


Underwater calibration image enhancement based on image block decomposition and fusion
-
摘要:
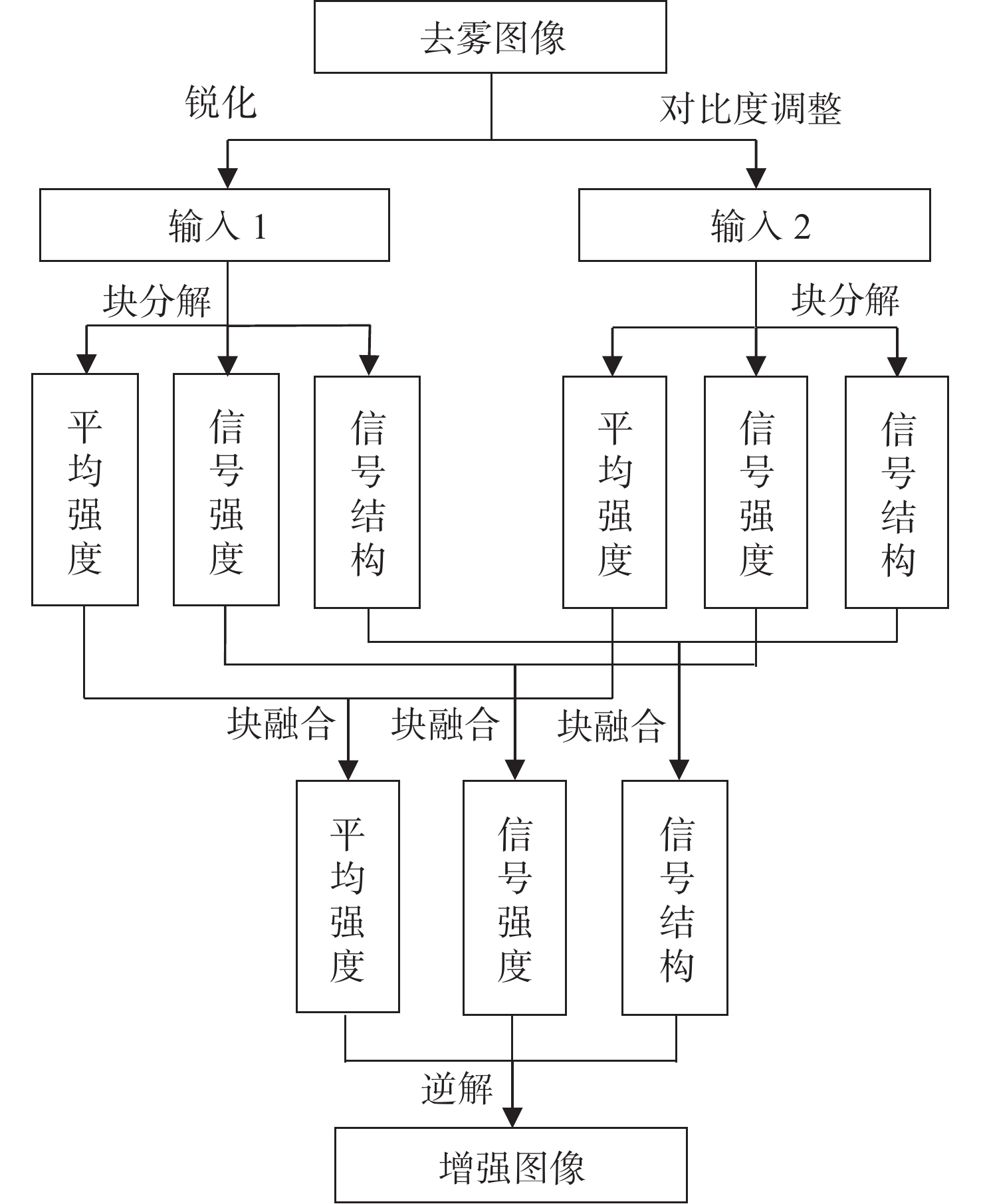
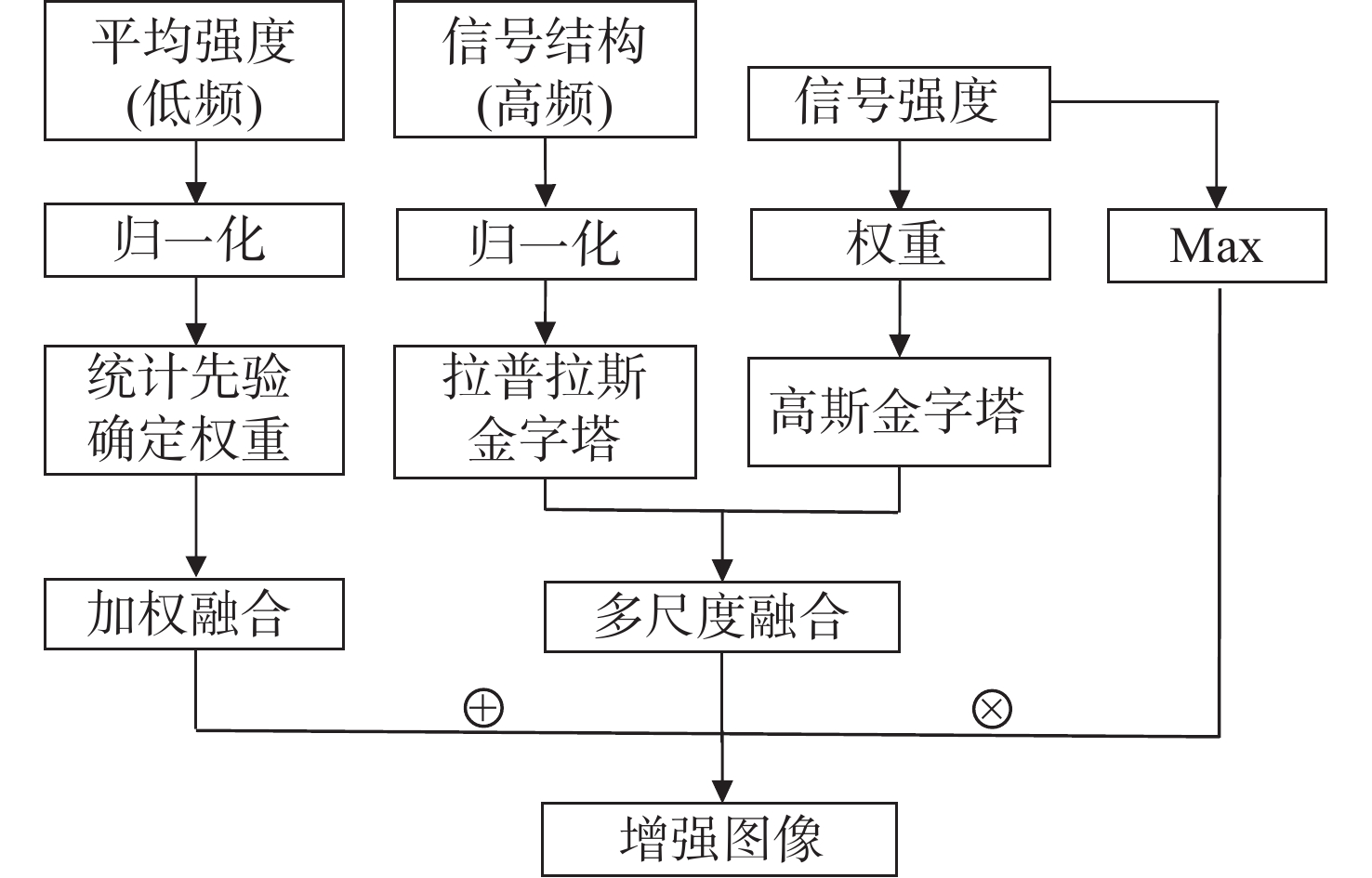
针对水下视觉测量中相机标定采集的水下标定图像退化造成标志点信息缺损的问题,提出了一种基于图像块分解融合的水下标定图像增强算法。首先,针对水下标定图像光照不均匀造成图像去雾困难的问题,基于同态滤波实现图像分割并计算全局背景光强,以实现图像去雾。然后,针对水下图像去雾后仍然存在噪声、模糊、光照不均匀等问题,分别进行对比度增强与细节信息增强以获得两幅互补增强图像,将互补图像划分成多个图像块,将图像块分解为平均强度、信号强度和信号结构3个独立分量,3个分量分开融合并求解最终增强图像。最后,采用主客观评价及标志点检测实验评价水下标定图像增强后的质量。实验结果表明,本文方法的视觉效果及客观评价得分均高于UDCP、MSR及ACDC方法,浑浊度为7.6NTU、11.4NTU、15.7NTU、18.4NTU时,标志点检测数量分别提高了2.0%、2.3%、9.3%、21.2%。因此,本文方法可以有效提高水下标定图像质量,为水下视觉测量提供一种稳定可靠的水下标定图像增强方法。
Abstract:Aiming at the loss of target point information caused by the degradation of underwater calibration images collected by camera calibration in underwater visual measurement, an underwater calibration image enhancement algorithm based on image block decomposition and fusion is proposed. First, given the difficulty of image dehazing caused by uneven illumination of underwater calibration images, image segmentation is implemented based on homomorphic filtering to calculate the global background light intensity and to achieve image dehazing. Then, given the problems such as noise, blur, and uneven illumination that still exist after the underwater image is dehazed, contrast enhancement and detail information enhancement are performed to obtain two complementary enhanced images. The complementary images are divided into multiple image blocks, and the image blocks are decomposed into