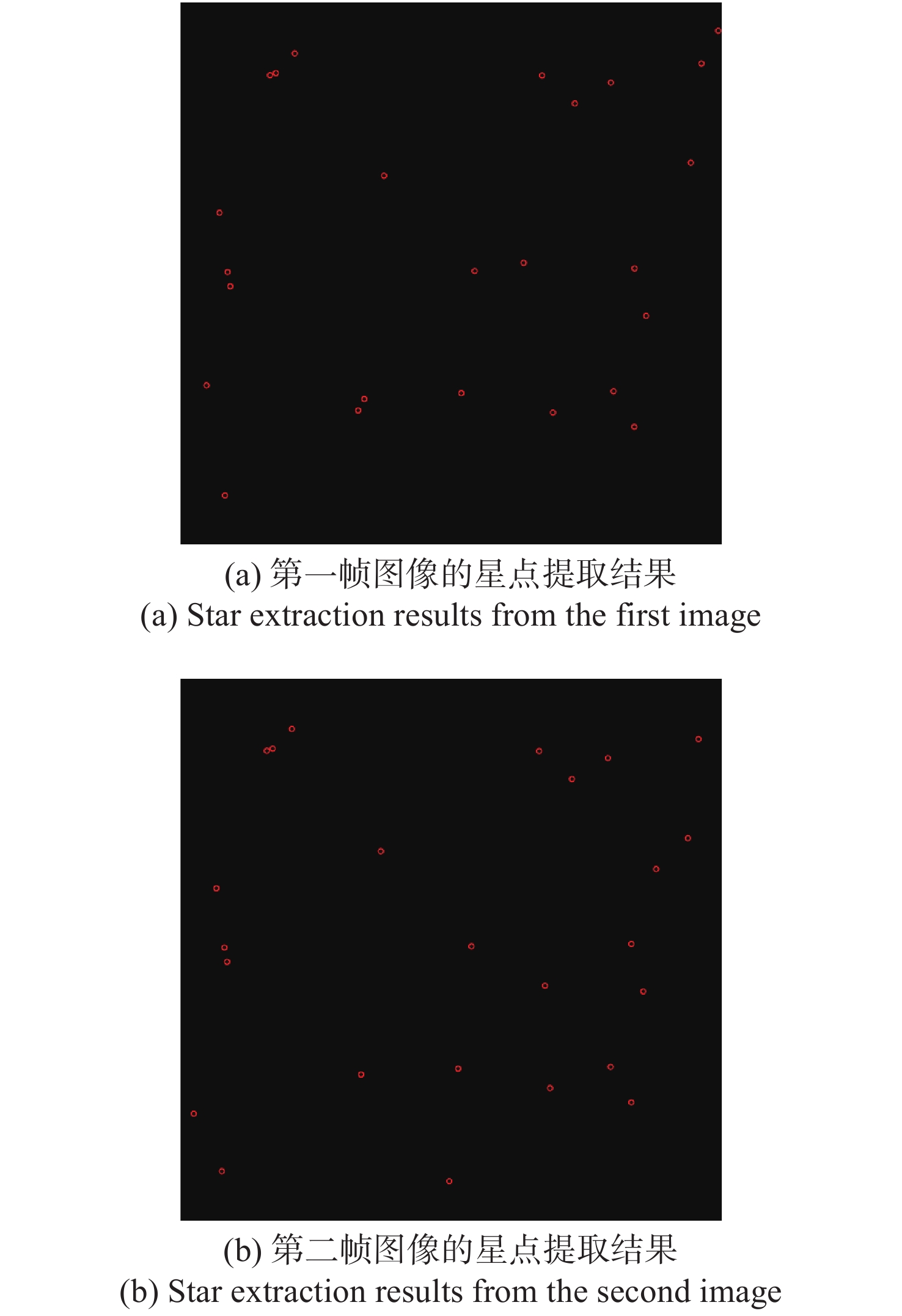
图 6 相邻两帧图像的星点提取结果对比
Figure 6. Comparison of star extraction results between two adjacent star images
表 1 非机动模式下星相机光轴与a星敏之间的夹角误差
Table 1. Angle error between the star-camera and star sensor a in non-maneuver mode
序号 俯仰角/° 侧摆角/° 补偿前误差1σ/″ 补偿后误差1σ/″ 1 0.549 −6.516 4.353 0.540 2 0.051 −36.699 5.424 0.439 3 0.152 −16.769 7.147 0.768 4 0.334 12.903 6.284 0.702 5 0 −5.542 4.177 0.377 6 0 8.672 4.491 0.384 7 0 12.284 5.261 0.546 8 −0.231 10.533 5.535 0.231 9 −0.370 −24.558 4.225 0.300 10 3.023 −25.764 5.360 0.481 平均值 5.249 0.476  下载: 导出CSV
下载: 导出CSV
表 2 非机动模式下星相机光轴与b星敏之间的夹角误差
Table 2. Angle error between the star-camera and star sensor b in non-maneuver mode
序号 俯仰角/° 侧摆角/° 补偿前误差1σ/″ 补偿后误差1σ/″ 1 0.549 −6.516 5.607 0.420 2 0.051 −36.699 5.186 0.317 3 0.152 −16.769 4.375 0.211 4 0.334 12.903 3.876 0.361 5 0 −5.542 3.968 0.249 6 0 8.672 3.233 0.297 7 0 12.284 5.261 0.567 8 −0.231 10.533 2.984 0.185 9 −0.370 −24.558 3.889 0.266 10 3.023 −25.764 3.960 0.202 平均值 4.234 0.308
下载: 导出CSV
表 3 机动模式下星相机光轴与a星敏之间的夹角误差
Table 3. Angle error between the star-camera and the star sensor a in maneuver mode
序号 俯仰角/(°) 侧摆角/(°) 补偿前误差1σ/″ 补偿后误差1σ/″ 1 0 −18.191 7.754 0.818 2 0 −31.961 6.686 0.532 3 0 2.597 5.914 0.318 4 0 5.154 7.387 0.714 5 0 3.855 7.996 0.734 平均值 7.147 0.623
下载: 导出CSV
表 4 机动模式下星相机光轴与b星敏之间夹角误差
Table 4. Angle error between the star-camera and star sensor b in maneuver mode
序号 俯仰角/° 侧摆角/° 补偿前误差1σ/″ 补偿后误差1σ/″ 1 0 −18.191 8.134 0.543 2 0 −31.961 6.563 0.392 3 0 2.597 4.782 0.241 4 0 5.154 5.973 0.616 5 0 3.855 6.189 0.932 平均值 6.328 0.545
下载: 导出CSV
-
[1] SUN ZH Y, ZHANG D, FANG W. An ASIC chip with pipeline ADCs for CCD sensor imaging system[J]. Sensors and Actuators A:Physical, 2018, 279: 284-292. doi: 10.1016/j.sna.2018.06.014 [2] 孙振亚, 刘栋斌, 方伟, 等. 高密度模块化TDI CCD成像系统设计[J]. 红外与激光工程,2018,47(6):0618001. doi: 10.3788/IRLA201847.0618001SUN ZH Y, LIU D B, FANG W, et al. Design of high density modularity TDI CCD imaging system[J]. Infrared and Laser Engineering, 2018, 47(6): 0618001. (in Chinese) doi: 10.3788/IRLA201847.0618001 [3] 宁永慧, 郭汉洲, 余达, 等. 基于LM98640的TDI-CCD暗场扣除方法[J]. 液晶与显示,2019,34(6):592-597. doi: 10.3788/YJYXS20193406.0592NING Y H, GUO H ZH, YU D, et al. Dark field deduction method of TDI--CCD based on LM98640[J]. Chinese Journal of Liquid Crystals and Displays, 2019, 34(6): 592-597. (in Chinese) doi: 10.3788/YJYXS20193406.0592 [4] 杨成财, 鞠国豪, 陈永平. 集成PIN光敏元的CMOS探测器光电响应特性研究[J]. 