


Greenwood frequency measurement of atmospheric turbulence by phase difference method
-
摘要: 为了利用位相差值法实现大气湍流格林伍德频率的准确测量, 研究了位相差值法的有效性、哈特曼探测器采样点数和采样频率的选取方法。首先给出了位相差值法的基本原理和测量噪声去除方法, 然后分析了哈特曼探测器采样点数和格林伍德频率的统计平均次数对测量精度的影响, 结果显示, 当采样点数大于400、统计平均次数大于400时, 可以实现大气湍流格林伍德频率的准确测量。研究了测量噪声的影响, 结果表明:去除噪声后, 测量值的偏离误差从30%降低到0.6%。研究了算法的重复性精度, 得到测量值偏离量的RMS值为1.9 Hz, 占理论值的3%, 说明测量方法非常稳定。依据上述结果, 对8~108 Hz的湍流进行测量和分析, 结果显示, 当不考虑空气扰动时, 测量值与理论值基本一致。最后, 研究了哈特曼探测器采样频率和格林伍德频率之间的关系:哈特曼探测器的采样频率越高, 能够准确测量的格林伍德频率也越高, 并得到了定量的经验公式。上述结果表明, 在满足采样点数、采样频率以及统计平均次数等条件下, 位相差值法可以实现大气湍流格林伍德频率的准确测量。该研究工作为大气湍流的格林伍德频率测量提供了应用依据。Abstract: To measure the Greenwood frequency of the atmospheric turbulence accurately, the validity of phase difference method and the selection of the sampling points and the sampling frequency of the Shack-Hartmann wavefront sensor(S-H WFS) have been studied. Firstly, the principle of the phase difference method and the noise elimination algorithm are given. Secondly, the effects of the sampling points of S-H WFS and the statistical times of Greenwood frequency on the measurement accuracy are investigated. The experimental results show that, while both the sampling points and the statistical times are more than 400, the Greenwood frequency can be measured accurately. Thirdly, the influence of the measurement noise is considered and the result shows that the deviation error of the measured value is reduced from 30% to 0.6% with the noise removed. Fourthly, the repeatability of the phase difference method is measured. It is shown that the deviation RMS error is 1.9 Hz which is 3% of the ideal value. Therefore, the Greenwood frequency can be measured accurately with the phase difference method. Based on the above results, the Greenwood frequency of the atmospheric turbulence is measured and analyzed with the range of 8-108 Hz. It indicates that the measured value is almost the same as theoretical value without consideration of the disturbance of the air in the Lab. At last, the relation between the sampling frequency of S-H WFS and the Greenwood frequency is investigated. It can be seen that the sampling frequency of the S-H WFS should be increased if the measured Greenwood frequency is enlarged. Furthermore, an empirical formula is achieved to calculate the needed sampling frequency of the S-H WFS. In a word, all the results show that, when it meets the demand of sampling points, sampling frequency and statistical times, the phase difference method can be used to measure the Greenwood frequency of atmospheric turbulence accurately.
-

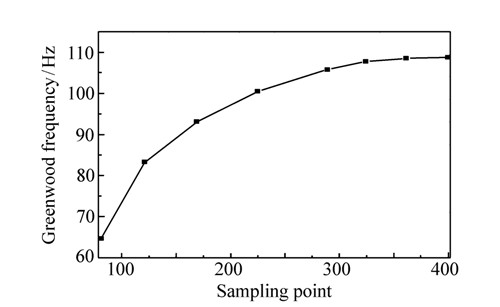
图 3 格林伍德频率和统计次数的关系
Figure 3. Relation between the Greenwood frequency and statistical times

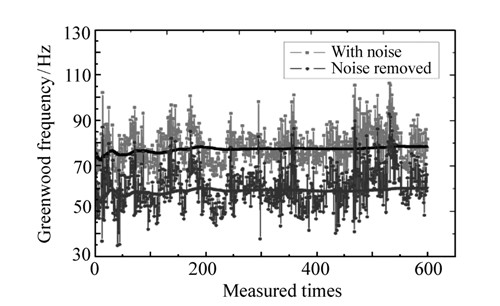
图 4 噪声对格林伍德频率的影响(实线是统计平均值)
Figure 4. Effect of noise on the Greenwood frequency(the line represents the statistical value of Greenwood frequency)

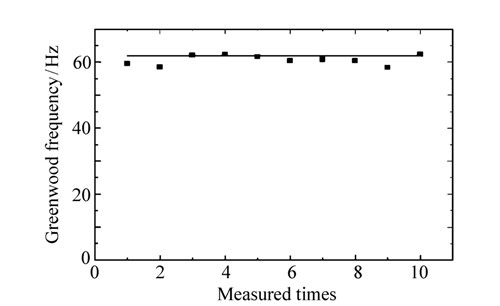
图 5 格林伍德频率和测量次数之间的关系(实线是理论值)
Figure 5. Greenwood frequency as a function of measured times(the line represents the theoretical value)

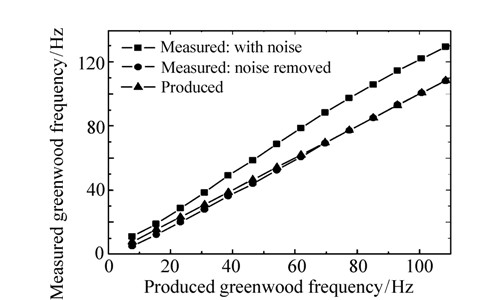
图 6 不同强度湍流的格林伍德频率测量值和理论值之间的关系
Figure 6. Relation between the measured and theoretical Greenwood frequency for different strength of atmospheric turbulence

图 7 大气湍流格林伍德频率的测量误差
Figure 7. Measuring error of Greenwood frequency of atmospheric turbulence

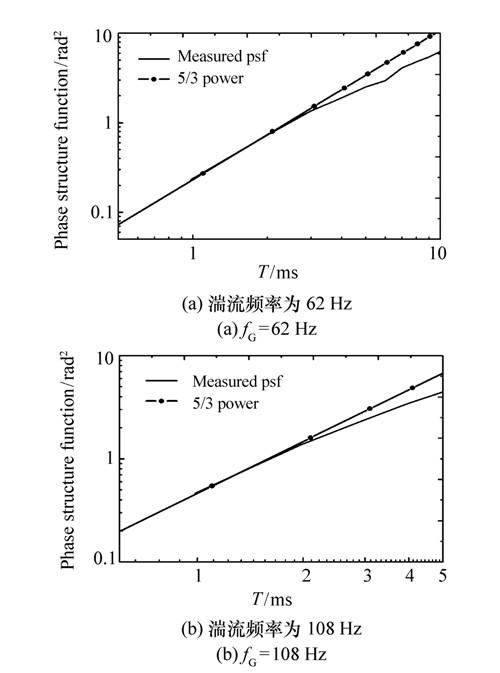
图 9 相位结构函数与采样间隔时间的关系
Figure 9. Relation between the phase structure function and the sampling time
-
[1] [2] [3] [4] [5] [6] [7] [8] [9] [19] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] -

 下载:
下载:




计量
- 文章访问数: 2867
- HTML全文浏览量: 1331
- PDF下载量: 639
- 被引次数: 0
