


Design of compound eye optical system with hexagonal band arrangement and common optical path
-
摘要:
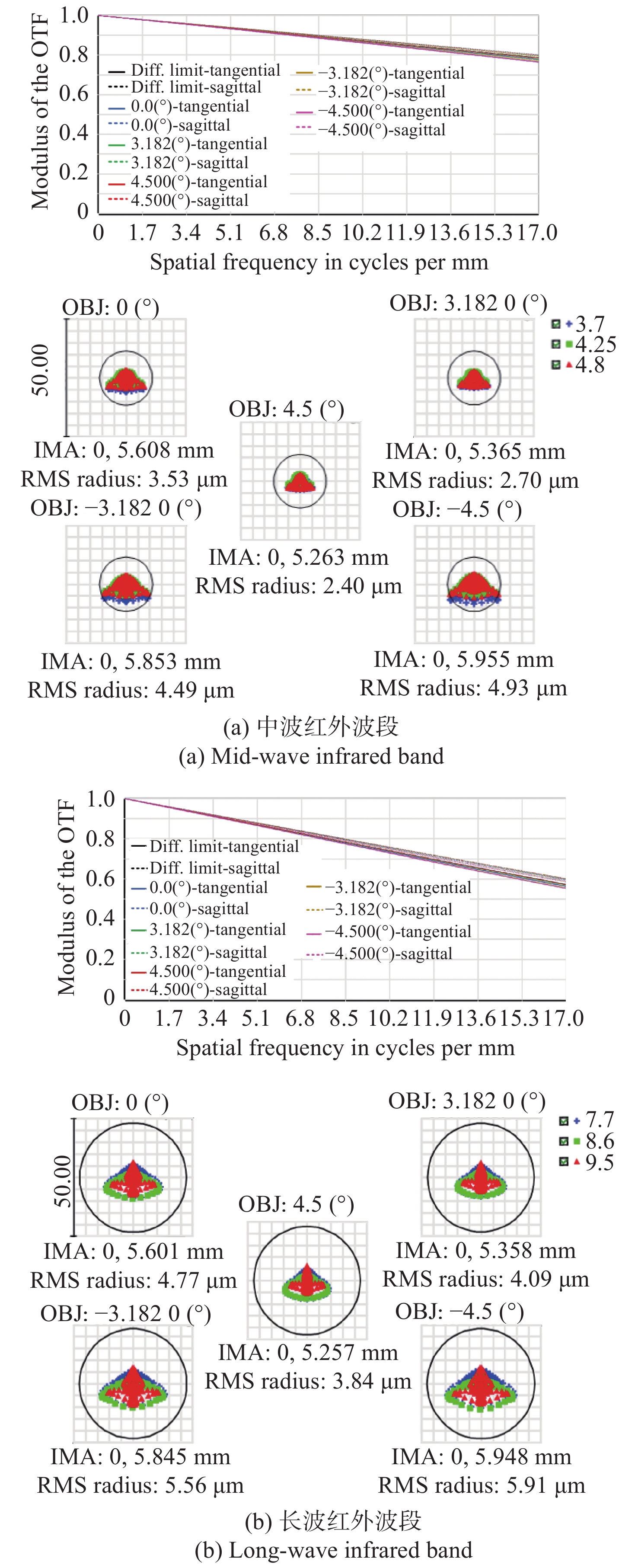
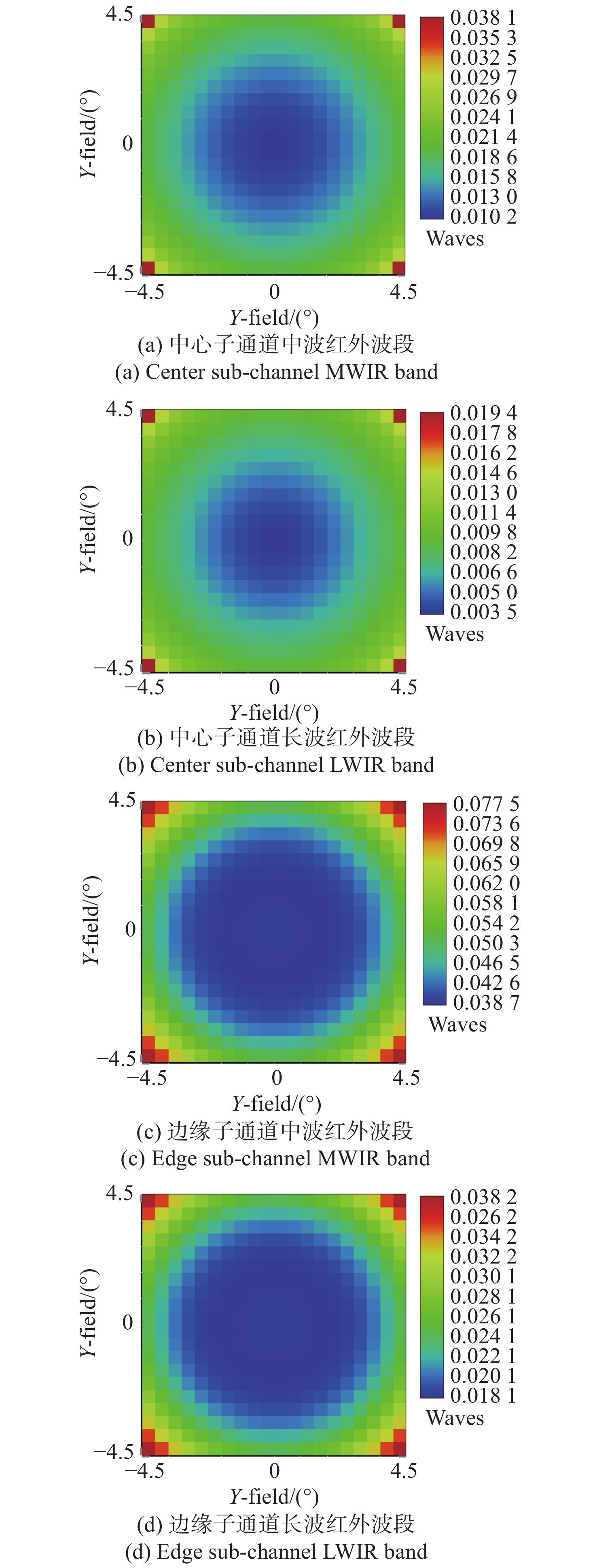
为解决仿生复眼系统目前普遍存在的空间利用率较低、子眼孔径较小问题,本文提出一种六边形环带排布的大孔径复眼系统设计方法,通过引入填充因子理论,以传统曲面圆周式排布为对照组,论证了六边形环带排布模型可有效提高大孔径复眼系统的空间利用率。针对单波段复眼系统获取目标信息量有限的问题,设计采用红外双波段共光路的成像结构形式,辅以红外双色探测器接收,增强了复眼系统获取目标信息的多维度能力,同时建立了六边形环带排布方式的子孔径定位数学模型。仿生复眼系统共由91个子孔径组成,子孔径入瞳为16 mm,焦距为48 mm,视场角为9°,子孔径合成总视场为96°×85°,中继转像系统焦距为6.14 mm,子眼系统和中继转像系统在−40 °C~+60 °C温度变化范围内无热差影响,探测器冷反射效应可忽略。对复眼系统进行组合,仿真结果表明:各个光学子通道均方根(RMS)半径均小于艾里斑,光学畸变值均小于0.1%,边缘子通道红外中波/长波波段调制传递函数(MTF)在17 lp/mm处均达到0.5以上。该系统结构紧凑、探测能力强,可用于复杂环境中多目标的探测与识别。
Abstract:In order to solve the challenges of low space utilization and small aperture size for the sub-eye in bionic compound eye systems, a design method for a large aperture compound eye system with a hexagonal band arrangement is proposed in this paper. Using the filling factor theory, taking the traditional curved surface circular arrangement as the control group, it is demonstrated that the hexagonal band arrangement model can effectively improve the space utilization of a large-aperture compound eye system. Aiming at the limited target information acquisition of a single-band compound eye system, an infrared dual-band common optical path imaging form was designed, supplemented by a two-color image sensor, which enhanced the multi-dimensional ability of the compound eye system to obtain information. At the same time, a mathematical model of the sub-aperture positioning of the hexagonal band arrangement is established. The bionic compound eye system is composed of 91 sub-apertures with an entrance pupil diameter of 16 mm, a focal length of 48 mm and a field of view of 9°. The combined total field of view of the sub-apertures is 96°×85°. The focal length of the relay system is 6.14 mm. In a temperature range of −40 °C~+60 °C, the sub-aperture and the relay systems basically have no influence from thermal differences. The cold reflection effect of the detector can be ignored. The simulation results show that the Root Mean Square (RMS) radius of each sub-channel is smaller than the airy spot and the optical distortion value of each sub-channel is less than 0.1%. The Modulation Transfer Function (MTF) of the edge sub-channel in the MWIR/LWIR band is above 0.5 at 17 lp/mm. The system has a compact structure and strong detection ability, and can be used for multi-target detection and recognition in complex environments.
