


Extracting zero-gravity surface figure of mirror by orientation reversal
-
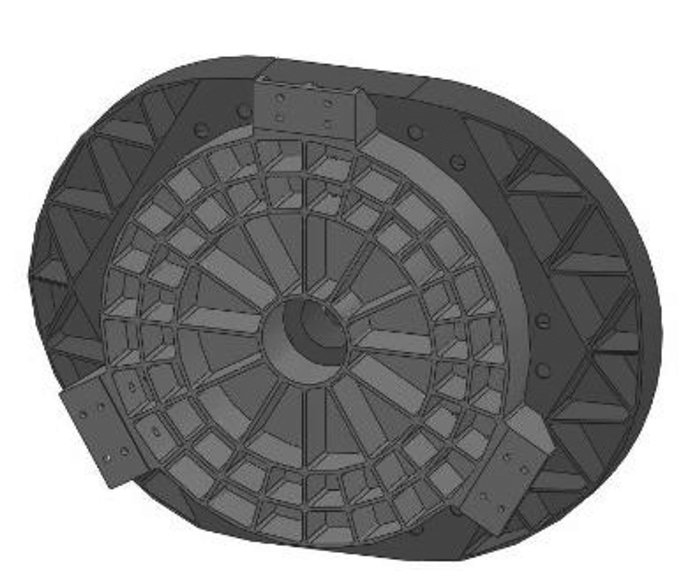
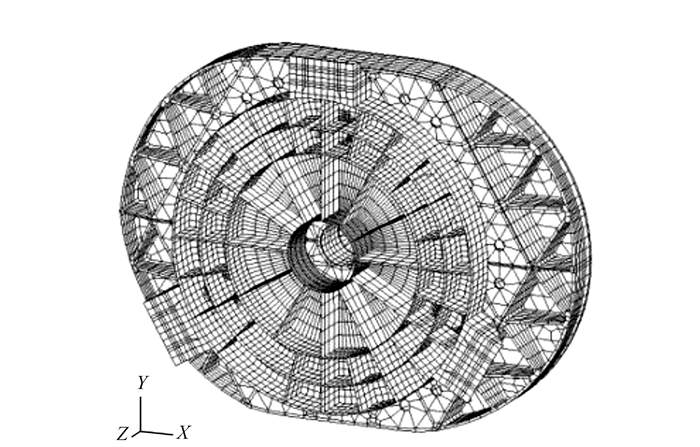
摘要: 为了预估碳化硅反射镜在空间零重力环境下的面形精度,本文开展了在地面环境下利用方位反向技术提取碳化硅反射镜零重力面形的研究。首先,介绍了方位反向技术提取零重力面形的理论依据;其次,利用有限元分析软件,分析了方位反向对反射镜面形的影响;然后,按照试验流程,先后检测了反射镜在0°和180°状态的面形精度,计算两次检测数据的平均值,得到了反射镜零重力面形。结果表明:反射镜地面零重力面形误差RMS值为12.3nm,能够满足设计指标要求。最后,对数据可信度进行了分析,确认了试验数据真实可信。该结果预示了反射镜在空间零重力环境下的面形精度,对反射镜光学加工与装调有重要的指导意义。Abstract: In order to estimate the SiC mirror surface figure under the space zero-gravity environment, extracting zero-gravity surface figure of SiC mirror by orientation reversal under ground environment was studied. Firstly, the principle of extracting zero-gravity surface figure by orientation reversal is introduced. Secondly, the effect of orientation reversal on mirror surface figure is analysed by finite element analysis software. Then, according to the flow chart, mirror surface figure of 0° and 180° conditions are tested successively, and the zero-gravity surface figure is obtained by average two measurements. The data indicate that the RMS value of the ground zero-gravity surface figure of mirror is 12.3nm, which meets the design requirement. Last, data credibility is analysed and confirmed. The obtained results indicate the mirror surface figure in the zero-gravity environment of space, which has important significance for optical fabrication and alignment of mirror.