three independent components, each of which is average intensity, signal intensity, and signal structure. The three components are separately fused and solved for the final enhanced image. Finally, subjective and objective evaluation and target point detection experiments are used to evaluate the enhanced quality of the underwater calibration image. Experimental results indicate that the visual effects and evaluation scores of the proposed method are higher than those of UDCP, MSR, and ACDC methods. When the turbidity is 7.6 NTU, 11.4 NTU, 15.7 NTU, and 18.4 NTU, the number of detected target points increases by 2.0%, 2.3%, 9.3%, and 21.2%. Therefore, we present a reliable and effective method to improve the quality of underwater calibration images and provides a stable and reliable underwater calibration image enhancement method for underwater visual measurement.
-
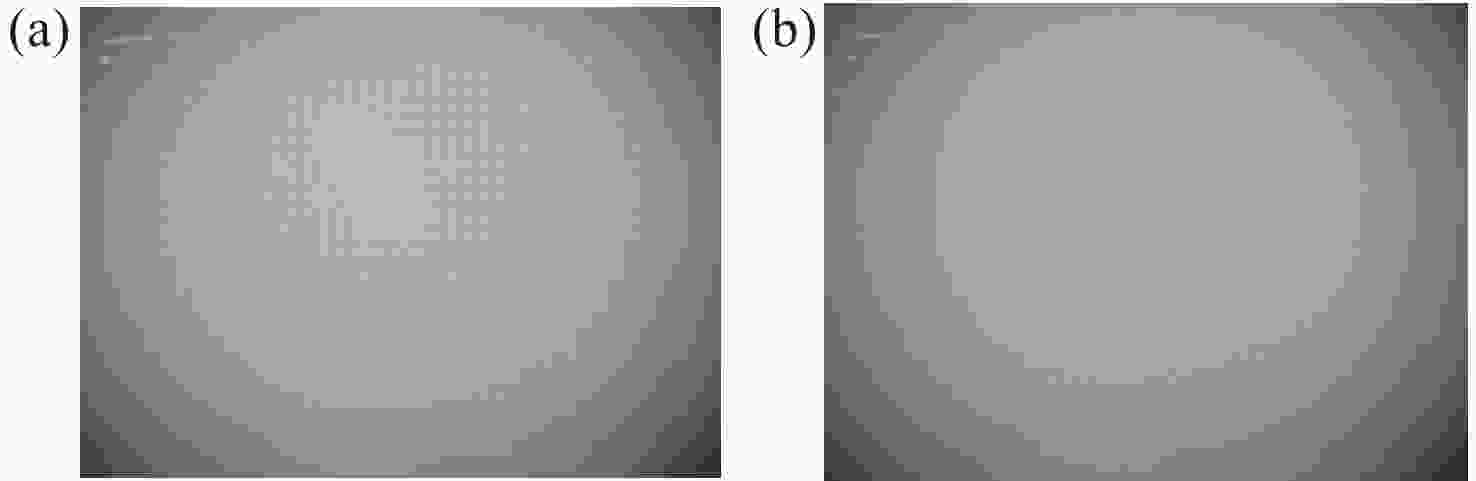
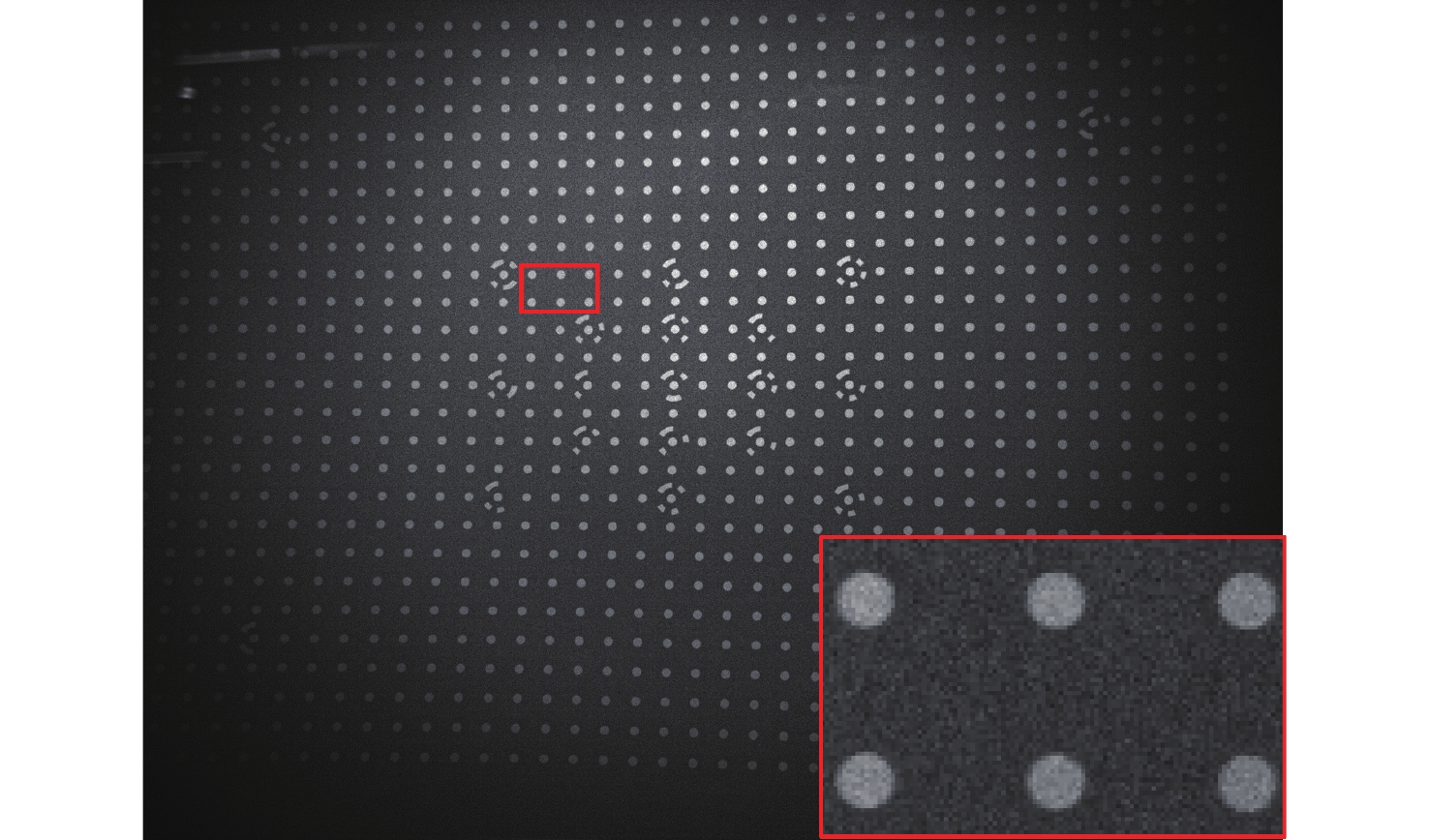
图 2 (a) 水下标定图像及(b) 最小值滤波结果
Figure 2. (a) Underwater calibration image and (b) minimum value filtering results
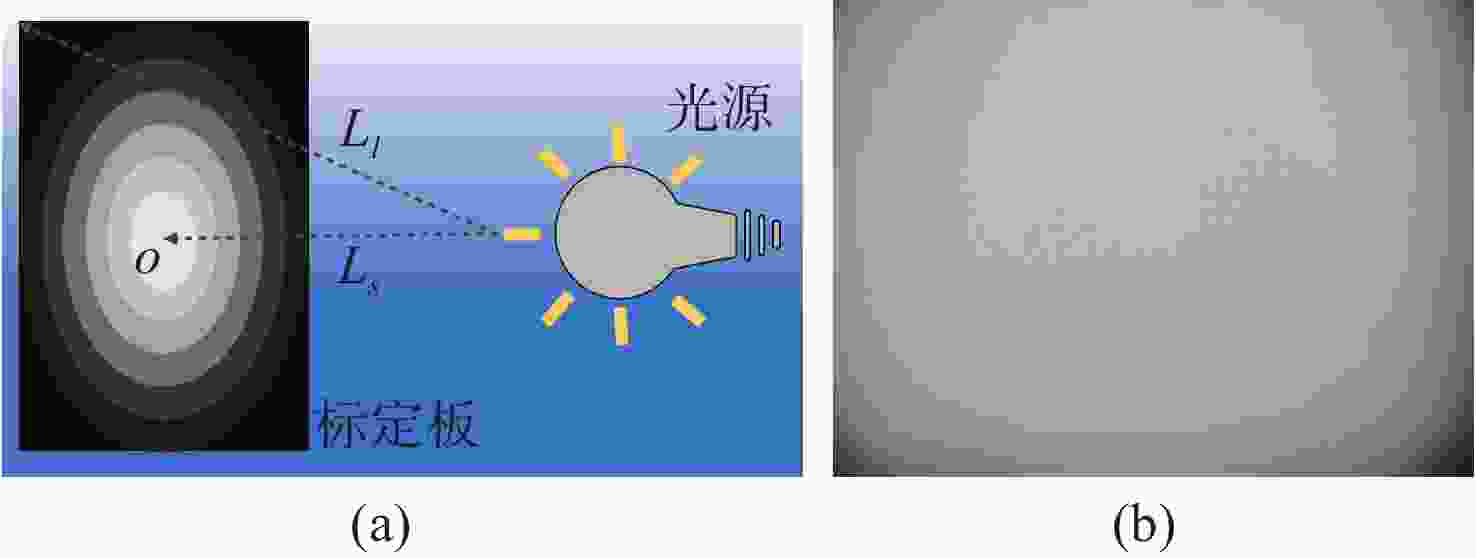
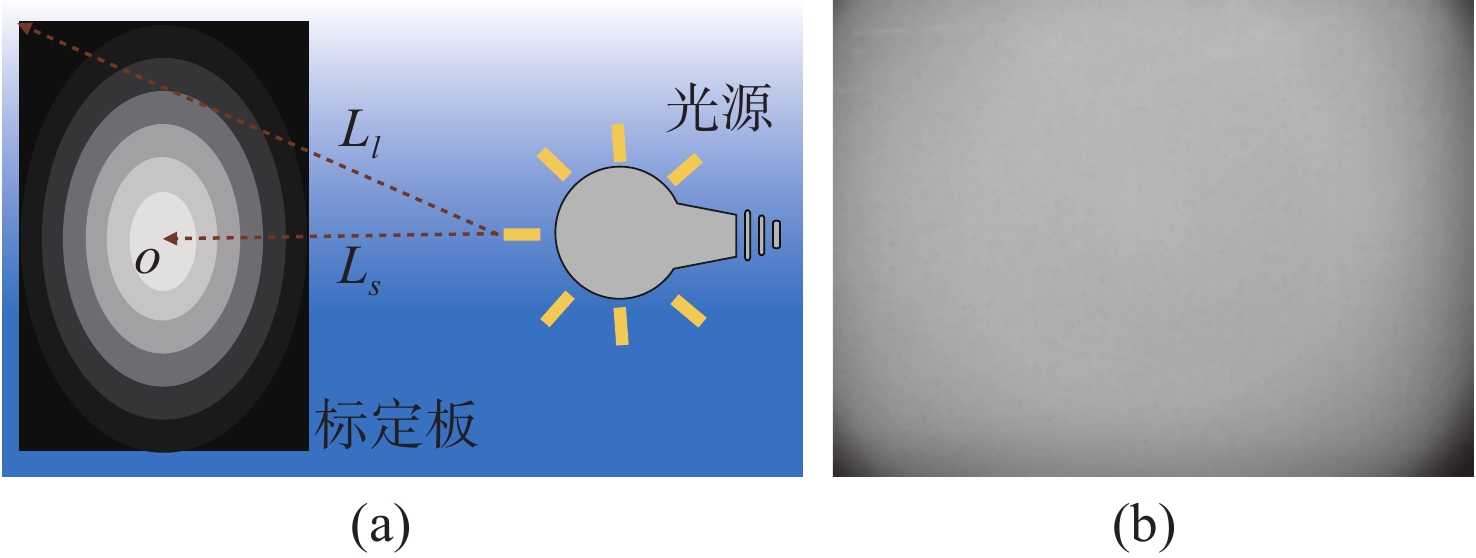
图 3 水下不均匀光照示意图。(a)光源垂直照射示意图;(b)水下光照不均匀图像
Figure 3. Schematic diagram of uneven underwater illumination. (a) Schematic diagram of light source vertical irradiation; (b) underwater uneven illumination image

图 4 水下标定图像及图像分割结果。(a) 水下标定图像;(b) Ostu法分割结果;(c) Sauvola法分割结果;(d) 本文方法分割结果