-
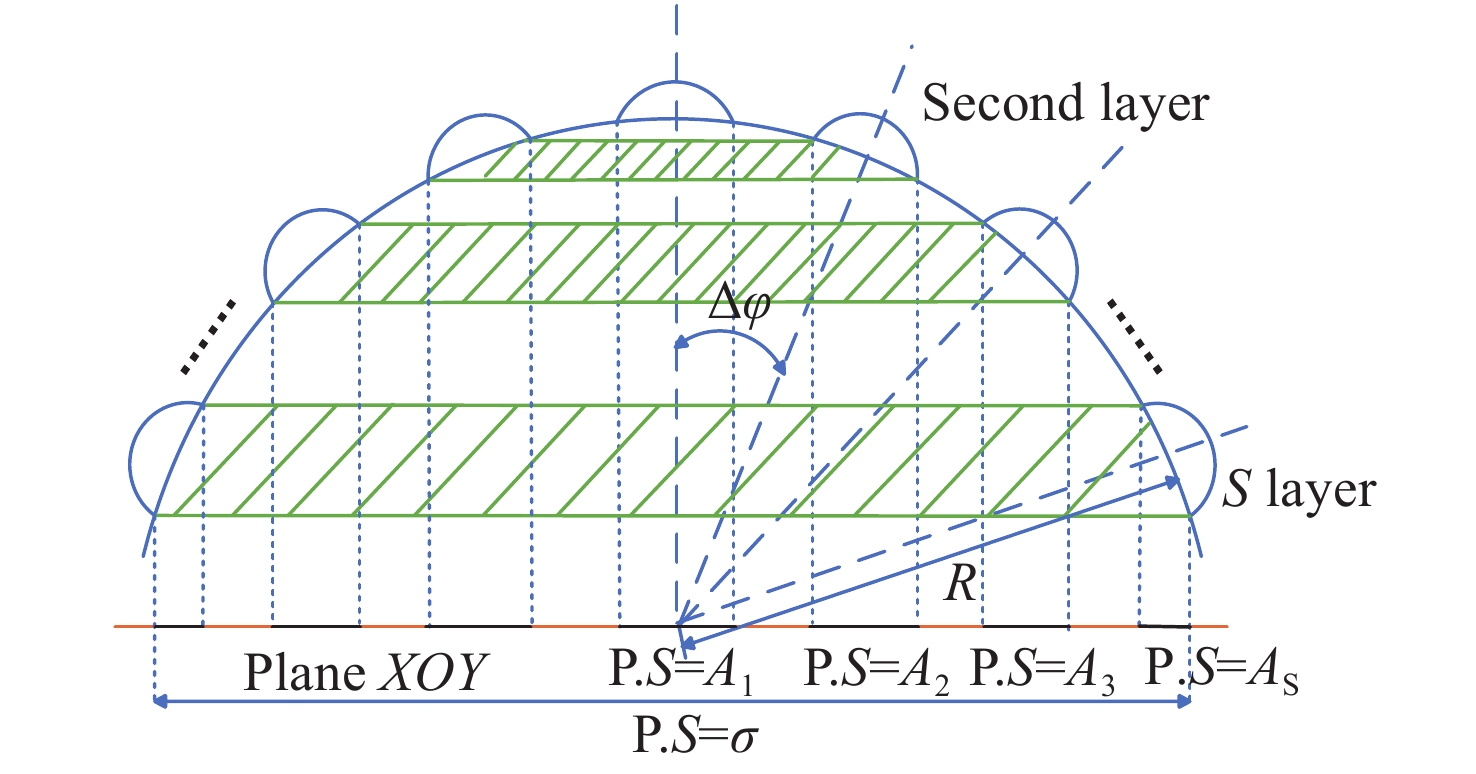
图 2 主阵列子孔径投影示意图
Figure 2. Schematic diagram of main array direction sub aperture projection
图 3 两种排布模型子孔径投影对比图
Figure 3. Sub aperture projection contrast of two arrangement models
图 10 主阵列平面方向排布子孔径二维模型图
Figure 10. 2D model diagram of sub-apertures arranged in the plane direction of the main array
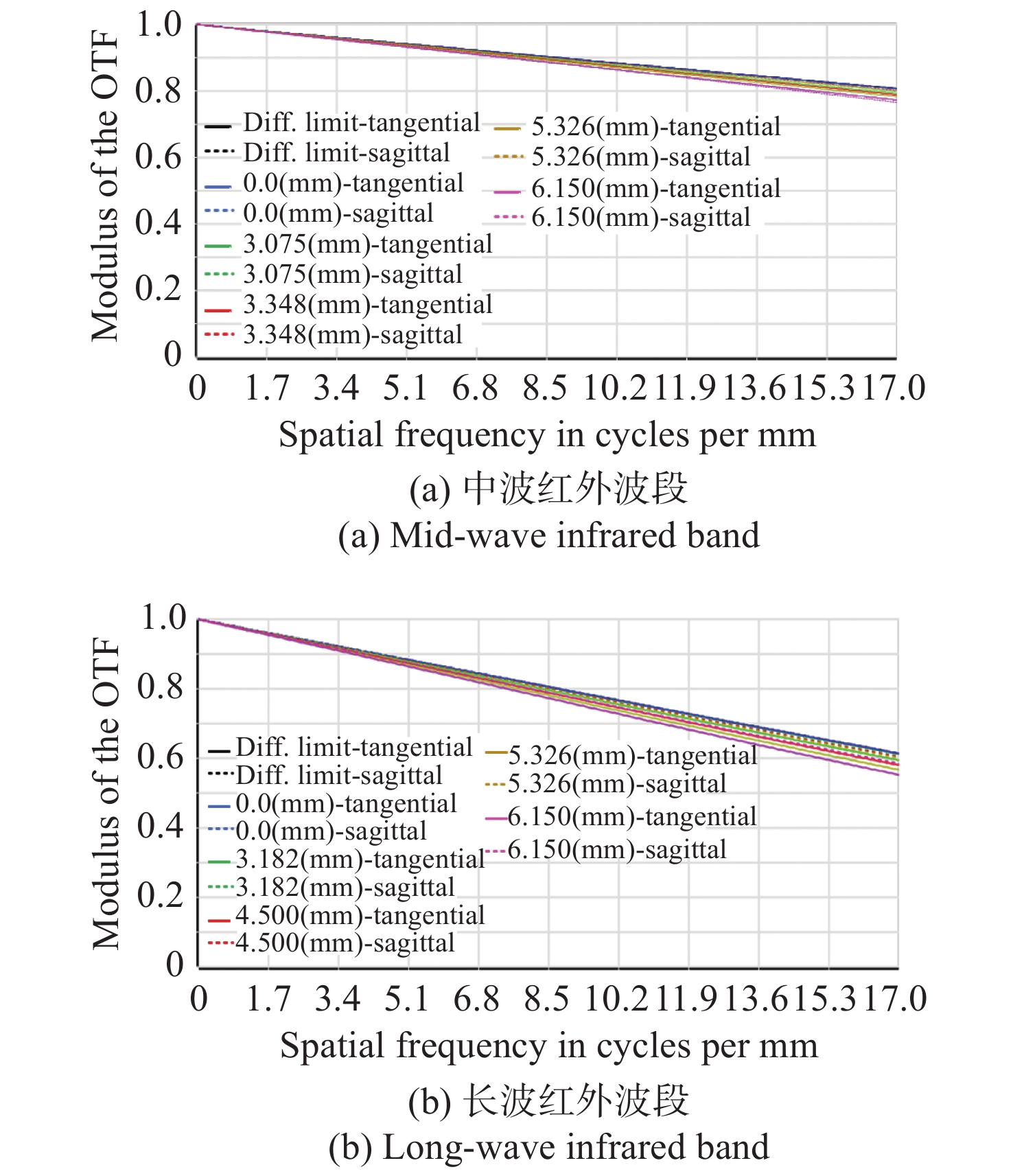
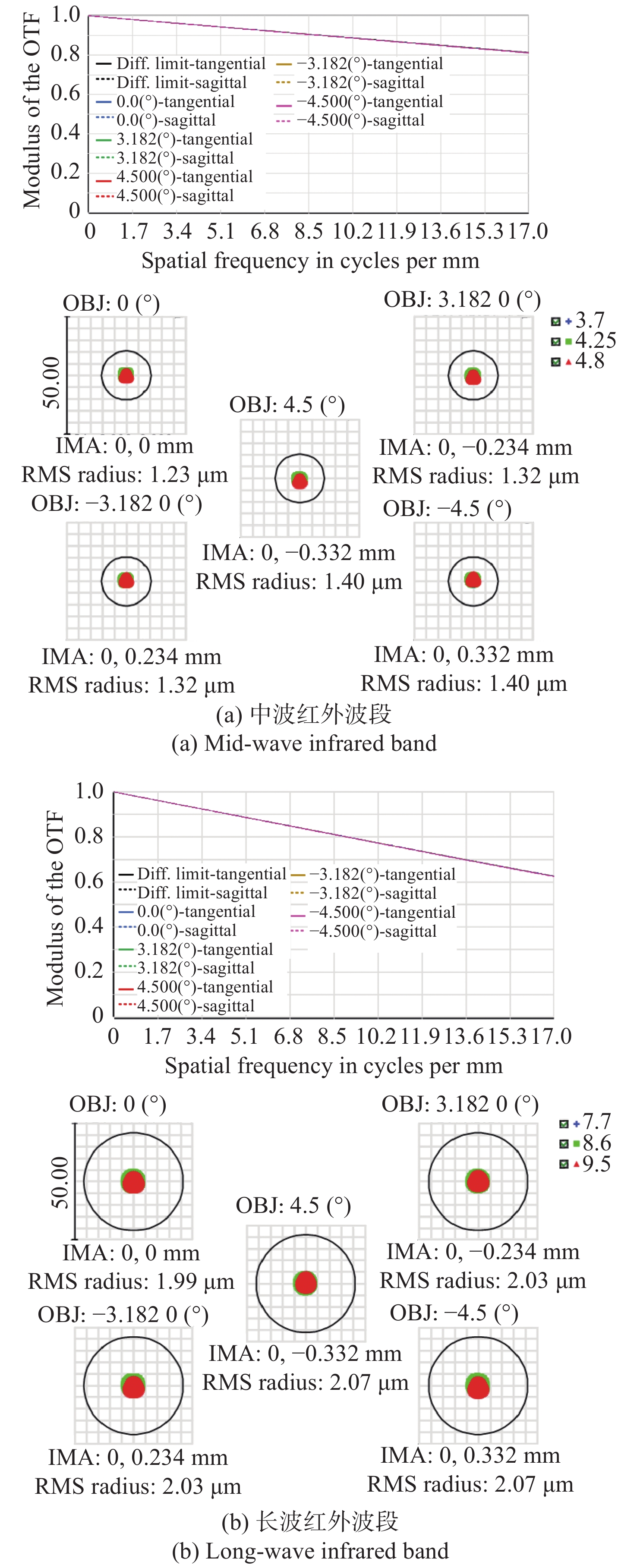
图 15 子孔径系统不同波段高低温下的MTF曲线
Figure 15. MTF of sub aperture system at different bands at high and low temperatures

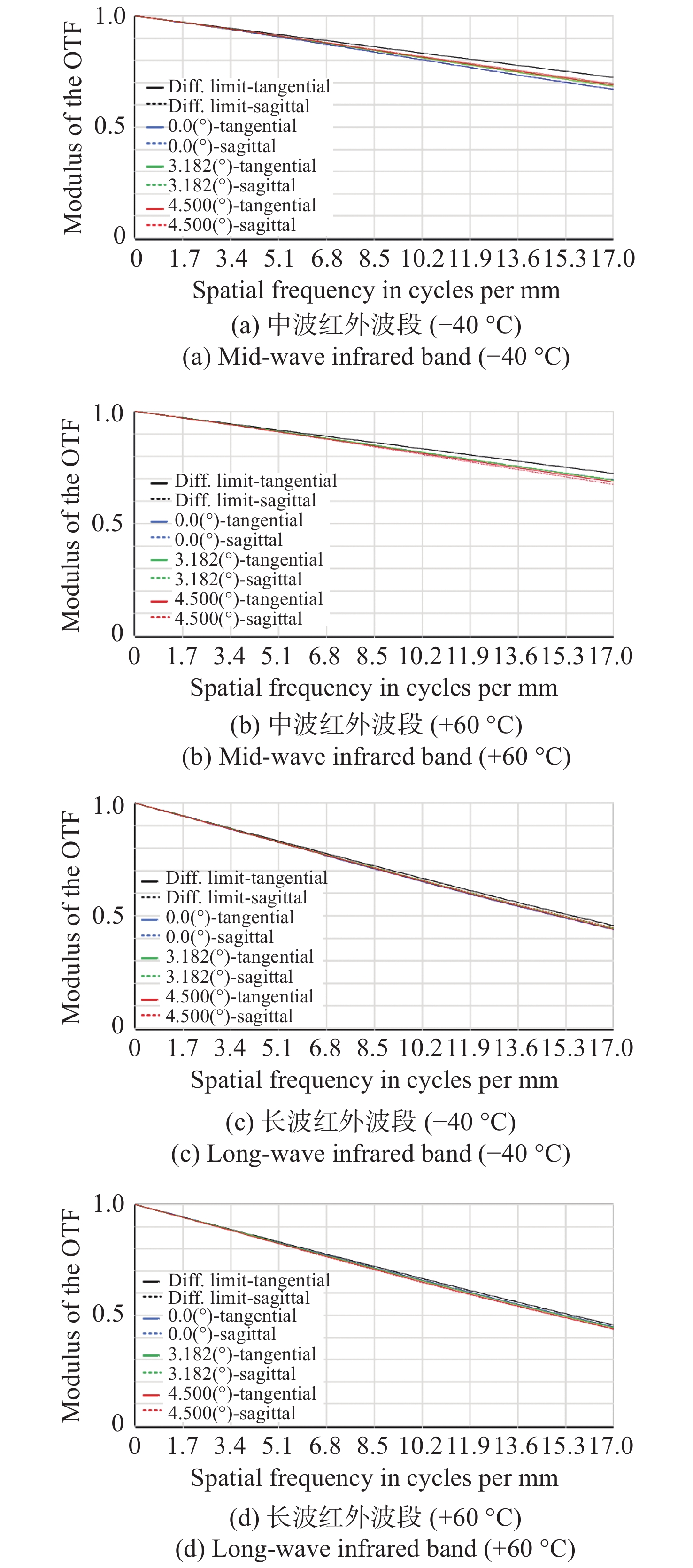
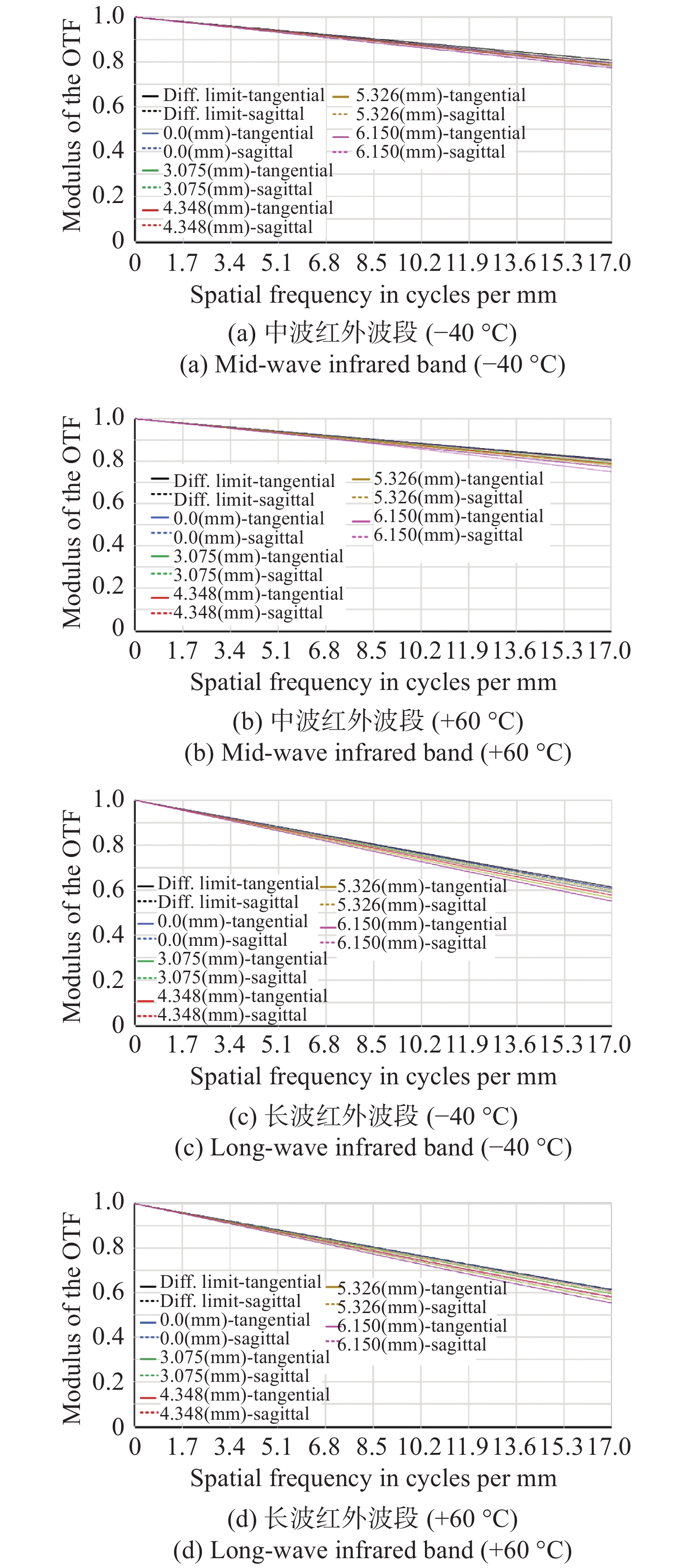
图 16 中继转像系统不同波段高低温下的MTF曲线
Figure 16. MTF of relay system at different bands at high and low temperatures
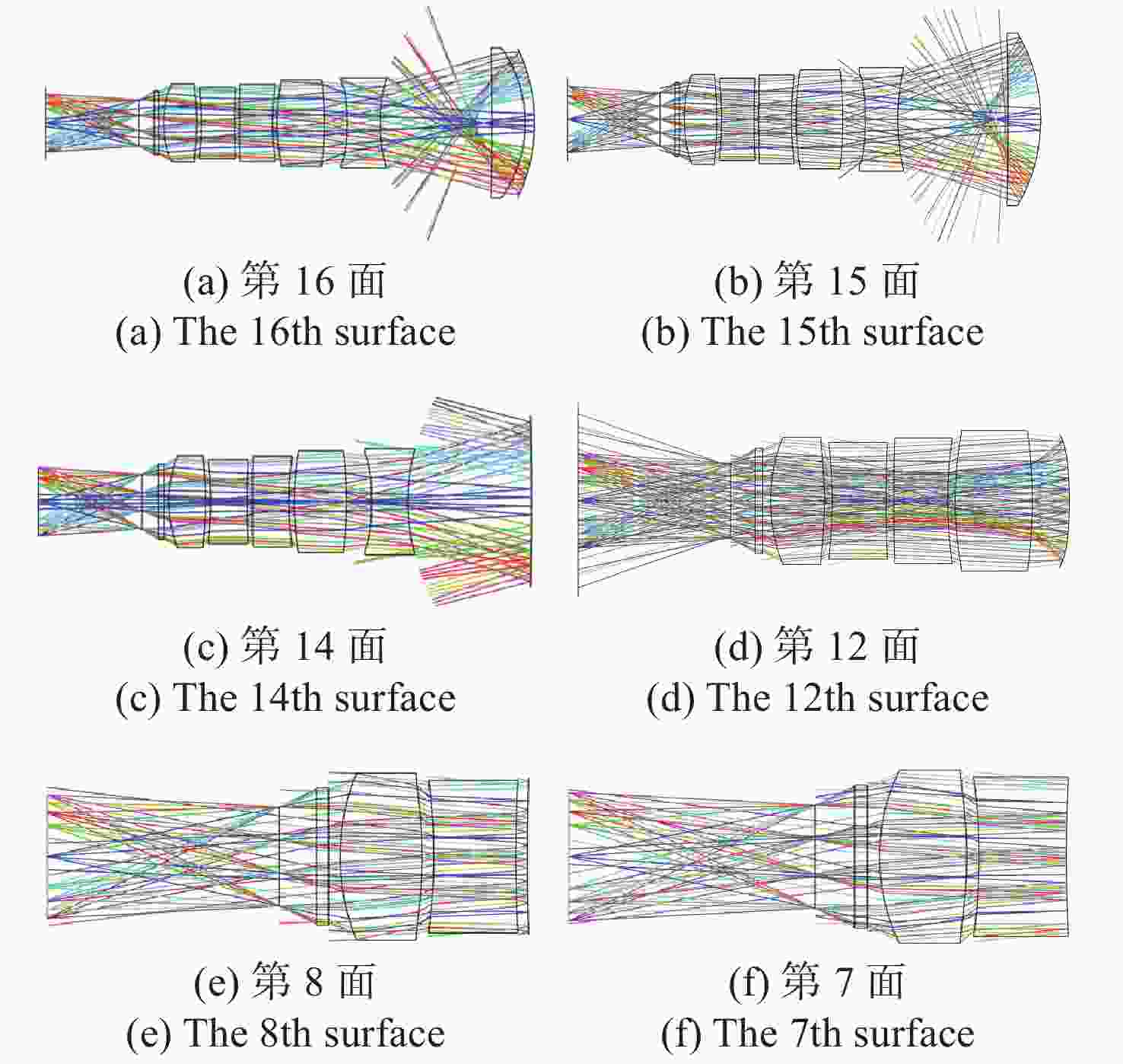
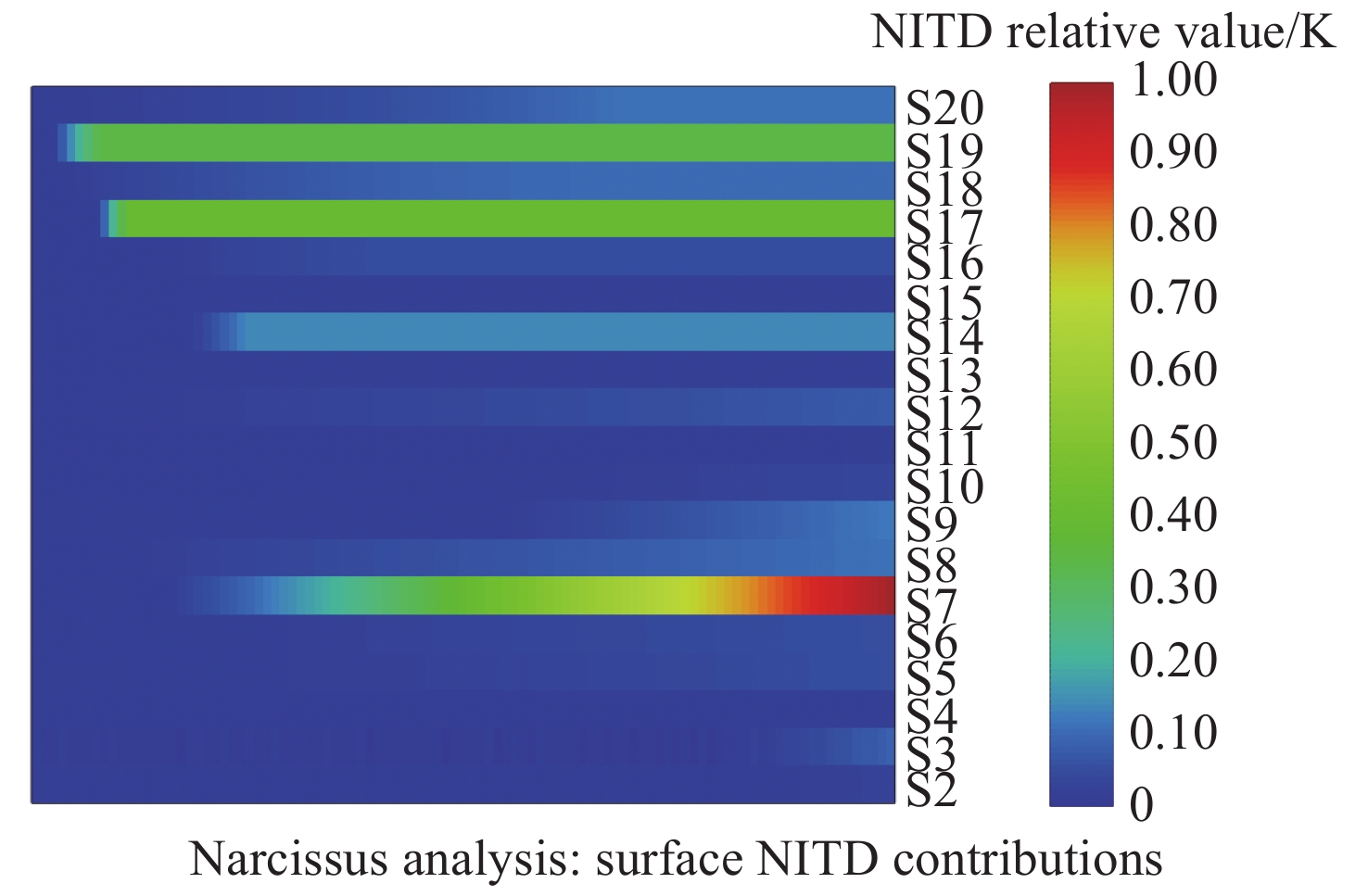
图 17 中继系统部分表面反射光线反向追迹图
Figure 17. Reverse tracing diagram of reflected light on part surface of relay system
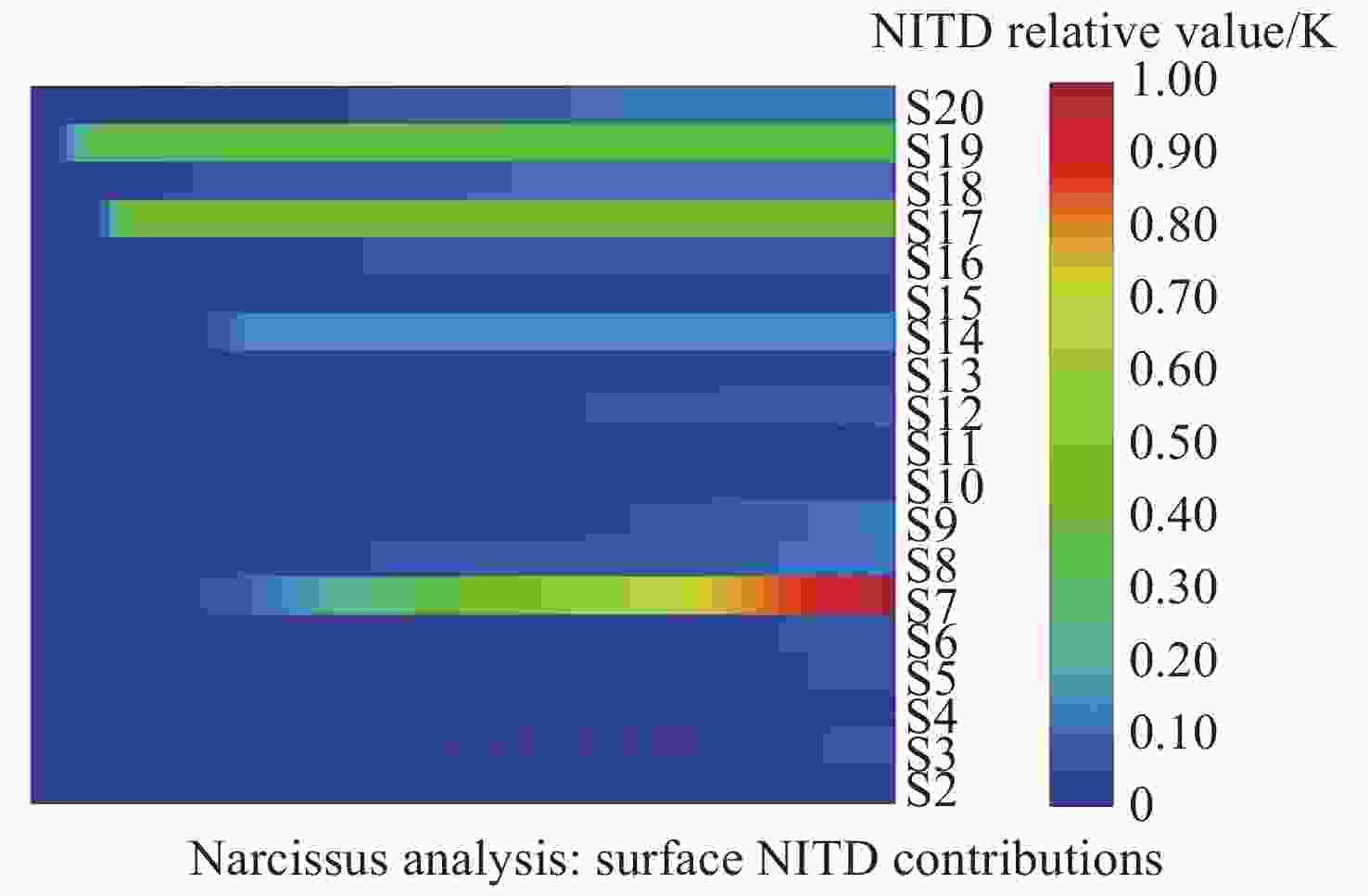
图 18 中继系统各光学表面NITD贡献值
Figure 18. NITD contributions of optical surfaces of relay system
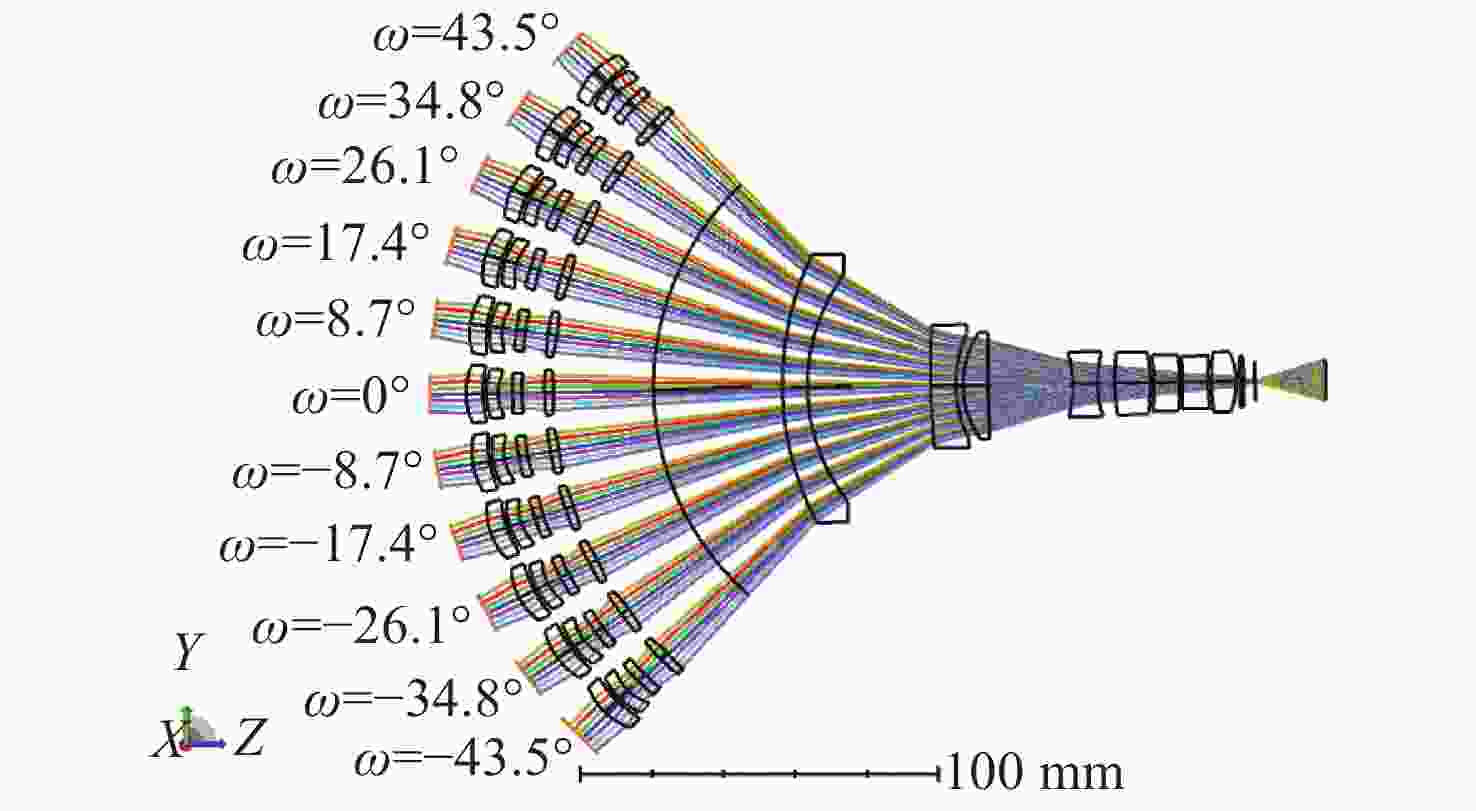
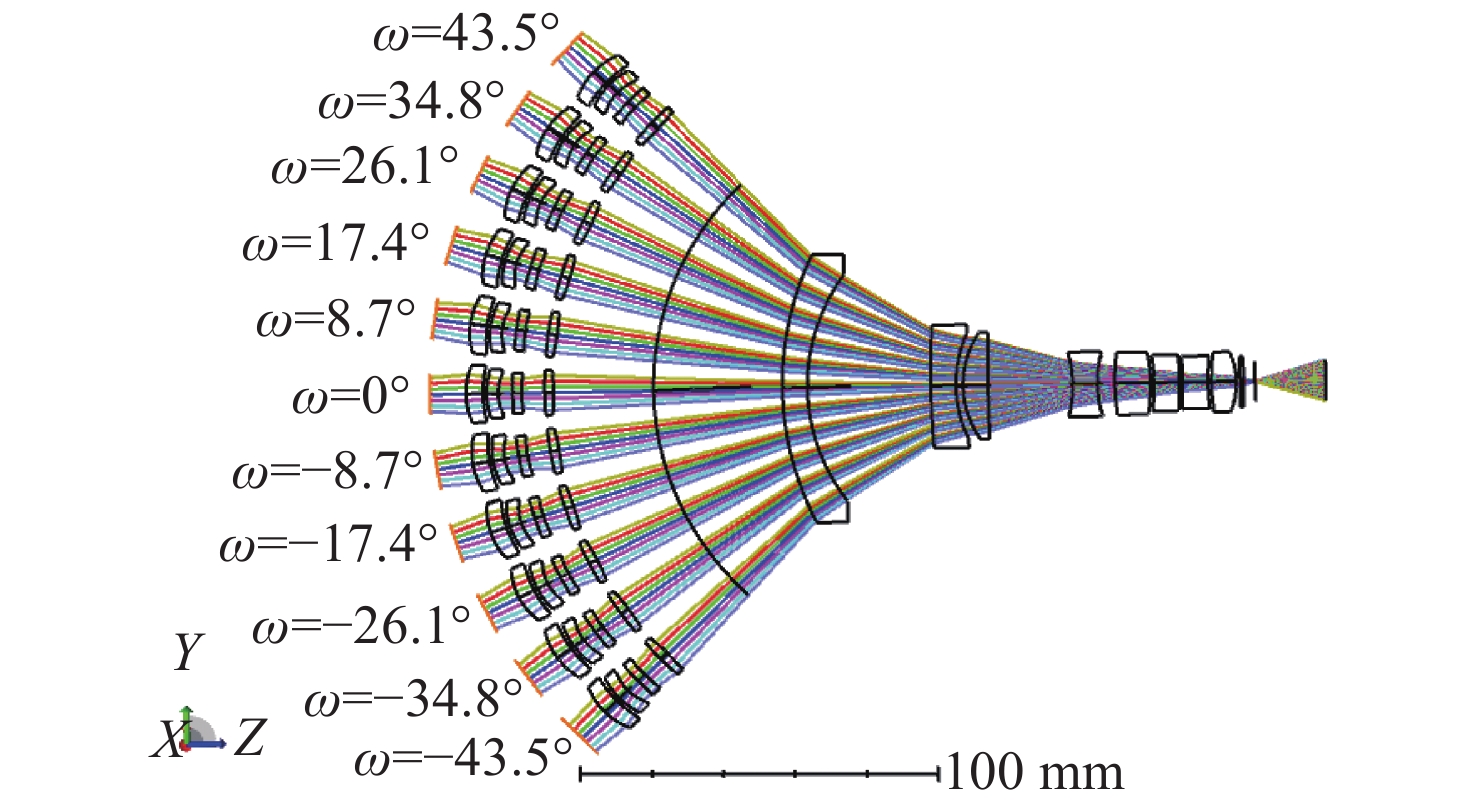
图 19 复眼光学系统主阵列方向成像光路图
Figure 19. Imaging optical path diagram of the main array direction of the compound eye optical system
