


Three-dimensional shape acquisition method by integral imaging based on corresponding points
-
摘要: 为了实现被动式三维形貌获取技术, 首先利用光线追迹方法从理论上对集成成像阵列式多角度图像获取技术进行了深入分析;对于元素图像阵列中同名像点的间距和三维物点位置之间的关联性进行了理论分析;在此基础上提出了集成成像同名像点三维形貌获取方法。实验结果显示, 本文提出的集成成像同名像点三维形貌获取技术能够获取三维物体的三维形貌和任意三维点的空间坐标。定量实验结果显示获取结果相对误差小于5%, 证实了本文提出的基于集成成像同名像点三维形貌获取技术能够实现三维信息的光学获取。Abstract: In order to realize the passive three-dimensional(3D) shape acquisition technology, the ray tracing is used to analyze the processing of pick-up information by the integral imaging system, and the relationship in the corresponding points is shown under the theoretical analysis. Then, the 3D shape acquisition technology by integral imaging based on the relationship of the corresponding points is proposed. The optical results show that the coordinates of points in the object space can be captured by the proposed technology. The 3D shape can be reconstructed from the corresponding points. The coordinates of the object point can be calculated. The relative error is smaller than 5%. The result confirms the feasibility of our proposed method to realize the acquisition for 3D optical information.
-
Key words:
- integral imaging /
- corresponding points /
- three-dimensional shape
-

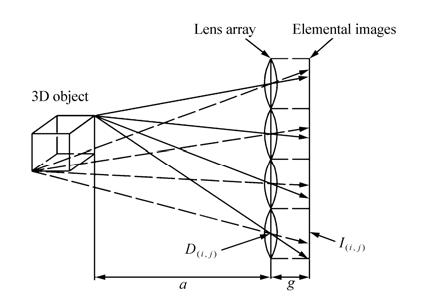
图 1 集成成像三维信息获取原理示意图
Figure 1. Schematic diagram of principle of integral imaging 3D picked-up technology
表 1 集成成像光学获取系统参数
Table 1. Result of system scale calibration
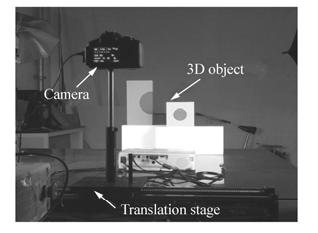
系统参数 g 29 mm p 20 mm 相机 分辨率 720×480 CCD尺寸 22.3 mm×14.9 mm 相机阵列 18列×1行 平移台 精度 0.005 mm 长度 500 mm  下载: 导出CSV
下载: 导出CSV
表 2 光学实验结果
Table 2. Result of the optical experiment
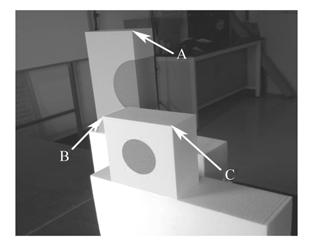
测量值 计算值 相对误差 lAB 265 mm 275 mm 3.8% lBC 140 mm 140 mm 0.0% lAC 360 mm 375 mm 4.2%
下载: 导出CSV
-
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] -

 下载:
下载:



图(6) / 表(2)
计量
- 文章访问数: 2210
- HTML全文浏览量: 530
- PDF下载量: 613
- 被引次数: 0
