


Optimizing structural parameters of electrowetting triple-liquid lens based on joint simulation technology
-
摘要:
电润湿三液体透镜具有优秀的变焦性能,但其结构复杂度和设计难度较大,因此,本文提出了一种基于联合仿真的电润湿三液体透镜结构参数优选方法。在设计某三液体透镜时,利用Comsol和Zemax软件建立了不同结构参数下的三液体透镜仿真模型,得到了其在不同电压下的焦距,分析了高度和锥度对变焦范围和初始焦距的影响,确定了变焦范围最大且初始焦距最长的一组结构参数。为了验证该方法的可靠性,制备了不同高度和锥度的三液体透镜模型,并进行变焦实验。仿真与实验结果表明:三液体透镜的初始焦距与高度和锥度正相关;变焦范围与锥度正相关,但高度为主要影响因素;当高度为12 mm,锥度为20°时,透镜变焦范围最大,初始焦距最长。当锥度小于15°时,仿真与实验结果的吻合度较高。
Abstract:The electrowetting triple-liquid lens has excellent zoom performance, but its structural complexity and design difficulty are relatively high. Therefore, we propose a method for optimizing the structural parameters of the electrowetting triple-liquid lens based on joint simulation. To design a triple-liquid lens, Comsol and Zemax software are used to establish triple-liquid lens simulation models under different structural parameters, and its focal lengths under different voltages are obtained. The effects of height and taper on zoom range and initial focal length are analyzed, and a set of structural parameters with the maximum zoom range and the longest initial focal length is determined. To verify the method’s reliability, we prepare the triple-liquid lens models with different heights and tapers, and conduct zoom experiments. The simulation and experimental results show that the initial focal length of the triple-liquid lens correlates positively with height and taper; the zoom range correlates positively with taper, but height is the main influencing factor. When the height is 12 mm and the taper is 20°, the lens has the most extensive zoom range and the longest initial focal length. When the taper is less than 15°, the simulation and experimental results are highly consistent.
-

图 6 仿真初始焦距随(a)高度和(b)锥度的变化关系图
Figure 6. Simulated initial focal length as a function of (a) height and (b) taper
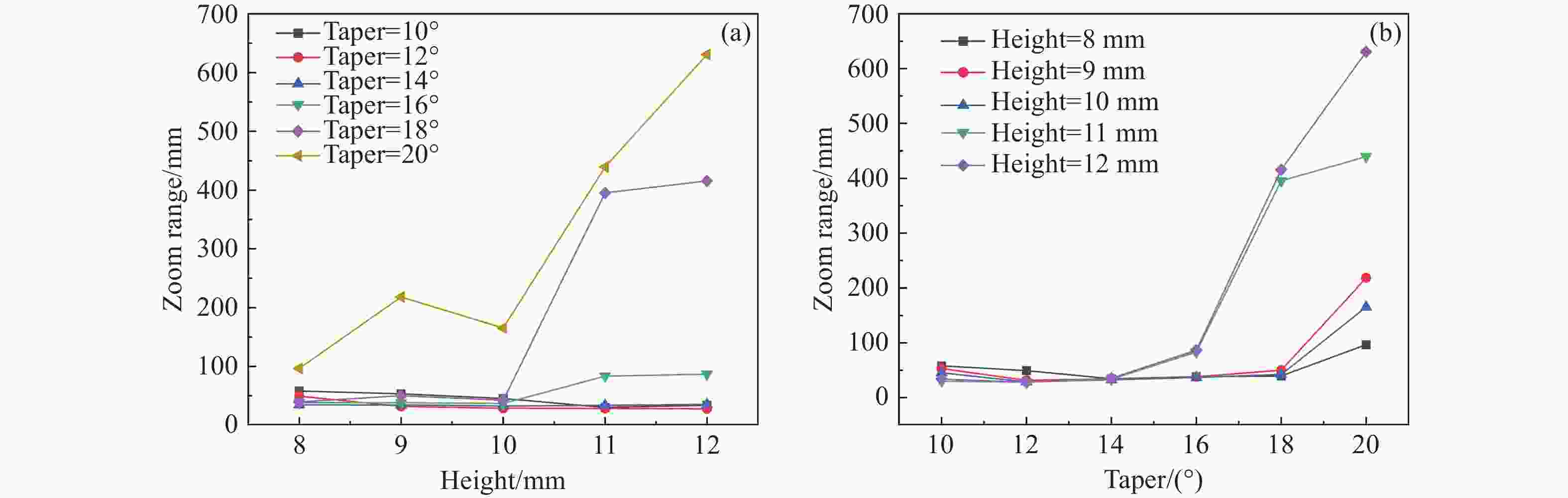
