


A new co-phasing detection technology of a segmented mirror based on broadband light
-
摘要:
鉴于单块口径的光学望远镜不能无限增大,采用拼接镜技术才能造出10 m以上口径的光学望远镜,因此,拼接镜的共相检测技术成为了拼接过程和维持镜面质量的关键技术。针对目前最被接受的宽窄带夏克哈特曼法,本文提出使用宽波段(400~700 nm)光源的非相干性和相干性相结合方式实现250 nm粗共相,以及10 nm精共相,以此解决由于目标流量过低而引起测量时间过长的问题。即在粗共相时,以两个半圆孔的非相干衍射图样为模板,白光为光源,采用互相关算法计算互相关系数的值,通过设置合理的互相关系数阈值,以实现无限制的检测范围和0.25 μm 的检测精度;精共相时,以白光为光源、采用以一幅相干衍射图案(理想白光艾里斑)为模板的方式替代多幅不同平移误差下的相干衍射图案为模板方式,实现0.27 μm量程、0.01 μm以上精度的共相检测。对该共相方法进行了理论和仿真分析,结果表明:该新型共相检测方法的检测量程为无限量程,检测精度能达到 10 nm以上,该方法适用于拼接镜粗精共相的检测。
Abstract:Considering that the aperture of a monoblock telescope is limited in size, to build an aperture telescope that is greater than ten meters, the technology of segmented mirrors should be used. Therefore, the co-phasing detection technology of segmented mirrors has become the key technology in the segmented process and in maintaining the mirror quality. To solve the problem that the broadband method demands a long time consuming and the narrowband method has a small range in the most widely accepted broadband and narrowband shack Hartmann method, a new method is proposed combining the incoherent and coherent diffraction patterns of broadband light (400−700 nm) to