


Three-dimensional surface shape reconstruction of fiber bragg gratings in a ring arrangement
-
摘要:
为了提高柔性机器人抓握传感中掌心表面的重构精度,本文基于COMSOL仿真,在436 mm×436 mm×2 mm聚丙烯板上,采用7只经聚二甲基硅氧烷(PDMS)封装的光纤光栅(FBG)柔性传感器,选取环形布设的方式,在板末端中心与两角分别受力的情况下,使用光纤光栅解调仪采集实验中的传感器数据,并通过三次样条插值法进行连续化。设定数个平面
Y 与拟合圆环相交,计算过点函数获得三维曲面点集,实现了空间曲面的拟合可视化显示。在曲面末端中心受力时,板末端位移最小相对误差为0.549%,最大相对误差为8.300%,最小绝对误差为0.051 cm,最大绝对误差为1.255 cm,板末端两角受力时,板面重构末端位移最小相对误差为2.546%,最大相对误差为14.289%,最小绝对误差为0.005 cm,最大绝对误差为0.729 cm。实验结果为柔性机器人掌心抓握传感提供了应用基础。Abstract:To improve the accuracy of palm surface reconstruction in flexible robot grasp sensing, we conduct a COMSOL simulation to select a ring arrangement comprising of 7 fiber Bragg grating (FBG) flexible sensors packaged with polydimethylsiloxane (PDMS) on a 436 mm×436 mm×2 mm polypropylene plate. Assuming that the center and two corner ends of the plate were subjected to stress, respectively, we collected sensor data using a fiber grating demodulation instrument during the experiment. The data was continuously interpolated using cubic spline interpolation. Several planes
Y intersected with the fitting ring which created a three-dimensional surface. We calculated the point function to obtain the point set and achieve a fitting visual display of the spatial surface. When the center of the end of the surface is under stress, the plate experienced a minimum relative error of 0.549% in end displacement, with a maximum relative error of 8.300%, the minimum absolute error of 0.051 cm, and a maximum absolute error of 1.255 cm. When both corners at the end of the plate are under stress, for the end displacement of the plate reconstruction, the minimum relative error is 2.546%, and a maximum relative error is 14.289%, the minimum absolute error is 0.005 cm, and the maximum absolute error is 0.729 cm. These experimental results provide a foundation to implement palm grip sensing in flexible robots.-
Key words:
- curvature interpolation /
- surface fitting /
- FBG /
- ring arrangement /
- curvature calibration
-

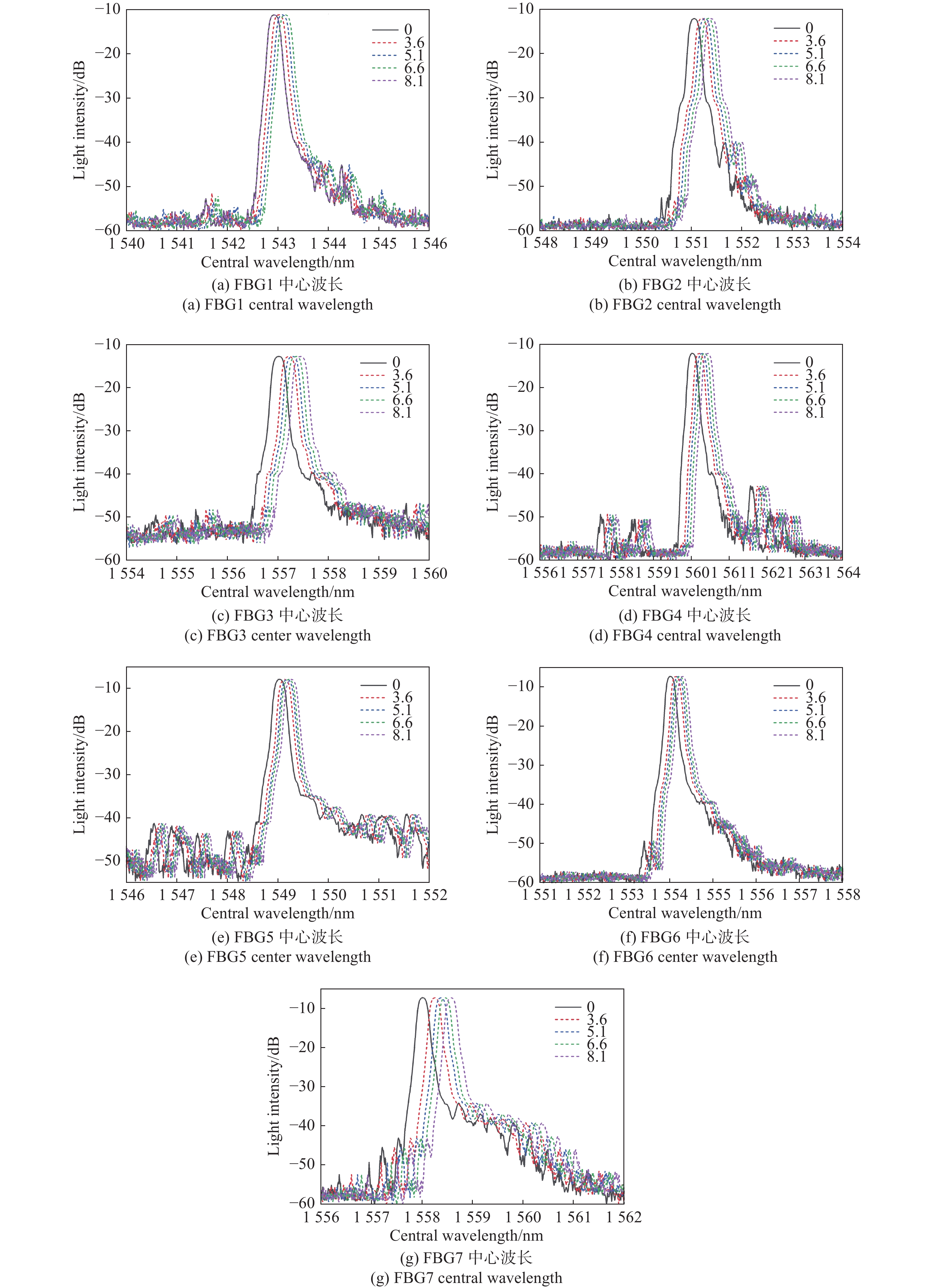
图 3 传感器1~7在不同曲率下的中心波长偏移量
Figure 3. Center wavelength offsets of sensors 1~7 under different curvatures

