


Improved AO optimization algorithm for distortion parameter estimation of catadioptric omnidirectional lens
-
摘要:
针对现有镜头畸变参数估计方法存在精度低、易陷入局部最优解的问题,提出了一种基于改进天鹰优化算法的折反射全景相机镜头畸变参数方法。首先,通过融合混沌映射、自适应调节策略和通讯交流策略,增强了天鹰优化算法的寻优能力,解决了其收敛速度慢且容易陷入局部最优解的问题;其次,通过空间中直线对应的畸变边缘和单参数除法模型推导并确定畸变参数分布范围;然后,构建包含畸变参数的优化目标函数;最后,采用改进的天鹰优化算法对优化目标函数寻优求得最佳畸变参数。通过对标准图库图像和全景图像的校正结果进行分析,本文提出的方法估计的主点误差在0.5 pixel以内,径向畸变系数误差在2.5%以内,能够有效估计镜头畸变参数并实现全景图像畸变校正。本文方法提高了视觉导航系统在环境感知任务下的图像质量,在工程应用中具有潜在价值。
Abstract:Aiming at the problems of low accuracy and easy to fall into local optimal solutions of the existing lens distortion parameter estimation methods, a catadioptric omnidirectional camera lens distortion parameter method based on the improved Aquila Optimization (AO) algorithm is proposed. Firstly, the optimization ability of the AO algorithm is enhanced by integrating chaotic mapping, adaptive adjustment strategy, and population optimization strategy, which solves the problems of slow convergence speed and proneness to falling into local optimal solutions. Secondly, the distribution range of distortion parameters is derived and determined by the corresponding distortion edges of straight lines in the space and the single parameter division model. Then, the optimization objective function containing the distortion parameters is constructed. Finally, the improved AO algorithm is used to find the best distortion parameters for the optimization objective function. After analyzing the correction results of standard gallery images and omnidirectional images, the method proposed in this paper estimates the main point error within 0.5 pixels and the radial aberration coefficient error within 2.5%. It can effectively estimate the lens aberration parameters and realize the omnidirectional image aberration correction. It improves the visual navigation system's image quality under the task of environment perception and is valuable in engineering applications.
