


Photoelectric tracking servo control method based on active disturbance rejection algorithm
-
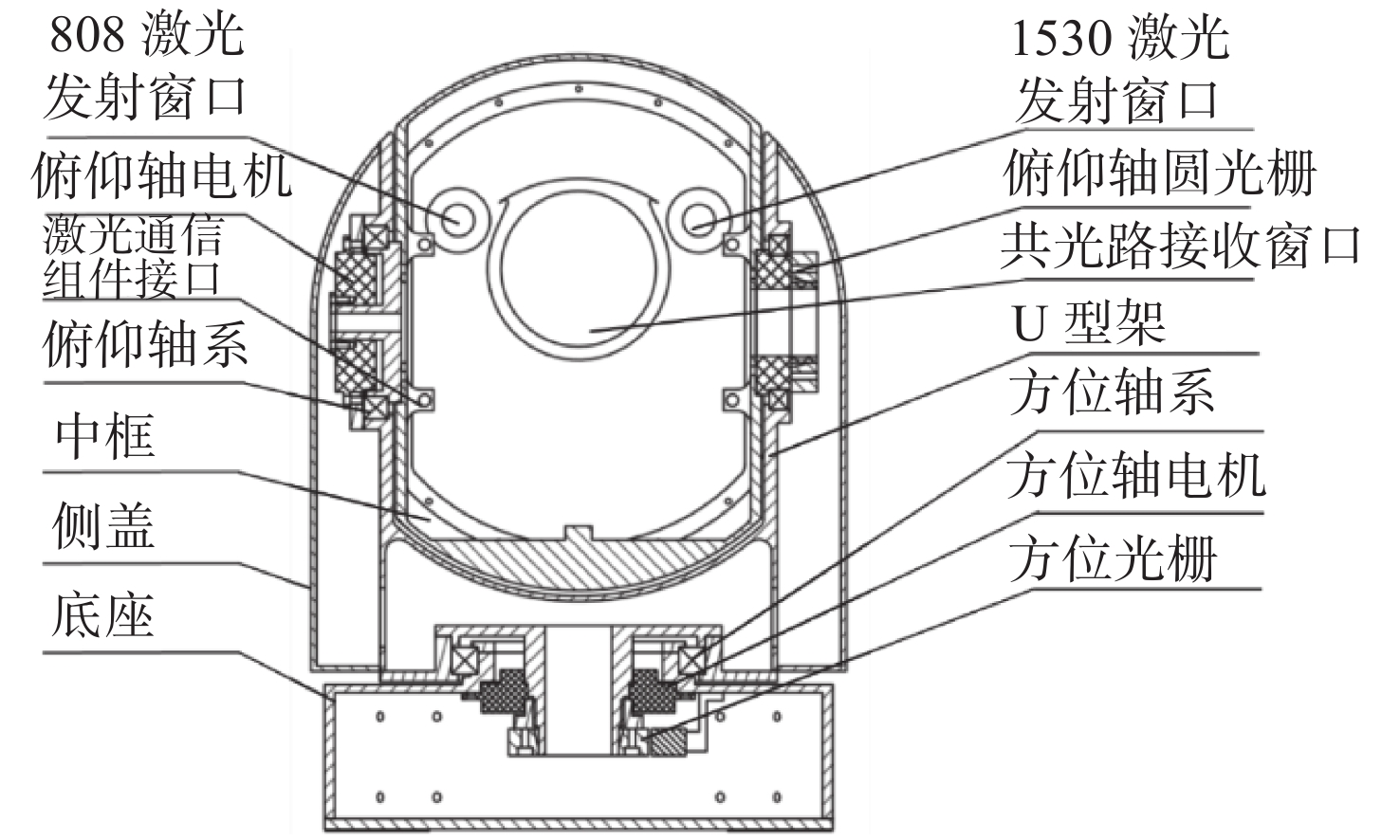
摘要: 为提高光电跟踪控制系统的跟踪速度和稳态精度,本文对光电跟踪伺服系统的控制方法进行了研究。首先,为了满足系统功能和性能指标要求,对伺服转台进行了结构设计。然后,设计自抗扰控制算法,得到了跟踪微分器、线性扩张状态观测器及状态误差反馈控制律。接着,在Matlab/Simulink中建立了基于自抗扰算法的跟踪伺服系统模型,位置环和速度环采取了二阶自抗扰控制策略,电流环采取了PI控制策略。仿真分析结果表明,定位跟踪时可实现无超调,并具有最快的响应速度,突加扰动时,动态降落最大值为3%,正弦跟踪误差小于0.02°。仿真结果验证了基于自抗扰控制算法的光电跟踪控制系统,在快速响应、稳态精度和抗扰性能等方面均具有较好的控制效果。Abstract: In order to improve the tracking stability and accuracy of photoelectric tracking control system, the control method of photoelectric tracking servo system is studied in this paper. Firstly, in order to meet the requirements of system function and performance index, the structure of the servo turntable is designed. Then, the linear Active Disturbance Rejection Control (ADRC) algorithm is designed, tracking differentiator and the linear extended state observer and state error feedback control law are obtained. Then, the model of tracking servo system based on ADRC algorithm is established with Matlab/Simulink, in which the position loop and speed loop adopt the second-order ADRC strategy, and the current loop adopts the PI control strategy. The simulation results show that zero overshoots can be realized during positioning tracking, and the fastest response speed can be achieved. When sudden disturbance is added, the maximum value of dynamic landing is 3%, and the sinusoidal tracking error can reach 0.02°, demonstrating that the photoelectric tracking control system based on ADRC algorithm has good results in fast response, steady-state accuracy and anti-interference performance.