realize coarse co-phasing of 250 nm precision and fine co-phasing of 10 nm precision. When a segmented mirror is coarse co-phasing, the incoherent diffraction pattern of two hale circular holes is used as a template and white light is used as the light source. The cross-correlation algorithm is used to calculate the value of cross-correlation coefficient, and then it can achieve the unlimited range and a detection precision of 0.25 μm by setting a reasonable threshold value for the cross-correlation coefficient. When segmented mirror is fine co-phasing, a disk pattern of white light instead of multiple coherent diffraction patterns with different piston errors is used as a template to achieve a range of 0.27 μm and a detection precision of 0.01 μm. The theoretical and simulation results show that the detection range is the range of actuator and the measurement accuracy is less than 10 nm. Both the theoretical analysis and simulation show that this method is suitable for the detection of a coarse and fine co-phasing of segmented mirror.
-
Key words:
- astronomical optics /
- telescopes /
- sub-aperture /
- phase measurement
-
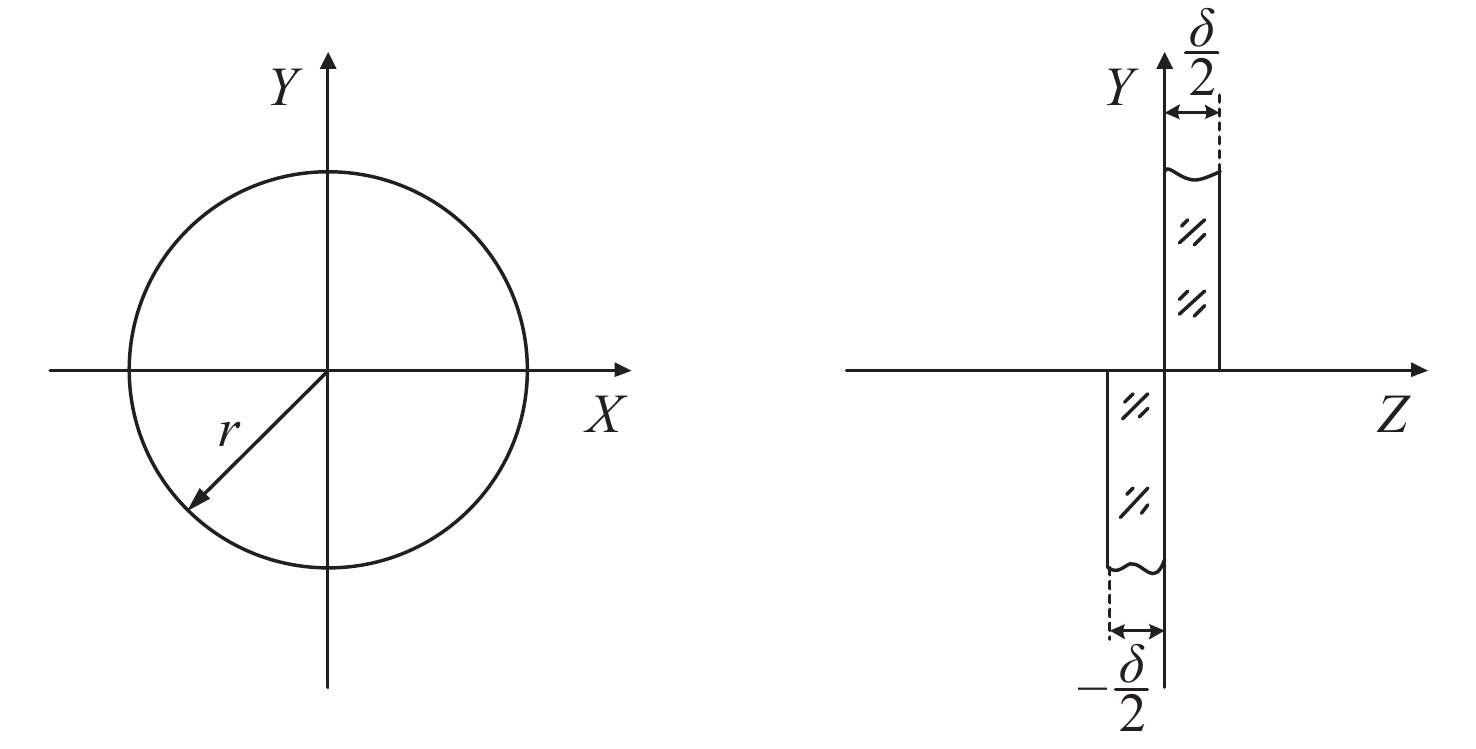
图 1 放置在子镜间的圆孔示意图
