


Review of foreign space-based optical surveillance strategies for GEO objects
-
摘要: 空间目标观测策略是决定天基光学监视系统性能的关键因素之一,本文对国外已服役和在研的GEO目标天基光学监视系统及其观测策略进行了讨论。首先,概述了GEO目标天基光学监视技术的发展历程;然后,简要分析了GEO目标的轨道特性,并在此基础上讨论了主流的GEO目标监视策略;最后,针对近年来呈现出的监视系统小型化和自主运行的发展趋势,对SBO载荷与3U CubeSat星座的目标监视性能进行了仿真评估。实验结果表明:SBO载荷和CubeSat卫星均可探测1 m直径的GEO目标,单颗SBO载荷探测GEO目标比例大于51%,观测弧长和重访周期分别约1.2°和1.5天,CubeSat星座则可探测超过90%的GEO目标,平均观测弧长和重访周期分别大于67.1°和小于0.4天。由此可见微小卫星通过组网能实现对GEO目标的独立自主监视。Abstract: In view of the importance of the space object observation strategy in determining the performance of space-based optical surveillance systems, we discuss and analyze some overseas surveillance systems in service or under development and their relevant observation strategies in this paper. To start with, the development history of the space-based optical surveillance technology for GEO objects is summarized. Then, based on the analysis of the orbital characteristics of GEO objects, the mainstream surveillance strategies of GEO objects are discussed. Finally, on the ground of the trend of miniaturization and autonomization in the development of surveillance systems, the target surveillance performance of the SBO payload and the 3U CubeSats are evaluated. Experimental results show that the SBO payload and the 3U CubeSats can both detect GEO spherical objects with a diameter of 1 m. The coverage ratio of GEO objects detected by the SBO payload is more than 51%, and the average observation arc and detection gap between subsequent observations is around 1.2° and 1.5 days respectively. The CubeSat architecture can detect more than 90% GEO objects, and the average observation arc and revisit cycle is more than 67.1° and less than 0.4 days respectively. In conclusion, by forming constellation, minisatellites and microsatellites are able to implement autonomous surveillance of GEO objects.
-

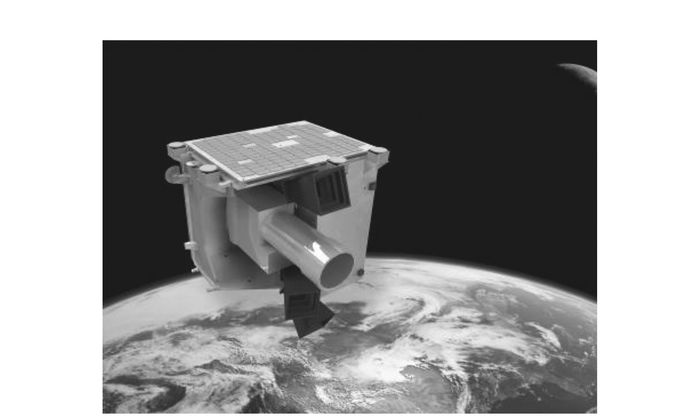
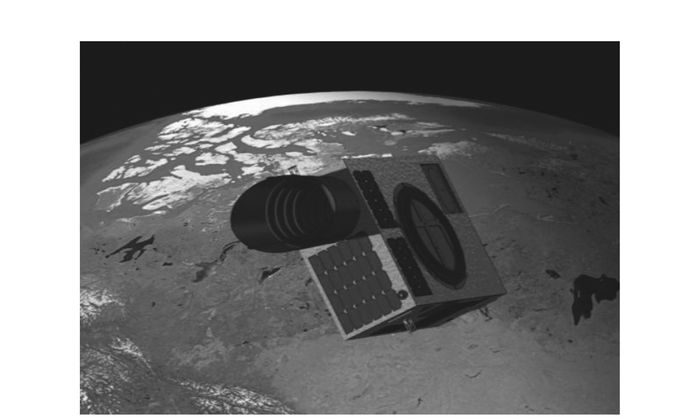
图 4 NEOSSat微型空间监视验证卫星
Figure 4. NEOSSat space surveillance demonstration microsatellite

图 7 GEO目标轨道半长轴和偏心率分布情况
Figure 7. Semi major axis and eccentricity distribution of GEO objects