-
Key words:
- orientation reversal /
- SiC mirror /
- zero-gravity surface figure /
- optical test
-

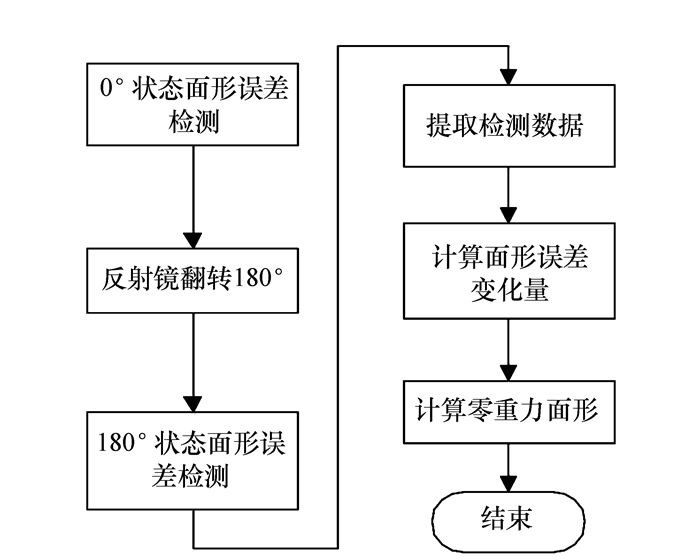
图 3 提取反射镜零重力面形试验流程
Figure 3. Flow chart of extracting zero-gravity surface figure of mirror

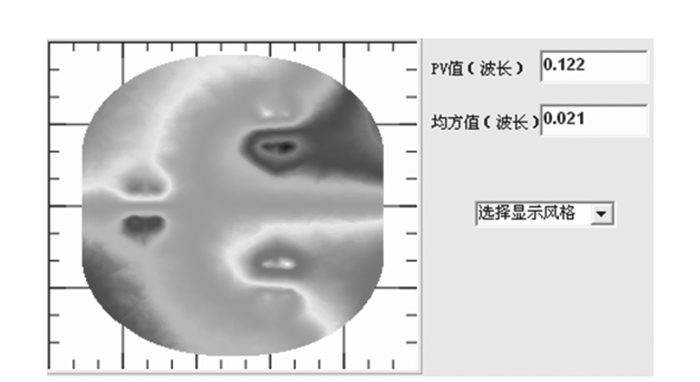
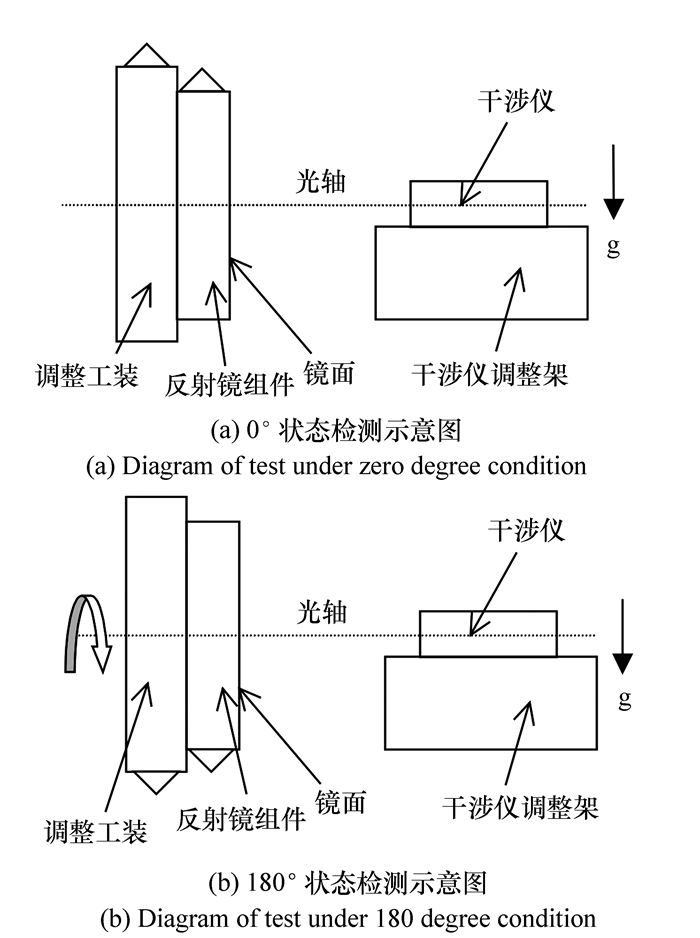
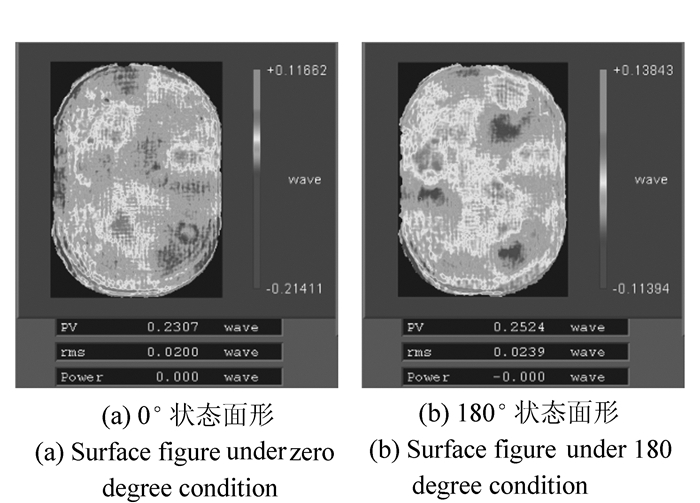
图 8 0°状态和180°状态的反射镜面形误差检测结果
Figure 8. Test results of mirror surface figure under zero degree and 180 degrees conditions

图 9 面形变化量与零重力面形计算结果
Figure 9. Calculation results for variation of surface figure and zero-gravity surface figure
表 1 反射镜组件材料属性
Table 1. Material properties of mirror assembly
材料 密度(ρ)/(103kg·m-3) 弹性模量(E)/MPa 泊松比(μ) 分布位置 SiC 3.1 400 000 0.17 反射镜 TC4 4.44 109 000 0.29 柔性支撑 SiC/Al 2.94 213 000 0.23 基板  下载: 导出CSV
下载: 导出CSV
表 2 反射镜在地面和空间环境下所承受载荷的对比
Table 2. Comparison of mirror loads subjected in ground and space environments
环境 重力载荷/g 热载荷 地面 1 环境温度 空间 0 主动热控装置产生的热量
下载: 导出CSV
-
[1] KORHONEN T, KEINANEN P, PASANEN M, et al..Polishing and testing of the 3.5 m SiC M1 mirror of the Herschel space observatory of ESA[J].SPIE, 2008, 7102:710218_1-710218_7. https://www.researchgate.net/publication/253376797_Polishing_and_testing_of_the_35_m_SiC_M1_mirror_of_the_Herschel_space_observatory_of_ESA [2] KANEDA H, NAKAGAWA T, ENYA K, et al..Optical testing activities for the SPICA telescope[J].SPIE, 2010, 7731:77310V_1-77310V_7. https://www.researchgate.net/publication/253211540_Optical_testing_activities_for_the_SPICA_telescope [3] 李宗轩, 金光, 张雷, 等.3.5 m口径空间望远镜单块式主镜技术展望[J].中国光学, 2014, 7(4):532-541. http://www.opticsjournal.net/Articles/Abstract?aid=OJ0818000452QnTpWsLI Z X, JIN G, ZHANG L, et al..Overview and outlook of monolithic primary mirror of spaceborne telescope with 3.5 m aperture[J].Chinese Optics, 2014, 7(4):532-541.(in Chinese) http://www.opticsjournal.net/Articles/Abstract?aid=OJ0818000452QnTpWs [4] 石磊, 许永森, 刘福贺.