-
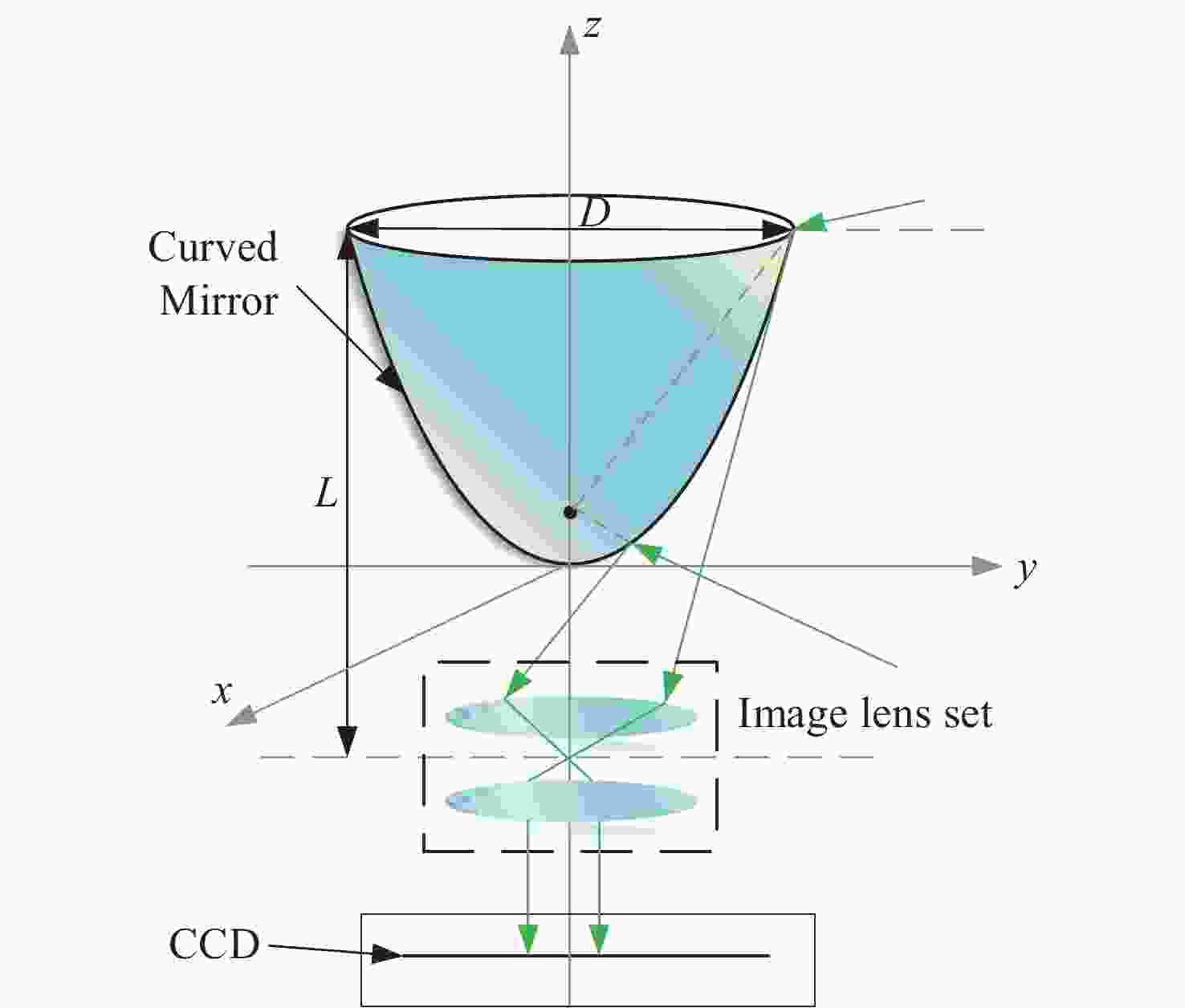
图 1 折反射全景相机成像示意图
Figure 1. Schematic diagram of imaging for catadioptric omnidirectional camera
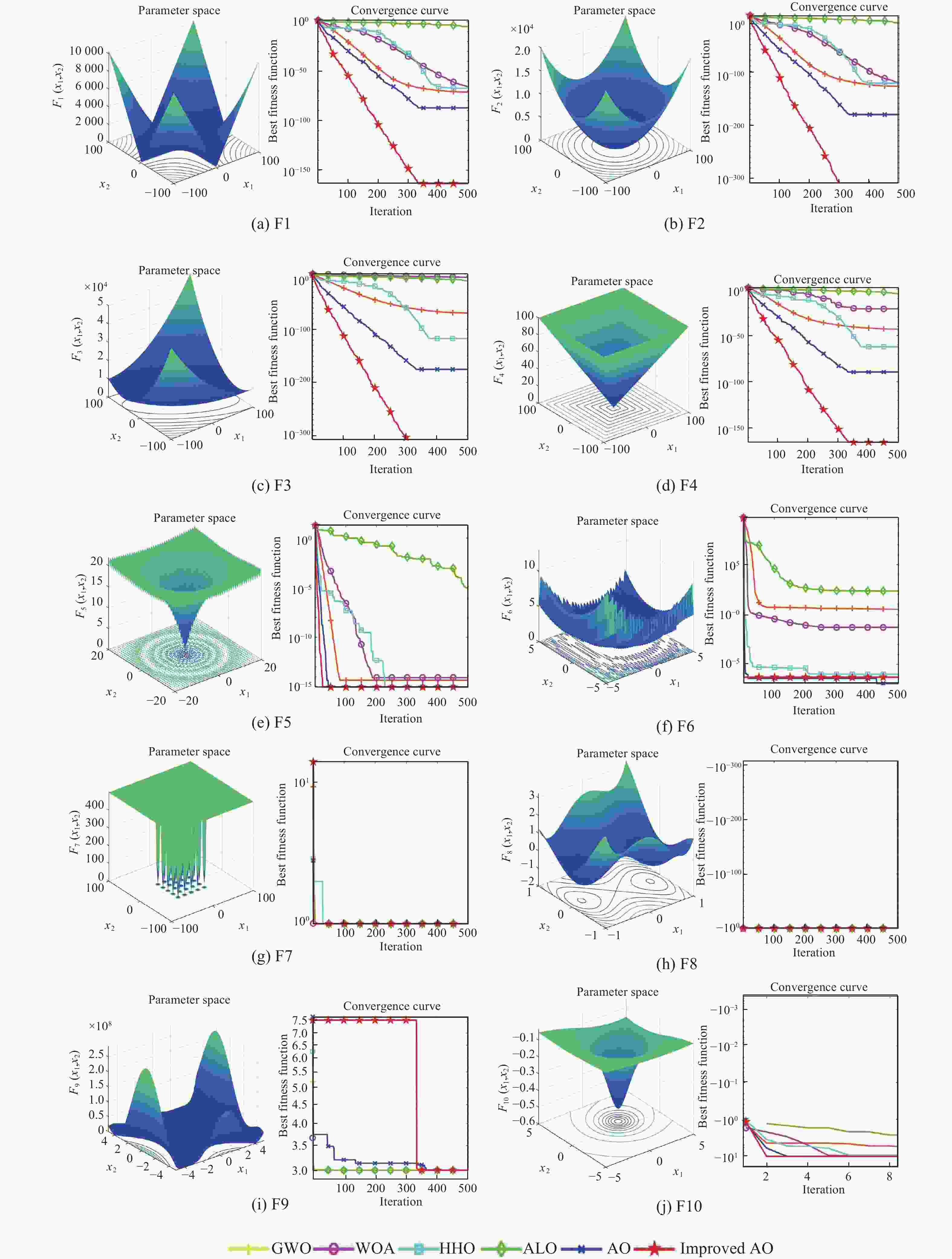
图 5 基准函数图像和算法收敛曲线对比
Figure 5. Benchmark function graphs and comparison of algorithm convergence curves
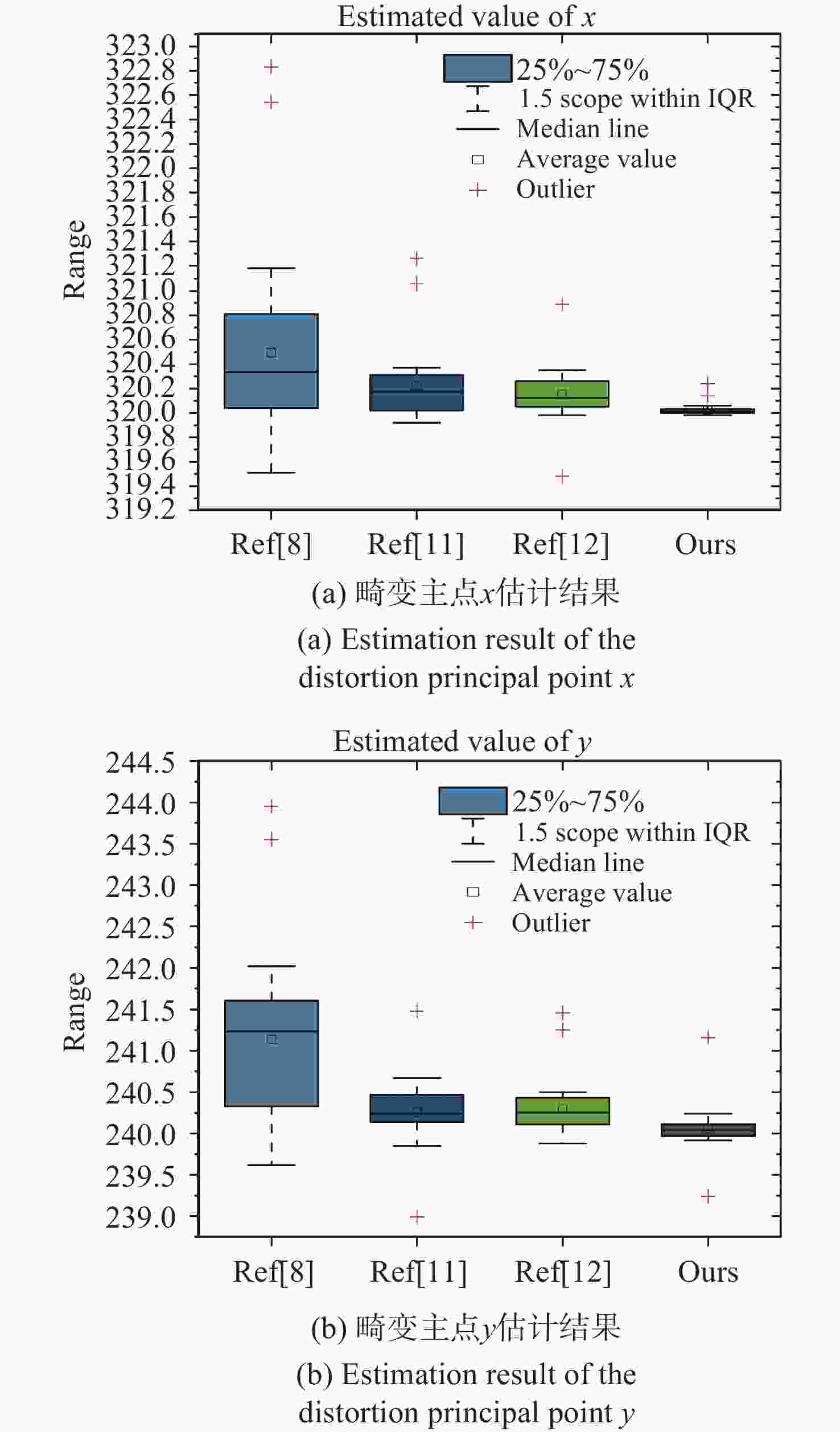
图 6 畸变主点估计结果箱线图
Figure 6. Boxplot of the results of the distortion principal point estimation.
表 2 基准测试函数
Table 2. Benchmark function
函数序号 函数名称 维度 范围 最优值 F1 Sphere 30 [−100,100] 0 F2 Schwefel 2.22 30 [−10,10] 0 F3 Schwefel 1.2 30 [−100,100] 0 F4 Schwefel 2.21 30 [−100,100] 0 F5 Ackley 10 [−32,32] 0 F6 Generalized Penalized 30 [−50,50] 0 F7 Shekel's Foxholes 2 [−65.536,65.536] 1 F8 Six-Hump Camel-Back 4 [−5,5] − 1.0316 F9 Goldstein-Price 2 [−2,2] 3 F10 Shekel's Family 4 [0,1] − 10.4028  下载: 导出CSV
下载: 导出CSV
表 3 不同算法对基准测试函数的寻优结果
Table 3. Optimization results of different algorithms for benchmark functions
函数 GWO WOA HHO ALO AO Improved AO F1 AVG 1.40×10−127 7.91×10−121 4.76×10−117 2.67×10−10 3.71×10−174 3.95×10−323 STD 6.08×10−127 2.45×10−120 2.21×10−116 1.24×10−10 0.00 0.00 Best 5.36×10−135 1.12×10−127 2.56×10−129 9.62×10−11 9.38×10−182 0.00 F2 AVG 2.31×10−71 4.86×10−66 6.93×10−65 1.94×10−5 7.45×10−88 5.37×10−166 STD 6.58×10−71 2.58×10−65 2.29×10−64 4.16×10−5 2.29×10−87 0.00 Best 3.10×10−74 6.20×10−73 1.69×10−75 5.99×10−6 4.82×10−94 1.17×10−174 F3 AVG 2.76×10−67 1.17×10−2 2.11×10−106 2.53×10−9 1.13×10−170 