


Review of the development of laser active imaging system with direct ranging
-
摘要: 对直接测距型激光主动成像系统进行了深入研究。按照工作方式分类介绍了国外相关研究机构激光主动成像系统的工作原理及系统参数, 归纳总结并比较分析了各工作方式的优缺点。分析认为:基于单点或小面阵探测器配合光机扫描方案可实现较远作用距离, 但其对激光器重频要求较高, 后续数据处理复杂, 且系统体积、功耗较大;而基于Flash探测器的激光主动成像系统易于实现小型化, 对激光器重频要求较低。作用距离受限问题可通过电子扫描得以有效解决。在具体应用时, 需根据实际需求, 综合考虑系统体积、质量、功耗、激光器输出峰值功率及脉冲重复频率、所能获取的探测器类型、后续数据处理能力等多种因素折衷选取。Abstract: Laser active imaging system has been used in many fields due to its high precision of angular, range and velocity, so laser active imaging system with direct ranging are researched deeply. According to the operational mode, principle and systemic parameter of many laser active imaging systems from several overseas research institutes are introduced. The advantages and shortcomings of those operational modes are summarized and compared. Analyzing result shows that long operational range could be gained with single or small FPA combining optical-mechanical scanning. But the repeated- frequency of laser would be high and post data-processing is complicated with this method. The volume and power dissipation is also considerable. Compact laser active imaging system could be achieved easily with flash sensor and related repeated-frequency of laser is low. Although operational range is limited, it could be enhanced by using electronical steering method. In actural system, several factors, such as volume, weight and power dissipation of system, peak power and repeated frequency of laser, type of sensor and post data-processing capability, should be taken into account comprehensively to reach a comprise.
-

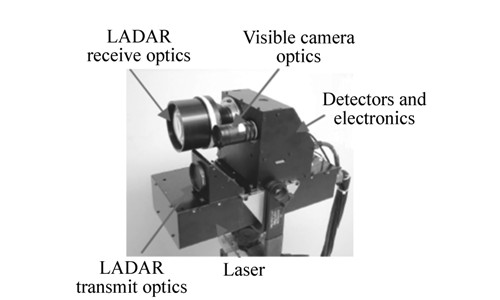
图 2 OWS系统在Hellas直升机上安装图片
Figure 2. Picture of OWS system installed in Hellas helicopter

图 4 3D-LZ系统在各种模式下获取的目标图像
Figure 4. Target image obtained with 3D-LZ system in several modes

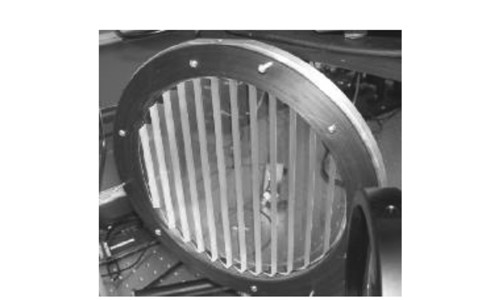
图 6 CZMIL系统设计加工的圆形菲涅耳透镜实物图
Figure 6. Physical image of circular Fresnel prism designed for CZMIL system

图 9 KIDAR- B25系统在精确控制模式下获取的图像
Figure 9. Image gained in precision mode with KIDAR-B25 system

图 10 KIDAR- B25系统在实时控制模式下获取的图像
Figure 10. Image gained in real-time mode with KIDAR-B25 system

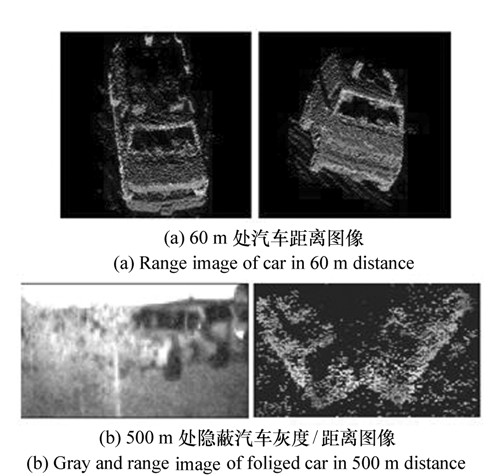
图 14 Gen-Ⅲ系统对500 m坦克照明及距离图像
Figure 14. Illuminating and range image of a tank obtained with Gen-Ⅲ system in 500 m distance

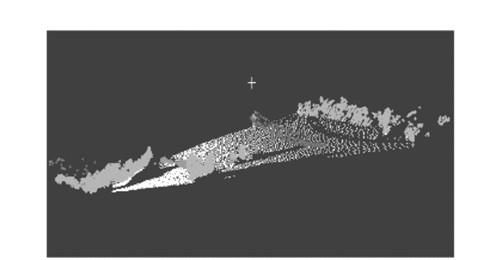
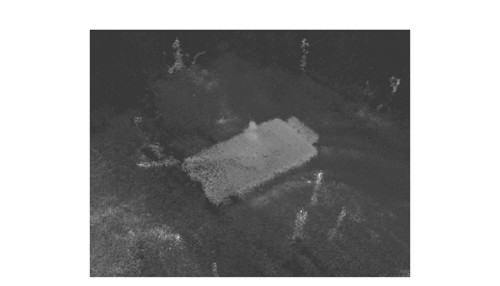
图 16 JIGSAW系统获取的高隐藏目标图像
Figure 16. Highly camouflaged target image gained by JIGSAW system