中国光学,2019,12(5):1076-1089. doi: 10.3788/co.20191205.1076YANG CH C, JU G H, CHEN Y P. Study on the photo response of a CMOS sensor integrated with PIN photodiodes[J]. Chinese Optics, 2019, 12(5): 1076-1089. (in Chinese) doi: 10.3788/co.20191205.1076 [5] 张军亮, 戚涛, 李晖, 等. 基于GL0816传感器的高速线阵CMOS相机系统设计[J]. 液晶与显示,2019,34(1):24-32. doi: 10.3788/YJYXS20193401.0024ZHANG J L, QI T, LI H, et al. Design of high speed linear CMOS camera system based on GL0816 sensor[J]. Chinese Journal of Liquid Crystals and Displays, 2019, 34(1): 24-32. (in Chinese) doi: 10.3788/YJYXS20193401.0024 [6] PARK J, LEE Y, KIM B, et al. Pixel technology for improving IR quantum efficiency of backside-illuminated CMOS image sensor[J]. International Image Sensor Society,2019,4(R14):1-4. [7] XU CH, MO Y W, REN G J, et al. . A stacked global-shutter CMOS imager with SC-Type hybrid-GS pixel and self-knee point calibration single frame HDR and on-chip binarization algorithm for smart vision applications[C]. Proceedings of 2019 IEEE International Solid- State Circuits Conference, IEEE, 2019: 94-96. [8] KOBAYASHI M, SEKINE H, MIKI T, et al. A 3.4μm pixel pitch global shutter CMOS image sensor with dual in-pixel charge domain memory[J]. Japanese Journal of Applied Physics, 2019, 58(SB): SBBL02. doi: 10.7567/1347-4065/ab00f3 [9] XU J T, SHI X L, NIE K M, et al. A global shutter high speed TDI CMOS image sensor with pipelined charge transfer pixel[J]. IEEE Sensors Journal, 2018, 18(7): 2729-2736. doi: 10.1109/JSEN.2018.2800743 [10] 刘智, 柴华, 李娜娜. CMOS图像传感器中卷帘式快门特性及其应用[J]. 光学 精密工程,2009,17(8):2017-2023.LIU ZH, CHAI H, LI N N. Shutter mode of CMOS image sensor and its application[J]. Optics and Precision Engineering, 2009, 17(8): 2017-2023. (in Chinese) [11] 张惠宇宸, 贺小军, 苏志强. 卷帘数字域TDI技术的CMOS成像系统的SNR模型建立[J]. 长春理工大学学报(自然科学版),2018,41(4):68-72.ZHANG H Y CH, HE X J, SU ZH Q. SNR model building of CMOS imaging system of rolling digital domain TDI technology[J]. Journal of Changchun University of Science and Technology (Natural Science Edition) , 2018, 41(4): 68-72. (in Chinese) [12] HERNANDEZ-PALACIOS J, RANDEBERG L L. Intercomparison of EMCCD- and sCMOS-based imaging spectrometers for biomedical applications in low-light conditions[J]. Proceedings of SPIE, 2012, 8215: 82150Q. doi: 10.1117/12.909680 [13] 贾永丹, 王伟之, 孙建, 等. 高精度星相机光学系统像质评价及实现[J]. 