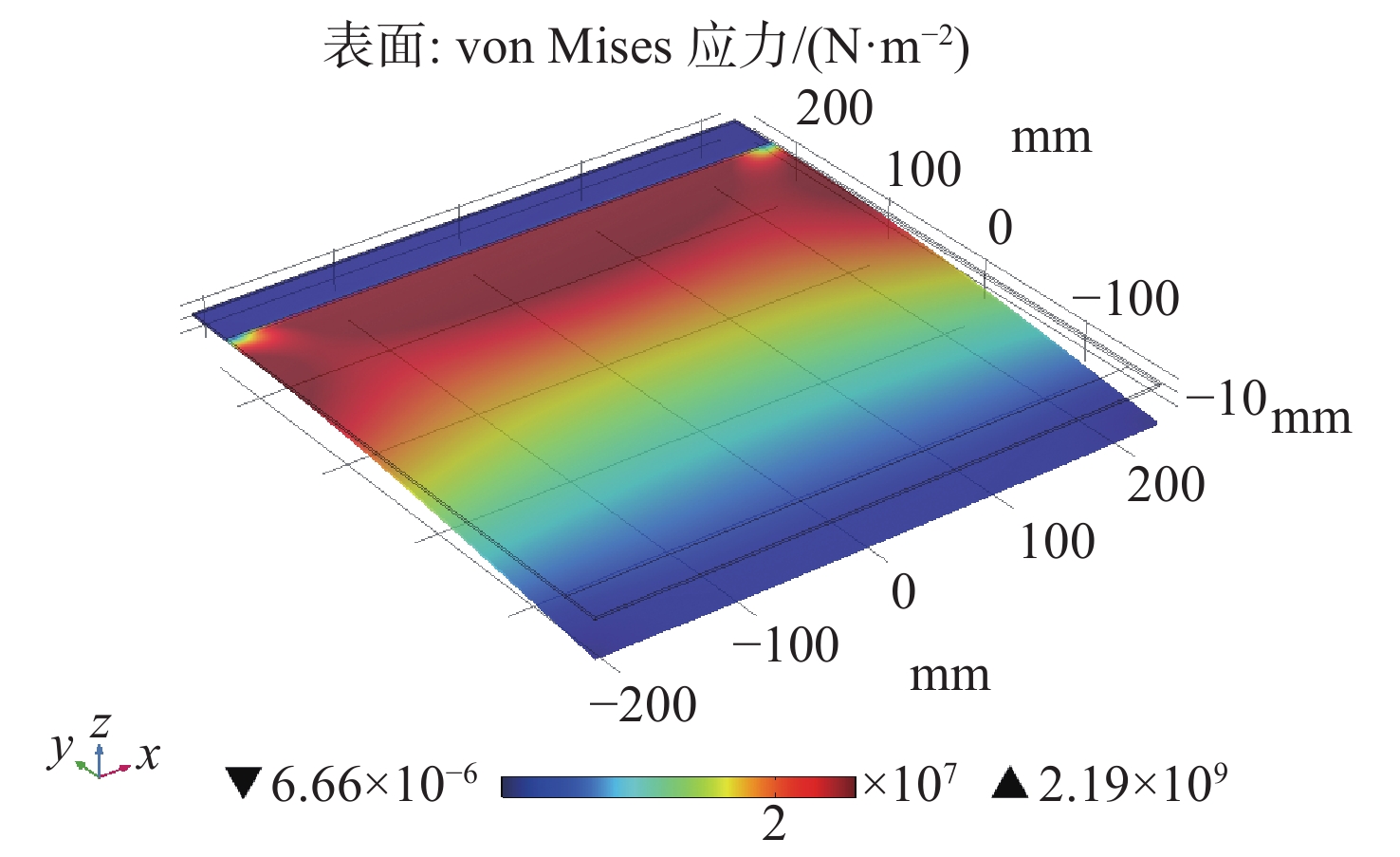
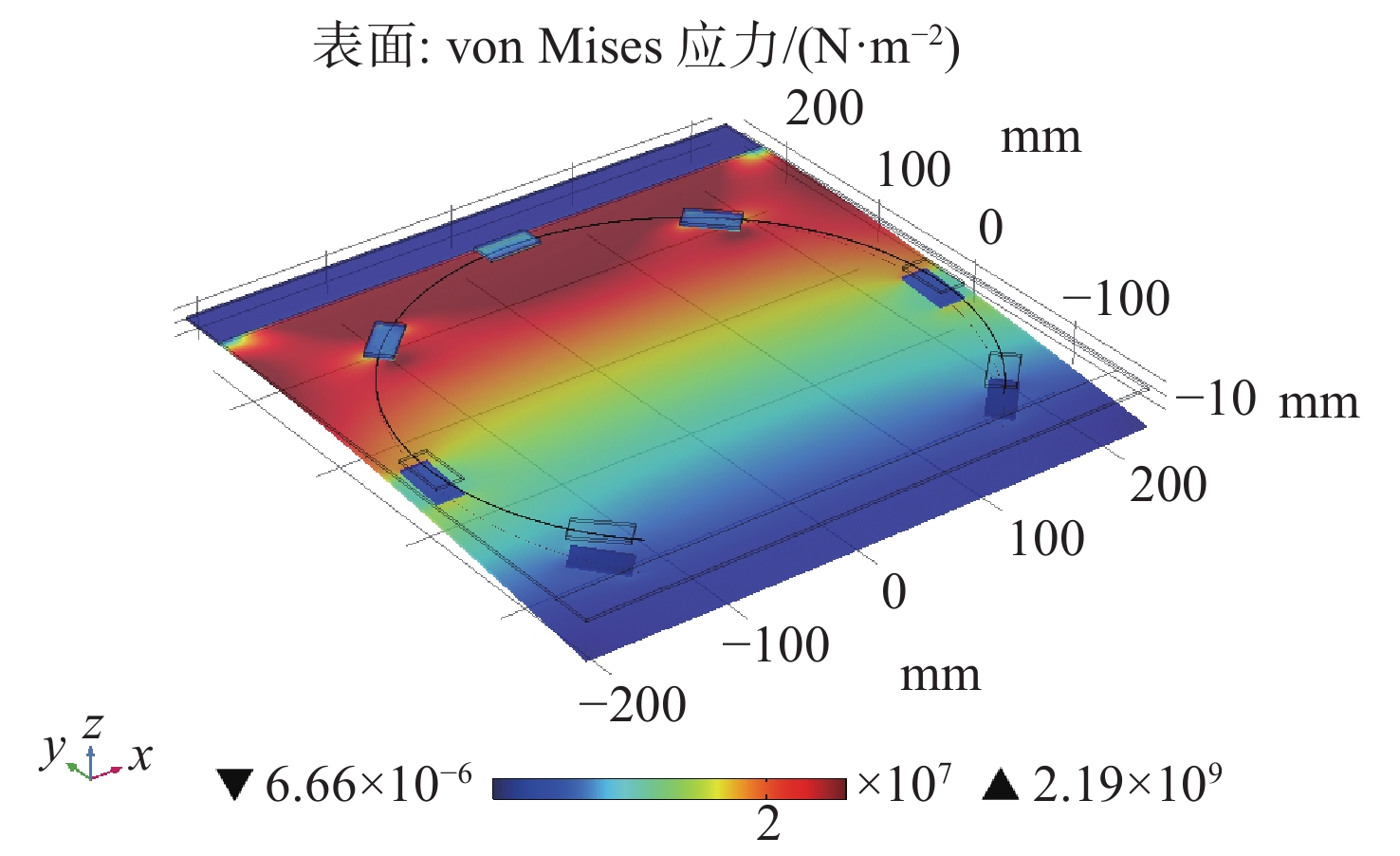
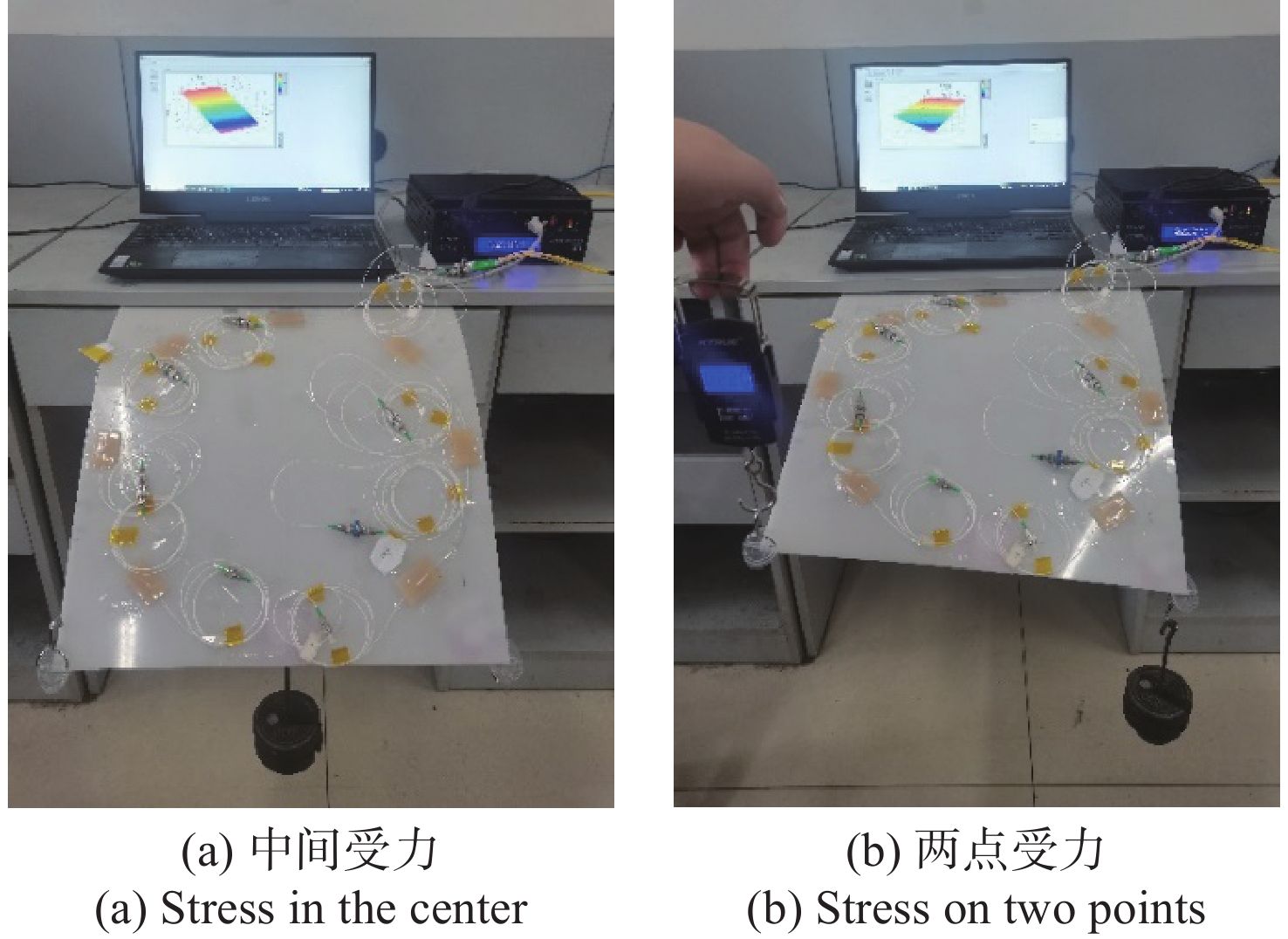
图 6 实验平台受力弯曲时的受力分布图
Figure 6. Force distribution diagram of bending experimental platform