0.00 STD 6.84×10−67 2.78×10−2 1.16×10−105 1.27×10−9 0.00 0.00 Best 1.91×10−74 3.49×10−6 1.89×10−123 3.96×10−10 5.12×10−181 0.00 F4 AVG 6.10×10−44 2.27×10−9 2.90×10−58 1.54×10−5 6.46×10−88 8.25×10−166 STD 1.49×10−43 7.34×10−9 1.11×10−57 2.98×10−6 2.33×10−87 0.00 Best 1.01×10−47 3.01×10−25 1.68×10−64 1.06×10−5 7.89×10−95 2.23×10−182 F5 AVG 4.00×10−15 2.46×10−15 4.44×10−16 5.49×10−2 4.44×10−16 4.44×10−16 STD 0.00 2.02×10−15 0.00 3.01×10−1 0.00 0.00 Best 4.00×10−15 4.44×10−16 4.44×10−16 3.63×10−6 4.44×10−16 4.44×10−16 F6 AVG 3.00 3.39×10−2 4.18×10−7 2.16×102 1.44×10−7 2.37×10−4 STD 4.72×10−1 3.06×10−2 6.39×10−7 1.72×101 2.16×10−7 4.32×10−4 Best 2.08 9.24×10−3 1.19×10−11 1.83×102 4.47×10−11 1.18×10−8 F7 AVG 9.98×10−1 9.98×10−1 9.98×10−1 9.98×10−1 9.98×10−1 9.98×10−1 STD 1.13×10−11 8.48×10−15 1.04×10−15 2.31×10−16 8.48×10−11 3.92×10−9 Best 9.98×10−1 9.98×10−1 9.98×10−1 9.98×10−1 9.98×10−1 9.98×10−1 F8 AVG −1.03 −1.03 −1.03 −1.03 −1.03 −1.03 STD 1.01×10−9 7.23×10−15 4.25×10−16 8.87×10−15 5.38×10−6 2.44×10−4 Best −1.03 −1.03 −1.03 −1.03 −1.03 −1.03 F9 AVG 2.99 3.00 2.98 2.98 3.00 3.00 STD 1.71×10−7 1.00×10−9 3.01×10−14 4.99×10−14 3.24×10−4 6.16×10−15 Best 2.99 3.00 2.98 2.98 3.00 3.00 F10 AVG −1.02×101 −1.04×101 −6.86 −9.35 −1.04×101 −1.04×101 STD 9.70×10−1 8.75×10−7 2.55 2.15 5.73×10−5 3.22×10−2 Best −1.04×101 −1.04×101 −1.04×101 −1.04×101 −1.04×101 −1.04×101
下载: 导出CSV
表 4 Wilcoxon秩和检验结果
Table 4. Wilcoxon rank sum test result
对比算法 单峰函数 多峰函数 固定维数多峰函数 Improved AO vs. GWO 6.39×10−4 2.86×10−2 1.19×10−2 Improved AO vs. WOA 2.48×10−4 6.43×10−2 7.80×10−3 Improved AO vs. HHO 1.55×10−3 6.26×10−2 3.97×10−3 Improved AO vs. ALO 1.00×10−5 2.86×10−2 7.80×10−3 Improved AO vs. AO 9.58×10−3 7.62×10−2 5.69×10−2