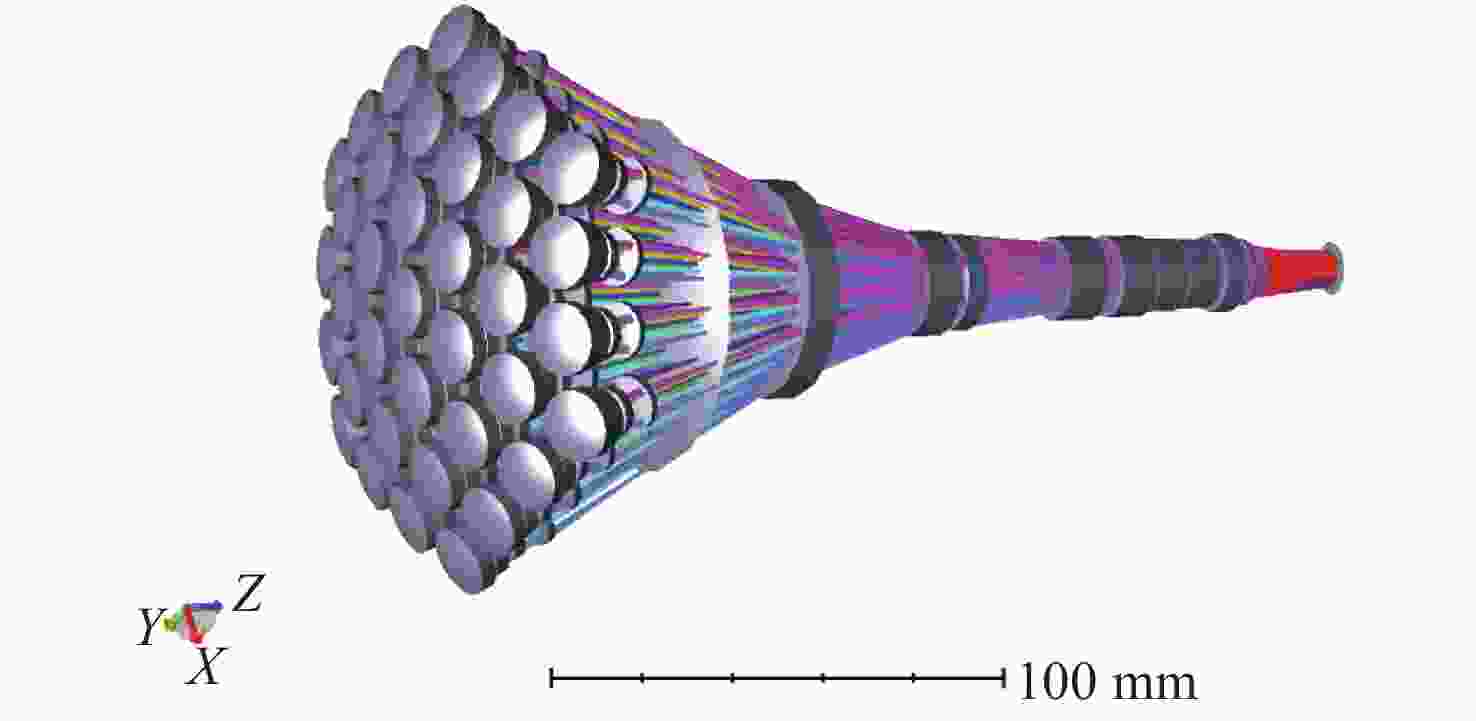
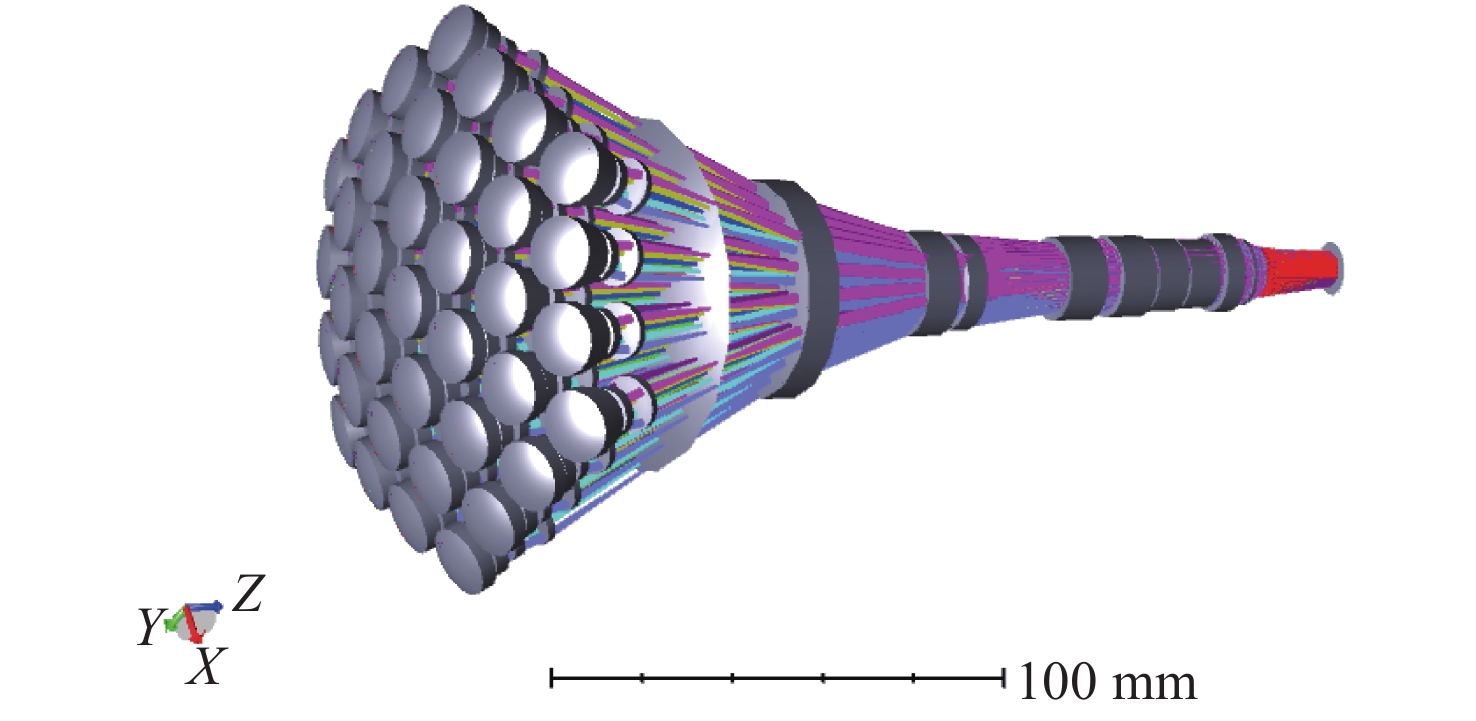
图 20 复眼光学系统整体成像光路图
Figure 20. Overall imaging optical path diagram of compound eye optical system
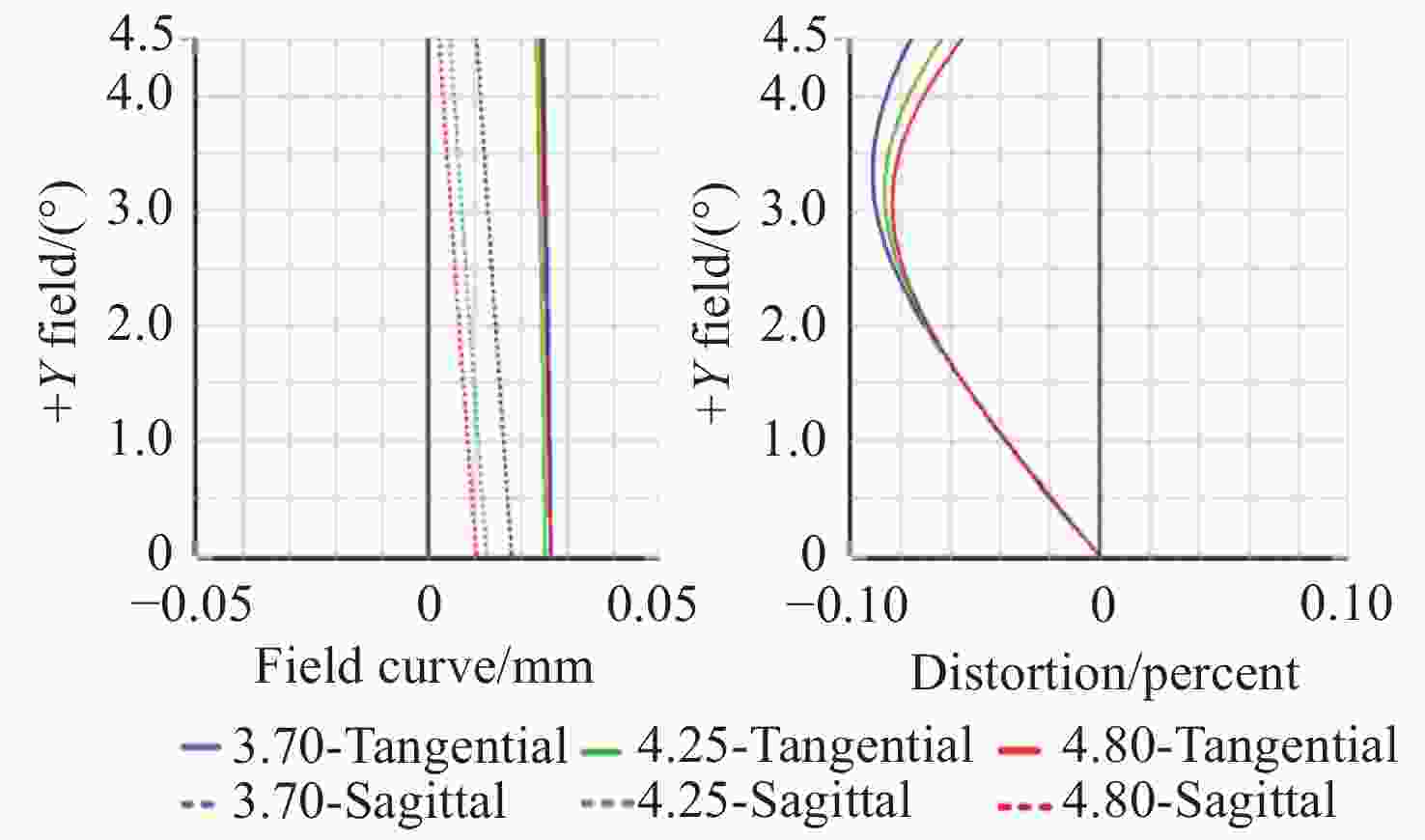
图 23 复眼系统边缘子通道的场曲和畸变图
Figure 23. Field curve and distortion plot of the margin sub channel of the compound eye system
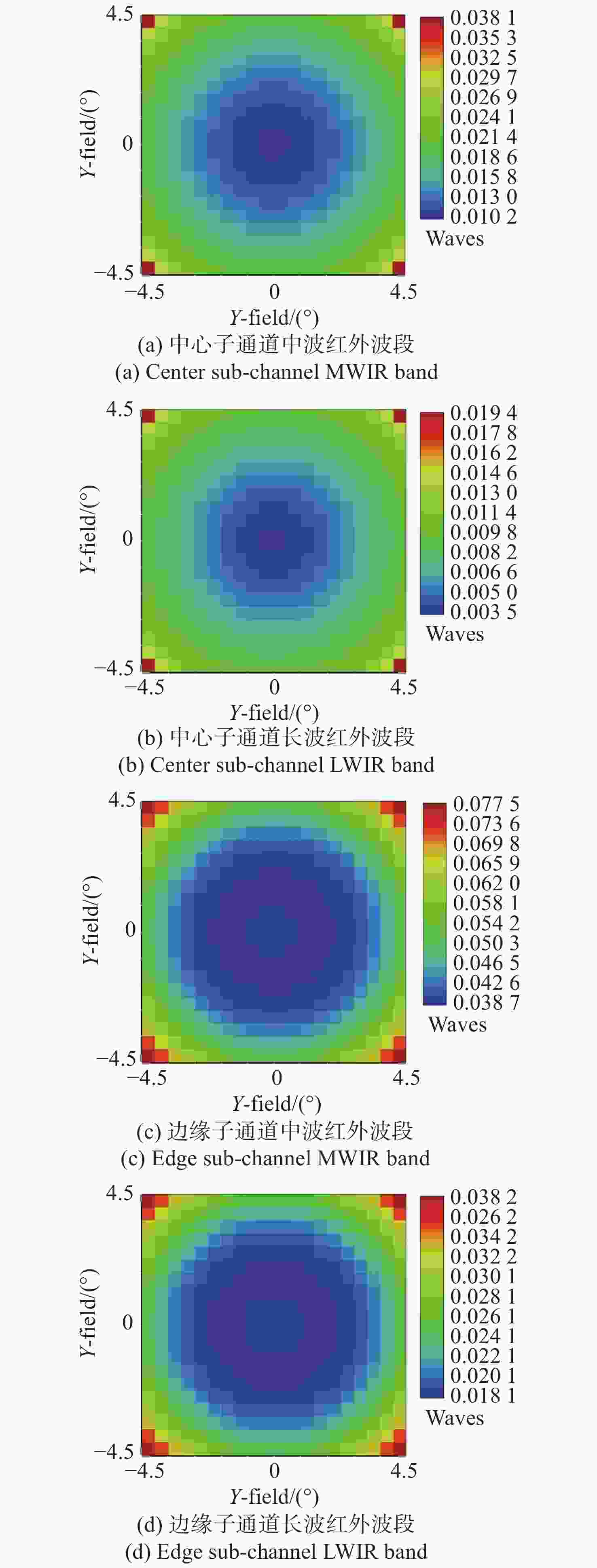
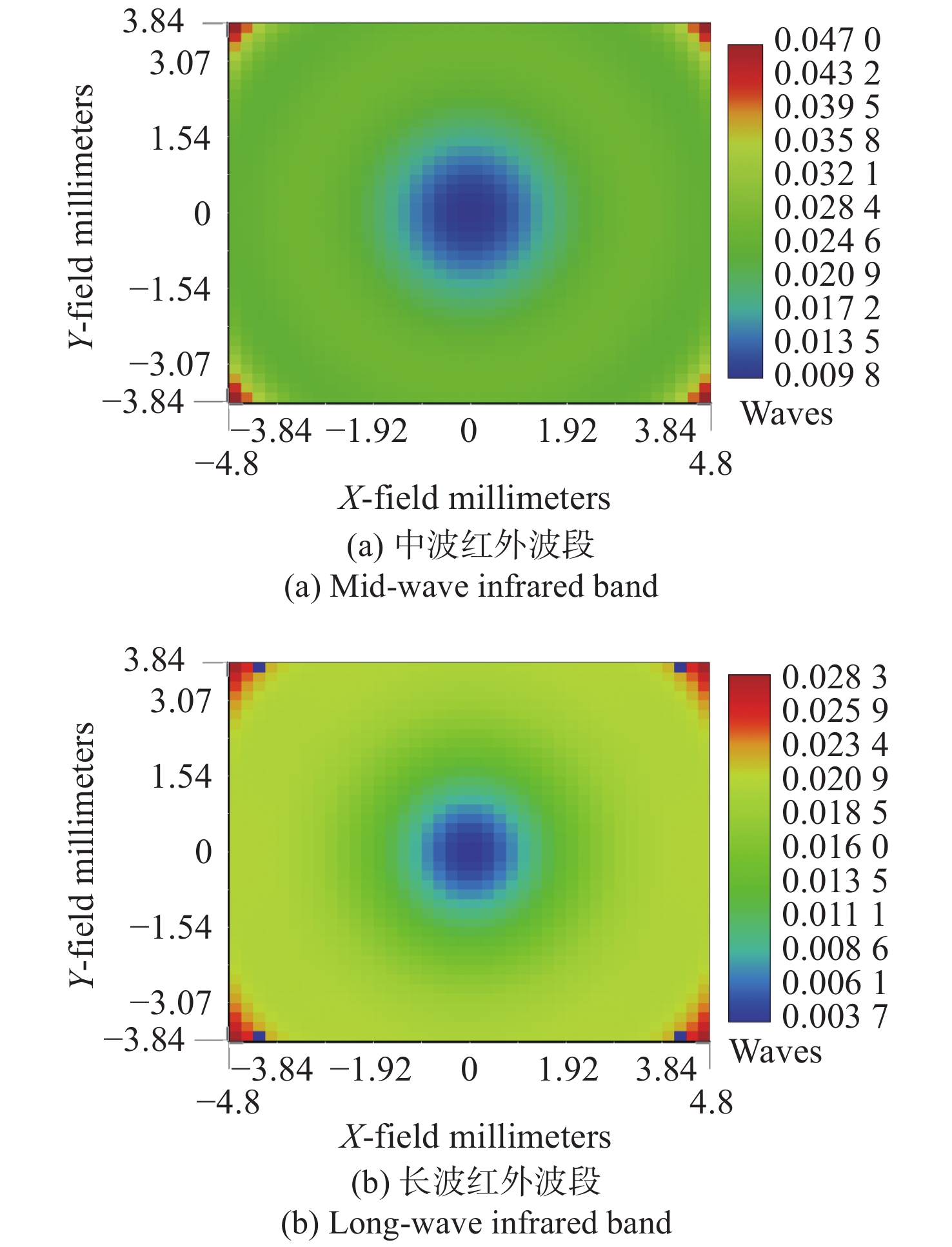
图 24 复眼组合系统中心和边缘子通道RMS视场波前图
Figure 24. RMS field of view wavefront diagram of center and edge sub-channels of compound eye combined system
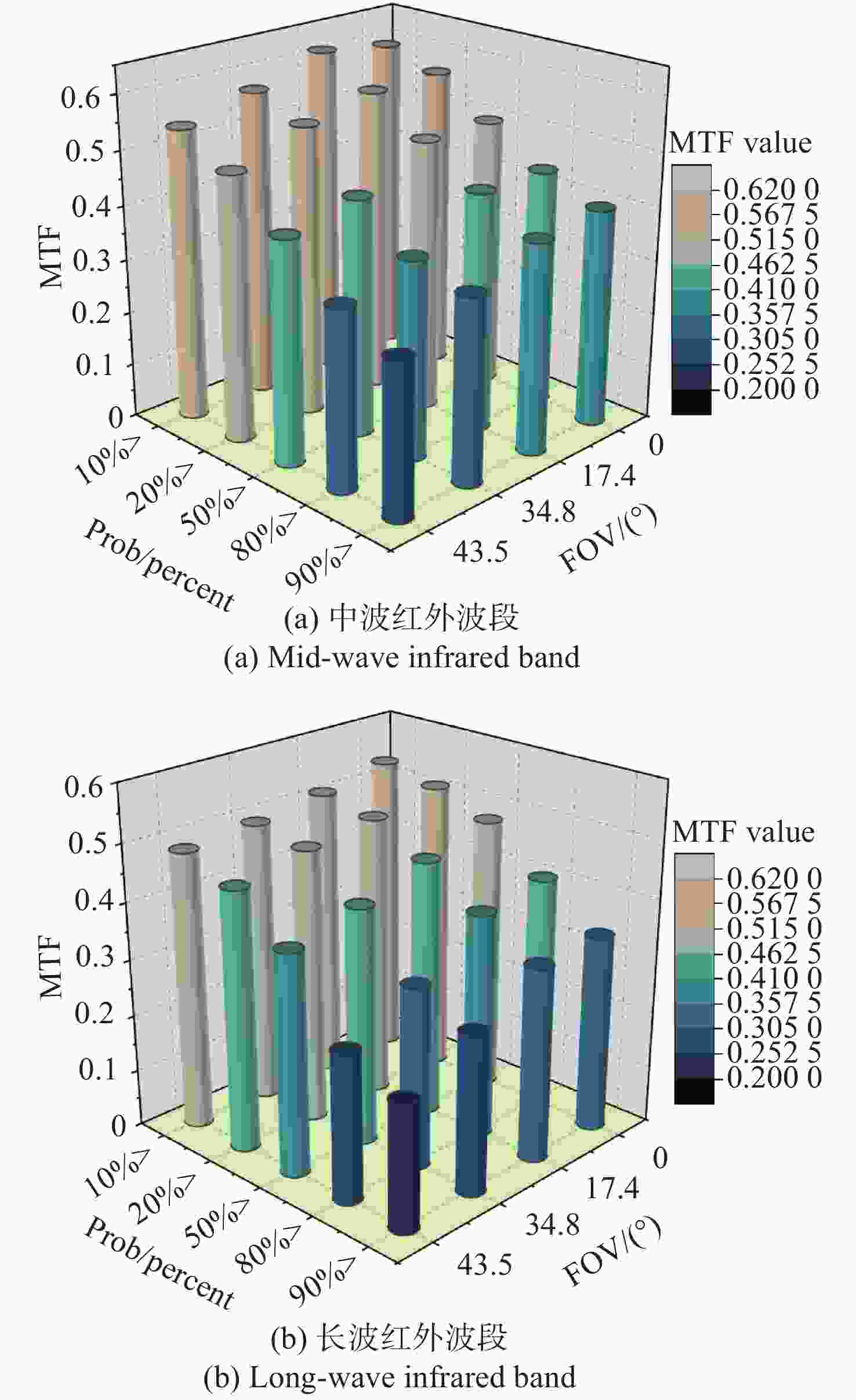
图 25 复眼系统300组MC公差分析结果
Figure 25. Results of 300 Monte Carlo tolerance analysis for compound eye system
表 1 相邻子孔径重叠角与子孔径视场角关系
Table 1. Relationship between overlapping angle of adjacent sub aperture and FOV of sub aperture
Angle relationship Conclusion β=0° The edge rays of adjacent sub-apertures are parallel, and there is a blind spot in the field of view at the object plane at finite distance 0°<β<ω Adjacent sub-aperture edge rays intersect β=ω Sub-aperture edge rays are parallel to adjacent sub-aperture optical axes β>ω Alternate sub-aperture edge rays overlap far away, and the intermediate sub-aperture field of view is meaningless  下载: 导出CSV