光电系统中铍反射镜的发展与应用[J].中国光学, 2014, 7(5):749-758. http://www.chineseoptics.net.cn/EN/abstract/abstract9191.shtmlSHI L, XU Y S, LIU F H.Development and application of beryllium mirrors in optical systems[J].Chinese Optics, 2014, 7(5):749-758.(in Chinese) http://www.chineseoptics.net.cn/EN/abstract/abstract9191.shtml [5] 齐光, 王书新, 李景林.空间遥感器高体份SiC/Al复合材料反射镜组件设计[J].中国光学, 2015, 8(1):99-106. doi: 10.3788/co.QI G, WANG SH X, LI J L.Design of high volume fraction SiC/Al composite mirror in spape remote sensor[J].Chinese Optics, 2015, 8(1):99-106.(in Chinese) doi: 10.3788/co. [6] 陈洪达, 陈永和, 史婷婷, 等.空间反射镜的轻量化及支撑设计研究[J].红外与激光工程, 2014, 43(2):535-540. http://www.cnki.com.cn/Article/CJFDTotal-HWYJ201402037.htmCHEN H D, CHEN Y H, SHI T T, et al..Lightweight and mounting design for primary mirror in space camera[J].Infrared and Laser Engineering, 2014, 43(2):535-540.(in Chinese) http://www.cnki.com.cn/Article/CJFDTotal-HWYJ201402037.htm [7] 徐宏, 关英俊.大口径SiC轻量化反射镜组件的结构设计[J].红外与激光工程, 2014, 43(S1):83-88. http://www.cnki.com.cn/Article/CJFDTotal-HWYJ201402037.htmXU H, GUAN Y J.Structural design of large aperture SiC mirror subassembly[J].Infrared and Laser Engineering, 2014, 43(S1):83-88.(in Chinese) http://www.cnki.com.cn/Article/CJFDTotal-HWYJ201402037.htm [8] BLOEMHOF E E, LAM J C, FERIA V A, et al..Extracting the zero-gravity surface figure of a mirror[J].SPIE, 2008, 7013:70133L_1-70133L_12. http://adsabs.harvard.edu/abs/2008SPIE.7013E..3LB [9] 戴斌飞.面形精度评价方法研究[D].苏州:苏州大学, 2005. http://cdmd.cnki.com.cn/article/cdmd-10285-2005135581.htm [10] SCHWERTZ K, Burge J H.Field Guide to Optomechanical Design and Analysis[M].Bellingham:SPIE Press, 2012:83. [11] 陈华.高精度面形检测中环境扰动因素分析[D].长春:中科院长春光学精密机械与物理研究所, 2011. http://cdmd.cnki.com.cn/Article/CDMD-80139-1012291449.htm [12] 于涛, 王永成, 代霜, 等.基于温度水平的空间相机主动热控系统[J].