Figure 4. Underwater calibration image and image segmentation results. (a) Underwater calibration image; segmentation results of (b) Ostu method, (c) Sauvola method and (d) the method proposed in this paper
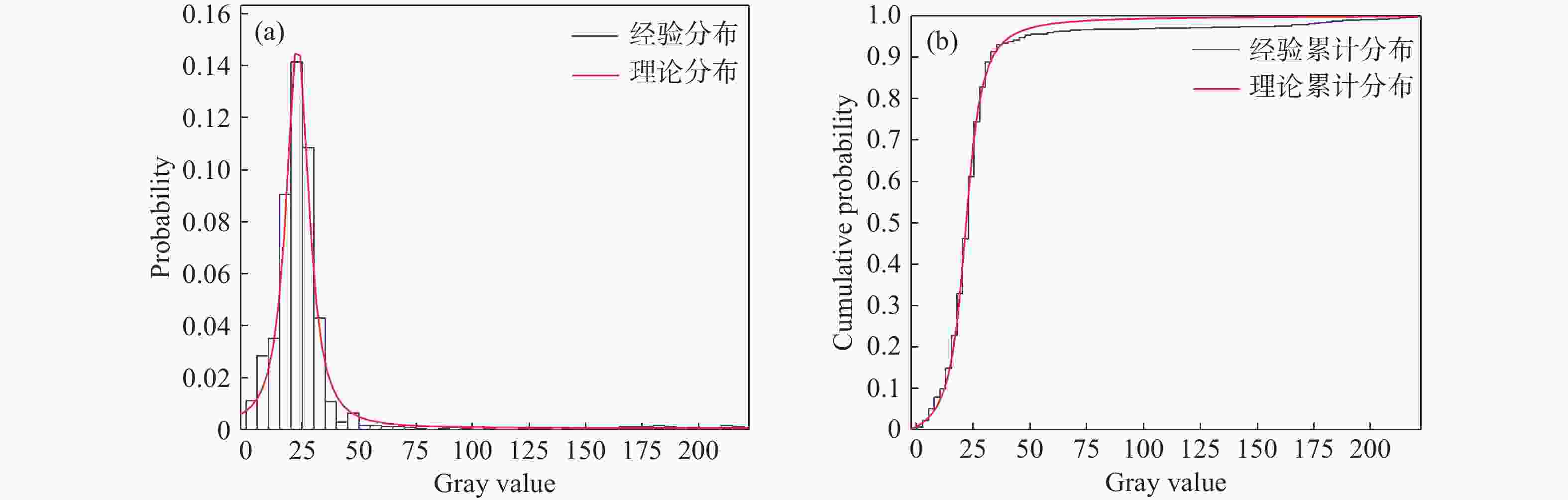
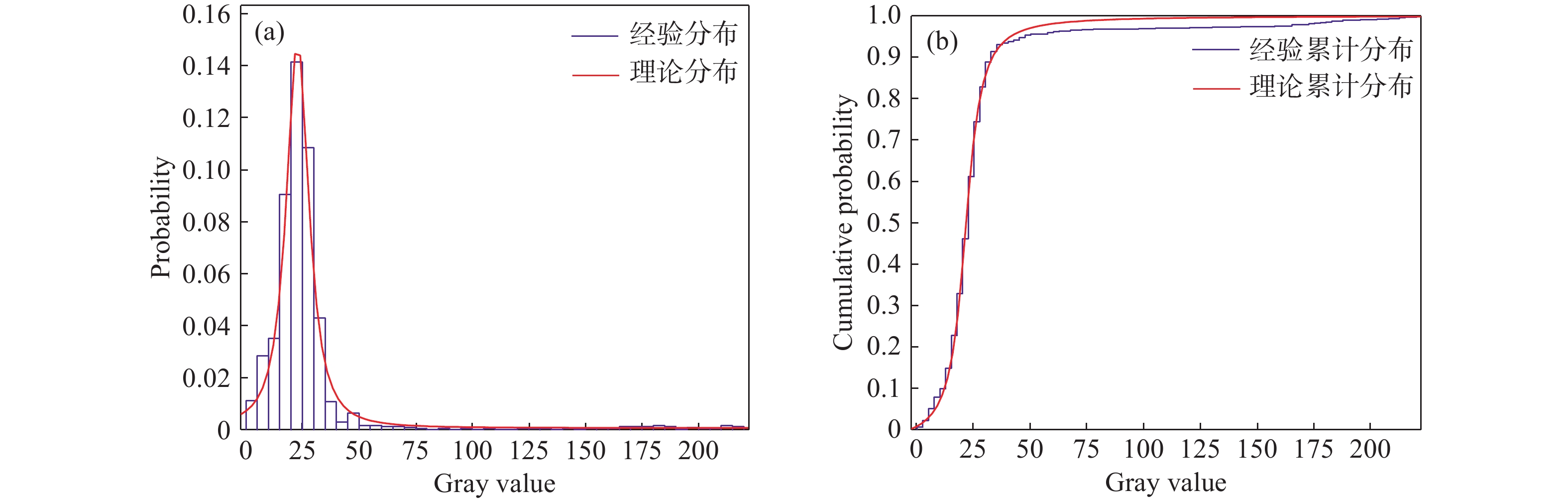
图 8 高质量水下标定图像的(a) 灰度分布及理论分布和(b) 灰度累计分布及理论累计分布
Figure 8. (a) Grayscale distribution and theoretical distribution and (b) grayscale cumulative distribution and theoretical cumulative distribution of high-quality underwater calibration images

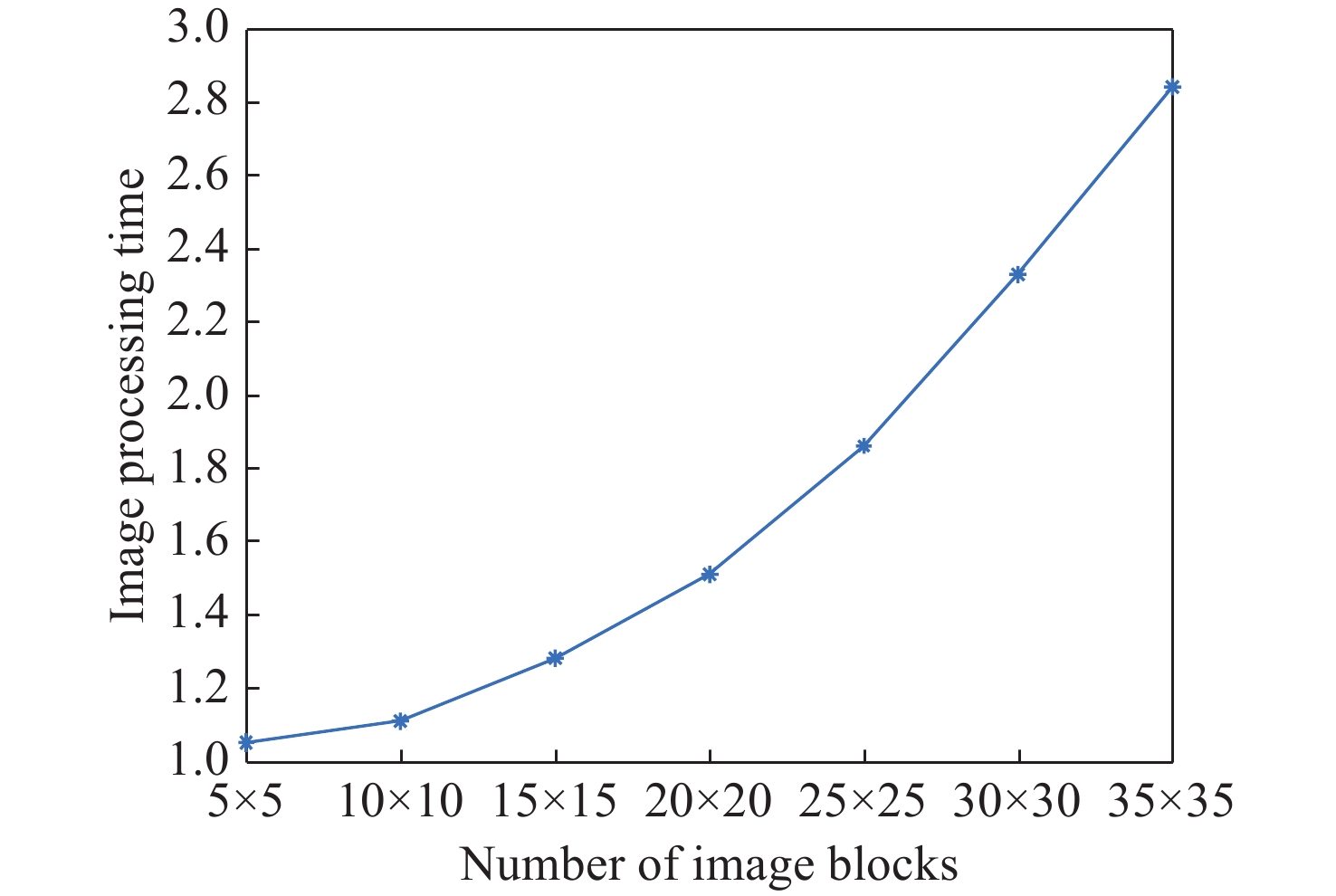
图 10 不同数量块增强结果。 (a) 5×5;(b) 10×10;(c) 20×20;(d) 30×30
Figure 10. Enhanced results of image blocks with different quantities. (a) 5×5; (b) 10×10; (c) 20×20; (d) 30×30
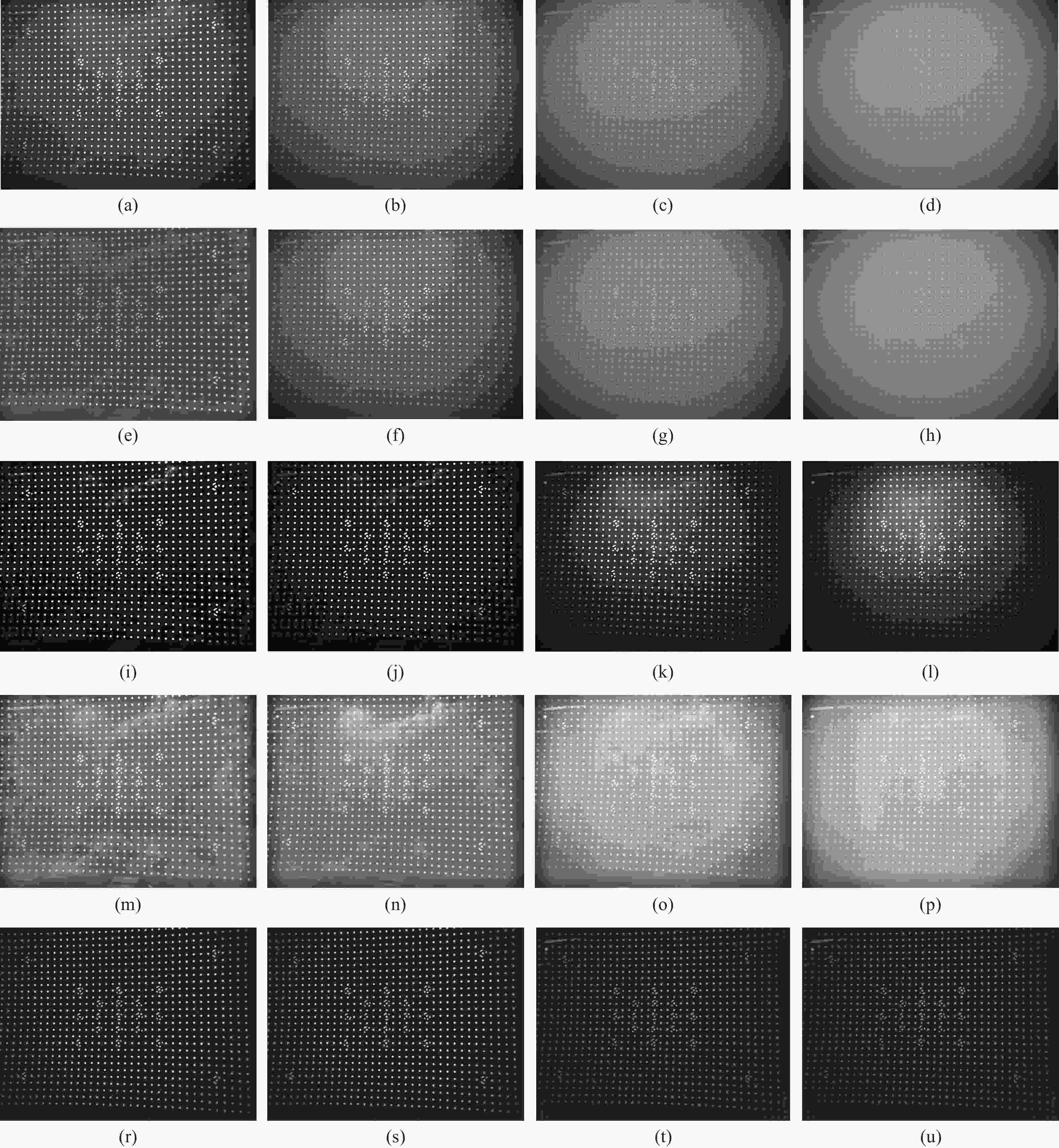
图 12 不同浑浊度下的标定图像及增强后结果。(a)~(d) 7.6NTU, 11.4NTU, 15.7NTU, 18.4NTU不同浑浊度水下标定图像;(e)~(h) MSR增强结果;(i)~(l) UDCP增强结果;(m)~(p) ACDC增强结果;(r)~(u) 本文方法增强结果
Figure 12. Underwater calibration images and enhanced results under different turbidities. (a)~(d) turbidity are 7.6 NTU, 11.4 NTU, 15.7 NTU, 18.4NTU; (e)~(h) enhanced results by MSR; (i)~(l) enhanced results by UDCP; (m)~(p) enhanced results by ACDC; (r)~(u) enhanced results by the proposed method
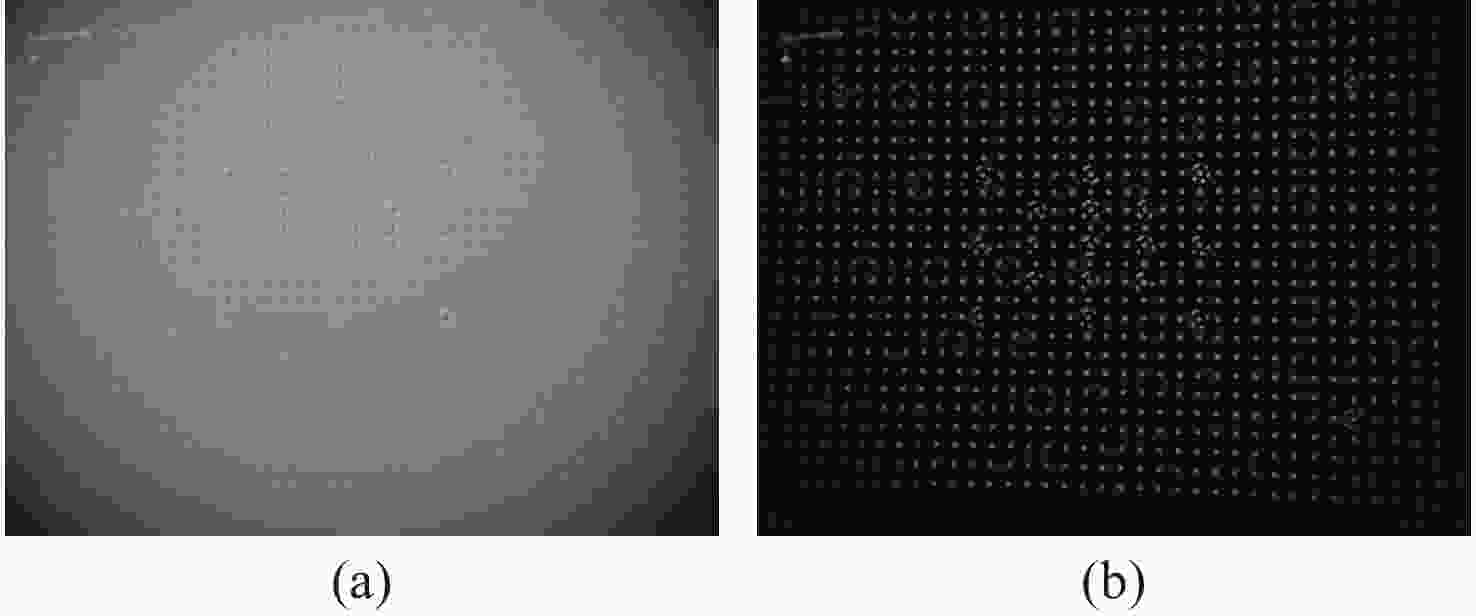
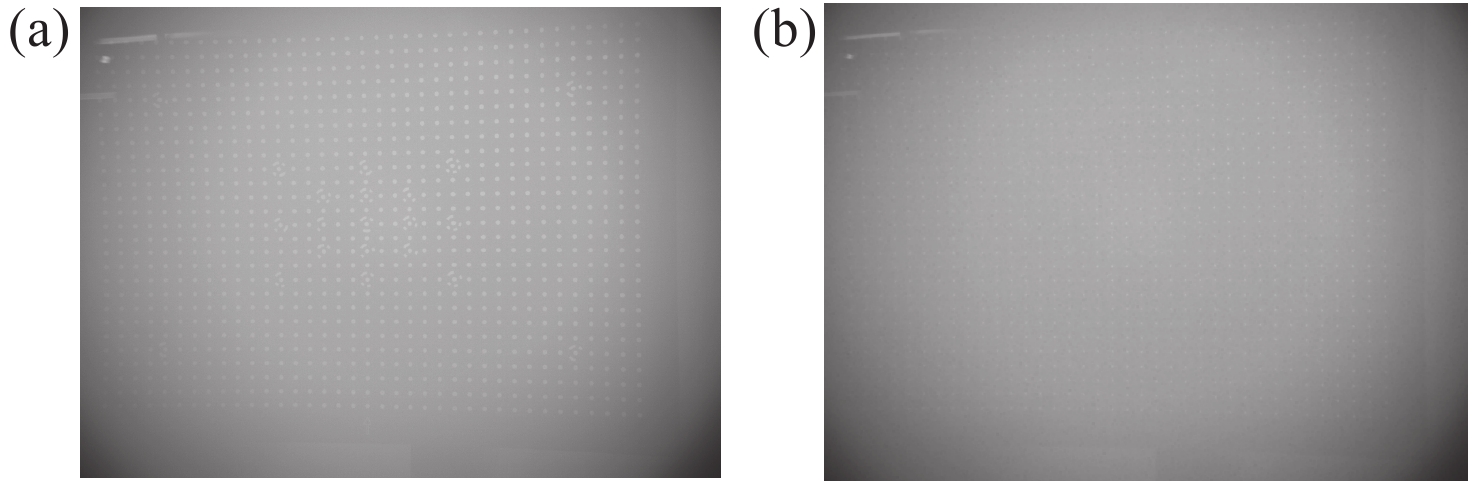
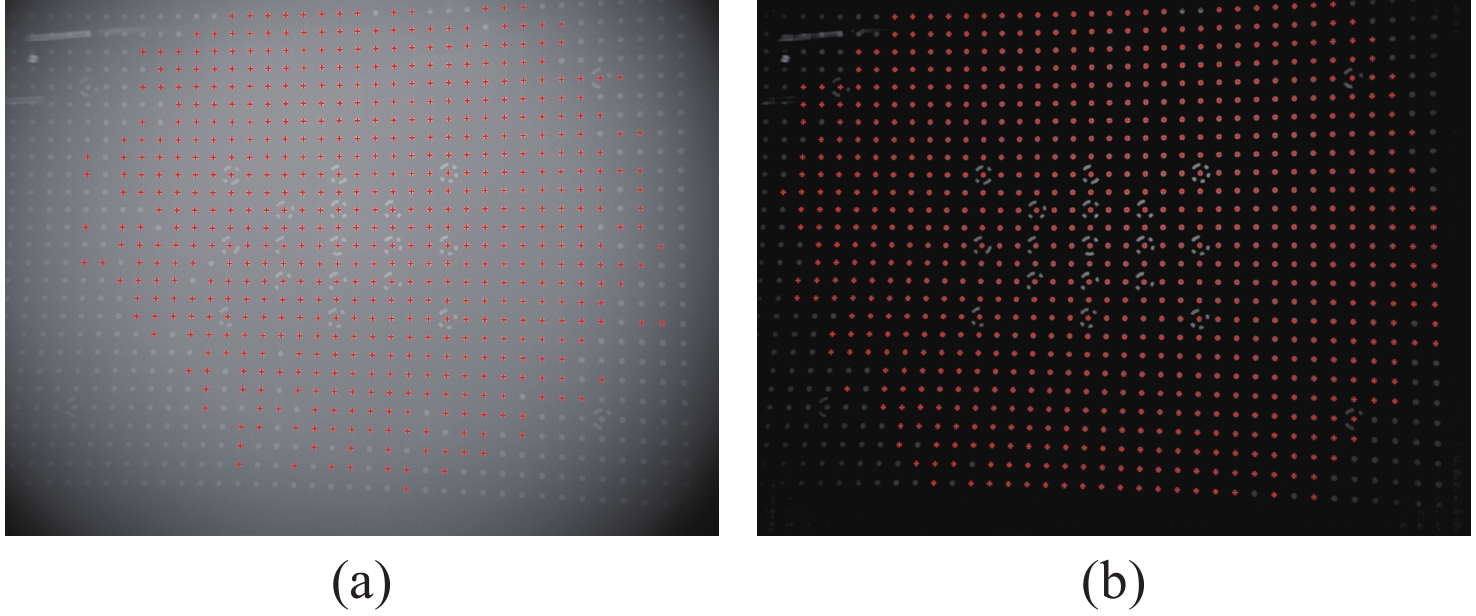
图 13 图像增强前(a)、后(b)标志点检测结果
Figure 13. Target point detection results (a) before and (b) after image enhancement
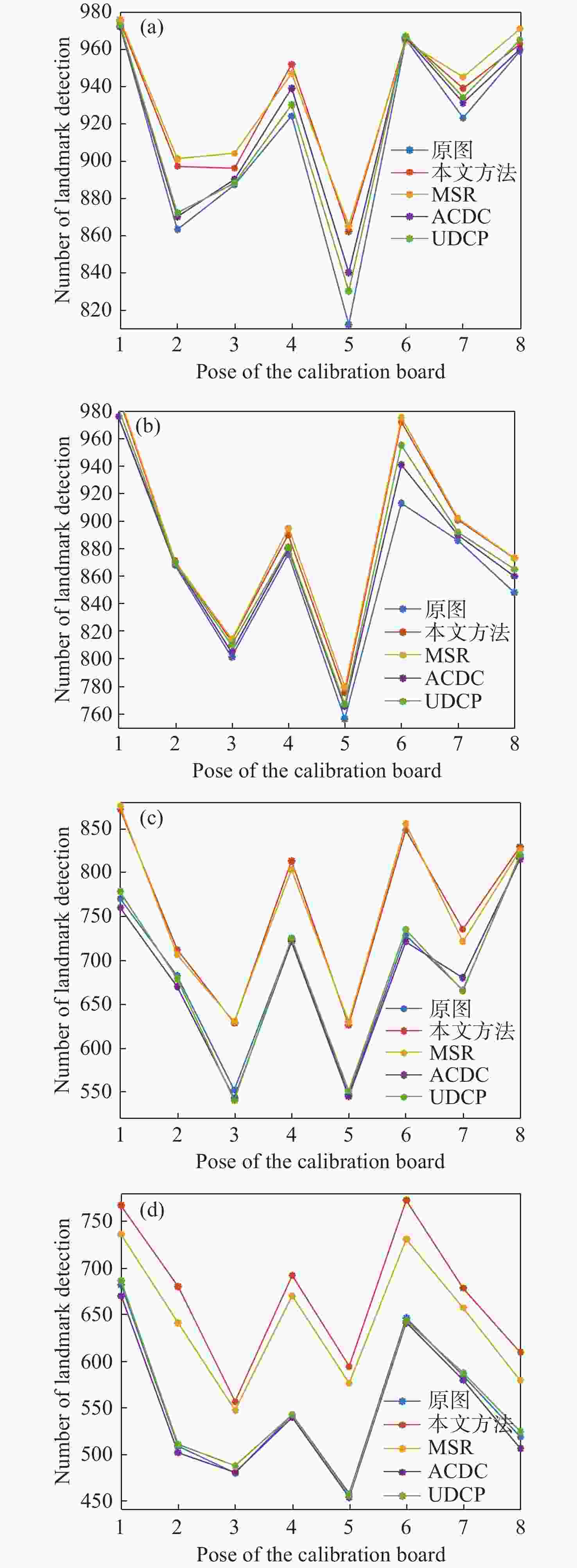
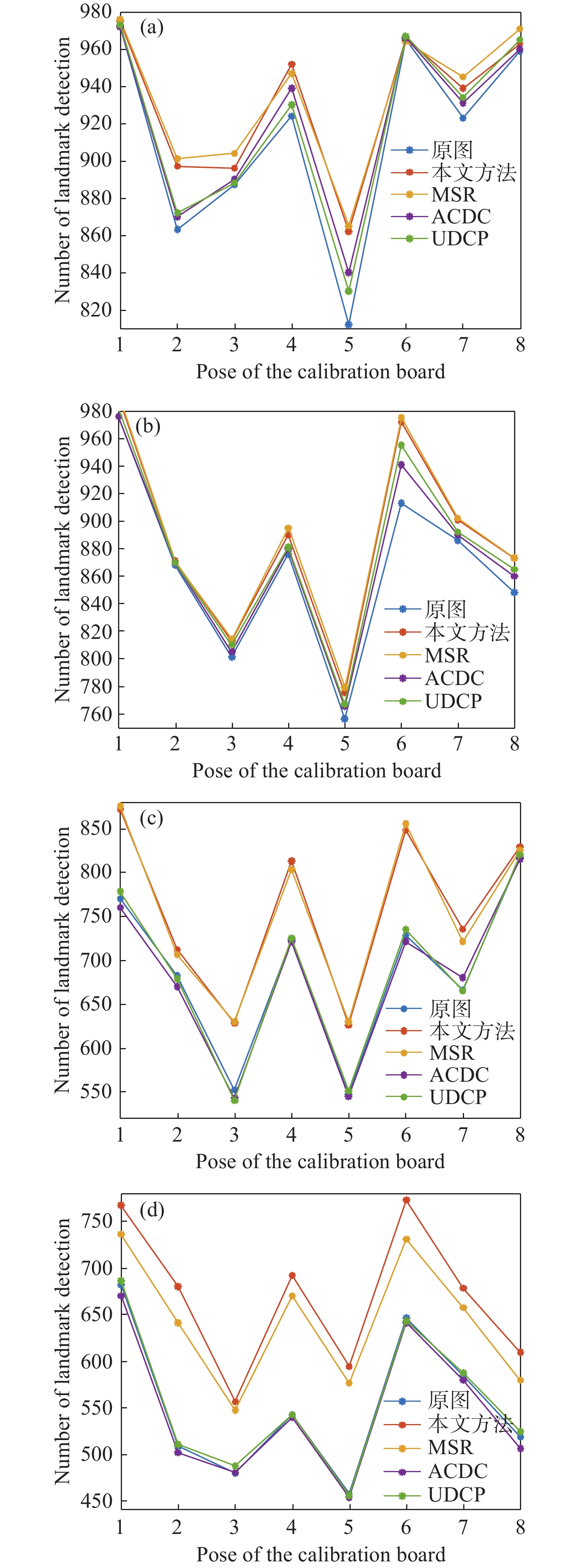
图 14 不同方法在不同浑浊度下不同位姿标志点检测数量。(a) 7.6NTU;(b) 11.4NTU;(c) 15.7NTU;(d) 18.4NTU