图 7 仿真变焦范围随(a)高度和(b)锥度的变化关系图
Figure 7. Diagrams of simulated zoom range as a function of (a) height and (b) taper
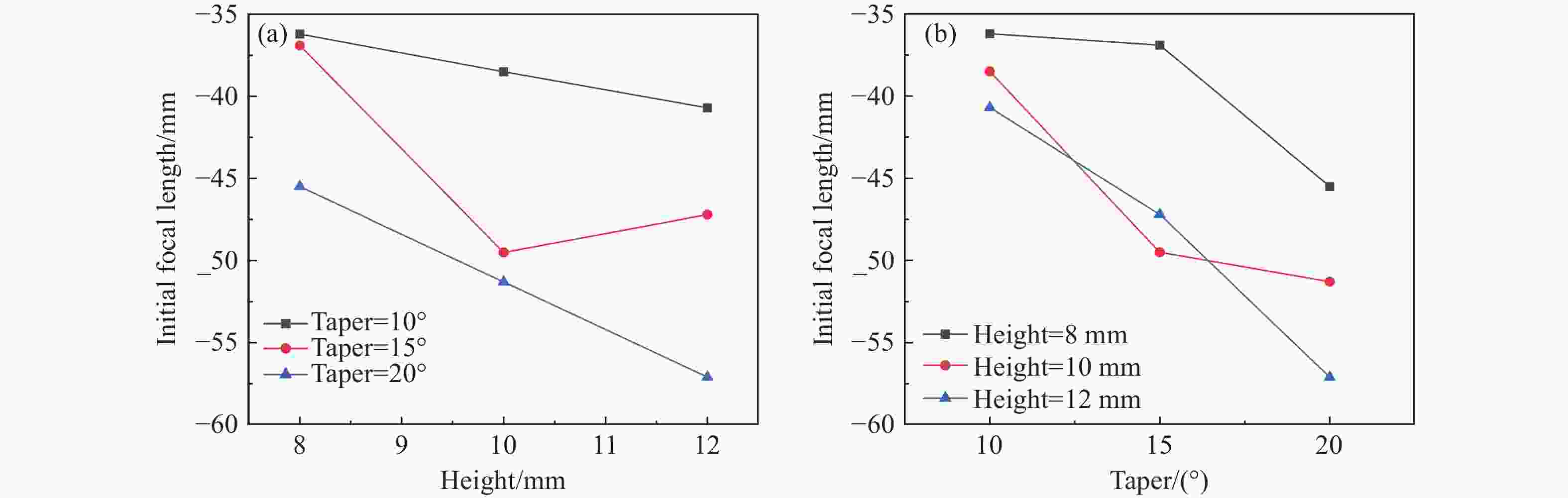
图 11 初始焦距随(a)高度和(b)锥度的变化关系图
Figure 11. Diagrams of initial focal length as a function of (a) height and (b) taper
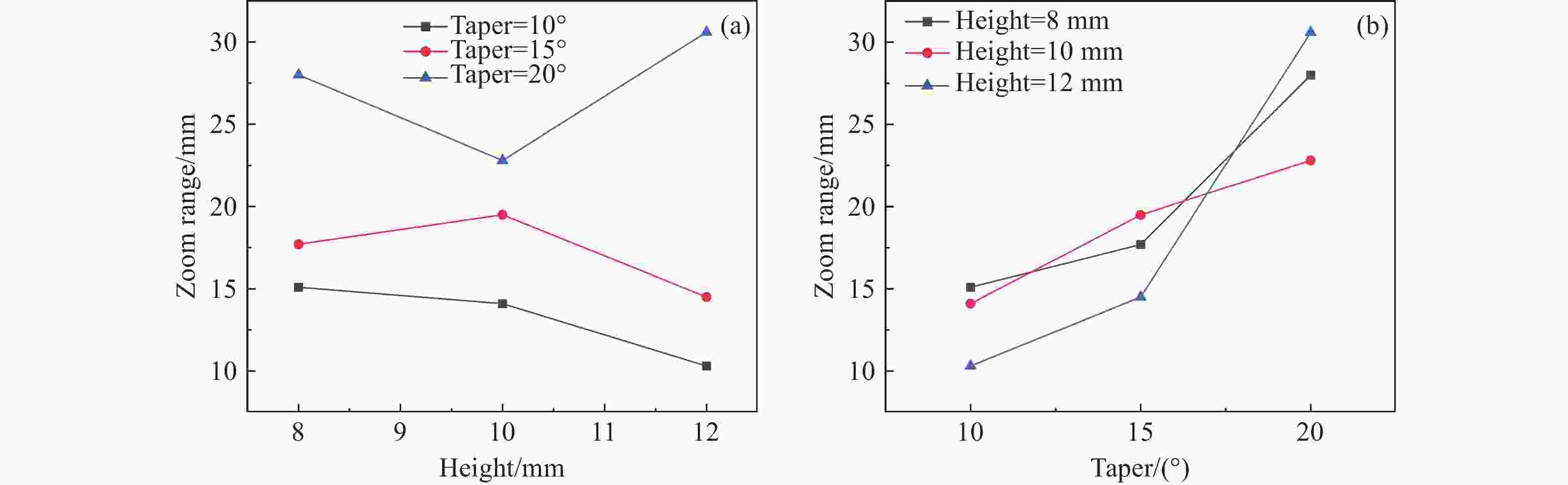
图 12 变焦范围随(a)高度和(b)锥度的变化关系图
Figure 12. Diagrams of zoom range as a function of (a) height and (b) taper
表 1 参数设置
Table 1. Parameter settings
Parameter Value Remark $ {\gamma }_{1} $/N·m−1 0.05 Surface tension1
([EMIm][NTf2]&C12H25Br)$ {\gamma }_{2} $/N·m−1 0.069 Surface tension2
(C12H25Br&1%SDS)$ \varepsilon $ 3.15 Relative dielectric constant $ {\theta }_{0} $/° 80 Zero voltage contact angle
([EMIm][NTf2]&C12H25Br)$ {\theta }_{1} $/° 65 Zero voltage contact angle
(C12H25Br&1%SDS)$ d $/μm 8 Dielectric thickness  下载: 导出CSV
下载: 导出CSV
表 2 液体参数设置
Table 2. Liquid parameter settings
Liquid Density/kg·m−3 Refractive index Viscosity/10−3Pa·s [EMIm][NTf2] 1380 1.4227 32.00 C12H25Br 1039 1.458 3.60 1%SDS 1000 1.335 2.70
下载: 导出CSV
表 3 偶次非球面系数
Table 3. Even aspherical coefficients
Even asphere b c d e Lower interface
Upper interface0.099
0.1060.001
0.0020
00
0
下载: 导出CSV
表 4 系统的结构参数
Table 4. Structural parameters of proposed system
Surface Type Radius Thickness Glass Semi-
diameterOBJ Standard Infinity Infinity 0 STO Standard Infinity 0.5 K9 2 2 Standard Infinity 2.3 Conductive liquid1 2 3 Even asphere Infinity 2.4 Insulating liquid 2 4 Even asphere Infinity 3.3 Conductive liquid2 2 5 Standard Infinity 0.5 K9 2 6 Standard Infinity 20 K9 2 IMA Standard Infinity - 4
下载: 导出CSV
表 5 三液体透镜零件参数值
Table 5. Parameter values of the triple-liquid lens component
Height/mm Taper/° Label 8 10 L1 15 L2 20 L3 10 10 L4 15 L5 20 L6 12 10 L7 15 L8 20 L9
下载: 导出CSV
表 6 实验数据表
Table 6. Experimental data
Number Initial focal length
/mmDrive voltage
/VThreshold voltage