红外与激光工程, 2015, 44(1):249-253. http://www.cnki.com.cn/article/cjfdtotal-hwyj201501043.htmYU T, WANG Y CH, DAI SH, et al..Active thermal control system for space camera based on temperature level[J].Infrared and Laser Engineering, 2015, 44(1):249-253.(in Chinese) http://www.cnki.com.cn/article/cjfdtotal-hwyj201501043.htm [13] 任建岳, 陈长征, 何斌, 等.SiC和SiC/Al在TMA空间遥感器中的应用[J].光学精密工程, 2008, 16(12):2537-2543. http://www.cnki.com.cn/Article/CJFDTotal-GXJM200812043.htmREN J Y, CHEN CH ZH, HE B, et al..Application of SiC and SiC/Al to TMA optical remote sensor[J].Opt.Precision Eng., 2008, 16(12):2537-2543.(in Chinese) http://www.cnki.com.cn/Article/CJFDTotal-GXJM200812043.htm [14] 康健, 宣斌, 谢京江.表面改性碳化硅基底反射镜加工技术现状[J].中国光学, 2013(6):824-833.KANG J, XUAN B, XIE J J.Manufacture technology status of surface modified silicon carbide mirrors[J].Chinese Optics, 2013(6):824-833.(in Chinese) [15] 赵汝成, 包建勋.大口径轻质SiC反射镜的研究与应用[J].中国光学, 2014, 7(4):552-558. http://www.chineseoptics.net.cn/CN/abstract/abstract9163.shtmlZHAO R CH, BAO J X.Investigation and application of large scale lightweight SiC mirror[J].Chinese Optics, 2014, 7(4):552-558.(in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract9163.shtml [16] 齐光, 许艳军, 刘炳强.空间相机反射镜SiC/Al支撑板轻量化结构优化设计[J].红外与激光工程, 2014, 43(7):2214-2218. http://www.cnki.com.cn/Article/CJFDTotal-HWYJ201407032.htmQI G, XU Y J, LIU B Q.Lightweight structure design for SiC/Al supporting plate of space mirror[J].Infrared and Laser Engineering, 2014, 43(7):2214-2218.(in Chinese) http://www.cnki.com.cn/Article/CJFDTotal-HWYJ201407032.htm [17] 伞兵, 李景林, 孙斌.空间相机大口径反射镜轻量化技术及应用[J].红外与激光工程, 2015, 44(10):3043-3048. http://www.cnki.com.cn/Article/CJFDTotal-HWYJ201510031.htmSAN B, LI J L, SUN B.Light-weight technology and its application of large-aperture mirror in space camera[J].Infrared and Laser Engineering, 2015, 44(10):3043-3048.(in Chinese) http://www.cnki.com.cn/Article/CJFDTotal-HWYJ201510031.htm -

 下载:
下载:



计量
- 文章访问数: 2035
- HTML全文浏览量: 692
- PDF下载量: 748
- 被引次数: 0