Figure 1. Schematic diagram of circular hole placed between sub-mirrors
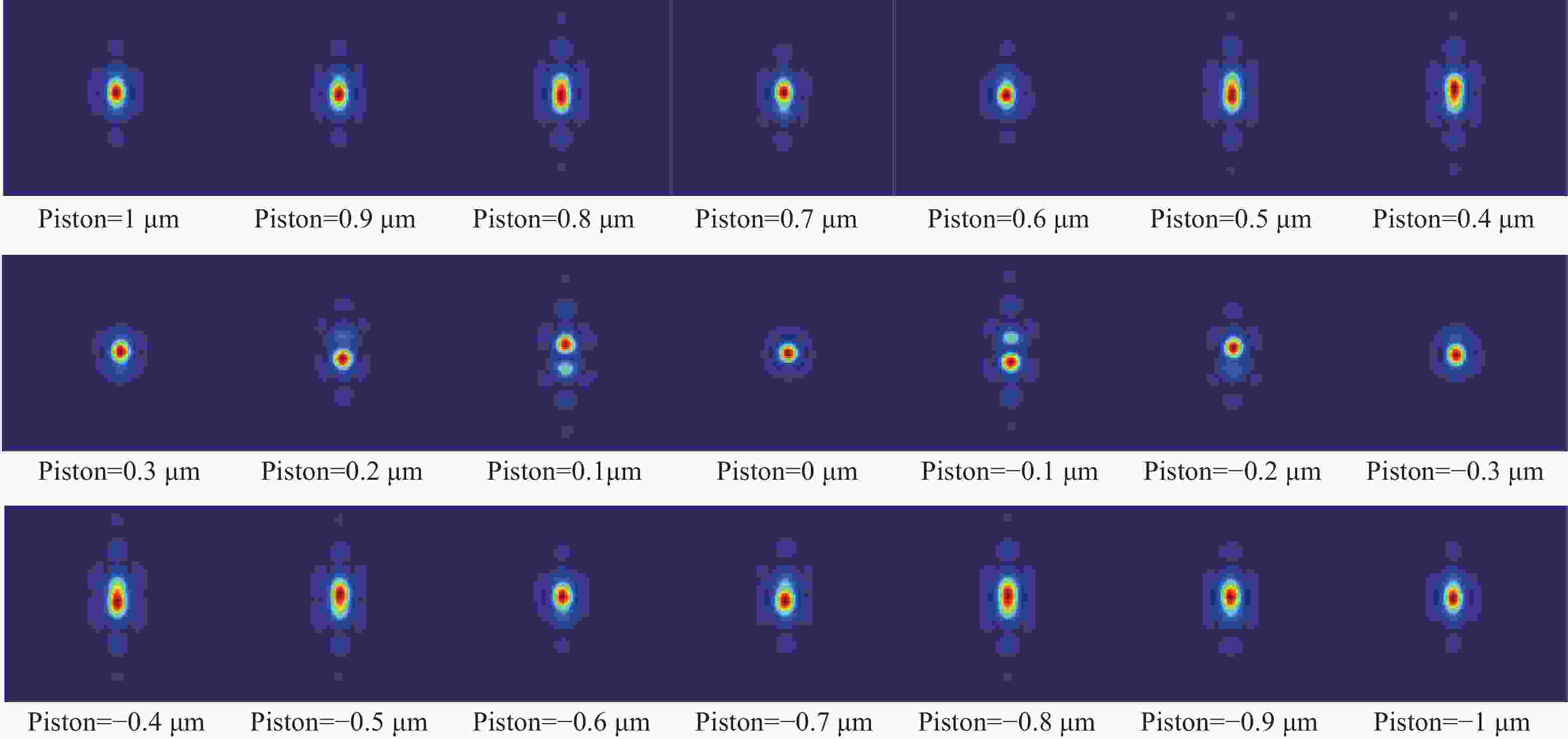
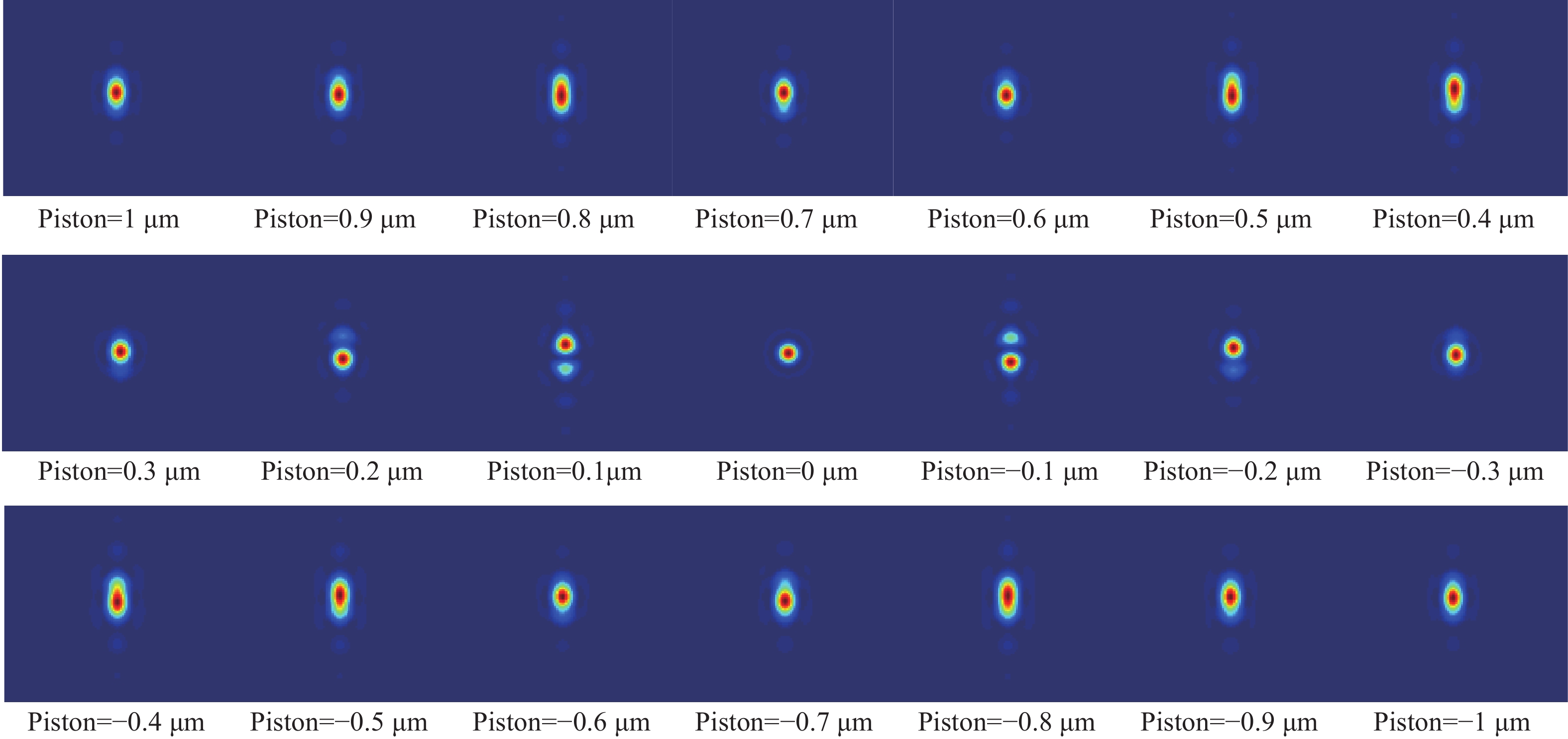
图 2 在400~700 nm带宽下,平移误差从1 μm到−1 μm变化时的理论圆孔衍射图
Figure 2. Theoretical circular diffraction patterns when piston error is varying from 1 μm to −1 μm at 400−700 nm bandwidth
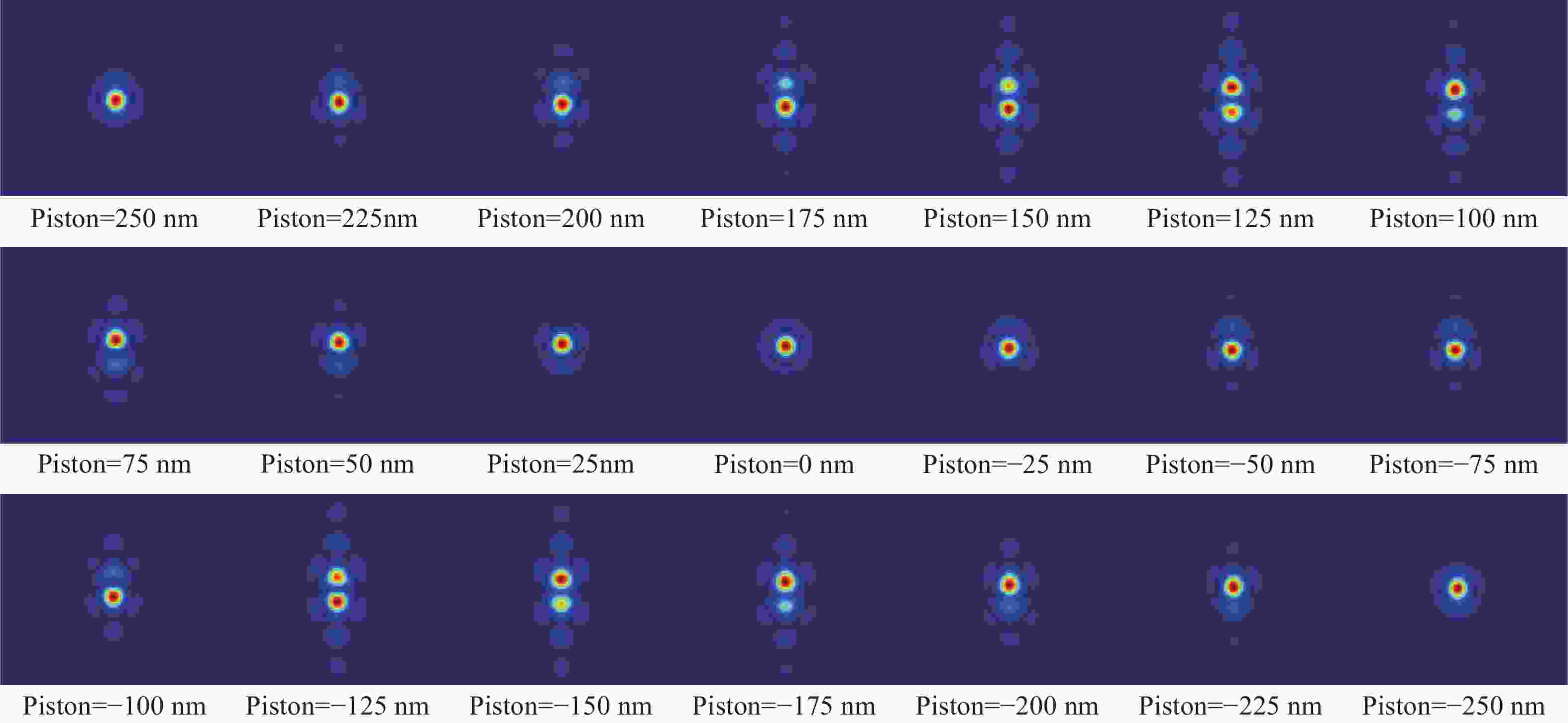
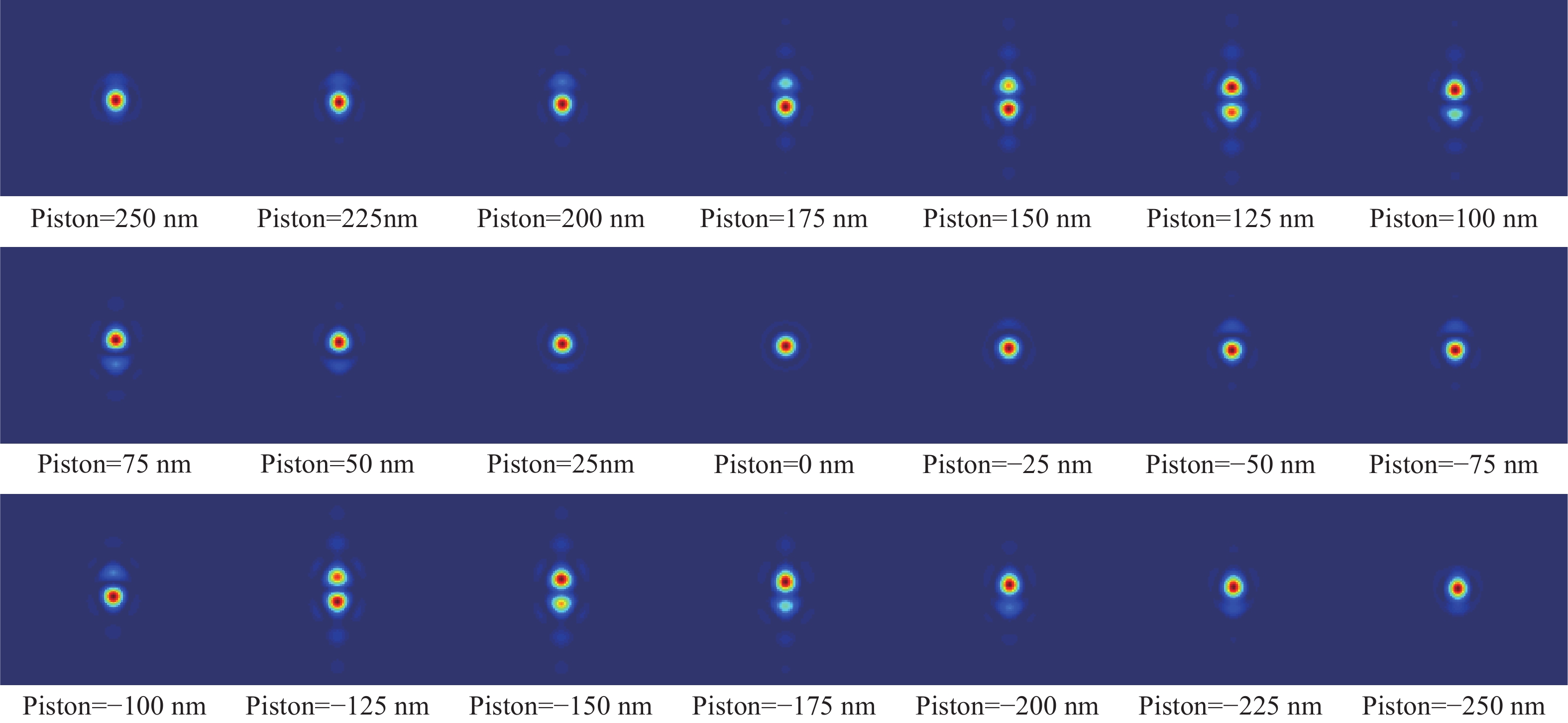
图 3 在400~700 nm带宽下,平移误差从250 nm到−250 nm变化时的理论圆孔衍射图
Figure 3. Theoretical circular diffraction patterns when piston error is varying from 250 nm to −250 nm at 400−700 nm bandwidth
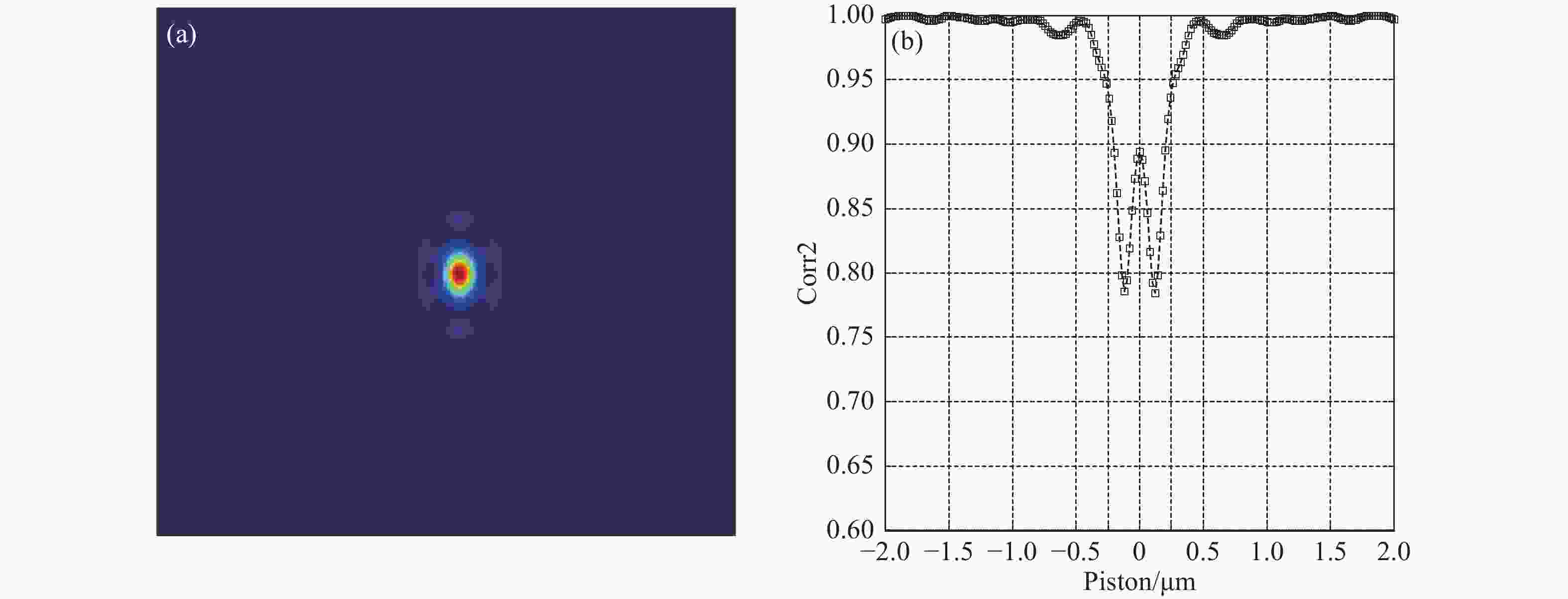
图 4 平移误差大于可见光相干长度时的(a)模板图案和(b)互相关系数Corr2随拼接镜平移误差变化关系图
Figure 4. (a) Template pattern and (b) Corr2 as a function of piston errors when piston error is greater than visible coherence length

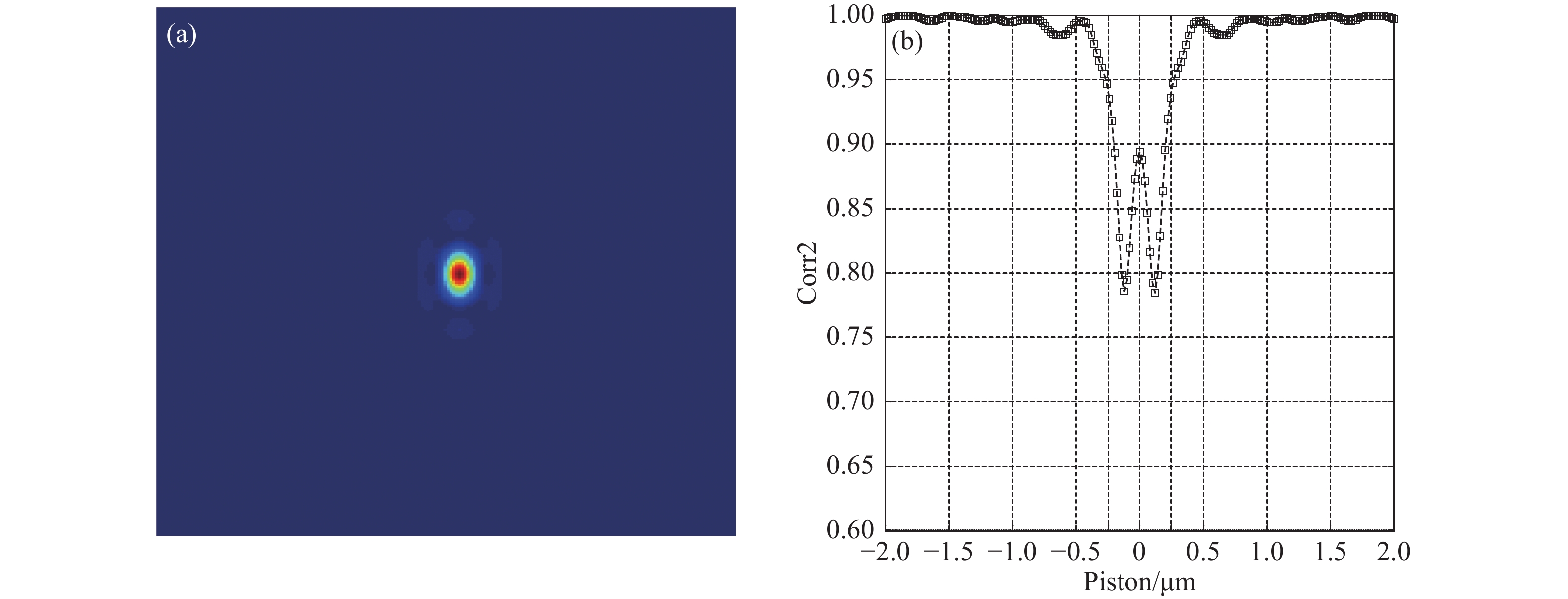
图 5 平移误差在可见光相干长度以内时的(a)模板图案和(b)互相关系数Corr2随拼接镜平移误差变化关系图
Figure 5. (a) Template pattern and (b) Corr2 as a function of piston errors when piston error is within the coherence length of visible light
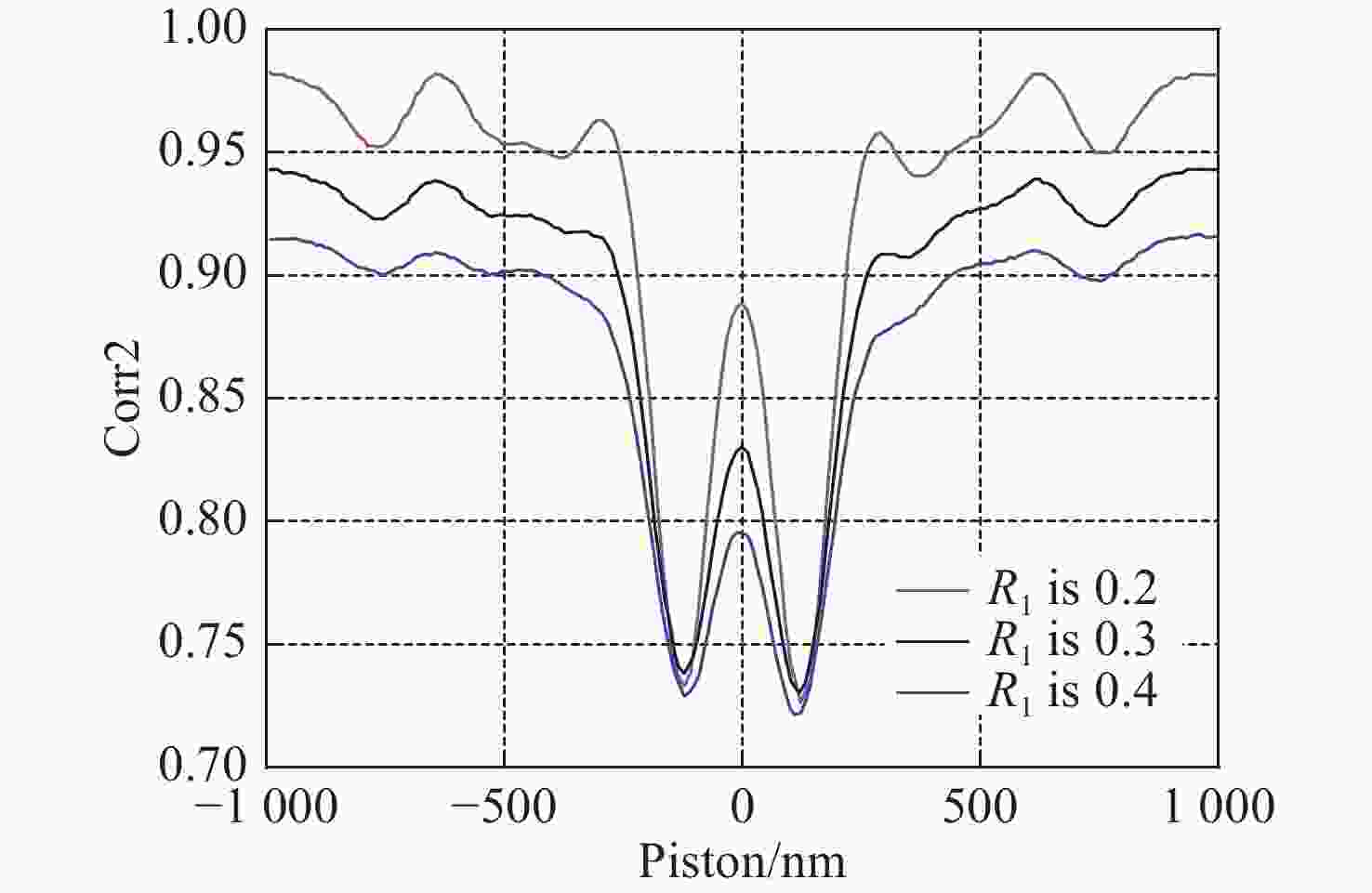
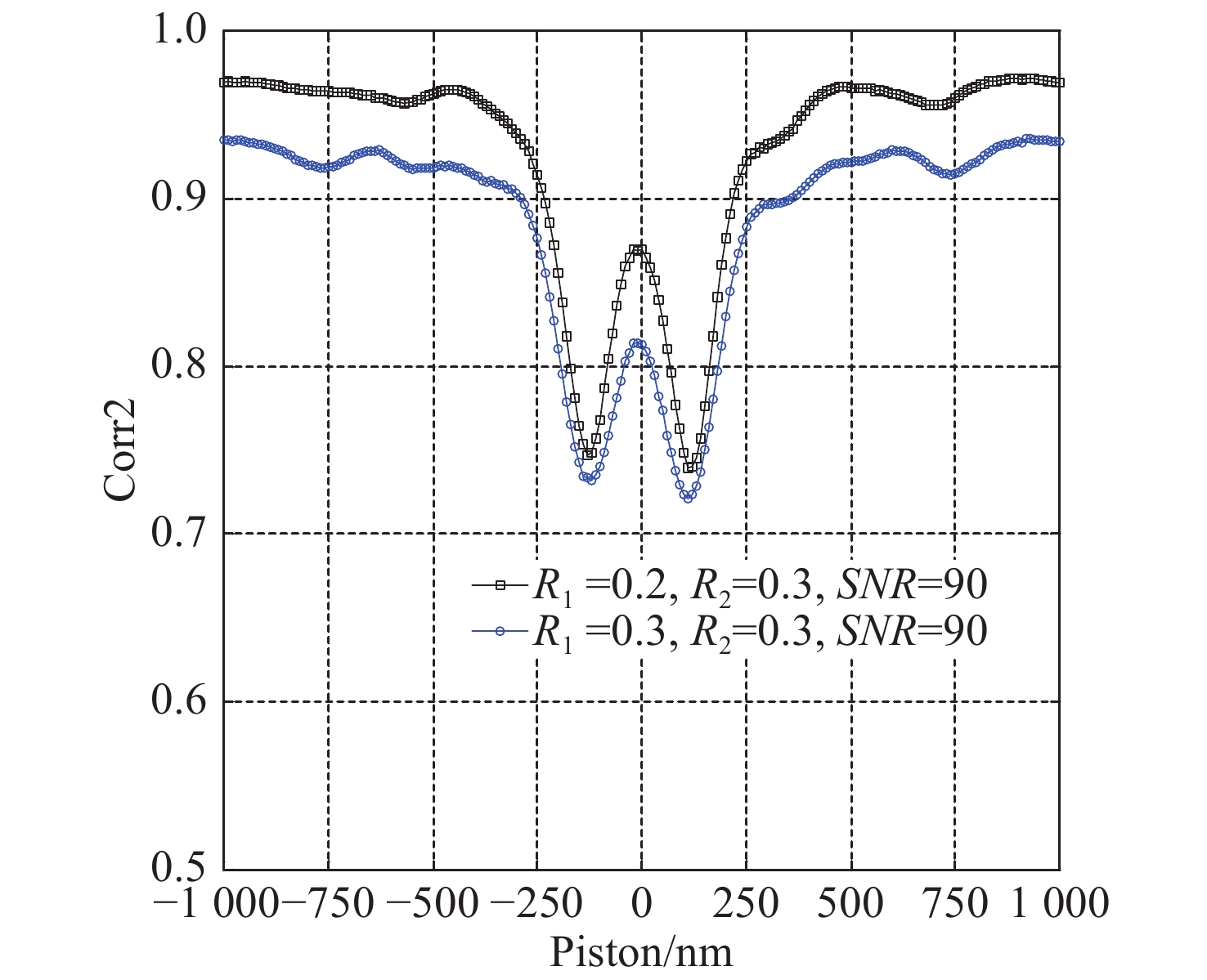
图 6 R1分别为0.2、0.3、0.4时,互相关系数Corr2值与平移误差关系图
Figure 6. Corr2 as a function of piston errors when R1 is 0.2, 0.3 and 0.4

