


Space-based gravitational wave detection mission: design highlights of LISA system
-
摘要: 为了验证广义相对论,世界各国竞相开展了空间引力波探测方面的研究。本文以欧洲空间引力波探测LISA(Laser Interferometer Space Antenna)计划为例,根据基线设计,对LISA系统有效载荷及主要组件的设计进行了分析和阐述。LISA主要探测和研究低频引力波辐射,其工作频段为10-3~1 Hz,工作距离为5×106 km,预计能探测到双致密星系统以及星系合并引起的超大质量并合等波源,测距精度达到pm量级。以上研究希望能对我国未来的空间引力波探测计划有一定启示。Abstract: In order to verify the theory of general relativity, various countries in the world have developed the space gravitational waves detection. Taking European space gravitational waves detection plan-Laser Interferometer Space Antenna(LISA) as an example, the payload of LISA system and the design of the main components are analyzed and explained. The LISA mainly can detect and research low frequency gravitational wave radiation. The measurement bandwidth of LISA is from 10-3 Hz to 1 Hz, with arm-length of 5 million kilometers. The LISA can measure the time-varying strains in space-time caused by gravitational waves created by astrophysical objects and events, such as ultra-compact galactic binaries and the merger of super-massive black holes, which can only be detected by a space-based observatory. The range accuracy of LISA system could be as high as several pico-meter. Through above studies, it is expected to gain some inspiration for Chinese space-based gravitational wave detection mission.
-
Key words:
- gravitational wave /
- laser interferometer /
- telescope
-

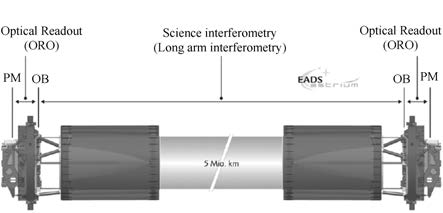
图 1 LISA系统5×106km 臂长测量概念图
Figure 1. Concept of LISA′s five million kilometers arm measurement
-
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] -

 下载:
下载:

图(4)
计量
- 文章访问数: 4952
- HTML全文浏览量: 784
- PDF下载量: 1093
- 被引次数: 0