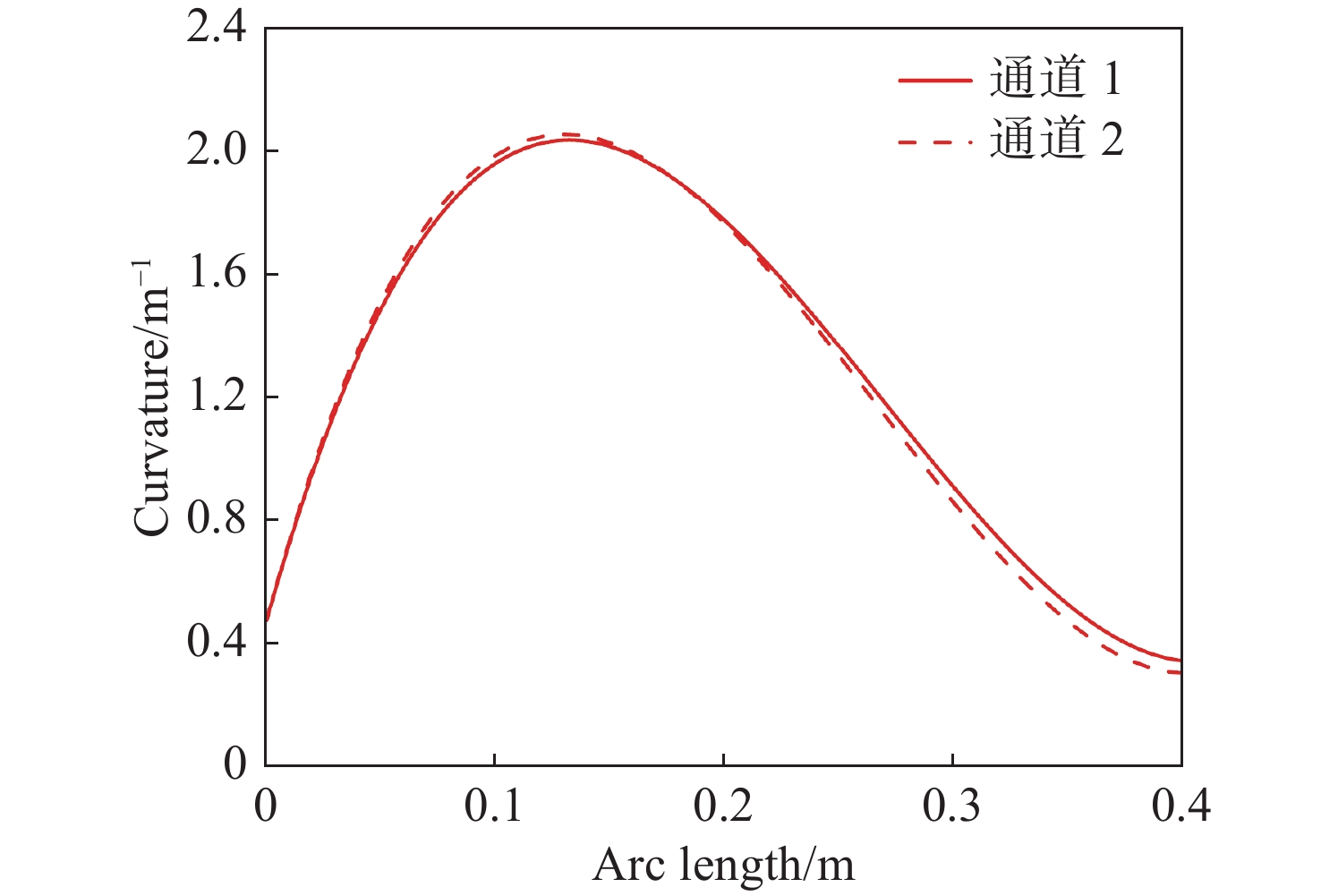
图 9 板末端中心加载1200 g负载时的曲率随弧长的变化情况
Figure 9. Curvature change with arc length when 1200 g load is applied to the center of plate end

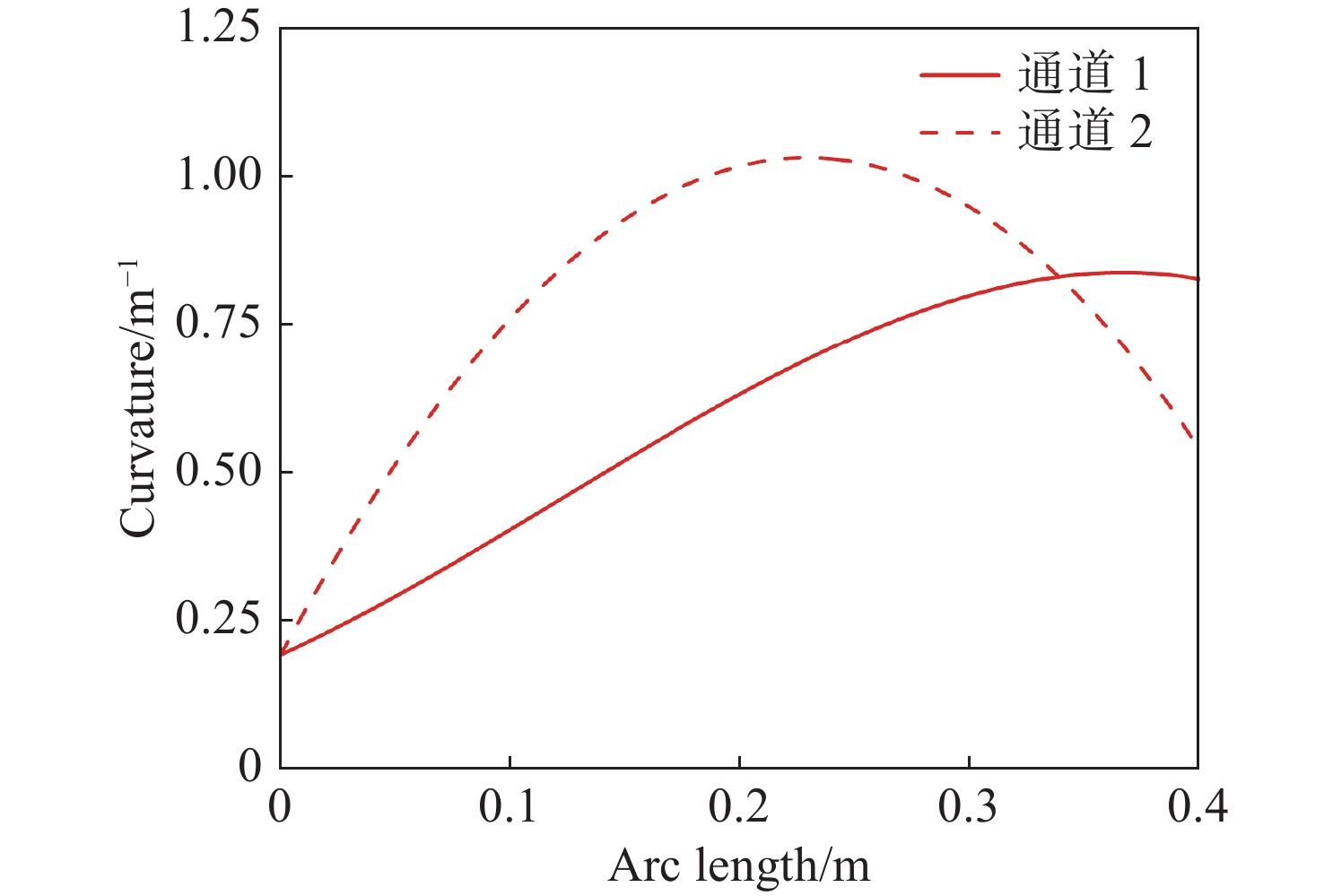
图 10 末端左角加载450 g负载(虚线),右角加载800 g负载(实线)时曲率随弧长的变化情况
Figure 10. Curvature changes with arc length when the left corner of the end is loaded 450 g (dotted line) and right cornor is loaded 800 g (solid line)

