


Multi-sensor image matching based on line features under complex object conditions
-
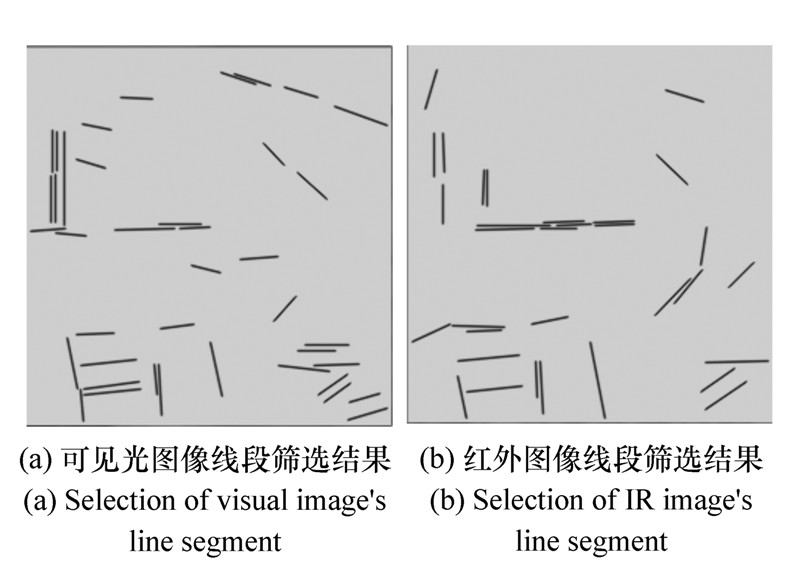
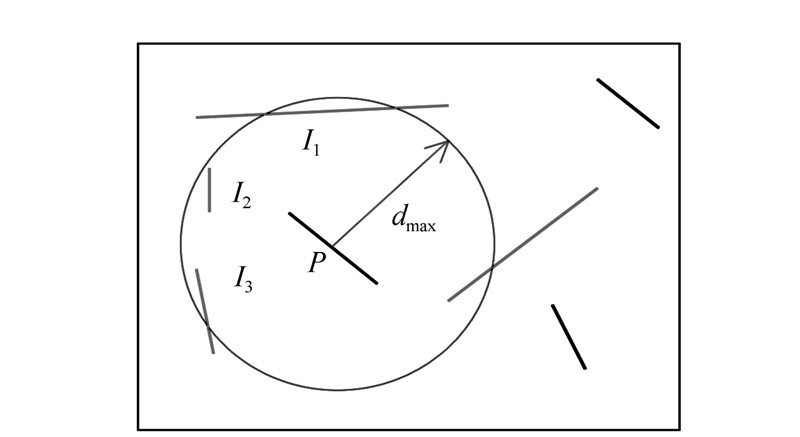
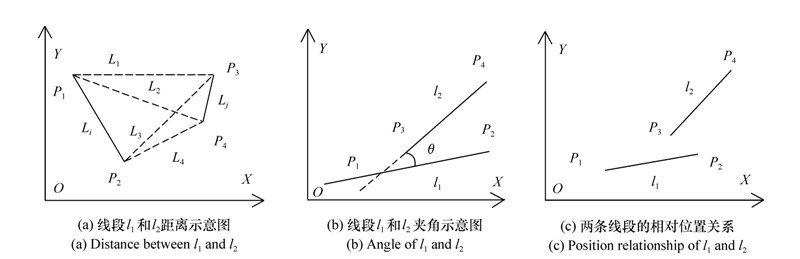
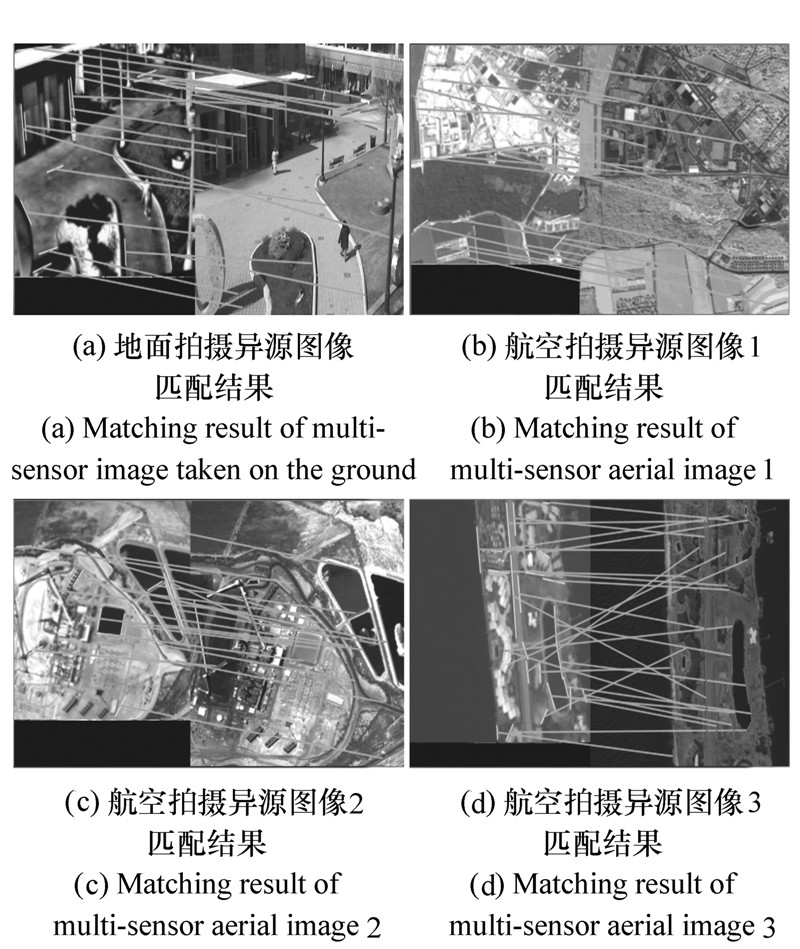
摘要: 为了寻求应用于复杂地物条件下异源景象匹配的算法,使其满足尺度和旋转不变性,受视觉成像系统的启发,利用初始简图可以表征图像大部分信息的特点,提出了一种新的基于线段对的异源图像匹配算法。首先,提取并筛选图像中能够表征图像信息的线段;然后,利用线段自身信息及线段的相对位置关系构建线段对特征;接着,通过线段对之间的相似性对图像进行粗匹配;最后,利用线段之间的拓扑关系进行精匹配。实验表明,本文方法对具有旋转、缩放和平移变换的异源图像的匹配正确率达到了75%以上,运算时间是传统匹配算法的1/5左右,基本满足了异源景象匹配应用对算法实时性和准确性的要求。Abstract: In order to provide a robust multi-sensor image matching algorithm to satisfy the scale and rotation invariance, we put forward a new matching method based on key line segment pairs, inspired by the visual system in which most of the information of image is contained in sketch.Firstly, the line segments that can express the feature of image are found and screened out.Then, the characteristic of line segment pairs is constructed by using the information and the relative position of line segments.And initial matching is carried out by the similarity between line segment pairs of two images.Finally, the topological relationship between line segments is used to achieve accurate registration.Experiment results tested by multi-sensor images show that the accuracy of image matching by using this proposed algorithm is more than 75% and the computing time is about 1/5 of traditional algorithm which satisfies the requirement of real-time and veracity in the multi-sensor image matching.
-

图 6 δ值与算法运算时间及特征数量的关系
Figure 6. Relationship between δ,operation time and feature number

图 7 dmax值和匹配正确率及运算时间的关系
Figure 7. Relationship between dmax,the correct matching rate and operation time
-
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] -

 下载:
下载:






图(9) / 表(1)
计量
- 文章访问数: 1460
- HTML全文浏览量: 454
- PDF下载量: 843
- 被引次数: 0