下载: 导出CSV
表 2 仿生复眼光学系统基本参数
Table 2. Basic parameters of bionic compound eye optical system
Type The parameter value Main array direction FOV 2θ/(°) 96 sub-aperture FOV 2ω/(°) 9.0 The angle between the optical axes of
adjacent sub-apertures Δφ/(°)8.7 Base radius R/mm 111 Number of sub-apertures n 91 Number of sub-aperture array layers S 6
下载: 导出CSV
表 3 六边形环带复眼系统总体设计指标
Table 3. Overall design index of compound eye system with hexagonal ring band
Type The parameter value Detection distance/km 1 Target size/m 2 System diameter/mm <200 Wavelength/μm MWIR: 3.7~4.8 LWIR: 7.7~9.5
下载: 导出CSV
表 4 红外双色探测器主要参数
Table 4. Main parameters of infrared two-color detector
Type The parameter value Resolution 320×256 cell size/μm 30×30 target size/mm 12.29
下载: 导出CSV
表 5 子孔径光学系统设计参数
Table 5. Sub-aperture optical system design parameters
MWIR LWIR Wavelength/μm 3.7~4.8 7.7~9.5 Focal length/mm 48 48 F# 3 3 Field of view/(°) 9 9
下载: 导出CSV
表 6 中继转像系统光学设计参数
Table 6. Optical system design parameters of relay system
MWIR LWIR Wavelength/μm 3.7~4.8 7.7~9.5 Focal length/mm 6 6 Detector size/mm 12.29 12.29 Field of view/(°) $ \geqslant $92 $ \geqslant $92
下载: 导出CSV