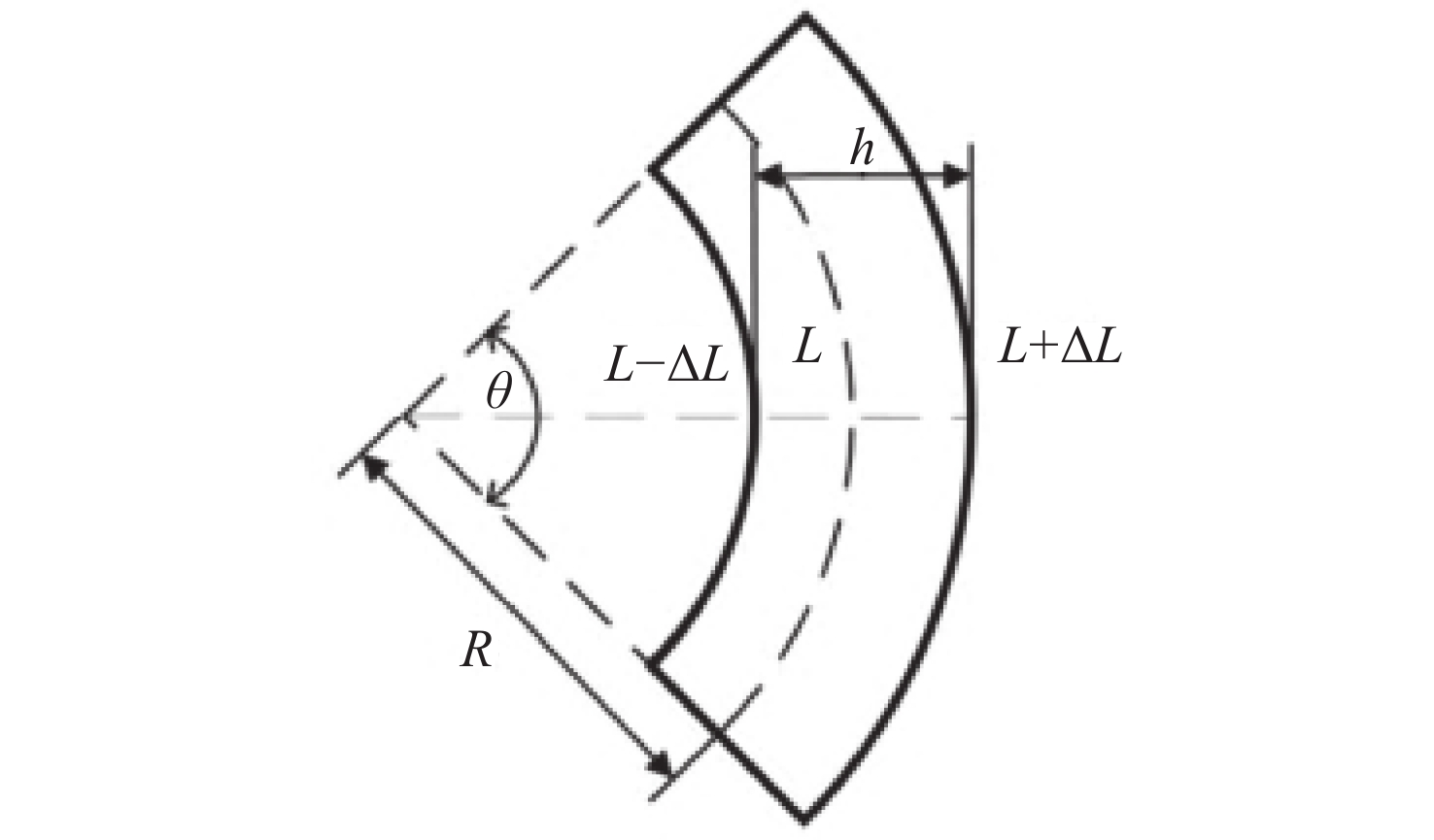
图 11 曲线形状重构原理
Figure 11. Schematic diagram of the principle of curve shape reconstruction

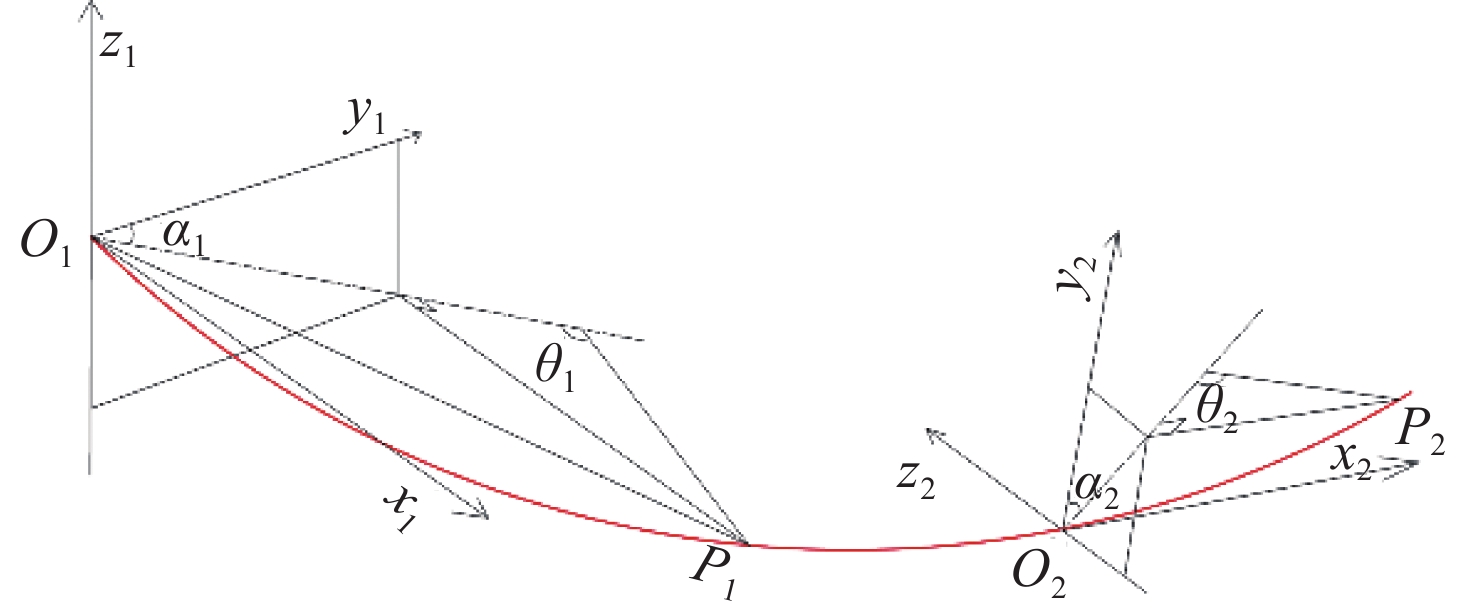
图 12 曲面重构原理
Figure 12. Schematic diagram of the principle of curve surface reconstruction