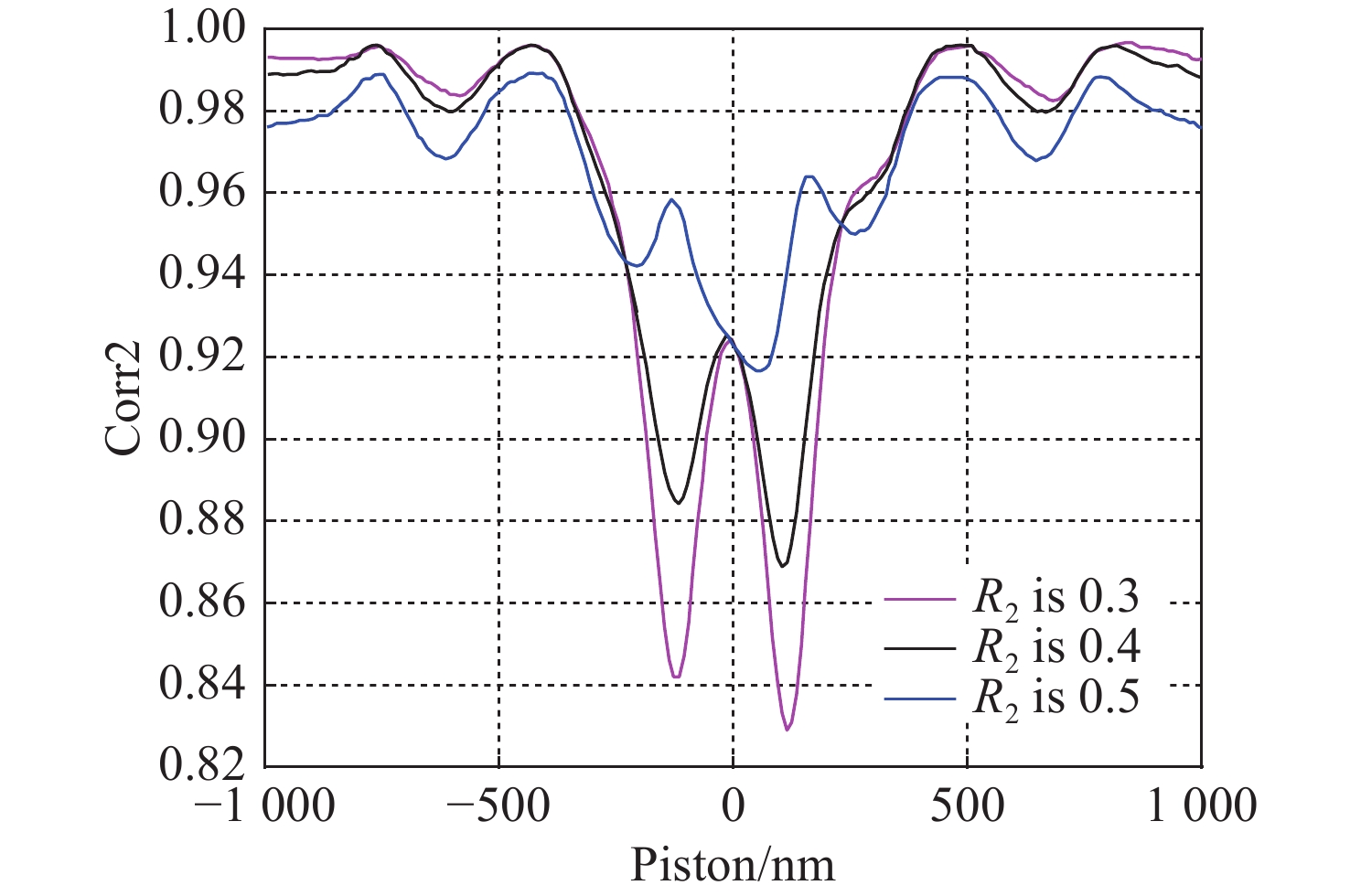
图 7 R2分别为0.3、0.4、0.5时,互相关系数Corr2值与平移误差关系图
Figure 7. Corr2 as a function of piston errors when R2 is 0.3, 0.4 and 0.5
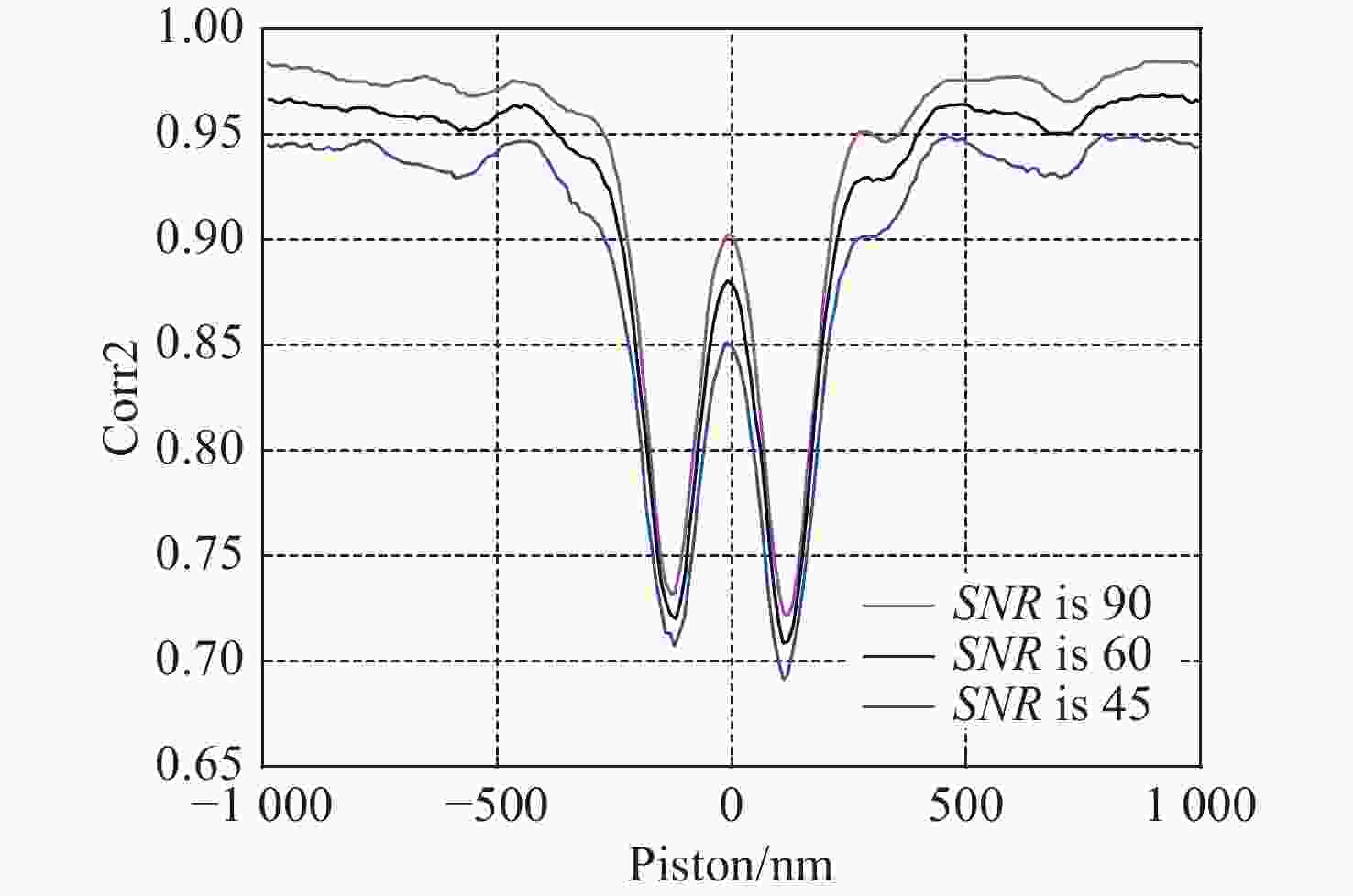
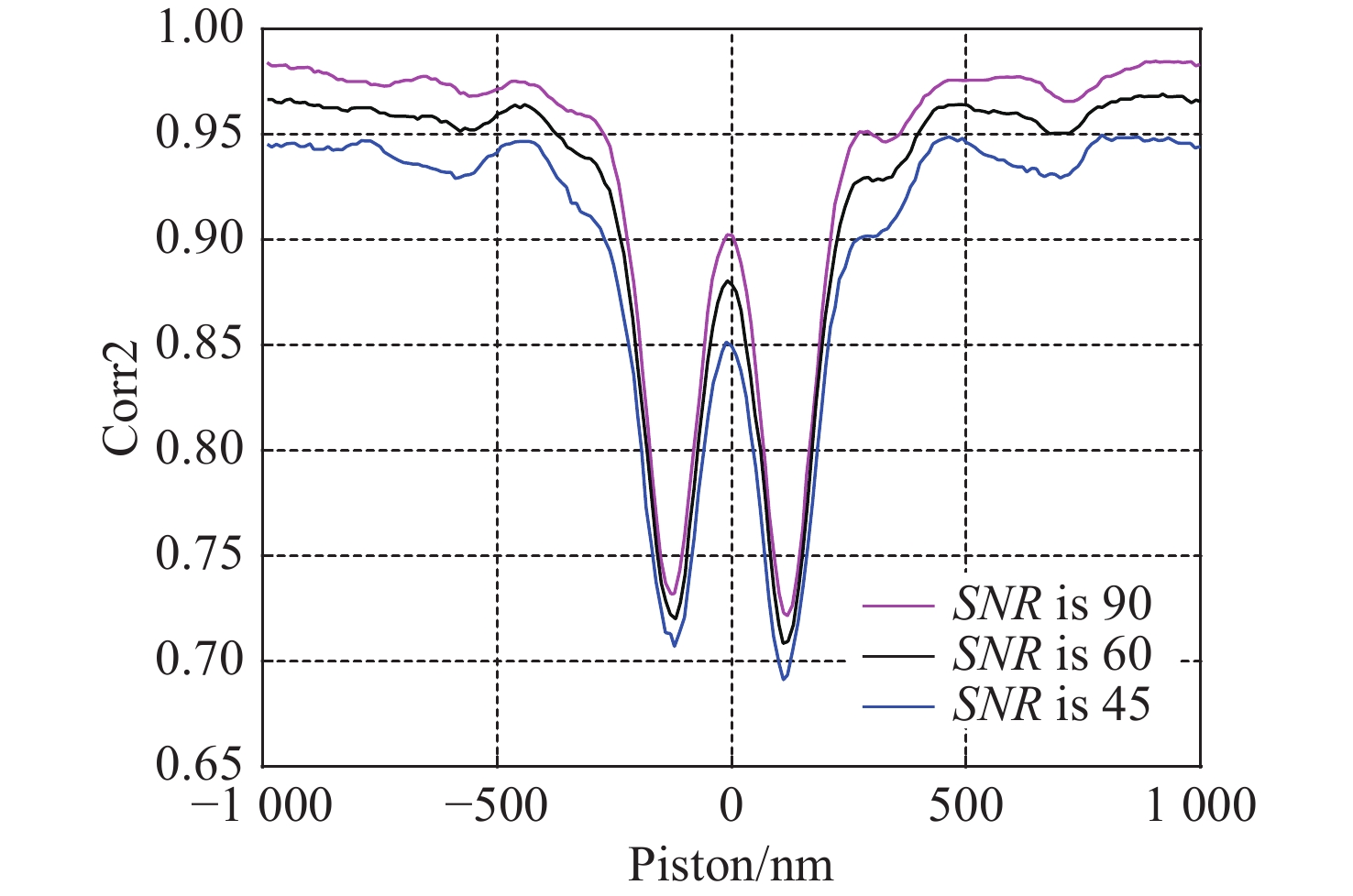
图 8 SNR分别为45、60、90时,互相关系数Corr2值与平移误差关系图
Figure 8. Corr2 as a function of piston errors when SNR is 45, 60 and 90
-
[1] CHANAN G, TROY M. Strehl ratio and modulation transfer function for segmented mirror telescopes as functions of segment phase error[J]. Applied Optics, 1999, 38(31): 6642-6647. doi: 10.1364/AO.38.006642 [2] 徐抒岩, 张旭升, 范阔, 等. 大型光学系统波前检测中气流扰动的抑制[J]. 光学 精密工程,2020,28(1):80-89. doi: 10.3788/OPE.20202801.0080XU SH Y, ZHANG X SH, FAN K, et al. Suppression of airflow turbulence in wavefront measurement for large-aperture optical systems[J]. Optics and Precision Engineering, 2020, 28(1): 80-89. (in Chinese) doi: 10.3788/OPE.20202801.0080 [3] 范文强, 王志臣, 陈宝刚, 等. 地基大口径拼接镜面主动控制技术综述[J]. 中国光学,2020,13(6):1194-1208. doi: 10.37188/CO.2020-0032FAN W Q, WANG ZH C, CHEN B G, et al. Review of the active control technology of large aperture ground telescopes with segmented mirrors[J]. Chinese Optics, 2020, 13(6): 1194-1208. (in Chinese) doi: 10.37188/CO.2020-0032 [4] 周程灏, 王治乐, 朱峰. 