-
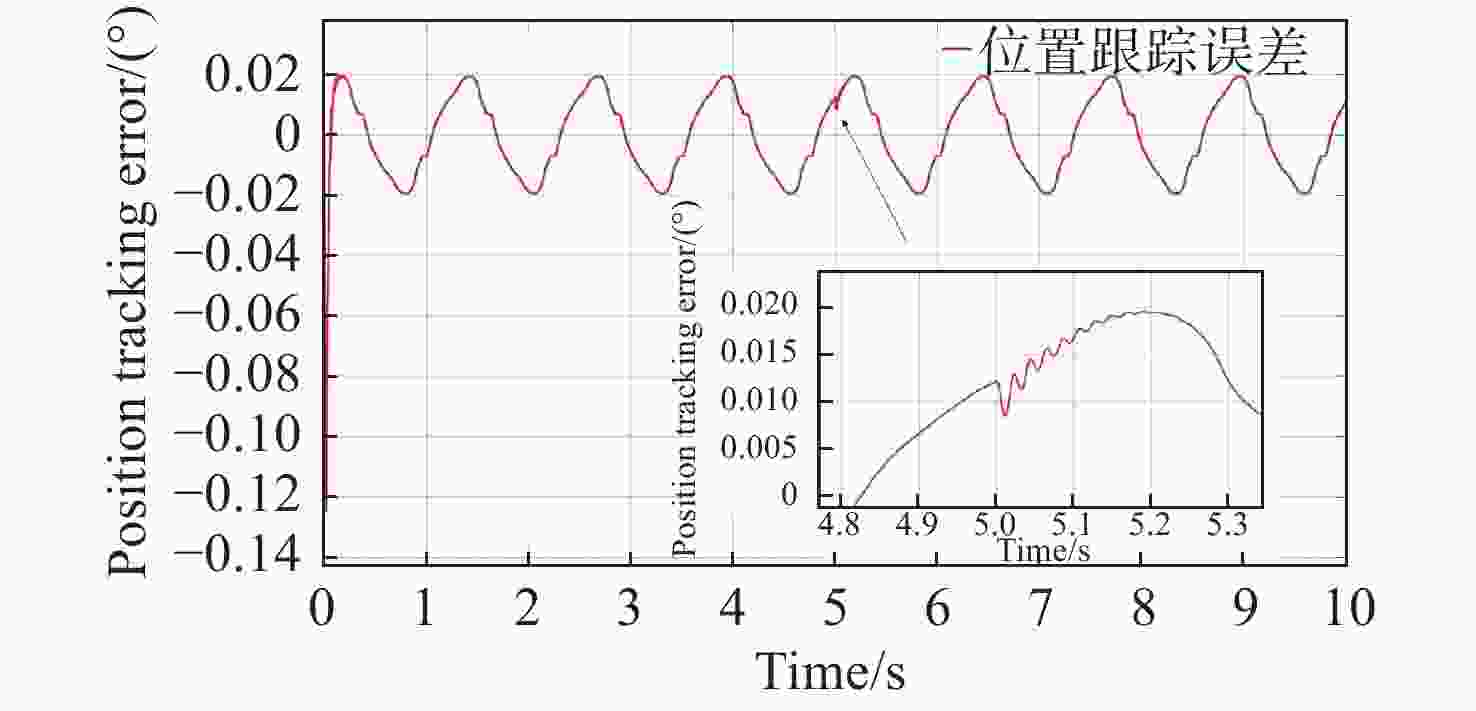
图 7 正弦跟踪信号下的位置跟踪误差曲线
Figure 7. Position tracking error curve under sinusoidal tracking signal
表 1 直流电机参数
Table 1. DC motor parameters
俯仰轴 方位轴 电机型号 NH85LYX-M1.4-E27 NH73LYX-M0.45-E48 峰值电压 24 V 48 V 峰值电流 1 A 1.5 A 峰值力矩 0.18 N·m 0.45 N·m 最大空载转速 1200 r/min 1400 r/min  下载: 导出CSV
下载: 导出CSV
-
[1] 黄宗卫, 范越. 基于改进PID算法的干扰设备控制方法研究[J]. 机电工程技术,2020,49(7):225-226. doi: 10.3969/j.issn.1009-9492.2020.07.079HUANG Z W, FAN Y. Research on control method of jamming equipment based on improved PID algorithm[J]. Mechanical &Electrical Engineering Technology, 2020, 49(7): 225-226. (in Chinese) doi: 10.3969/j.issn.1009-9492.2020.07.079 [2] 邹冀, 伞晓刚, 李耀彬, 等. 光电经纬仪转台动态特性研究[J]. 激光与红外,2019,49(1):93-98. doi: 10.3969/j.issn.1001-5078.2019.01.016ZOU J, SAN X G, LI Y B, et al. Dynamic characteristics study of opto-electronic theodolite turntable[J]. Laser &Infrared, 2019, 49(1): 93-98. (in Chinese) doi: 10.3969/j.issn.1001-5078.2019.01.016 [3] 汤其剑. 高精度多轴稳定平台指向误差的分析与研究[D]. 天津: 天津大学, 2014.TANG Q J. Analysis and research of pointing error of high precision multi-axis stabilized platform[D]. Tianjin: Tianjin University, 2014. (in Chinese) [4] 邓科. 惯性稳定平台的建模分析与高精度控制[D]. 合肥: 中国科学技术大学, 2016.DENG K. Modelling analysis and high precision control of inertially stabilized platform[D]. Hefei: University of Science and Technology of China, 2016. (in Chinese) [5] 牛峰, 曹石然, 王尧, 等. PWM电机系统漏电流分析[J]. 电工技术学报,2019,34(8):1599-1606.NIU F, CAO SH R, WANG Y, et al. Analysis of leakage current in PWM motor system[J]. Transactions of China Electrotechnical Society, 2019, 34(8): 1599-1606. (in Chinese) [6] HAN J Q. From PID to active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900-906. doi: 10.1109/TIE.2008.2011621 [7] ANG K H, CHONG G, LI Y. PID control system