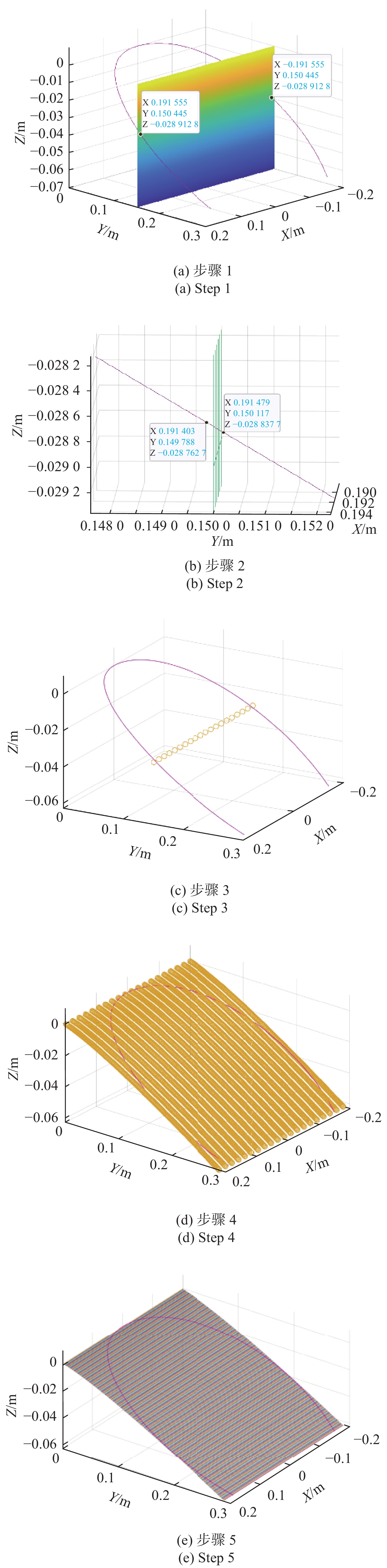
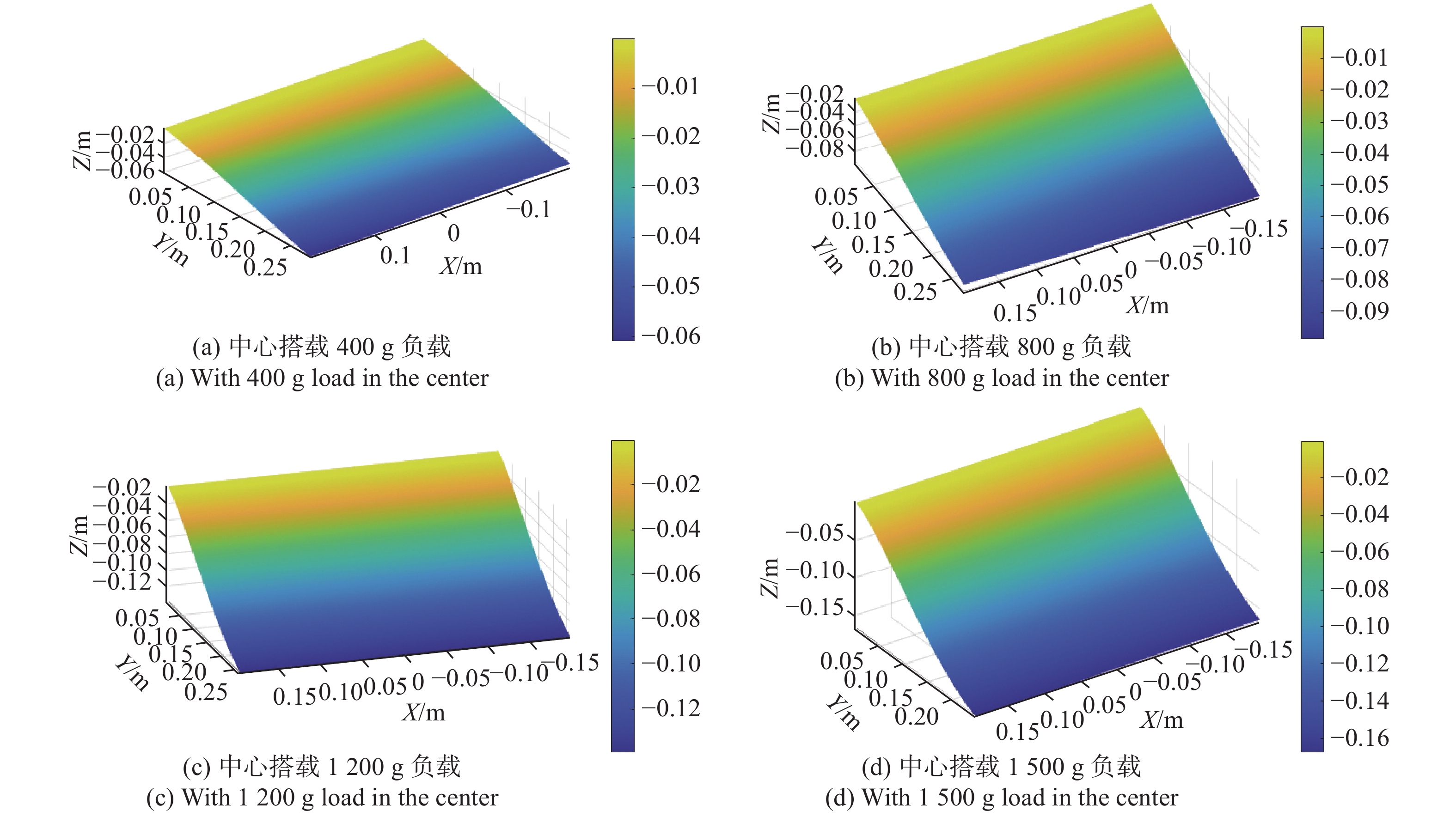
图 15 不同负载三维曲面重构拟合
Figure 15. Reconstruction and fitting of 3D surfaces under different stresses

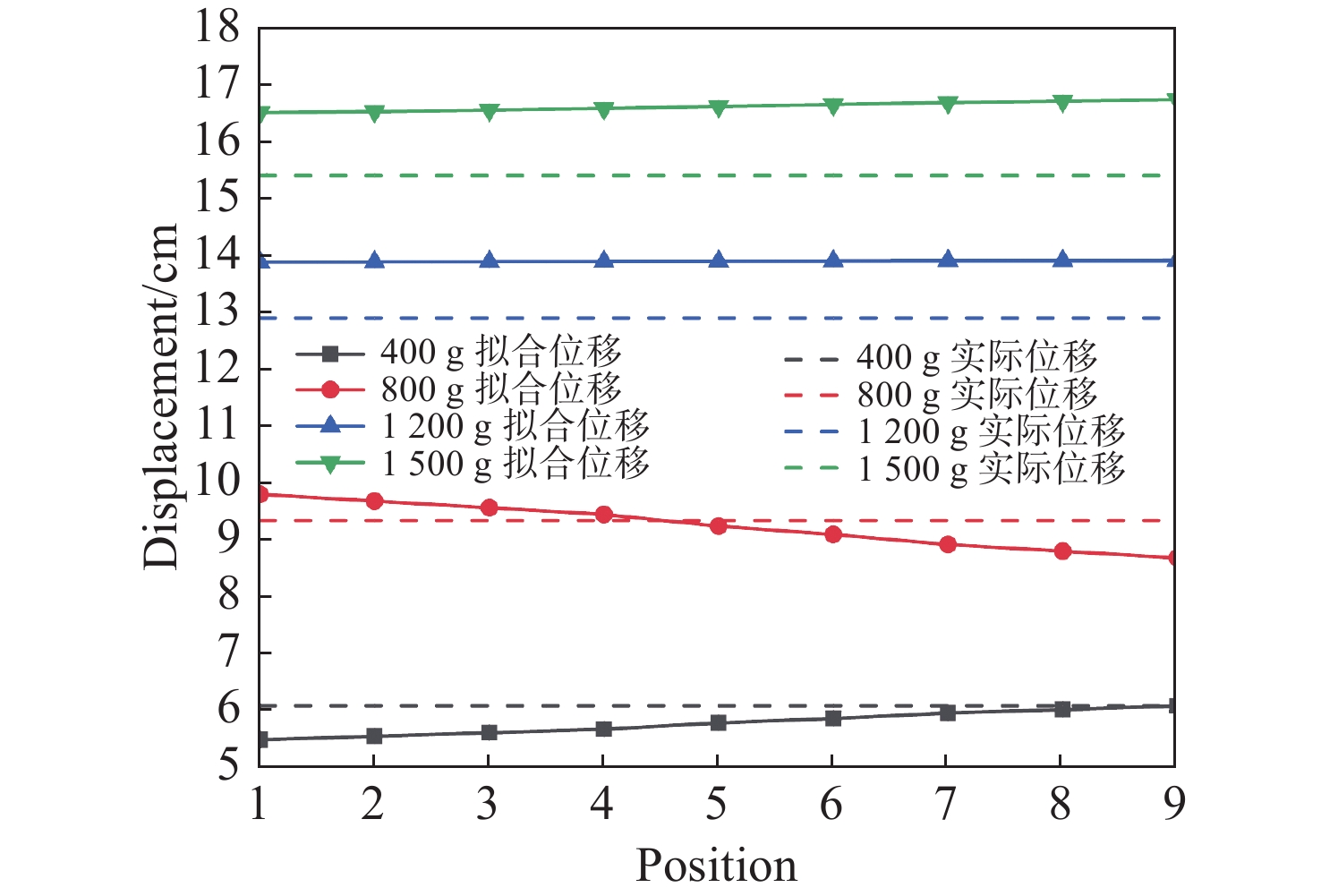
图 16 不同重量下板末端位移对比
Figure 16. Comparison of plate end displacement under different stresses