下载: 导出CSV
表 5 改进AO算法种群数量(N)的敏感性分析
Table 5. Sensitivity analysis of the improved AO for the number of population members (N)
函数 种群数量值 100 200 300 400 F1 0.00 0.00 0.00 0.00 F2 5.13×10−167 1.16×10−167 7.23×10−171 3.09×10−176 F3 0.00 0.00 0.00 0.00 F4 3.87×10−181 3.87×10−187 5.83×10−195 0.00 F5 4.44×10−16 4.44×10−16 3.45×10−18 1.12×10−21 F6 1.49×10−5 1.35×10−6 2.58×10−6 2.33×10−7 F7 9.98×10−1 9.98×10−1 9.98×10−1 9.98×10−1 F8 −1.03 −1.03 −1.03 −1.03 F9 3.02 3.02 3.01 3.01 F10 −1.04×10−1 −1.04×10−1 −1.04×10−1 −1.04×10−1
下载: 导出CSV
表 6 改进AO算法迭代次数(T)的敏感性分析
Table 6. Sensitivity analysis of the improved AO for the number of iterations (T)
函数 最大迭代次数 200 400 600 800 F1 1.68×10−225 0.00 0.00 0.00 F2 5.67×10−108 3.64×10−145 1.52×10−167 6.26×10−170 F3 2.28×10−217 0.00 0.00 0.00 F4 5.91×10−109 5.61×10−159 5.85×10−165 2.99×10−168 F5 4.44×10−16 4.44×10−16 3.25×10−17 1.93×10−17 F6 3.93×10−5 1.79×10−5 1.45×10−6 9.95×10−7 F7 9.98×10−1 9.98×10−1 9.98×10−1 9.98×10−1 F8 −1.03 −1.03 −1.03 −1.03 F9 3.01 3.01 3.01 3.01 F10 −1.04×10−1 −1.04×10−1 −1.04×10−1 −1.04×10−1
下载: 导出CSV
表 7 径向畸变参数估计结果
Table 7. Radial distortion parameter estimation results
序列 Ref [8] Ref [11] Ref [12] Ours (a) −1.03×10−5 −1.01×10−5 −1.01×10−5 −1.01×10−5 (b) −1.02×10−6 −1.02×10−6 −1.02×10−6 −1.02×10−6 (c) −1.05×10−7 −0.96×10−7 −0.97×10−7 −1.02×10−7 (d) −1.07×10−8 −1.04×10−8 −1.04×10−8 −1.02×10−8 (e) −1.02×10−6 −1.03×10−6 −1.01×10−6 −1.01×10−6 (f) −1.02×10−5 −1.01×10−5 −1.01×10−5 −1.01×10−5
下载: 导出CSV
表 9 全景图像畸变参数估计结果
Table 9. Omnidirectional image distortion parameter estimation results