analysis, design, and technology[J]. IEEE Transactions on Control Systems Technology, 2005, 13(4): 559-576. doi: 10.1109/TCST.2005.847331 [8] ZHANG J Q, LIU Y K, GAO S J, et al. Control technology of ground-based laser communication servo turntable via a novel digital sliding mode controller[J]. Applied Sciences, 2019, 9(19): 4051. doi: 10.3390/app9194051 [9] 赵瑞, 闫剑虹. 基于自抗扰控制的电流环控制器设计[J]. 微电机,2019,52(3):41-47. doi: 10.3969/j.issn.1001-6848.2019.03.010ZHAO R, YAN J H. Current loop controller design based on active disturbance rejection control[J]. Micromotors, 2019, 52(3): 41-47. (in Chinese) doi: 10.3969/j.issn.1001-6848.2019.03.010 [10] 王卫兵. 光电跟踪伺服系统控制策略理论与实验研究[D]. 长春: 中国科学院长春光学精密机械与物理研究所, 2012.WANG W B. Research in theory and experiment of control strategies for opto-electronics tracking servo system[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2012. (in Chinese) [11] 慕巍, 张宝宜, 王新明, 等. 适用于光电跟踪仪的高速目标跟踪控制算法[J]. 激光与红外,2020,50(4):468-474. doi: 10.3969/j.issn.1001-5078.2020.04.015MU W, ZHANG B Y, WANG X M, et al. High speed target tracking control algorithm for electro-optical tracker[J]. Laser &Infrared, 2020, 50(4): 468-474. (in Chinese) doi: 10.3969/j.issn.1001-5078.2020.04.015 [12] 雷晓瑜, 曹广忠. TMS320F28335及其最小应用系统设计[J]. 电子设计工程,2009,17(1):91-92,95. doi: 10.3969/j.issn.1674-6236.2009.01.034LEI X Y, CAO G ZH. Design of TMS320F28335 and its minimum application system[J]. Electronic Design Engineering, 2009, 17(1): 91-92,95. (in Chinese) doi: 10.3969/j.issn.1674-6236.2009.01.034 [13] 崔宁豪. 双轴跟踪转台伺服控制系统的建模及控制方法研究[D]. 合肥: 安徽大学, 2020.CUI N H. Research on modeling and control method of servo control system for dual-axis tracking turntable[D]. Hefei: Anhui University, 2020. -

 下载:
下载:


图(8) / 表(1)
计量
- 文章访问数: 856
- HTML全文浏览量: 569
- PDF下载量: 205
- 被引次数: 0