图 17 不同重量下板末端位移相对误差
Figure 17. Relative errors of plate end displacement under different stresses

图 18 不同重量下板末端位移绝对误差
Figure 18. Absolute errors of plate end displacement under different stresses

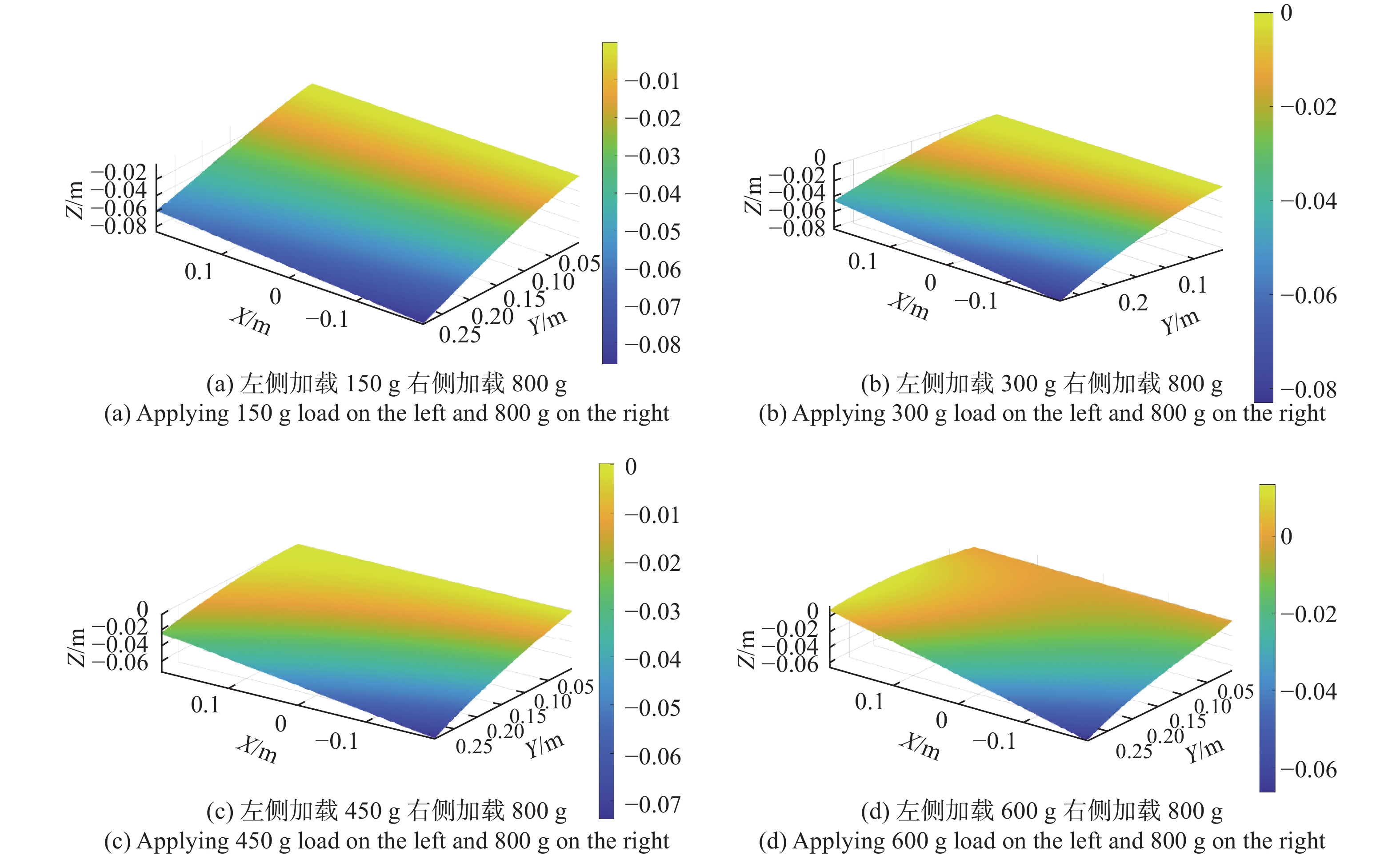
图 19 两端负载三维曲面重构拟合
Figure 19. Reconstruction and fitting of 3D surface under stress at both ends

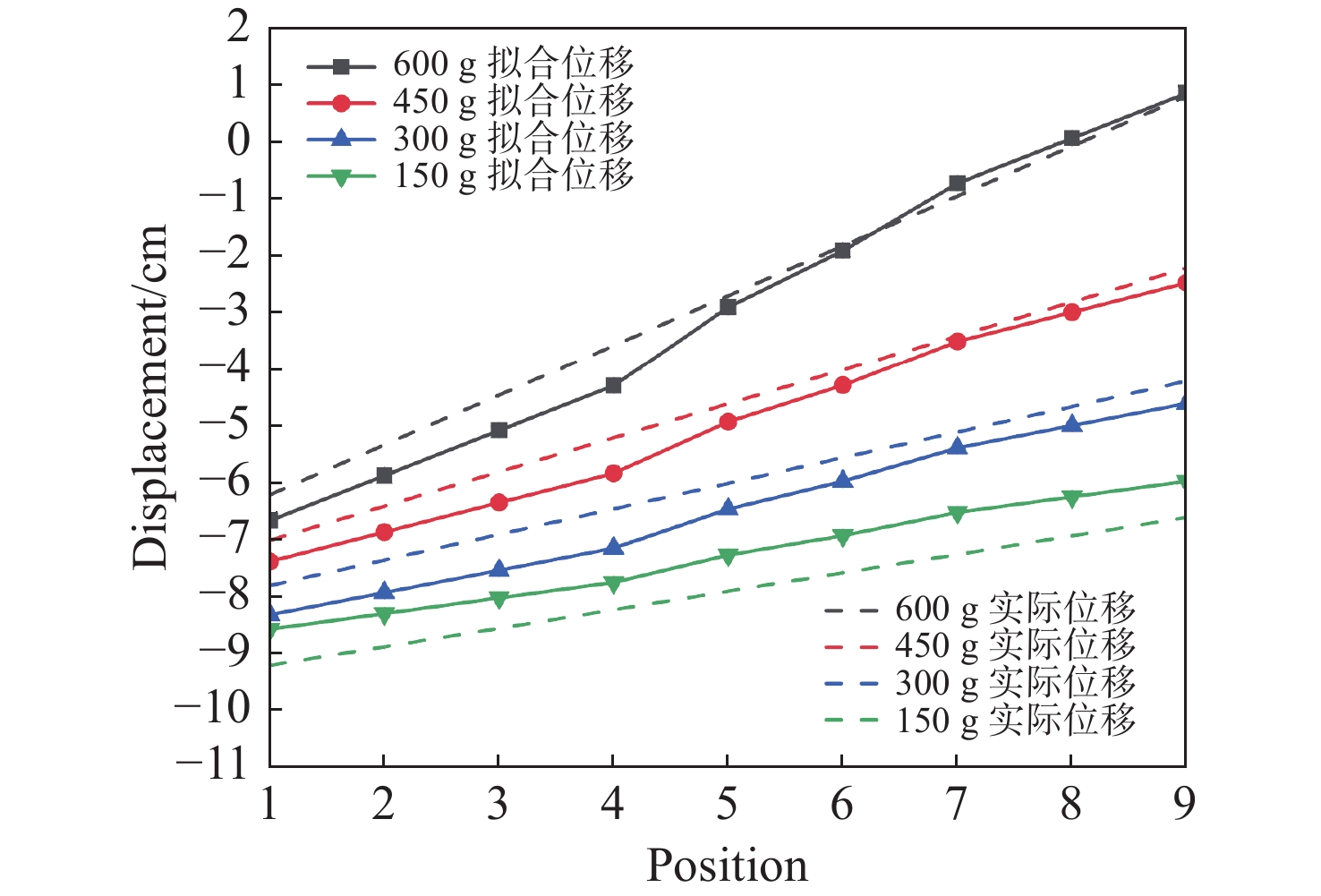
图 20 不同重量下板末端位移对比
Figure 20. Comparison of plate end displacement under different load’s weight