Figure 14. Number of detected target points in different postures under different turbidities; (a) 7.6NTU; (b) 11.4NTU; (c) 15.7NTU; (d) 18.4NTU
表 1 不同算法增强后UISM对比
Table 1. Comparison of UISM enhanced by different algorithms
浑浊度(NTU) 原图 MSR UDCP ACDC 本文 7.6 0.058 0.154 0.068 0.069 0.212 11.4 0.033 0.120 0.039 0.061 0.197 15.7 0.021 0.083 0.022 0.042 0.183 18.4 0.015 0.063 0.015 0.035 0.174  下载: 导出CSV
下载: 导出CSV
表 2 不同算法增强后UIConM对比
Table 2. Comparison of UIConM enhanced by different algorithms
浑浊度(NTU) 原图 MSR UDCP ACDC 本文 7.6 0.915 0.920 0.944 0.939 0.945 11.4 0.904 0.918 0.936 0.935 0.944 15.7 0.860 0.878 0.918 0.932 0.942 18.4 0.831 0.858 0.908 0.925 0.940
下载: 导出CSV
表 3 不同算法图像增强后标志点检测数量增加比例
Table 3. The increase proportion in the number of target point detections after image enhancement by different algorithms
浑浊度(NTU) MSR UDCP ACDC 本文 7.6 2.3% 0.7% 0.8% 2.0% 11.4 2.5% 1.4% 0.9% 2.3% 15.7 9.0% 0.1% −0.5% 9.3% 18.4 16.3% 0.4% −1.1% 21.2%
下载: 导出CSV
-
[1] CHEN B Q, LI H SH, WANG R R, et al. 3D surface measurement of static and dynamic objects in underwater environments based on the propagation and projection of CW sinusoidal signal at 532 nm[J]. Measurement, 2022, 188: 110521. doi: 10.1016/j.measurement.2021.110521 [2] 刘涛, 关添航, 杜宏旺, 等. 基于线结构光的水下旋转扫描高精度测量方法研究[J]. 仪器仪表学报,2023,44(7):260-270.LIU T, GUAN T H, DU H W, et al. Research on the high precision measurement method of underwater rotary scanning based on linear structured light[J]. Chinese Journal of Scientific Instrument, 2023, 44(7): 260-270. (in Chinese). [3] 高新浩, 黄茹楠, 杨育林. 