/VL1 −36.2 60 120 L2 −36.9 60 120 L3 −45.5 60 120 L4 −38.5 60 120 L5 −49.5 60 120 L6 −51.3 80 140 L7 −40.7 80 140 L8 −47.2 80 140 L9 −57.1 80 140
下载: 导出CSV
-
[1] 王潇枫, 石岩, 庄一, 等. 变焦结构光成像系统的光学设计[J]. 应用光学,2018,39(1):22-27.WANG X F, SHI Y, ZHUANG Y, et al. Optical design of zoom structured light imaging system[J]. Journal of Applied Optics, 2018, 39(1): 22-27. (in Chinese). [2] 黄翔, 林四英, 谷丹丹, 等. 液体变焦镜头的研究进展[J]. 中国光学,2019,12(6):1179-1194. doi: 10.3788/co.20191206.1179HUANG X, LIN S Y, GU D D, et al. Review on progress of variable-focus liquid lens[J]. Chinese Optics, 2019, 12(6): 1179-1194. (in Chinese). doi: 10.3788/co.20191206.1179 [3] 王琼华, 李磊. 基于自适应透镜的光学成像系统[J]. 光电子技术,2020,40(3):155-163.WANG Q H, LI L. Optical imaging system based on adaptive lens[J]. Optoelectronic Technology, 2020, 40(3): 155-163. (in Chinese). [4] 张鑫, 蒋世磊, 赵金, 等. 电润湿液体透镜变焦光学系统设计[J]. 光学与光电技术,2024,22(1):90-95. doi: 10.3969/j.issn.1672-3392.2024.1.gxygdjs202401012ZHANG X, JIANG SH L, ZHAO J, et al. Design of zoom optical system with electorwetting liquid lens[J]. Optics & Optoelectronic Technology, 2024, 22(1): 90-95. (in Chinese). doi: 10.3969/j.issn.1672-3392.2024.1.gxygdjs202401012 [5] 董健, 王春艳, 孙昊, 等. 腹腔镜用液体透镜变焦光学系统设计研究[J]. 中国激光,2023,50(21):2107204. doi: 10.3788/CJL231015DONG J, WANG CH Y, SUN H, et al. Design and study of liquid lens zoom optical system for laparoscopy[J]. Chinese Journal of Lasers, 2023, 50(21): 2107204. (in Chinese). doi: 10.3788/CJL231015 [6] CHENG Y, CAO J, TANG X, et al. Optical zoom imaging systems using adaptive liquid lenses[J]. Bioinspiration & Biomimetics, 2021, 16(4): 041002. [7] XU J B, ZHAO Y R, LIU CH, et al. Triple-layer spherical electrowetting liquid lens with large-aperture and high zoom ratio[J]. Optics and Lasers in Engineering, 2023, 160: 107311. doi: 10.1016/j.optlaseng.2022.107311 [8] 赵瑞, 马建权, 党智勇, 等. 基于介电润湿三液体透镜的变焦光学系统的设计与分析[J]. 