序列 图像大小 畸变参数 畸变中心 10 (a) $2\;048 \times 1\;536$ 2.2613 ×10−6( 1091.72 ,695.14)10 (b) $2\;048 \times 1\;536$ 2.1983 ×10−6( 1095.62 ,692.57)10 (c) $2\;048 \times 1\;536$ 2.3564 ×10−6( 1096.34 ,695.83)10 (d) $2\;048 \times 1\;536$ 2.2083 ×10−6( 1094.61 ,696.53)10 (e) $4\;352 \times 3\;264$ 3.2517 ×10−6(517.86,382.15) 10 (f) $4\;352 \times 3\;264$ 2.8476 ×10−6(516.43,380.93)
下载: 导出CSV
-
[1] GONZALEZ-AGUILERA D, GOMEZ-LAHOZ J, RODRÍGUEZ-GONZÁLVEZ P. An automatic approach for radial lens distortion correction from a single image[J]. IEEE Sensors Journal, 2011, 11(4): 956-965. doi: 10.1109/JSEN.2010.2076403 [2] BORN M, WOLF E. Electromagnetic theory of propagation, interference and diffraction of light[J]. Principles of Optics, 1980, 6: 327-329. [3] XIANG H T, TIAN L. Method for automatic georeferencing aerial remote sensing (RS) images from an unmanned aerial vehicle (UAV) platform[J]. Biosystems Engineering, 2011, 108(2): 104-113. doi: 10.1016/j.biosystemseng.2010.11.003 [4] 黄军辉, 王昭, 薛琦, 等. 基于有理函数式镜头畸变模型的摄像机标定[J]. 中国激光,2014,41(5):0508001. doi: 10.3788/CJL201441.0508001HUANG J H, WANG ZH, XUE Q, et al. Calibration of camera with rational function lens distortion model[J]. Chinese Journal of Lasers, 2014, 41(5): 0508001. (in Chinese). doi: 10.3788/CJL201441.0508001 [5] TSAI R. A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the-shelf TV cameras and lenses[J]. IEEE Journal on Robotics and Automation, 1987, 3(4): 323-344. doi: 10.1109/JRA.1987.1087109 [6] ZHANG ZH Y. A flexible new technique for camera calibration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(11): 1330-1334. doi: 10.1109/34.888718 [7] WU F L, WEI H, WANG X J. Correction of image radial distortion based on division model[J]. Optical Engineering, 2017, 56(1): 013108. doi: 10.1117/1.OE.56.1.013108 [8] ASARI K V, KUMAR