水下相机标定算法研究[J]. 燕山大学学报,2014,38(3):252-258. doi: 10.3969/j.issn.1007-791X.2014.03.011GAO X H, HUANG R N, YANG Y L. Study on underwater camera calibration algorithm[J]. Journal of Yanshan University, 2014, 38(3): 252-258. (in Chinese). doi: 10.3969/j.issn.1007-791X.2014.03.011 [4] 许廷发, 苏畅, 罗璇, 等. 基于梯度和小波变换的水下距离选通图像去噪[J]. 中国光学,2016,9(3):301-311. doi: 10.3788/co.20160903.0301XU T F, SU CH, LUO X, et al. Underwater range-gated image denoising based on gradient and wavelet transform[J]. Chinese Optics, 2016, 9(3): 301-311. (in Chinese). doi: 10.3788/co.20160903.0301 [5] 魏郭依哲, 陈思遥, 刘玉涛, 等. 水下图像增强和修复算法综述[J]. 计算机应用研究,2021,38(9):2561-2569,2589.WEI G Y ZH, CHEN S Y, LIU Y T, et al. Survey of underwater image enhancement and restoration algorithms[J]. Application Research of Computers, 2021, 38(9): 2561-2569,2589. (in Chinese). [6] SINGH N, BHAT A. A systematic review of the methodologies for the processing and enhancement of the underwater images[J]. Multimedia Tools and Applications, 2023, 82(25): 38371-38396. doi: 10.1007/s11042-023-15156-9 [7] 林明星, 代成刚, 董雪, 等. 水下图像处理技术研究综述[J]. 测控技术,2020,39(8):7-20.LIN M X, DAI CH G, DONG X, et al. Survey of underwater image processing technology[J]. Measurement & Control Technology, 2020, 39(8): 7-20. (in Chinese). [8] CHEN Y ZH, YANG K CH, ZHANG X H, et al. Modelling of beam propagation and its applications for underwater imaging[J]. Frontiers of Optoelectronics in China, 2011, 4(4): 398-406. doi: 10.1007/s12200-011-0219-9 [9] 张赫, 徐玉如, 万磊, 等. 