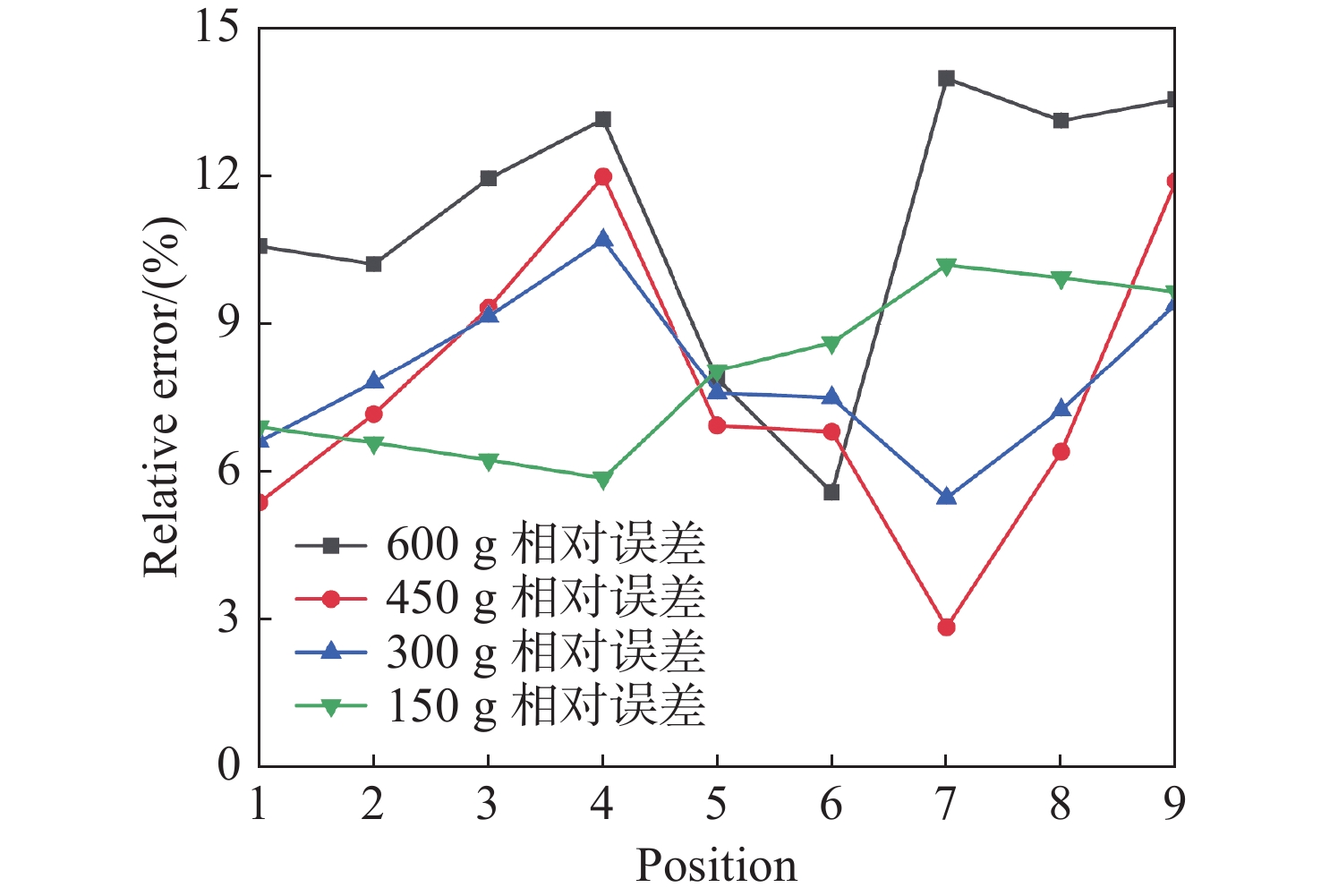
图 21 不同重量下板末端位移相对误差
Figure 21. Relative errors of plate end displacement under different load’s weight

