


Velocity measurement method based on single Moiré fringe
-
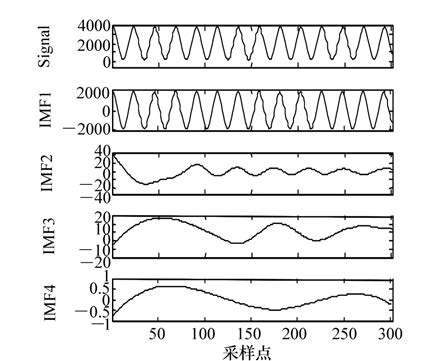
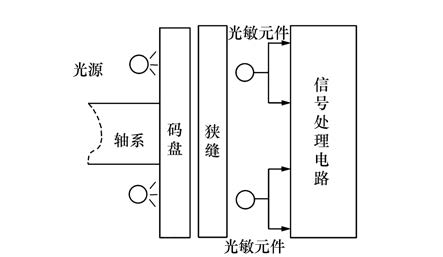
摘要: 为了提高编码器的测速精度,研究了基于希尔伯特-黄变换的光电编码器单莫尔条纹测速方法。首先,利用AD采集编码器的单路莫尔条纹光电信号,并将信号序列通过EMD变换,滤除直流分量;然后,利用希尔伯特变换求出信号的相位变化,并通过差分运算求取信号的瞬时频率;最后,结合编码器的具体参数求取编码器的转速。实验结果表明:对某21位编码器进行测速实验,测速误差均方差由0.022 4 rad/s降低到0.013 4 rad/s。此方法测速稳定性高,抗干扰能力强,可用于速度精度要求较高的测速场合。Abstract: In order to improve the velocity measurement accuracy of photoelectric encoder, a velocity measurement method based on the single Moir fringe is introduced. First, Moir fringe photoelectric signals are transported into DSP through a AD acquisition card with EMD(Empirical Mode Decomposition) algorithm which is used to curb DC components. Then, the Hilbert transform is utilized to analyze the change of signal phase and the instantaneous signal frequency calculated by using the difference arithmetic. At last, encoder velocity is derived from the specific parameters of the encoder. Experiment results on certain 21 bit photoelectric encoder indicate that the root mean square of the measurement errors has reduced from 0.022 4 rad/s to 0.013 4 rad/s. This method is of high speed stability, strong anti-interference ability, and can be used for precision speed occasions with higher requirement.
-

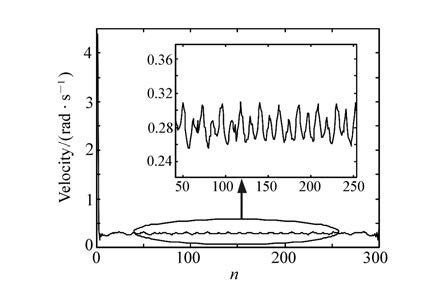
图 5 M法测速结果
Figure 5. Velocity measuring results of M method with orthogonal correction
-
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] -

 下载:
下载:



图(5) / 表(1)
计量
- 文章访问数: 1381
- HTML全文浏览量: 340
- PDF下载量: 654
- 被引次数: 0