大口径光学合成孔径成像技术发展现状[J]. 中国光学,2017,10(1):25-38. doi: 10.3788/co.20171001.0025ZHOU CH H, WANG ZH L, ZHU F. Review on optical synthetic aperture imaging technique[J]. Chinese Optics, 2017, 10(1): 25-38. (in Chinese) doi: 10.3788/co.20171001.0025 [5] 王丰璞, 李新南, 徐晨, 等. 大型光学红外望远镜拼接非球面子镜反衍补偿检测光路设计[J]. 中国光学,2021,14(5):1184-1193. doi: 10.37188/CO.2020-0218WANG F P, LI X N, XU CH, et al. Optical testing path design for LOT aspheric segmented mirrors with reflective-diffractive compensation[J]. Chinese Optics, 2021, 14(5): 1184-1193. (in Chinese) doi: 10.37188/CO.2020-0218 [6] 管雯璐, 谭逢富, 靖旭, 等. 基于环境温度反馈的卡塞格林望远镜自动调焦[J]. 光学 精密工程,2021,29(8):1832-1838. doi: 10.37188/OPE.20212908.1832GUAN W L, TAN F F, JING X, et al. Automatic focusing of Cassegrain telescope based on environmental temperature feedback[J]. Optics and Precision Engineering, 2021, 29(8): 1832-1838. (in Chinese) doi: 10.37188/OPE.20212908.1832 [7] 顾伯忠, 陈萌, 乐中宇. 大型望远镜主镜室碳纤维桁架单元的优化[J]. 光学 精密工程,2021,29(9):2116-2125. doi: 10.37188/OPE.20212909.2116GU B ZH, CHEN M, YUE ZH Y. Optimization of carbon fiber truss element for primary mirror chamber of large telescope[J]. Optics and Precision Engineering, 