空间控制技术与应用,2018,44(3):43-49.JIA Y D, WANG W ZH, SUN J. Evaluation and implementation of image quality in high-precision star camera optical system[J]. Aerospace Control and Application, 2018, 44(3): 43-49. (in Chinese) [14] VAN BEZOOIJEN R W H. SIRTF autonomous star tracker[J]. Proceedings of SPIE, 2003, 4850: 108-121. doi: 10.1117/12.461606 [15] ZHANG P, ZHAO Q L, LIU J N, et al. A brightness-referenced star identification algorithm for APS star tracker[J]. Sensors, 2014, 14(10): 18498-18514. doi: 10.3390/s141018498 [16] LI J, WEI X G, ZHANG G J. Iterative algorithm for autonomous star identification[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(1): 536-547. doi: 10.1109/TAES.2014.130729 [17] ZHU X F, WU F, XU Q G. A fast star image extraction algorithm for autonomous star sensors[J]. Proceedings of SPIE, 2012, 8558: 855821. doi: 10.1117/12.999641 [18] 赵战民, 朱占龙, 王军芬. 改进的基于灰度级的模糊C均值图像分割算法[J]. 液晶与显示,2020,35(5):499-507. doi: 10.3788/YJYXS20203505.0499ZHAO ZH M, ZHU ZH L, WANG J F. Improved fuzzy C-means algorithm based on gray-level for image segmentation[J]. Chinese Journal of Liquid Crystals and Displays, 2020, 35(5): 499-507. (in Chinese) doi: 10.3788/YJYXS20203505.0499 [19] 黄冠婷, 韩学辉, 龚晓婷, 等. 基于图像分割和区域匹配的灰度图像彩色化算法[J]. 液晶与显示,2019,34(6):619-626. doi: 10.3788/YJYXS20193406.0619HUANG G T, HAN X H, GONG X T, et al. Gray image colorization algorithm based on image segmentation and region matching[J]. Chinese Journal of Liquid Crystals and Displays, 2019, 34(6): 619-626. (in Chinese) doi: 10.3788/YJYXS20193406.0619 [20] BOLELLI F, CANCILLA M, BARALDI L, et al. Toward reliable experiments on the performance of connected components labeling algorithms[J]. Journal of Real-Time Image Processing, 2020, 17(2): 229-244. doi: 10.1007/s11554-018-0756-1 [21] 王海涌, 费峥红, 王新龙. 基于高斯分布的星像点精确模拟及质心计算[J]. 光学 精密工程,2009,17(7):1672-1677.WANG H Y, FEI ZH H, WANG X L. Precise simulation of star spots and centroid calculation based on Gaussian distribution[J]. Optics and Precision Engineering, 2009, 17(7): 1672-1677. (in Chinese) [22] WANG H Y, XU E SH, LI ZH F, et al. Gaussian analytic centroiding method of star image of star tracker[J]. Advances in Space Research, 2015, 56(10): 2196-2205. doi: 10.1016/j.asr.2015.08.027 [23] 王苹. 高精度视频配准算法中的静态图像配准算法[J]. 液晶与显示,2020,35(6):612-618.WANG P. Static image registration algorithm in high-precision video registration algorithm[J]. Chinese Journal of Liquid Crystals and Displays, 2020, 35(6): 612-618. (in Chinese) -

 下载:
下载:



计量
- 文章访问数: 2106
- HTML全文浏览量: 643
- PDF下载量: 106
- 被引次数: 0
