


Optical system model and calibration of grating projection phase method
-
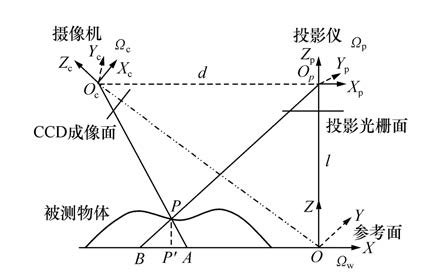
摘要: 本文针对传统投影光栅相位法的光学三角法模型进行了改进,采用直入射光路并配合使用一种简便易行的标定方法,只需使用相移公式求取相位差,而不会引入与系统几何位置关系有关的量,简化了求取高度矩阵的要求。实验结果表明,新系统模型精度良好,测量误差为0.107 mm。采用该模型和标定方法可以克服传统方法系统模型的局限性,最大限度减少误差源并提高抗干扰性。Abstract: In this paper, the traditional optical triangulation model based on phase method is improved, and a new model and calibration method are used which is independent of geometric parameters. The new model requires only calculating phase difference thorough phase shift formula without adding any geometry position parameters, which simplifies the requirement of resolving the altitude matrix. Parallel tests show with the new model, a measurement error of 0.107 mm is reached, showing a good accuracy. Through the study of this paper. This new model calibration method can overcome the limitations of traditional method and minimize the error sources as well as improve the capability of anti-interference.
-
Key words:
- 3D profile /
- grating projection /
- phase /
- calibration /
- system model
-
[1] [1] CHEN F,BROWN G M,SONG M. Overview of three-dimensional shape measurement using optical methods[J]. Optical Engineering,2000,39(1):10-22. [2] [2] 李永怀,冯其波.光学三维轮廓测量技术进展[J].激光与红外,2005,35(3):143-147. LI Y H,FENG Q B. Overview of optical 3D profile measurement[J]. Laser & Nfrared,2005,35(3):143-147.(in Chinese) [3] [3] 孙宇臣,葛宝臻,张以谟.物体三维信息测量技术综述[J].光电子激光,2004,15(2):248-254. SUN Y CH,GE B ZH,ZHANG Y M. Review for the 3D information measuring technology[J]. J. Optoelectronics·Laser,2004,15(2):248-254.(in Chinese) [4] [4] 戴美玲,杨福俊,耿敏,等.单幅彩色条纹投影的不连续物体表面三维形貌测量[J].光学学报,2012,32(4):1-6. DAI M L,YANG F J,GENG M,et al.. Single color fringe projection for measuring three-dimensional shapes with discontinuities[J]. Acta Optica Sinica,2012,32(4):1-6.(in Chinese) [5] [5] 戴美玲,杨福俊,何小元.基于双频彩色光栅投影测量不连续物体三维形貌[J].光学精密工程,2013.1,21(1):7-12. DAI M L,YANG F J,HE X Y. Three-dimensional shapes measurement of objects with discontinuities by dual-frequency color fringe projection[J]. Opt. Precision Eng.,2013,21(1):7-12.(in Chinese) [6] [6] TAKEDA M,MUTOH K. Fourier transform profilometry for the automatic measurement of 3-D object shapes[J]. Applied Optics,1983,22(24):3977-3982. [7] [7] 王长波,谢明红.格雷编码与相移结合的双目三维重构[J].计算机工程,2013,39(5):178-182. WANG CH B,XIE M H. Binocular three-dimention reconstruction combined with gray coding and phase-shift[J]. Computer Engineering,2013,39(5):178-182.(in Chinese) [8] [8] 盖绍彦,达飞鹏.一种新的相位法三维轮廓测量系统模型及其标定方法研究[J].自动化学报,2007,33(9):902-910. GAI SH Y,DA F P. A new method of 3d shape measurement system based on phase measuring profilometry and its calibration[J]. Acta Automatica Sinica,2007,33(9):902-910.(in Chinese) [9] [9] 王露阳,达飞鹏.基于彩色光栅投影的快速三维测量方法[J].应用光学,2011.3,32(2):276-280. WANG L Y,DA F P. Rapid 3D shape measurement based on color encoded fringe projection[J]. J. Applied Optics,2011.3,32(2):276-280.(in Chinese) [10] [10] KANJI MASHIMO. Development of optical noncontact sensor for measurement of three-dimensional profiles using depolarized components of scattered light[J]. Opt. Eng.,1997,36(1):227-234. [11] [11] SRINIVASAN V,LIU H C,HALIOUA M. Automated phase-measuring profilometry of 3-D diffuse objects[J]. Applied Optics,1984,23(18):3105-3108. [12] [13] 王永红,李骏睿,孙建飞,等.散斑干涉相位条纹图的频域滤波处理[J].中国光学,2014,7(3):389-395. WANG Y H,LI J R,SUN J F,et al.. Frequency domain filtering for phase fringe patterns of digital speckle pattern interferometry[J]. Chinese Optics,2014,7(3):389-395. (in Chinese) -

 下载:
下载:








图(10)
计量
- 文章访问数: 2748
- HTML全文浏览量: 1132
- PDF下载量: 723
- 被引次数: 0
