


Laser imaging optical system design with a shared aperture employing APD array
-
摘要: 针对机载平台激光3D成像系统的轻小型需求,设计了采用APD阵列的共口径激光收发光学系统。在分析激光成像系统照明方式及其光学系统结构的基础上,给出了激光3D成像光学系统结构框图:激光经衍射元件实现分束照明,采用双工反射镜实现收发光路的耦合。该光学系统用于2 km以内的目标三维成像,根据激光测距方程,确定了接收光学系统的参数以获得满足信噪比的回波能量。为避免造成像素之间串扰,设计了5倍扩束比的发射光学系统。最后,采用偏振片与1/4波片相结合的方式消除杂光,降低了发射光路对接收光路的影响。设计结果表明:接收光学系统弥散斑直径小于120 μm,畸变小于0.2%。该光学系统体积小、重量轻,成像质量良好,可为同类激光成像光学系统提供借鉴参考。Abstract: To meet the requirements of light and small laser 3D imaging system on airborne platforms, a co-aperture laser transceiver optical system is designed employing APD array. On the basis of a brief analysis of the imaging system illumination pattern and optical system structure, the laser 3D imaging system block diagram is given as following: the laser beam can pass through a diffraction element to achieve beam splitting and the mirror with a hole in the middle is used to achieve coupled launching/transmitting optical path. The optical system is used for three-dimensional imaging within a distance of 2 km, and the receiving optical system parameters are determined according to the laser operating range equation to obtain enough echo energy to satisfy the noise ratio. In order to avoid crosstalk between pixels, beam expander of five times is designed. Finally, the stray light is diminished to reduce the impact of the emitted light path on receiving light path by combining the polaroid and quarter-wave plate. The results indicate that the receiving optics has a diffuse spot diameter less than 120 μm and distortion less than 0.2%. The whole optical system could be an example for the similar design with small size, light weight and fine imaging quality.
-

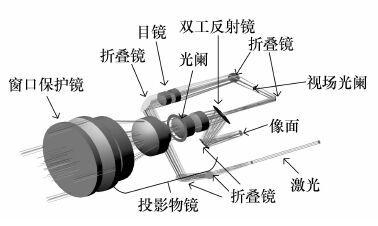
图 1 激光发射/接收系统结构示意图
Figure 1. Block diagram of laser launching/receiving imaging system

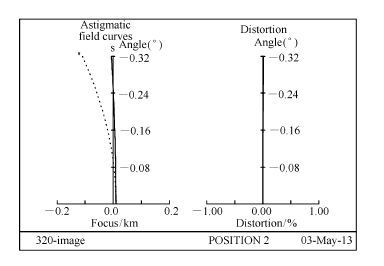
图 3 接收光学系统场曲和畸变曲线
Figure 3. Field curves and distortion graph of receiving optical system

图 7 激光照射Damman光栅后和激光照射成像光纤后光斑分布图
Figure 7. Spot distribution of laser irradiated Damman grating and laser spot distribution of laser fiber after laser irradiation

