


Static pointing error of level mounting optoelectronic telescope
-
摘要: 为了提高水平式光电望远镜静态指向精度,对光电望远镜静态指向修正模型进行了理论分析和实验研究,建立了水平式望远镜指向模型。首先,介绍了球谐函数模型和水平式望远镜指向模型,并对水平式望远镜指向模型加以修改。然后,对全天区均匀分布的70颗Tycho-2恒星进行实际观测,获得水平式光电望远镜在L轴和B轴上的指向偏差,利用最小二乘法对该模型进行拟合,计算出水平式望远镜指向模型中各待定系数。最后,采用该指向模型对某型水平式望远镜进行了修正。实验结果表明:采用水平式望远镜指向模型进行修正后,望远镜设备总指向精度由修正前的152.10"提高到了4.76"。满足系统总体提出的精度要求,能够广泛地应用于科研和工程领域。Abstract: In order to improve the static pointing accuracy of level mounting optoelectronic telescope, the static pointing models are presented after theoretical analysis and experimental research, and modified model for level mounting optoelectronic telescope is established. First, spherical harmonic function model and modified model for level mounting optoelectronic telescope are introduced. Then 70 stars from Tycho-2 scattered uniformly in the sky were selected to be measured, and the discrete values of the 70 stars' pointing errors were gained in longitude and latitude dimensions, respectively. Finally, the coefficients in the total pointing error model were obtained by least square fitting method. Experimental results indicate that pointing precision of level mounting optoelectronic telescope can be improved from 152.10" (without modified model) to 4.76" (with modified model). The modified model for level mounting optoelectronic telescope can satisfy the requirements in general design, which can be widely applied in science and engineering field.
-
Key words:
- optoelectronic telescope /
- space objects /
- static pointing error
-

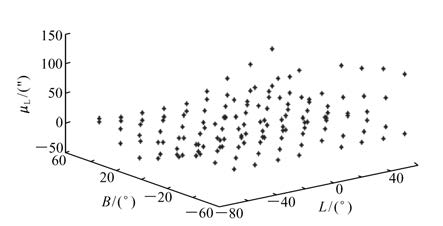
图 4 球谐函数模型修正后L轴的残差分布图
Figure 4. Distributing of residue in L axis with spherical harmonic function model

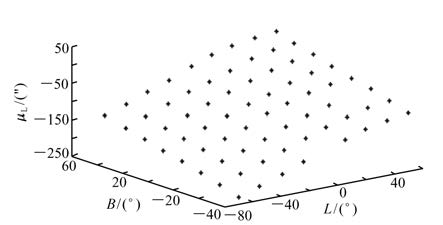
图 5 球谐函数模型修正后B轴的残差分布图
Figure 5. Distributing of residue in B axis with spherical harmonic function model

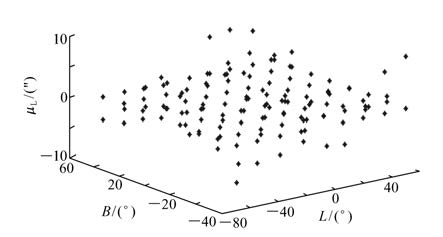
图 6 水平式望远镜指向模型修正后L轴的残差分布
Figure 6. Distributing of residue in L axis with modified model for level mounting optoelectronic telescope