光子学报,2017,46(6):622005. doi: 10.3788/gzxb20174606.0622005ZHAO R, MA J Q, DANG ZH Y, et al. Design and analysis of an optical zoom system using electrowetting-based triple liquid lens[J]. Acta Photonica Sinica, 2017, 46(6): 622005. (in Chinese). doi: 10.3788/gzxb20174606.0622005 [9] 赵瑞, 陈露楠, 孔梅梅, 等. 用于波前补偿的三液体透镜阵列的设计分析[J]. 激光与光电子学进展,2020,57(21):212202.ZHAO R, CHEN L N, KONG M M, et al. Design and analysis of triple liquid lens array for wavefront compensation[J]. Laser & Optoelectronics Progress, 2020, 57(21): 212202. (in Chinese). [10] SONG X M, ZHANG H X, LI D Y, et al. Electrowetting lens with large aperture and focal length tunability[J]. Scientific Reports, 2020, 10(1): 16318. doi: 10.1038/s41598-020-73260-4 [11] 程阳, 曹杰, 王营博, 等. 介电弹性体驱动液体透镜的设计与分析[J]. 光学学报,2021,41(5):0522004. doi: 10.3788/AOS202141.0522004CHENG Y, CAO J, WANG Y B, et al. Design and analysis of liquid lens driven by dielectric elastomer[J]. Acta Optica Sinica, 2021, 41(5): 0522004. (in Chinese). doi: 10.3788/AOS202141.0522004 [12] SONG X M, ZHANG H X, ZHANG Z L, et al. Design and characteristics of a Maxwell force-driven liquid lens[J]. Optics Express, 2021, 29(6): 8323-8332. doi: 10.1364/OE.418630 [13] ZHAO P P, LI Y, ZAPPE H. Accelerated electrowetting-based tunable fluidic lenses[J]. Optics Express, 2021, 29(10): 15733-15746. doi: 10.1364/OE.423460 [14] 徐荣青, 孔梅梅, 张宏超, 等. 减少电润湿液体透镜变焦时间的实验研究[J]. 光学学报,2020,40(13):1322003. doi: 10.3788/AOS202040.1322003XU R Q, KONG M M, ZHANG H CH, et al. Experimental research on reducing zoom time of electrowetting liquid lenses[J]. Acta Optica Sinica, 2020, 40(13): 1322003. (in Chinese). doi: 10.3788/AOS202040.1322003 [15] 黄鹏, 杨晓营, 陈彬, 等. 电润湿透镜重复变焦精度指标及其优化方法[J]. 