


Effect of gate width of laser range gating imaging on image SNR
-
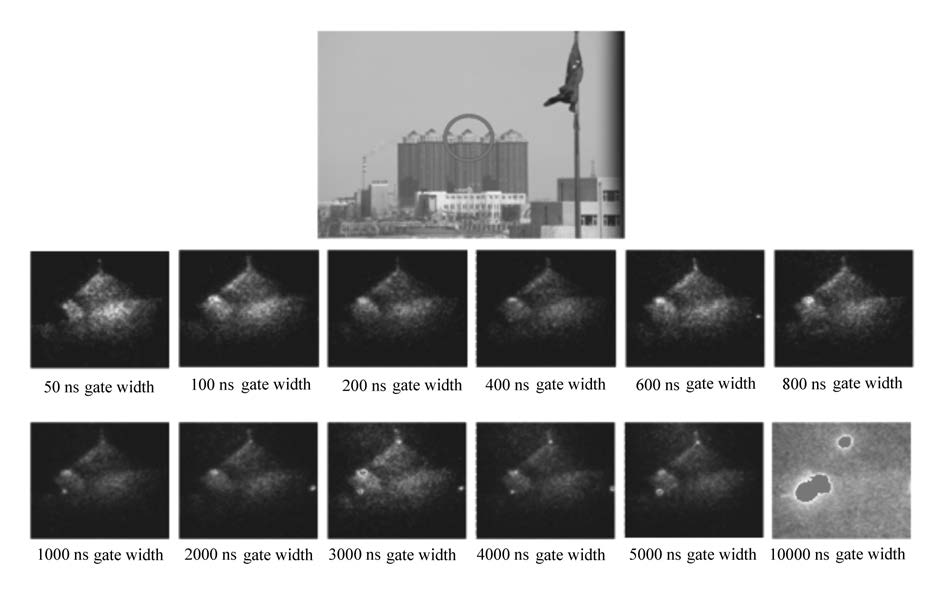
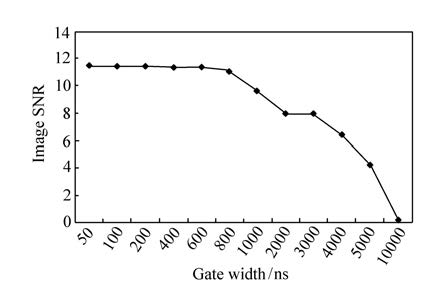
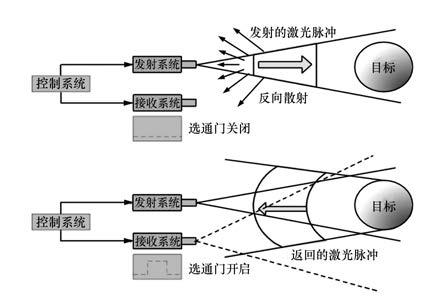
摘要: 为了解不同激光测距精度下的选通成像信噪比,本文利用外场实验系统对不同门宽条件下的图像信噪比进行了分析。首先,根据激光距离选通成像理论建立作用距离模型,初步确定系统各项参数。在此基础上,构建外场实验系统,并利用实验系统进行外场实验研究。对不同门宽条件下的图像进行分析对比,获得门宽与图像信噪比关系曲线。实验结果表明:在门宽2 μs范围内,图像信噪比≥8,图像质量满足自动识别要求,充分证明了距离选通成像系统对测距精度要求较低,完全满足实际应用需求。Abstract: The experiment system to analyze the image SNR with different gate width was used in this paper for confirming the range gating imaging SNR with different laser range measuring accuracy. First of all, the system parameters were determined according to the coverage model of the laser range gating imaging. On the basis of that, the experiment system was established and the outdoor experiment research was made with this system. The comparison analyzing of different gate width image also was made, and the curve of the relation between gate width and image SNR was obtained. The final experiment result indicates that the image SNR ≥8 with gate width ≤2 μs can satisfy the requirement of auto recognition, which indicates that the range gating imaging system has no very strict requirement to the range measuring accuracy, and can satisfy the practical application requirement.
-
Key words:
- range gating /
- gate width /
- SNR /
- laser
-
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] -

 下载:
下载:


图(4)
计量
- 文章访问数: 2789
- HTML全文浏览量: 1416
- PDF下载量: 796
- 被引次数: 0