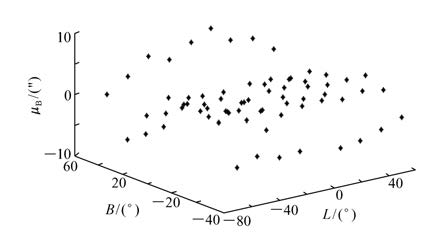
图 7 水平式望远镜指向模型修正后B轴的残差分布
Figure 7. Distributing of residue in B axis with modified model for level mounting optoelectronic telescope
表 3 70颗恒星资料所确定的球谐函数模型系数
Table 3. Coefficients in spherical harmonic function model from data of 70 starts
L axis coefficients Result(″) B axis coefficients Result(″)  下载: 导出CSV
下载: 导出CSV
表 4 70颗恒星资料所确定的水平式望远镜指向模型系数
Table 4. Coefficients in modified model for level mounting optoelectronic telescope from data of 70 starts
L axis coefficients Result(″) B axis coefficients Result(″)
下载: 导出CSV
-
[1] [1] 门涛,徐蓉,刘长海,等.光电望远镜暗弱目标识别算法及探测能力[J].强激光与粒子束,2013,25(3):587-592. MEN T,XU R,LIU CH H,et al.. Dark target identificaiton algorithm and detecting ability of optoelectronic telescopes[J]. High Power Laser and Particle Beams,2013,25(3):587-592.(in Chinese) [2] [2] 张景旭.地基大口径望远镜系统结构技术综述[J].中国光学,2012,5(4):327-336. ZHANG J X. Overview of structure technologies of large aperture ground-based telescopes[J]. Chinese Optics,2012,5(4):327-336.(in Chinese) [3] [3] 高昕,王建立,唐嘉,等.低轨微小卫星及小碎片搜索/跟踪机动式大视场光电望远镜[J].中国光学,2011,4(2):124-128. GAO X,WANG J L,TANG J,et al.. Overview Mobile telescope with large FOV for searching and tracking low-orbit micro-satellites and space debris[J]. Chinese Optics,2011,4(2):124-128.(in Chinese) [4] [4] 刘廷霞,王伟国,李博,等.水平式经纬仪静态指向修正模型的比较与改进[J].光学精密工程,2010,18(6):1374-1380. LIU T X,WANG W G,LI B,et al. Comparison and improvement of correction models for static pointing of level mounting theodolite[J]. Opt. Precision Eng.,2010,18(6):1374-1380.(in Chinese) [5] [5] 潘年,马文礼.拼接式钢带光栅编码器测角误差分析与修正[J].中国光学,2013,6(5):788-794. PAN N,MA W L. Error analysis and correction of scale tape grating encoder[J]. Opt. Precision Eng.,2013,6(5):788-794.(in Chinese) [6] [6] 平一鼎,张晓祥,鲁春林.65 cm水平式望远镜静态指向模型[J].天文学报,2006,47(2):224-230. PING Y D,ZHANG X X,LU CH L. Static pointing model of 65 cm level mounting telescope[J]. Acta Astronomica Sinica,2006,47(2):224-230.(in Chinese) [7] [7] 张晓祥,吴连大.望远镜静态指向模型的基本参数[J].天文学报,2001,42(2):198-205. ZHANG X X,WU L D. The basic parameters of telescope static point model[J]. Acta Astronomica Sinica,2001,42(2):198-205.(in Chinese) [8] [8] 韩雪冰.水平式望远镜测量算法研究与精度分析检测[D].长春:中国科学院长春光学精密机械与物理所,2009. HANG X B. Research on measuring algorithm and precision analysis detection of Alt-alt telescope[D]. Changchun:Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,China,2009.(in Chinese) [9] [9] 薛向尧,高云国,韩光宇,等.水平式经纬仪指向误差的统一补偿技术[J].光学精密工程,2011,19(7):1524-1530. XUE X Y,GAO Y G,HAN G Y,et al.. Total correction method of pointing error for level mounting theodolite[J]. Opt. Precision Eng.,2011,19(7):1524-1530.(in Chinese) [10] [10] 瞿锋,赵春梅,卫志斌.人卫激光测距望远镜系统的指向修正[J].测绘科学,2006,31(4):84-86. QU F,ZHAO CH M,WEI ZH B. Telescope orientation correction for satellite laser range[J]. Science of Surveying and Mapping,2006,31(4):84-86.(in Chinese) [11] [11] 韩雪冰,张景旭,王志,等.水平式光电望远镜照准差检测方法[J].光电工程,2009,36(6):63-67. HANG X B,ZHANG J X,WANG ZH,et al.. Research of ALT-alt photoelectric telescope sighting error measurement[J]. Opto-electronic Engineering,2009,36(6):63-67.(in Chinese) -

 下载:
下载:



计量
- 文章访问数: 2284
- HTML全文浏览量: 966
- PDF下载量: 700
- 被引次数: 0
