


Method of attitude estimation for space object based on single ground-based telescope
-
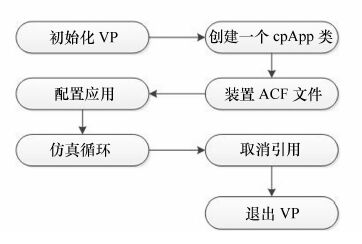
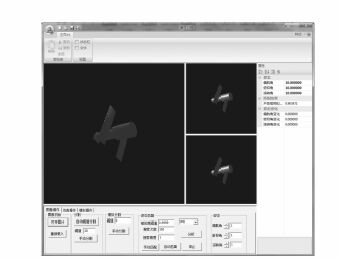
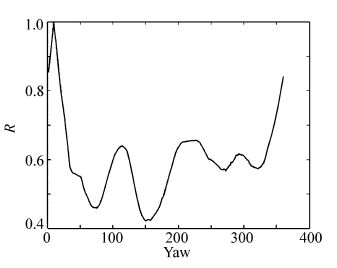
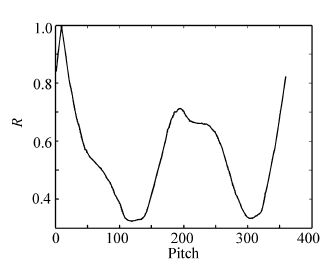
摘要: 为实现从单站光测图像中估计出已知3D模型的空间目标姿态,利用Vega Prime提出了一种采用仿真图像进行相关度局部最优搜索的姿态估计方法,该方法无需建立2D-3D特征投影关系和大量的模型匹配库。首先,对输入图像进行图像预处理,获得目标原始图像。然后,利用Vega Prime加载目标3D模型生成仿真匹配图像,并进行图像预处理获得目标匹配图像,计算两幅图像相关度。最后,更新3D目标模型姿态,直至仿真匹配图像与目标原始图像的相关度值取得局部最优,输出目标模型姿态。仿真实验结果表明,采用本文所提方法的观测仿真图像姿态平均估计误差为3.85°,仿真原图可实现姿态准确估计,表明该方法是一种空间目标姿态估计的有效方法。
-
关键词:
- 姿态估计 /
- 相关度 /
- 空间目标 /
- 地基望远镜 /
- Vega Prime
Abstract: To estimate the attitude of the known 3D model space object from the mono-view image, a method is proposed by searching the local optimum of the correlation between the simulation image generated from Vega Prime and the observation image, which need not establish the relationships of target feature from 2D to 3D and abundant model matching library. Firstly, the input image is preprocessed to obtain the original target image. Secondly, Vega Prime program loads 3D model of the target, and generates a simulation matching image. The simulation image is preprocessed to obtain the matching target image. And the correlation of these two images is calculated. Finally, the attitude of model is updated until the correlation of the matching image and the original image is local optimum. Experimental results show that this method can estimate the attitude from the original simulation image accurately, and the average estimation error of the simulation observation image is 3.85°, which indicates that the proposed method is an effective method for space object attitude estimation.-
Key words:
- attitude estimation /
- correlation /
- space object /
- ground-based telescope /
- Vega Prime
-
表 1 仿真观测图像姿态估计结果
Table 1. Attitude estimation result comparison of the original image and observation simulation image
理论姿态(θ,φ,γ) 仿真观测图像估计结果 (θs,φs,γs) 仿真观测图像估计误差 (Δθs,Δφs,Δγs) (0,0,0) (3.97,3.06,4.76) (3.97,3.06,4.76) (5,10,5) (5.71,9.13,3.72) (0.71,0.87,1.28) (10,15,10) (6.21,17.71,9.72) (3.79,2.71,0.28) (15,15,15) (18.80,18.37,9.69) (3.80,3.37,5.31) (10,20,30) (11.12,22.73,24.78) (1.12,2.73,5.22) (25,25,25) (24.31,26.69,23.21) (0.69,1.69,1.79) (40,40,40) (48.23,49.92,31.93) (8.23,9.92,8.07) (50,50,50) (57.93,50.84,48.76) (7.93,0.84,1.24) (60,60,60) (64.26,59.44,55.76) (4.26,0.56,4.24) (70,70,70) (75.90,76.02,77.75) (5.90,6.02,7.75) (100,100,90) (93.04,105.19,93.86) (6.96,5.19,2.86)  下载: 导出CSV
下载: 导出CSV
-
[1] 王春雪.基于图像的空间目标三维姿态估计研究[D].北京:中国科学院,2014.WANG CH X. The study of 3D pose estimation for space object based on images[D].Beijing:Graduate University of the Chinese Academy of Sciences,2014.(in Chinese) [2] 陈娟,陈乾辉.空间目标三维姿态估计方法综述[J].长春工业大学学报(自然科学版),2008,3(29):323-327.CHEN J,CHEN Q H. Summary of the 3D pose estimations for the space targets[J]. J. Changchun University of Technology(Natural Science Edition),2008,3(29):323-327.(in Chinese) [3] 夏军营.空间目标的单目视觉位姿测量方法研究[D].