表 7 子孔径系统不同波段温度下的焦距值
Table 7. Focal length values of sub aperture systems at different band temperatures
Temperature/°C MWIR/mm LWIR/mm −40 47.9395 48.0351 +20 47.9392 48.0347 +60 47.9391 48.0346
下载: 导出CSV
表 8 中继转像系统不同波段温度下的焦距值
Table 8. Focal length values of relay systems at different band temperatures
Temperature/°C MWIR/mm LWIR/mm −40 6.1532 6.1422 +20 6.1426 6.1320 +60 6.1351 6.1252
下载: 导出CSV
表 9 中继转像系统所有表面YNI和I/IBAR数值
Table 9. YNI and I/IBAR values on all surfaces of relay system
Surface YNI I/IBAR Surface YNI I/IBAR 1 1.227 3.165 9 1.265 0.525 2 1.425 0.810 10 1.389 0.527 3 1.441 0.814 11 −1.174 3.822 4 3.089 1.465 12 −0.973 16.673 5 −2.574 4.499 13 −1.231 0.089 6 −2.205 4.156 14 −0.166 0.243 7 0.267 0.137 15 −0.360 1.058 8 0.168 0.073 16 −0.282 0.414
下载: 导出CSV
表 10 复眼系统公差分配表
Table 10. Tolerance assignment table for compound eye system
Parameters Specification Radius/fringes ±2 Thickness/mm ±0.02 Surface XY decenter/mm ±0.01 Surface XY tilt/(°) ±0.02 Element XY decenter/mm ±0.01 Element XY tilt/(°) ±0.02 Abbe number 0.5% Index 0.001 Zernike irregularity/fringes 0.1
下载: 导出CSV
-