2021, 29(9): 2116-2125. (in Chinese) doi: 10.37188/OPE.20212909.2116 [8] ZHANG D, ZHANG X B, XU SH Y, et al. Simplified phase diversity algorithm based on a first-order Taylor expansion[J]. Applied Optics, 2016, 55(28): 7872-7877. doi: 10.1364/AO.55.007872 [9] ORLOV V G, CUEVAS S, GARFIAS F, et al. Co-phasing of segmented mirror telescopes with curvature sensing[J]. Proceedings of SPIE, 2000, 4004: 540-551. doi: 10.1117/12.393930 [10] CAO H F, ZHANG J X, YANG F, et al. Extending capture range for piston error in segmented primary mirror telescopes based on wavelet support vector machine with improved particle swarm optimization[J]. IEEE Access, 2020, 8: 111585-111597. doi: 10.1109/ACCESS.2020.3002901 [11] CHANAN G, TROY M, DEKENS F, et al. Phasing the mirror segments of the Keck telescopes: the broadband phasing algorithm[J]. Applied Optics, 1998, 37(1): 140-155. doi: 10.1364/AO.37.000140 [12] CHANAN G, OHARA C, TROY M. Phasing the mirror segments of the Keck telescopes II: the narrow-band phasing algorithm[J]. Applied Optics, 2000, 39(25): 4706-4714. doi: 10.1364/AO.39.004706 [13] LI X Y, YANG X, WANG SH Q, et al. The piston error recognition technique used in the modified Shack–Hartmann sensor[J]. Optics Communications, 2021, 501: 127388. doi: 10.1016/j.optcom.2021.127388 [14] 林旭东, 王建立, 刘欣悦, 等. 