水下退化图像处理方法[J]. 天津大学学报,2010,43(9):827-833. doi: 10.3969/j.issn.0493-2137.2010.09.012ZHANG H, XU Y R, WAN L, et al. Processing method for underwater degenerative image[J]. Journal of Tianjin University, 2010, 43(9): 827-833. (in Chinese). doi: 10.3969/j.issn.0493-2137.2010.09.012 [10] JAFFE J S. Computer modeling and the design of optimal underwater imaging systems[J]. IEEE Journal of Oceanic Engineering, 1990, 15(2): 101-111. doi: 10.1109/48.50695 [11] 周丽丽, 朱佳琦, 王桥桥, 等. 基于雾线暗通道先验的水下图像复原方法[J]. 南京邮电大学学报(自然科学版),2020,40(4):64-69.ZHOU L L, ZHU J Q, WANG Q Q, et al. Underwater image restoration method based on haze-line and dark channel prior[J]. Journal of Nanjing University of Posts and Telecommunications (Natural Science), 2020, 40(4): 64-69. (in Chinese). [12] 王智奇, 李荣冰, 刘建业, 等. 基于同态滤波和直方图均衡化的图像增强算法[J]. 电子测量技术,2020,43(24):75-80.WANG ZH Q, LI R B, LIU J Y, et al. Image enhancement algorithm based on homomorphic filtering and histogram equalization[J]. Electronic Measurement Technology, 2020, 43(24): 75-80. (in Chinese). [13] 杨淼, 王海文, 胡珂, 等. 一种基于色彩补偿的水下图像综合增强算法[J]. 图学学报,2021,42(1):59-64.YANG M, WANG H W, HU K, et al. An underwater image comprehensive enhancement algorithm based on color compensation[J]. Journal of Graphics, 2021, 42(1): 59-64. (in Chinese). [14] 李广豪, 席志红. 基于图像融合的水下光照不均匀图像增强算法[J]. 