[1] CAO A X, WANG J ZH, HUI P, et al. Design and fabrication of a multifocal bionic compound eye for imaging[J]. Bioinspiration &Biomimetics, 2018, 13(2): 026012. [2] 巩宪伟, 鱼卫星, 张红鑫, 等. 仿生复眼成像系统设计与制作的研究进展[J]. 中国光学,2013,6(1):34-45.GONG X W, YU W X, ZHANG H X, et al. Progress in design and fabrication of artificial compound eye optical systems[J]. Chinese Optics, 2013, 6(1): 34-45. (in Chinese) [3] LAW N M, FORS O, WULFKEN P, et al. The Evryscope: the first full-sky gigapixel-scale telescope[J]. Proceedings of SPIE, 2014, 9145: 91450Z. [4] 付跃刚, 赵宇, 刘智颖, 等. 基于视场拼接方法的仿生复眼光学系统设计[J]. 仪器仪表学报,2015,36(2):422-429. doi: 10.19650/j.cnki.cjsi.2015.02.022FU Y G, ZHAO Y, LIU ZH Y, et al. Design of the bionic compound eye optical system based on field splicing method[J]. Chinese Journal of Scientific Instrument, 2015, 36(2): 422-429. (in Chinese) doi: 10.19650/j.cnki.cjsi.2015.02.022 [5] 田钰麒. 长波红外与可见光双波段复眼光学系统研究[D]. 长春: 长春理工大学, 2018: 18-27.TIAN Y Q. Research on dual-band compound eye optical system with LWIR and VIS[D]. Changchun: Changchun University of Science and Technology, 2018: 18-27. (in Chinese) [6] 王元元. 曲面仿生复眼成像系统设计及微加工技术研究[D]. 长春: 中国科学院大学(中国科学院长春光学精密机械与物理研究所), 2019: 35-69.WANG Y Y. Design and micromachining technology of surface bionic compound eye imaging system[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2019: 35-69. (in Chinese) [7] 许黄蓉, 刘晋亨, 张远杰, 等. 