拼接镜主动光学共相实验[J]. 光学 精密工程,2010,18(7):1520-1528.LIN X D, WANG J L, LIU X Y, et al. Co-phase experiment of active optics for segmented-mirrors[J]. Optics and Precision Engineering, 2010, 18(7): 1520-1528. (in Chinese) [15] ESPOSITO S, PINNA E, TOZZI A, et al. Cophasing of segmented mirrors using the pyramid sensor[J]. Proceedings of SPIE, 2003, 5169: 72-78. doi: 10.1117/12.511507 [16] ZHANG Y F, XIAN H. Coarse co-phasing method based on slope of visibility-enhanced dispersed fringe pattern for segmented telescope[J]. Optics Communications, 2020, 459: 124998. doi: 10.1016/j.optcom.2019.124998 [17] ZHANG Y F, XIAN H. Piston sensing for a segmented mirror system via a digital dispersed fringe generated by wavelength tuning[J]. Optics Letters, 2020, 45(5): 1051-1054. doi: 10.1364/OL.385262 [18] LI B, YU W H, TANG J L, et al. Theory and experiment of phasing detection by use of two wavelengths[J]. Applied Optics, 2017, 56(1): 1-7. doi: 10.1364/AO.56.000001 [19] LI B, YU W H, CHEN M, et al. Co-phasing experiment of a segmented mirror using a combined broadband and two-wavelength algorithm[J]. Applied