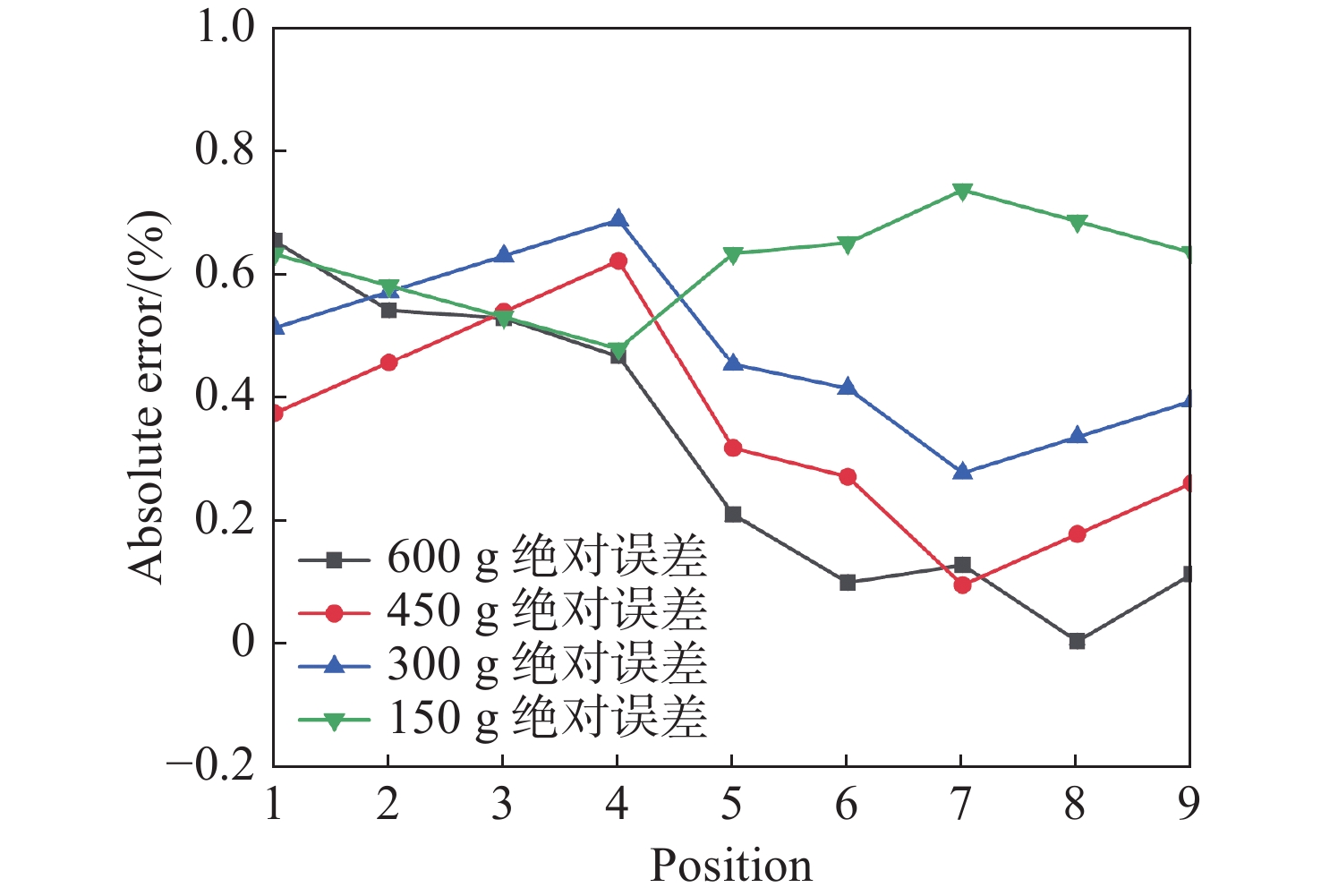
图 22 不同重量下板末端位移绝对误差
Figure 22. Absolute errors of plate end displacement under different load’s weight
表 1 实验材料参数
Table 1. Experimental material parameters
材料名称 弹性模量/GPa 泊松比 密度/(kg·m−1) 聚丙烯板 89 0.42 910 裸光纤 72 0.17 2203 硅胶 0.01 0.48 1084  下载: 导出CSV
下载: 导出CSV
-
[1] 陈小丽, 张波, 李杰, 等. 非接触电感式角位移传感器的设计与校准[J]. 仪器仪表学报,2022,43(2):36-42. doi: 10.19650/j.cnki.cjsi.J2108556CHEN X L, ZHANG B, LI J, et al. Design and calibration of the non-contact inductive angular displacement sensor[J]. Chinese Journal of Scientific Instrument, 2022, 43(2): 36-42. (in Chinese). doi: 10.19650/j.cnki.cjsi.J2108556 [2] RIZA M A, GO Y I, HARUN S W, et al. FBG sensors for environmental and biochemical applications-a review[J]. IEEE Sensors Journal, 2020, 20(14): 7614-7627. doi: 10.1109/JSEN.2020.2982446 [3] 曲道明, 孙广开, 李红, 等. 变形机翼柔性蒙皮形状光纤传感及重构方法[J]. 仪器仪表学报,2018,39(1):144-151. doi: 10.19650/j.cnki.cjsi.j1702537QU D M, SUN G K, LI H, et al. Optical fiber sensing and reconstruction method for morphing wing flexible skin shape[J]. Chinese Journal of Scientific Instrument, 2018, 39(1): 144-151. (in Chinese). doi: 10.19650/j.cnki.cjsi.j1702537 [4] 郭永兴, 张航, 熊丽, 等. 基于光纤布拉格光栅的扑翼机器人三维扑动变形测量[J]. 光学 精密工程,2023,31(9):1304-1313. doi: 10.37188/OPE.20233109.1304GUO Y X, ZHANG H, XIONG L, et al. Fiber Bragg grating based 3D flutter deformation measurement of flapping wing robot[J]. Optics and Precision Engineering, 2023, 31(9): 1304-1313. (in Chinese). doi: 10.37188/OPE.20233109.1304 [5] 王文娟, 薛景锋, 张梦杰, 等. 基于光纤传感的结构变形实时监测技术研究[J]. 航空科学技术,2022,33(12):97-104. doi: 10.19452/j.issn1007-5453.2022.12.011WANG W J, XUE J F, ZHANG M J, et al. Research on real-time monitoring technology of structural deformation based on optical fiber sensing[J]. Aeronautical Science & Technology, 2022, 33(12): 97-104. (in Chinese). doi: 10.19452/j.issn1007-5453.2022.12.011 [6] 郭永兴, 杨跃辉, 熊丽. 双层正交的光纤布拉格光栅柔性形状传感技术[J]. 光学 精密工程,2021,29(10):2306-2315. doi: 10.37188/OPE.20212910.2306GUO Y X, YANG Y H, XIONG L. Double-layer orthogonal fiber Bragg gratings flexible shape sensing technology[J]. Optics and Precision Engineering, 2021, 29(10): 2306-2315. (in Chinese). doi: 10.37188/OPE.20212910.2306 [7] 王永祥, 徐东华, 李春香, 等. 基于准分布式FBG传感网络的挖泥船耙管形状重构试验[J]. 船舶工程,2021,43(11):17-21,83. doi: 10.13788/j.cnki.cbgc.2021.11.04WANG Y X, XU D H, LI CH X, et al. Experiment on shape reconstruction of Dredger's suction pipe based on quasi-distributed FBG sensor network[J]. Ship Engineering, 2021, 43(11): 17-21,83. (in Chinese). doi: 10.13788/j.cnki.cbgc.2021.11.04 [8] 赵利明, 董明利, 李红, 等. 仿生柔性触角形状感知光纤传感方法研究[J]. 激光与红外,2018,48(4):509-514.ZHAO L M, DONG M L, LI H, et al. Research on shape sensing fiber optic sensing method of bionic flexible antenna[J]. Laser & Infrared, 2018, 48(4): 509-514. (in Chinese). [9] 梁磊, 胡程辉, 戴澍, 等. 基于FBG传感技术的管道曲率监测试验研究[J]. 光电子·激光,2021,32(5):499-504. doi: 10.16136/j.joel.2021.05.0374LIANG L, HU CH H, DAI SH, et al. Experimental research on pipeline curvature monitoring based on FBG sensing technology[J]. Journal of Optoelectronics·Laser, 2021, 32(5): 499-504. (in Chinese). doi: 10.16136/j.joel.2021.05.0374 [10] 安其昌, 吴小霞, 张景旭, 等. 大口径巡天望远镜分区域曲率传感方法研究[J]. 中国光学(中英文),2023,16(2):358-365. doi: 10.37188/CO.2022-0117AN Q CH, WU X X, ZHANG J X, et al. Subregion curvature sensing method for survey telescope with larger aperture[J]. Chinese Optics, 2023, 16(2): 358-365. (in Chinese). doi: 10.37188/CO.2022-0117 [11] 谭明享, 张东生. 基于频域反射的分布式光纤传感变形重构研究[J]. 光通信技术,2021,45(12):17-20. doi: 10.13921/j.cnki.issn1002-5561.2021.12.005TAN M X, ZHANG D SH. Research on deformation reconstruction of distributed optical fiber sensing based on frequency domain reflection[J]. Optical Communication Technology, 2021, 45(12): 17-20. (in Chinese). doi: 10.13921/j.cnki.issn1002-5561.2021.12.005 [12] 龙雨恒, 孙世政, 党晓圆. 一种十字型阵列的光纤光栅柔性力觉传感器[J]. 传感技术学报,2020,33(7):940-944. doi: 10.3969/j.issn.1004-1699.2020.07.003LONG Y H, SUN SH ZH, DANG X Y. A flexible force sensor with fiber Bragg grating cruciform array[J]. Chinese Journal of Sensors and Actuators, 2020, 33(7): 940-944. (in Chinese). doi: 10.3969/j.issn.1004-1699.2020.07.003 [13] 朱晓锦, 季玲晓, 张合生, 等. 基于空间正交曲率信息的三维曲线重构方法分析[J]. 应用基础与工程科学学报,2011,19(2):305-313.ZHU X J, JI X L, ZHANG H SH, et al. Analysis of 3D curve reconstruction method using orthogonal curvatures[J]. Journal of Basic Science and Engineering, 2011, 19(2): 305-313. (in Chinese). [14] 张新荣, 王鑫, 王瑶, 等. 基于转动式二维激光扫描仪和多传感器的三维重建方法[J]. 中国光学(中英文),2023,16(3):663-672. doi: 10.37188/CO.2022-0159ZHANG X R, WANG X, WANG Y, et al. 3D reconstruction method based on a rotating 2D laser scanner and multi-sensor[J]. Chinese Optics, 2023, 16(3): 663-672. (in Chinese). doi: 10.37188/CO.2022-0159 -

 下载:
下载:







计量
- 文章访问数: 445
- HTML全文浏览量: 143
- PDF下载量: 125
- 被引次数: 0