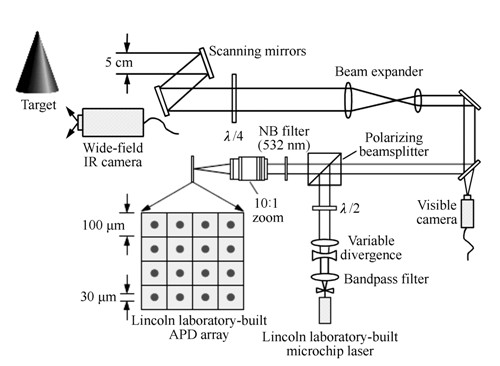
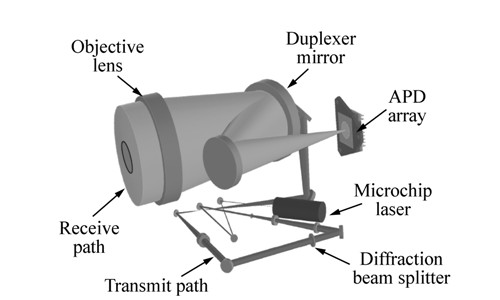
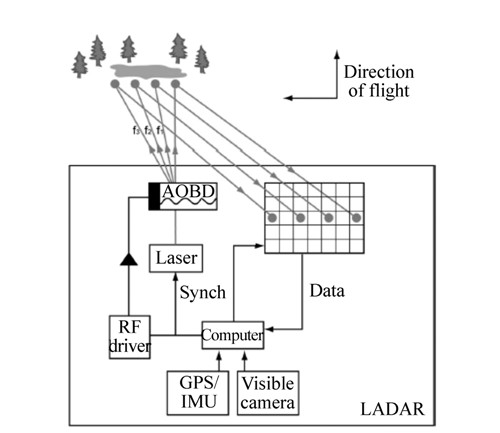
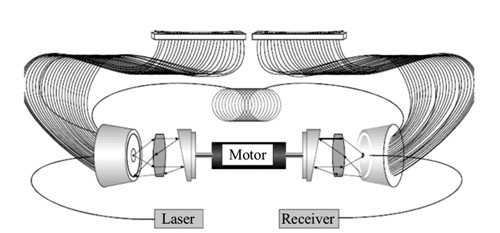
图 17 光纤扫描激光主动成像系统工作原理示意图
Figure 17. Schematic diagram of working principle of optical fiber scanning laser active imaging system

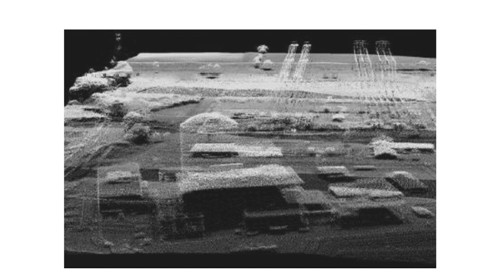
图 19 ASC公司flash LADAR对1 km以外目标所成图像
Figure 19. Image of target beyond 1 km gained by flash LADAR from ASC Corporation

图 20 ASC公司flash LADAR“透视”能力测试
Figure 20. 1 Penetrating performance test of flash LADAR from ASC Corporation

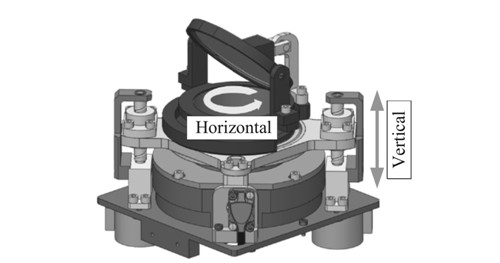
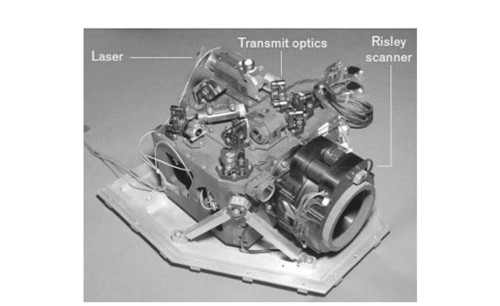
图 21 Ball公司第5代flash LADAR实物图
Figure 21. Physical image of 5th generation flash LADAR from Ball Corporation
表 1 Gen-Ⅰ、Gen-Ⅲ系统和JIGSAW系统指标参数
Table 1. Parameter of Gen-Ⅰ,Gen-Ⅲ and JIGSAW system
Gen-Ⅰ Gen-Ⅲ JIGSAW Laser Passively Q-Switched Nd∶YAG Micro-chip Laser Laser wavelength 532 nm Repeated frequency/kHz 1 5~10 16 Energy per pulse/μJ 30 33 4 Pulse length(FWHM)/ps 380 700 300 Detector 4×4 GM APD 32×32 GM APD Pixel pitch 100 μm Receive aperture diameter/cm 5 7.5 Focal length / 30.0 cm Illuminated way / 32×32 diffraction beam splitter Range resolution/cm / 15 40 Scanning mirror Two single axis Two axis Risley prism Weight / 6 kg /  下载: 导出CSV
下载: 导出CSV
-
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] -

 下载:
下载:










计量
- 文章访问数: 2794
- HTML全文浏览量: 935
- PDF下载量: 885
- 被引次数: 0