中国光学(中英文),2023,16(4):868-877. doi: 10.37188/CO.2022-0209HUANG P, YANG X Y, CHEN B, et al. Repeated zoom accuracy index of an electrowetting lens and its optimization method[J]. Chinese Optics, 2023, 16(4): 868-877. (in Chinese). doi: 10.37188/CO.2022-0209 [16] LIM W Y, SUPEKAR O D, ZOHRABI M, et al. Liquid combination with high refractive index contrast and fast scanning speeds for electrowetting adaptive optics[J]. Langmuir, 2018, 34(48): 14511-14518. doi: 10.1021/acs.langmuir.8b02849 [17] WANG D Y, HU D G, ZHOU Y W, et al. Design and fabrication of a focus-tunable liquid cylindrical lens based on electrowetting[J]. Optics Express, 2022, 30(26): 47430-47439. doi: 10.1364/OE.478130 [18] 孔梅梅, 潘世成, 袁东, 等. 方腔结构非球面液体透镜的设计与分析[J]. 激光与光电子学进展,2023,60(21):2122005.KONG M M, PAN SH CH, YUAN D, et al. Design and analysis of aspheric liquid lens with square cavity structure[J]. Laser & Optoelectronics Progress, 2023, 60(21): 2122005. (in Chinese). [19] 孔梅梅, 董媛, 徐春生, 等. 基于平板电极的非球面组合液体透镜的仿真与实验分析[J]. 光学学报,2024,44(8):0823002. doi: 10.3788/AOS231775KONG M M, DONG Y, XU CH SH, et al. Simulation and experimental analysis of aspherical combined liquid lens based on flat electrode[J]. Acta Optica Sinica, 2024, 44(8): 0823002. (in Chinese). doi: 10.3788/AOS231775 [20] 孔梅梅, 董媛, 徐春生, 等. 基于平行平板电极的非球面双液体透镜的仿真与实验分析[J]. 物理学报,2023,72(24):244203. doi: 10.7498/aps.72.20230994KONG M M, DONG Y, XU CH SH, et al. Simulation and experimental analysis of aspherical double-liquid lens based on parallel plate electrode[J]. Acta Physica Sinica, 2023, 72(24): 244203. (in Chinese). doi: 10.7498/aps.72.20230994 [21] 马小超. 自动焦度计使用注意事项及部分项目的自测方法[J]. 中国计量,2023(9):102-104,119.MA X CH. Precautions for using the automatic lensmeter and self-testing methods for some items[J]. China Metrology, 2023(9): 102-104,119. (in Chinese) [22] 李中杨, 马国鹭, 曾国英. 液态金属汞在硅片表面的润湿行为研究[J]. 真空科学与技术学报,2018,38(9):817-820.LI ZH Y, MA G L, ZENG G Y. Study on wetting behavior of liquid mercury droplet on silicon wafer surface[J]. Chinese Journal of Vacuum Science and Technology, 2018, 38(9): 817-820. (in Chinese). -

 下载:
下载:















计量
- 文章访问数: 238
- HTML全文浏览量: 117
- PDF下载量: 73
- 被引次数: 0
