


EMD filtering of fiber gyro in initial alignment of SINS
-
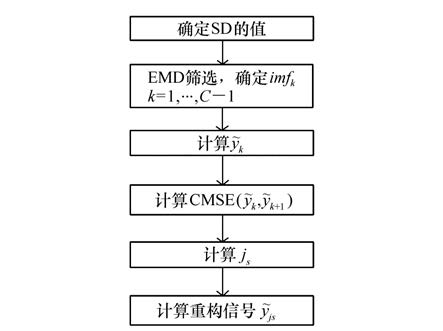
摘要: 为了实现低成本SINS初始对准,降低对准过程复杂程度,提高系统对准精度,缩短对准时间,本文引入了EMD滤波技术。首先,采集IMU输出信号,根据EMD算法将信号分解为IMF簇,按照CMSE标准对信号进行重构,完成信号滤波处理;接着,按照AR模型对经EMD滤波前后的数据噪声进行建模;然后,分别利用原始信号和EMD降噪后信号进行SINS姿态粗对准;最后,根据IMU模型和SINS误差模型,采用零速对准方式,完成SINS精对准。实验结果表明:经EMD降噪后的信号粗对准精度为1.3°,精对准精度为0.87 mrad,精对准收敛时间为200 s。Abstract: In order to decrease initial alignment complexity, increase alignment precision, and minimize time consumption of alignment process, a new method of the EMD filtering is adopted for SINS initial alignment. First, based on the algorithm of EMD sift process, the IMU signal can be decomposed into a cluster of IMFs. According to the criterion of CMSE minimization, the IMU signals can be reconstructed utilizing the IMFs cluster. Then IMU noise of original signal and filtering signal can be modeled by ARMA algorithm, respectively. Furthermore, the coarse initial alignment process is demonstrated by the physics characteristic of the earth, and the results are compared by the data non-filtering and filtering of the same IMU. Finally, the fine initial alignment of SINS is completed using non-filtering data, filtering data of IMU and SINS error model. Experimental results indicate that the precision of azimuth angle coarse alignment is 1.3°, fine alignment is 0.87 mrad, and Kalman filter converge time is 200 s.
-

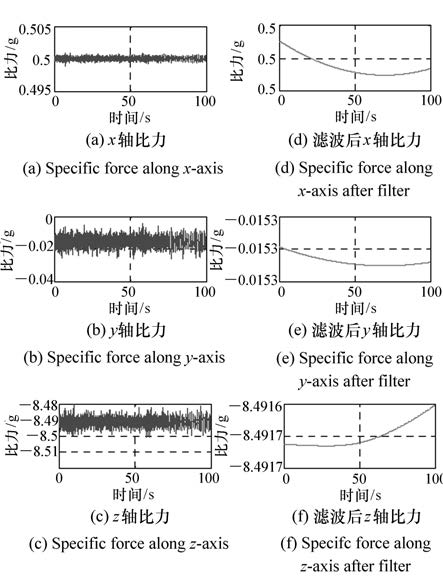
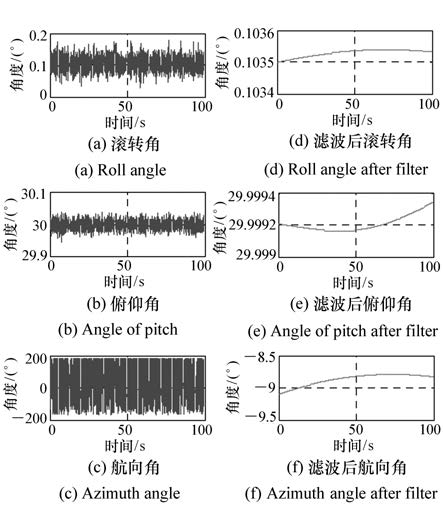
图 6 IMU EMD滤波前后粗对准结果对比
Figure 6. Comparison of coarse alignment before and after EMD filter

图 7 EMD滤波前后航向角初始精对准结果
Figure 7. Initial fine alignment of azimuth angle before and after EMD filter

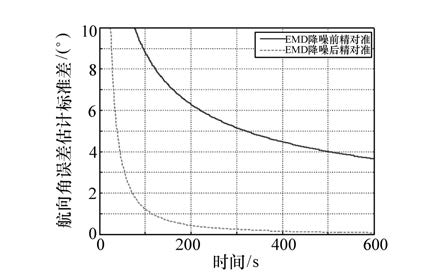
图 8 EMD滤波前后航向角初始精对准估计协方差
Figure 8. Initial fine alignment estimation covariance of azimuth before and after EMD filter
-
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] -

 下载:
下载:




图(8) / 表(1)
计量
- 文章访问数: 1904
- HTML全文浏览量: 627
- PDF下载量: 838
- 被引次数: 0