计算机仿真,2023,40(4):330-335. doi: 10.3969/j.issn.1006-9348.2023.04.064LI G H, XI ZH H. Image enhancement algorithm of underwater uneven illumination based on image fusion[J]. Computer Simulation, 2023, 40(4): 330-335. (in Chinese). doi: 10.3969/j.issn.1006-9348.2023.04.064 [15] YANG M, HU J T, LI CH Y, et al. An in-depth survey of underwater image enhancement and restoration[J]. IEEE Access, 2019, 7: 123638-123657. doi: 10.1109/ACCESS.2019.2932611 [16] 张辉. 水的光学特性对水下光学成像质量影响的分析[J]. 电子测试,2013(20):261-262. doi: 10.3969/j.issn.1000-8519.2013.20.125ZHANG H. Analysis of optical properties of water on the influence of optical imaging quality under water[J]. Electronic Test,2013(20):261-262. (in Chinese). doi: 10.3969/j.issn.1000-8519.2013.20.125 [17] 蒲欢. 海洋湍流对光学成像及光束空间相干性的影响[D]. 成都: 四川师范大学, 2017.PU H. Influence of oceanic turbulence on optical imaging and spatial coherence of beams[D]. Chengdu: Sichuan Normal University, 2017. (in Chinese). [18] 刘镕滔, 柳稼航. 海底主动光学探测影像亮度校正与色彩恢复[J]. 中国光学(中英文),2022,15(4):689-702. doi: 10.37188/CO.2021-0211LIU R T, LIU J H. Brightness correction and color restoration of seabed image obtained by active optical detection[J]. Chinese Optics, 2022, 15(4): 689-702. (in Chinese). doi: 10.37188/CO.2021-0211 [19] PENG Y T, ZHAO X Y, COSMAN P C. Single underwater image enhancement using depth estimation based on blurriness[C]. 2015 IEEE International Conference on Image Processing (ICIP), IEEE, 2015: 4952-4956. [20] KANG Y Z, JIANG Q P, LI CH Y, et al. A perception-aware decomposition and fusion framework for underwater image enhancement[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2023, 33(3): 988-1002. doi: 10.1109/TCSVT.2022.3208100 [21] GHANI A S A, ISA N A M. Underwater image quality enhancement through integrated color model with Rayleigh distribution[J]. Applied Soft Computing, 2015, 27: 219-230. doi: 10.1016/j.asoc.2014.11.020 [22] LYU N Q, YU H T, HAN J, et al. Structured light-based underwater 3-D reconstruction techniques: A comparative study[J]. Optics and Lasers in Engineering, 2023, 161: 107344. doi: 10.1016/j.optlaseng.2022.107344 [23] ZHANG W D, WANG Y D, LI CH Y. Underwater image enhancement by attenuated color channel correction and detail preserved contrast enhancement[J]. IEEE Journal of Oceanic Engineering, 2022, 47(3): 718-735. doi: 10.1109/JOE.2022.3140563 [24] JOBSON D J, RAHMAN Z U, WOODELL G A. Properties and performance of a center/surround retinex[J]. IEEE Transactions on Image Processing, 1997, 6(3): 451-462. doi: 10.1109/83.557356 [25] DREWS P JR, DO NASCIMENTO E, MORAES F, et al. Transmission estimation in underwater single images[C]. Proceedings of the 2013 IEEE International Conference on Computer Vision Workshops, IEEE, 2013: 825-830. [26] PANETTA K, GAO CH, AGAIAN S. Human-visual-system-inspired underwater image quality measures[J]. IEEE Journal of Oceanic Engineering, 2016, 41(3): 541-551. doi: 10.1109/JOE.2015.2469915 [27] 刘建伟. 大视场三维动态变形视频测量系统关键技术研究[D]. 西安: 西安交通大学, 2011.LIU J W. Key techniques of large-field 3D dynamic deformation videogrammetry system[D]. Xi'an: Xi’an Jiaotong University, 2011. (in Chinese). -

 下载:
下载:




计量
- 文章访问数: 833
- HTML全文浏览量: 328
- PDF下载量: 100
- 被引次数: 0