长沙:国防科学技术大学,2012.XIA J Y. Researches on monocular vision based pose measurements for space targets[D]. Changsha:Graduate School of National University of Defense Technology,2012.(in Chinese) [4] 冷大炜.基于单目视觉的三维刚体目标测量技术研究[D].北京:清华大学,2011.LENG D W. Research on monocular vision based metrology for 3D rigid object[D]. Beijing:Tsinghua University,2011.(in Chinese) [5] 张永军,孔胃.利用单幅影像的空间目标姿态测定方法[J].西安交通大学学报,2009,9(43): 56-61.ZHANG Y J,KONG W. Pose determination of space object with single image[J]. J. Xi'an Jiaotong University,2009,9(43):56-61.(in Chinese) [6] 于起峰,孙祥一,邱志强.从单站光测图像确定空间目标三维姿态[J].光学技术,2002,1(28): 77-80.YU Q F,SUN X Y,QIU ZH Q. Approach of determination of Object's 3D pose from mono-view[J]. Optical Technique,2002,1(28):77-80.(in Chinese) [7] 张原,王志乾,乔彦峰,等.导弹发射姿态测量方法研究[J].中国光学,2015,8(6):997-1003.ZHANG Y,WANG ZH Q,QIAO Y F,et al.. Attitude measurement method research for missile launch[J]. Chinese Optics,2015,8(6):997-1003.(in Chinese) [8] 李晶,袁峰,胡英辉.基于多点合作目标的多线阵CCD空间物体姿态测量[J].光学 精密工程,2013,21(6):269-275.LI J,YUAN F,HU Y H. Attitude measurement of space objects based on multi-linear CCD and multi-point cooperation target[J]. Opt. Precision Eng.,2013,21(6):269-275.(in Chinese) [9] 王彬,何昕,魏仲慧.采用多站图像直线特征的飞机姿态估计[J].光学 精密工程,2013,21(7):195-203.WANG B,HE X,WEI ZH H. Attitude estimation of aircrafts using line features on multi-camera images[J]. Opt. Precision Eng.,2013,21(7): 195-203.(in Chinese) [10] 赵汝进,刘恩海,张文明,等.基于弱透视成像模型的目标三维姿态测量[J].光子学报,2014,5(43):0512002-1-6. [11] 胡薇,张桂林,任仙怡.基于子空间的3D目标识别和姿态估计方法[J].红外与激光工程,2004,6(33):592-596.HU W,ZHANG G L,REN X Y. Eigenspace-based approach for object recognition and pose estimation[J]. Infrared and Laser Engineering,2004,6(33):592-596.(in Chinese) [12] 牛铁.基于Vega Prime的实时三维视景仿真技术的研究[D].乌鲁木齐:新疆大学,2010.NIU T. Research of real-time 3D scene visualization technology based on Vega Prime[D]. Wulumuqi:Xinjiang University,2010.(in Chinese) [13] 于洋,李丹.跟踪图像生成技术应用于光电设备模拟训练[J].液晶与显示,2015,30(2):166-171.YU Y,LI D. Technology of tracking image generating applied in simulation training of photoelectric device[J]. Chinese J. Liquid Crystals and Displays,2015,30(2):166-171. [14] 陈卫兵.几种图像相似性度量的匹配性能比较[J].计算机应用,2010,1(30): 98-100.CHEN W B. Comparison of matching capabilities in similarity measurements[J]. J. Compute Applications,2010,1(30):98-100.(in Chinese) [15] 卫沛锋,刘欣悦,林旭东,等.自适应光学系统测试中大气湍流的时域模拟[J].中国光学,2013,6(3):371-377.WEI P F,LIU X Y,LIN X D,et al.. Temporal simulation of atmospheric turbulence during adaptive optics system testing[J]. Chinese Optics,2013,6(3):371-377.(in Chinese) [16] 瞿青,曹召良,胡立发,等.位相差值法测量大气湍流格林伍德频率[J].中国光学,2015,8(1):121-129.QU Q,CAO ZH L,HU L F,et al.. Greenwood frequency measurement of atmospheric turbulence by phase difference method[J]. Chinese Optics,2015,8(1):121-129.(in Chinese) [17] 姜宝光,穆全全,曹召良,等.液晶波前校正器校正水平方向上的大气湍流[J].液晶与显示,2009,24(3):396-398.JIANG B G,MU Q Q,CAO ZH L,et al.. Correction of turbulence in horizontal direction using a liquid crystal wave-front corrector[J]. Chinese J. Liquid Crystals and Displays,2009,24(3):396-398.(in Chinese) -

 下载:
下载:








图(12) / 表(1)
计量
- 文章访问数: 1920
- HTML全文浏览量: 559
- PDF下载量: 850
- 被引次数: 0