S, RADHAKRISHNAN D. A new approach for nonlinear distortion correction in endoscopic images based on least squares estimation[J]. IEEE Transactions on Medical Imaging, 1999, 18(4): 345-354. doi: 10.1109/42.768843 [9] DEVERNAY F, FAUGERAS O. Straight lines have to be straight: automatic calibration and removal of distortion from scenes of structured enviroments[J]. Machine Vision and Applications, 2001, 13(1): 14-24. doi: 10.1007/PL00013269 [10] ALVAREZ L, GÓMEZ L, SENDRA J R. An algebraic approach to lens distortion by line rectification[J]. Journal of Mathematical Imaging and Vision, 2009, 35(1): 36-50. doi: 10.1007/s10851-009-0153-2 [11] 周前飞, 刘晶红. 航空变焦距镜头非线性畸变快速校正方法[J]. 光学学报,2015,35(4):0411001. doi: 10.3788/AOS201535.0411001ZHOU Q F, LIU J H. Rapid nonlinear distortion correction of aerial optical zoom lens system[J]. Acta Optica Sinica, 2015, 35(4): 0411001. (in Chinese). doi: 10.3788/AOS201535.0411001 [12] 王平, 姚登银, 谯睿, 等. 基于双直线的镜头畸变参数估计方法[J]. 光学学报,2023,43(13):1315001. doi: 10.3788/AOS221724WANG P, YAO D Y, QIAO R, et al. Estimation method of lens distortion parameters based on two lines[J]. Acta Optica Sinica, 2023, 43(13): 1315001. (in Chinese). doi: 10.3788/AOS221724 [13] MICUSIK B, PAJDLA T. Estimation of omnidirectional camera model from epipolar geometry[C]. Proceedings of 2003 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, IEEE, 2003. [14] 曹立波, 夏家豪, 廖家才, 等. 基于3D空间球面的车载全景快速生成方法[J]. 中国公路学报,2020,33(1):153-162,171. doi: 10.3969/j.issn.1001-7372.2020.01.016CAO L B, XIA J H, LIAO J C, et al. Fast generation methods of around view monitoring images for automobiles based on 3D space sphere[J]. China Journal of Highway and Transport, 2020, 33(1): 153-162,171. (in