无人机载型曲面仿生复眼成像测速系统[J]. 光子学报,2021,50(9):0911004. doi: 10.3788/gzxb20215009.0911004XU H R, LIU J H, ZHANG Y J, et al. UAV-borne biomimetic curved compound-eye imaging system for velocity measurement[J]. Acta Photonica Sinica, 2021, 50(9): 0911004. (in Chinese) doi: 10.3788/gzxb20215009.0911004 [8] 于晓丹, 张远杰, 王元元, 等. 小型无人机载大视场复眼相机光学系统设计[J]. 光子学报,2019,48(7):0722003. doi: 10.3788/gzxb20194807.0722003YU X D, ZHANG Y J, WANG Y Y, et al. Optical design of a compound eye camera with a large-field of view for unmanned aerial vehicles[J]. Acta Photonica Sinica, 2019, 48(7): 0722003. (in Chinese) doi: 10.3788/gzxb20194807.0722003 [9] 胡雪蕾, 高明, 陈阳. 大视场曲面仿生复眼光学系统设计[J]. 红外与激光工程,2020,49(1):0114002.HU X L, GAO M, CHEN Y, et al. Design of curved bionic compound eye optical system with large field of view[J]. Infrared and Laser Engineering, 2020, 49(1): 0114002. (in Chinese) [10] 虞林瑶, 魏群, 张天翼, 等. 中波红外长焦距折反光学系统设计[J]. 中国光学,2015,8(2):234-240. doi: 10.3788/co.20150802.0234YU L Y, WEI Q, ZHANG T Y, et al. Design of long focal infrared catadioptric optical system for multi-guided system[J]. Chinese Optics, 2015, 8(2): 234-240. (in Chinese) doi: 10.3788/co.20150802.0234 [11] CHEN Y, GAO M, HU X L, et al. Design of co-aperture wide spectrum compound eye optical system[J]. Acta Photonica Sinica, 2020, 49(3): 0322002. doi: 10.3788/gzxb20204903.0322002 [12] 徐睆垚, 徐亮, 沈先春, 等. 