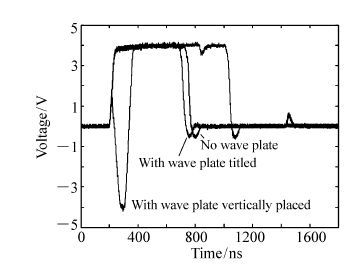
图 8 镜头前无波片、波片垂直放置、波片倾斜放置时,C10508采集到的目标回波信号
Figure 8. Echoing signal in condition of no wave plate,with wave plate vertically placed and wave plate tilted
表 1 光学设计约束
Table 1. Optical design constrain
参数 参数值 工作波段/mm 1.064 焦距/mm 320 F数 6.4 视场角/(°) 0.648 2 像元数 8×8 像元尺寸/μm 320×320 畸变/% <1.76 弥散圆直径/μm <120  下载: 导出CSV
下载: 导出CSV
-
[1] MOLEBNY V,KAMERMAN G,STEINVALL O. Laser radar:from early history to new trends[J]. SPIE,2010,7835:783502-1-783502-30. [2] 何伟基,司马博羽,苗壮,等.光子计数三维成像激光雷达反转误差的校正[J].光学 精密工程,2013,21(10):2488-2494.HE W J,SIMA B Y,MIAO ZH,et al.. Correction of reversal errors in photon counting 3D imaging radar[J]. Opt. Precision Eng.,2013,21(10):2488-2494.(in Chinese) [3] 胡峰,胡春生,王省书,等.成像激光雷达与摄像机外部位置关系的标定[J].光学 精密工程,2011,19(4):938-943.HUF,HU CH SH,WANG X SH,et al.. Calibration of external relation between imaging laser radar and camera[J]. Opt. Precision Eng.,2011,19(4):938-943.(in Chinese) [4] 徐正平,沈宏海,许永森,等.激光成像系统高精度目标距离和强度信息提取[J].红外与激光工程,2014(8):2668-2672.Xu Z P,Shen H H,Xu Y S,et al.. Target-distance and intensity information detecting with high precision in laser imaging system[J]. Infrared and Laser Engineering,2014(8):2668-2672.(in Chinese) [5] 陈骁,石志广,杨卫平,等.利用三维点云的圆锥状弹头目标参数估计[J].红外与激光工程,2014(10):3480-3485.CHEN X,SHI ZH G,YANG W P,et al.. Parameter estimation of conical warhead target based on 3D point cloud[J]. Infrared and Laser Engineering,2014(10):3480-3485.(in Chinese) [6] 张秋晨,施蕊,李卓.激光成像目标模拟器建模方法[J].红外与激光工程,2015(1):112-117.ZHANG Q CH,SHI R,L ZH. Modeling method of laser imaging target simulator[J]. Infrared and Laser Engineering,2015(1):112-117.(in Chinese) [7] STETTNER R,BAILEY H,RICHMOND R. Eye-safe laser radar 3-D imaging[J]. RTO-MP-SCI-145,2004,23:1-16. [8] 严洁,阮友田,薛珮瑶.主被动光学图像融合技术研究[J].中国光学,2015(3):378-385.YAN J,RUAN Y T,XUE P Y. Active and passive optical image fusion technology[J]. Chinese Optics,2015(3):378-385.(in Chinese) [9] MCMANAMON P F. A history of laser radar in the united states[J]. SPIE,2010,7684:76840T-1-76840T-11. [10] SCAMAN M E,ECONOMIKOS L. Computer vision for automatic inspection of complex metal patterns on multichip modules(MCM-D)[J]. IEEE,1995,18(4):675-684. [11] 金光,李艳杰,钟兴,等.空间成像与激光通信共口径光学系统设计[J].光学 精密工程,2014,22(8):2067-2074.JIN G,LI Y J,ZHONG X,et al.. Design of co-aperture optical system for space imaging and laser communication[J]. Opt. Precision Eng.,2014,22(8):2067-2074.(in Chinese) [12] 王锐.激光距离选通成像门宽对图像信噪比影响[J].中国光学,2015(6):951-956.WANG R. Effect of gate width of laser range gating imaging on image SNR[J]. Chinese Optics,2015(6):951-956.(in Chinese) [13] 李艳杰,金光,张元,等.成像与激光发射系统的共口径设计与实验[J].中国光学,2015(2):220-226.LI Y J,JIN G,ZHANG Y,et al.. Co-aperture optical system for imaging and laser transmitting[J]. Chinese Optics,2015(2):220-226.(in Chinese). [14] 张学明.激光接收与彩色电视共窗口设计[J].中国光学,2014(6):942-948.ZHANG X M. Optical design of laser receiving and color TV confocal-window[J]. Chinese Optics,2014(6):942-948.(in Chinese) [15] YAN F,WANG X. Using real-time embedded system with multiple DSPs in corona detection[J]. SPIE,2006,6027:928-933. [16] 陆洪武.太赫兹波束准直光学系统设计[J].光学与光电技术,2015,13(6):77-81.CHEN H W. Design of terahertz beam collimation optical system[J]. Optics & Optoelectronic Technology,2015(6):77-81.(in Chinese) -

 下载:
下载:




计量
- 文章访问数: 2524
- HTML全文浏览量: 719
- PDF下载量: 972
- 被引次数: 0