Chinese). doi: 10.3969/j.issn.1001-7372.2020.01.016 [15] LIAO K, LIN CH Y, ZHAO Y, et al. OIDC-Net: omnidirectional image distortion correction via coarse-to-fine region attention[J]. IEEE Journal of Selected Topics in Signal Processing, 2020, 14(1): 222-231. doi: 10.1109/JSTSP.2019.2955017 [16] FENG H, WANG W D, DENG J J, et al. SimFIR: a simple framework for fisheye image rectification with self-supervised representation learning[C]. Proceedings of 2023 IEEE/CVF International Conference on Computer Vision, IEEE, 2023: 12418-12427. [17] ARTIZZU C O, ALLIBERT G, DEMONCEAUX C. OMNI-CONV: generalization of the omnidirectional distortion-aware convolutions[J]. Journal of Imaging, 2023, 9(2): 29. doi: 10.3390/jimaging9020029 [18] ABUALIGAH L, YOUSRI D, ABD ELAZIZ M, et al. Aquila optimizer: a novel meta-heuristic optimization algorithm[J]. Computers & Industrial Engineering, 2021, 157: 107250. [19] ZHANG Y, XU X P, ZHANG N, et al. Adaptive aquila optimizer combining niche thought with dispersed chaotic swarm[J]. Sensors, 2023, 23(2): 755. doi: 10.3390/s23020755 [20] 林之博, 刘媛华. 一种分片混沌贪婪振荡退火TSP优化算法[J]. 计算机应用研究,2021,38(8):2359-2364.LIN ZH B, LIU Y H. Divided chaotic oscillatory annealing TSP optimization algorithm based on greedy strategy[J]. Application Research of Computers, 2021, 38(8): 2359-2364. (in Chinese). [21] 鲁英达, 张菁. 基于改进猎人猎物算法的VMD-KELM短期负荷预测[J]. 电气工程学报,2023,18(4):228-238.LU Y D, ZHANG J. VMD-KELM short-term load forecasting based on improved hunter-prey optimizer[J]. Journal of Electrical Engineering, 2023, 18(4): 228-238. (in Chinese). [22] 张越, 张宁, 徐熙平, 等. 融合结构光的折反射全景单目视觉测距[J]. 