Optics, 2017, 56(32): 8871-8879. doi: 10.1364/AO.56.008871 [20] LI B, YU W H, CHEN M, et al. Co-focus experiment of segmented mirror[J]. Chinese Physics B, 2017, 26(6): 060706. doi: 10.1088/1674-1056/26/6/060706 [21] WANG Y R, JIANG F Y, JU G H, et al. Deep learning wavefront sensing for fine phasing of segmented mirrors[J]. Optics Express, 2021, 29(16): 25960-25978. doi: 10.1364/OE.434024 [22] MA X F, XIE Z L, MA H T, et al. Piston sensing for sparse aperture systems with broadband extended objects via a single convolutional neural network[J]. Optics and Lasers in Engineering, 2020, 128: 106005. doi: 10.1016/j.optlaseng.2020.106005 [23] 李斌, 吴建, 刘燕德, 等. 拼接镜主动共相实验研究[J]. 光子学报,2018,47(2):0212003.LI B, WU J, LIU Y D, et al. Co-phasing experiment of active optics for segmented mirror[J]. Acta Photonica Sinica, 2018, 47(2): 0212003. (in Chinese) [24] 李斌, 刘燕德, 谢锋云. 拼接镜新型粗共相检测方法[J]. 光学 精密工程,2018,26(11):2647-2653. doi: 10.3788/OPE.20182611.2647LI B, LIU Y D, XIE F Y. Coarse co-phasing detection of segmented mirrors[J]. Optics and Precision Engineering, 2018, 26(11): 2647-2653. (in Chinese) doi: 10.3788/OPE.20182611.2647 -

 下载:
下载:




计量
- 文章访问数: 695
- HTML全文浏览量: 414
- PDF下载量: 120
- 被引次数: 0
