


Design of refocusing system for a high resolution TDICCD earth observation camera
-
摘要: 本文详细介绍了一种基于卫星平台的对地观测高分辨率空间TDICCD相机调焦控制系统的设计与实现。针对相机轨道标称值为644.6 km的太阳同步轨道,为实现对地全色成像2 m分辨率和多光谱成像8 m分辨率,推扫成像不小于100 km的地面覆盖宽度要求,采用8片TDICCD高精度交错拼接技术获得高分辨率相机焦平面,以实现对地推扫成像高分辨率和宽覆盖的要求。首先,介绍高分辨率TDICCD相机的离轴光学系统设计;然后,介绍相机调焦系统组成和TDICCD长焦平面拼接技术;最后,对相机调焦系统进行调焦精度测试,根据测试数据分析出相机调焦精度并与理论设计值进行比较分析,调焦,精度测试结果为±7.2 μm(3σ),满足高分辨率TDICCD相机在轨成像需要的高精度调焦要求。Abstract: This paper describes the design and realization of a refocusing system for a earth observation space TDICCD camera based on the satellite with 2 m pan resolution and 8 m multispectral resolution on 644.6 km sun synchronous orbit. The 100 km swath and wider field of view is acquired by the 8 TDICCDs mechanical interleaving assembly on the focal plane. Firstly, the four mirror anastigmatic off-axis optical system of this earth observation space TDICCD camera and the advantage of opticl system is introduced. Secondly, the refocusing system as well as the technique of TDICCDs mechanical interleaving assemble focal plane of this space camera is discussed in detail. Finally, the refocusing accuracy of refocusing system is measured by open-loop method. Experimental results indicate that the refocusing accuracy is ±7.2 μm(3σ), which can satisfy the requirements of refocusing accuracy for the high resolution TDICCD earth observation camera.
-
Key words:
- TDICCD assemble /
- refocusing control system /
- precision /
- open-loop control
-

图 1 高分辨率TDICCD相机光学系统设计原理图
Figure 1. Priciple diagram of optical system of high resolution TDICCD camera

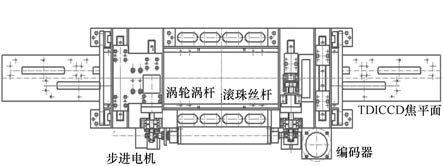
图 2 TDICCD焦面组件机械交错平面拼接原理图
Figure 2. Principle diagram of mechanical interleaving assembly TDICCD focus plane

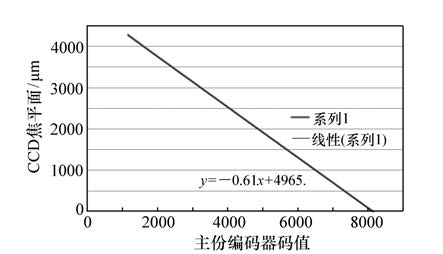
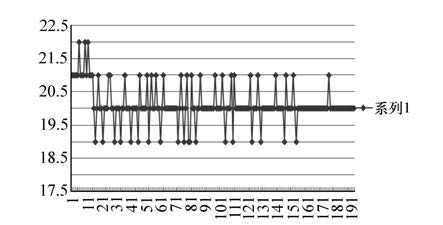
图 6 调焦行程内CCD焦平面位置与码值对应曲线
Figure 6. Position curve of CCD focus plane vs. encoder value
-
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] -

 下载:
下载:



图(7)
计量
- 文章访问数: 2300
- HTML全文浏览量: 824
- PDF下载量: 733
- 被引次数: 0