光学 精密工程,2024,32(4):490-503. doi: 10.37188/OPE.20243204.0490ZHANG Y, ZHANG N, XU X P, et al. Catadioptric omnidirectional monocular visual distance measurement method integrating structured light[J]. Optics and Precision Engineering, 2024, 32(4): 490-503. (in Chinese). doi: 10.37188/OPE.20243204.0490 [23] MEI C, RIVES P. Single view point omnidirectional camera calibration from planar grids[C]. Proceedings 2007 IEEE International Conference on Robotics and Automation, IEEE, 2007: 3945-3950. [24] STRAND R, HAYMAN E. Correcting radial distortion by circle fitting[C]. Proceedings of the British Machine Vision Conference 2005, BMVC, 2005: 2564-2570. [25] WANG A Q, QIU T SH, SHAO L T. A simple method of radial distortion correction with centre of distortion estimation[J]. Journal of Mathematical Imaging and Vision, 2009, 35(3): 165-172. doi: 10.1007/s10851-009-0162-1 [26] MIRJALILI S, MIRJALILI S M, LEWIS A. Grey wolf optimizer[J]. Advances in Engineering Software, 2014, 69: 46-61. doi: 10.1016/j.advengsoft.2013.12.007 [27] MIRJALILI S, LEWIS A. The whale optimization algorithm[J]. Advances in Engineering Software, 2016, 95: 51-67. doi: 10.1016/j.advengsoft.2016.01.008 [28] HEIDARI A A, MIRJALILI S, FARIS H, et al. Harris hawks optimization: algorithm and applications[J]. Future Generation Computer Systems, 2019, 97: 849-872. doi: 10.1016/j.future.2019.02.028 [29] MIRJALILI S. The ant lion optimizer[J]. Advances in Engineering Software, 2015, 83: 80-98. doi: 10.1016/j.advengsoft.2015.01.010 [30] BUKHARI F, DAILEY M N. Automatic radial distortion estimation from a single image[J]. Journal of Mathematical Imaging and Vision, 2013, 45(1): 31-45. doi: 10.1007/s10851-012-0342-2 -

 下载:
下载:











计量
- 文章访问数: 607
- HTML全文浏览量: 330
- PDF下载量: 103
- 被引次数: 0
