


Stereo mapping camera modeling and simulation based on the physical mechanism of on-orbit imaging
-
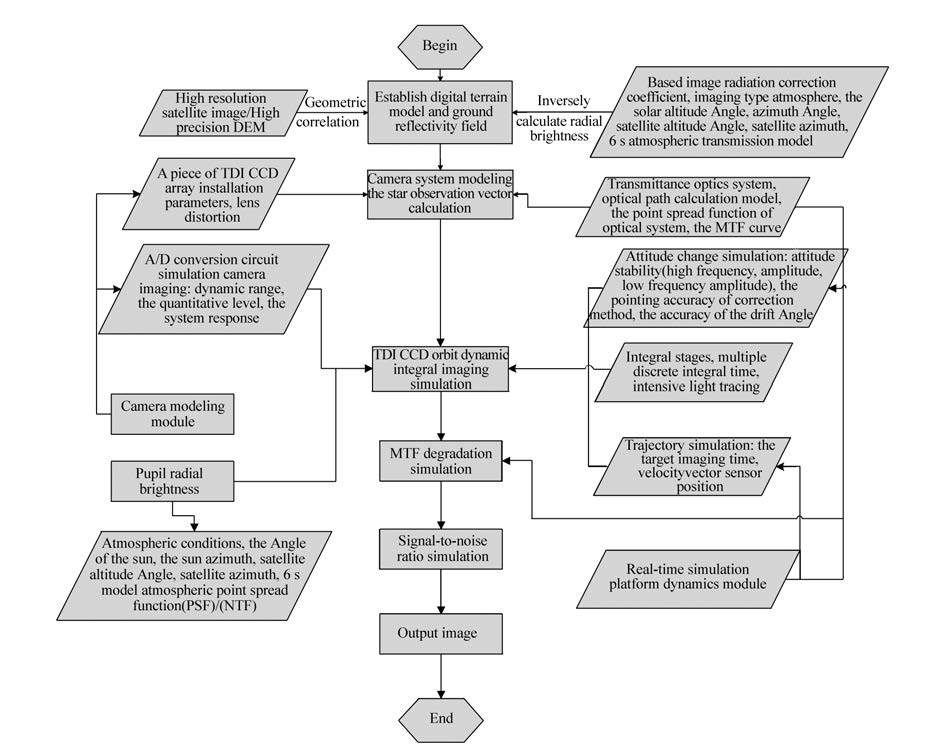
摘要: 基于在轨成像物理机理的立体测绘相机成像建模与仿真综合考虑了大气辐射传输、卫星运行平台、光学系统成像、相机辐射响应等各个环节,采用数值模拟技术进行精确建模,可用于进行成像过程端到端的完整分析,评估成像系统设计可行性及成像质量。本文以可见光立体测绘相机为例,采用高精度高、分辨率地表物理模型作为输入源,首先结合立体测绘相机内外方位元素计算正视相机和前视相机CCD光敏面各亚像元区域中心的观测向量,然后根据目标相机的成像参数得到地面目标在相机入瞳处的辐亮度,最后通过光线追迹算法和光学系统点扩散函数模型计算探测器靶面的辐通量,经由探测器辐射响应模型得到数字影像。实验结果表明,正视相机几何物理模型定位精度达124 m,前视相机定位精度达193 m,能够较为可靠地模拟出立体影像,模拟方法可行。Abstract: A system model for the simulation of stereo mapping camera is presented. The system is divided into some parts: atmospheric radiation transmission, satellite platform, optical system, camera radiation response and so on. The numerical simulation technology can be used to complete end-to-end analysis and assess the feasibility of physical imaging system design, and predict the stereo mapping camera on-orbit imaging capability. In this paper, we take visible imaging stereo system as example. The high precision and high resolution surface physical model is used as the input source. First of all, the interior and exterior camera elements are used to calculate the observation vector on the all pixels of CCD photosensitive surface in forward-looking and faced-looking camera. And then according to the imaging camera parameters for ground targets, the radial brightness of the camera into the pupil is calculated. Finally, through the ray tracing algorithm and point spread function of optical system model, the probe on the surface of the target radial flux is calculated. Then the digital image is obtained by probe radiation response model. The experimental results show that the geodetic precision of physical model for faced-looking camera is 124 m, and that for forward-looking camera is 193 m, indicating that more reliable simulating stereo images can be obtained by this simulation method.
-
Key words:
- simulation /
- physical mechanism /
- ray tracing /
- stereo mapping
-
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] -

 下载:
下载:




图(5) / 表(2)
计量
- 文章访问数: 2627
- HTML全文浏览量: 1137
- PDF下载量: 656
- 被引次数: 0