基于红外多光谱相机分析长后焦距对无热化设计的影响[J]. 物理学报,2021,70(18):184201. doi: 10.7498/aps.70.20210217XU H Y, XU L, SHEN X CH, et al. Analysis of influence of long back focal length on athermal design based on infrared multispectral camera[J]. Acta Physica Sinica, 2021, 70(18): 184201. (in Chinese) doi: 10.7498/aps.70.20210217 [13] 陈潇. 大相对孔径变焦红外光学系统无热化设计[J]. 红外技术,2021,43(12):1183-1187.CHEN X. Athermalization of infrared zoom optical system with large relative aperture[J]. Infrared Technology, 2021, 43(12): 1183-1187. (in Chinese) [14] 单秋莎, 谢梅林, 刘朝晖, 等. 制冷型长波红外光学系统设计[J]. 中国光学,2022,15(1):72-78.SHAN Q SH, XIE M L, LIU ZH H, et al. Design of cooled long-wavelength infrared imaging optical system[J]. Chinese Optics, 2022, 15(1): 72-78. (in Chinese) [15] 李晓蕾, 高明. 小型化复合孔径双波段观瞄系统设计[J]. 红外与激光工程,2022,51(4):20210549.LI X L, GAO M. Design of miniaturized dual-band observation system with composite aperture[J]. Infrared and Laser Engineering, 2022, 51(4): 20210549. (in Chinese) -

 下载:
下载:












计量
- 文章访问数: 1755
- HTML全文浏览量: 703
- PDF下载量: 362
- 被引次数: 0