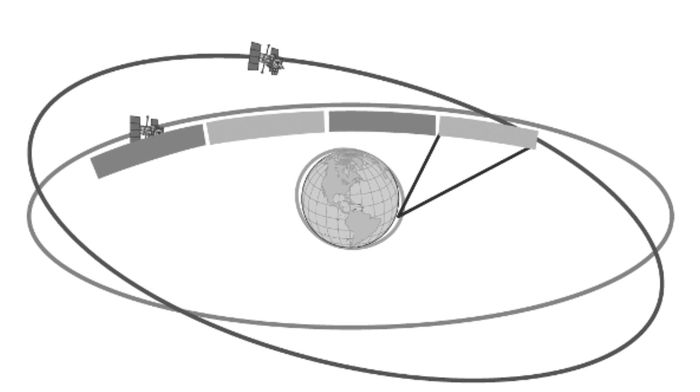
图 11 SBO望远镜覆盖的地球同步轨道带区域
Figure 11. Covered region in the GEO belt from the SBO telescope

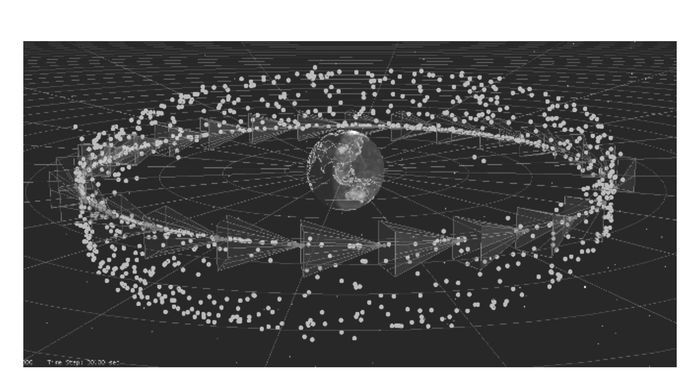
图 12 3U CubeSat星座结构和GEO目标监视场景
Figure 12. 3U CubeSat constellation architecture and GEO objects surveillance scenario

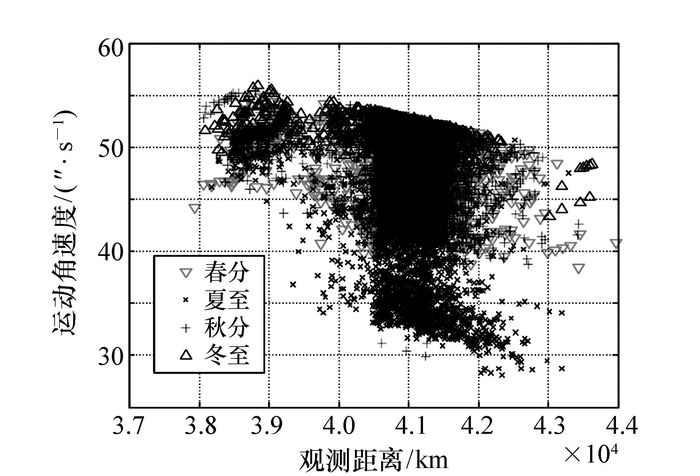
图 13 SBO观测GEO目标的距离和角速度分布
Figure 13. Distance and angular velocity distribution of GEO objects detected by the SBO sensor

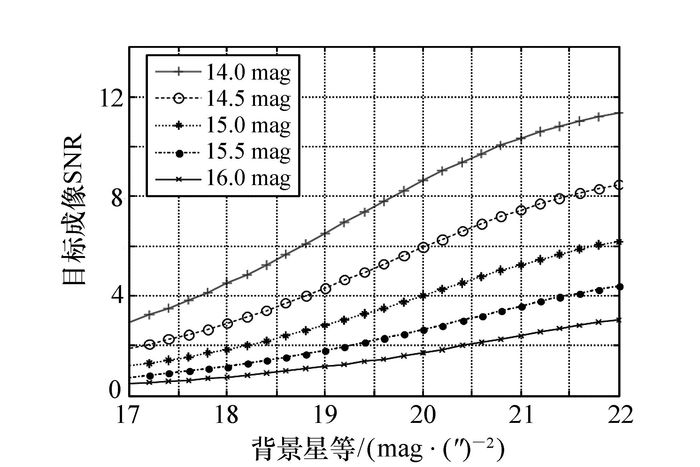
图 14 不同星等GEO目标成像SNR随天光背景星等变化
Figure 14. SNR of GEO object with different visual magnitude as function of sky background brightness

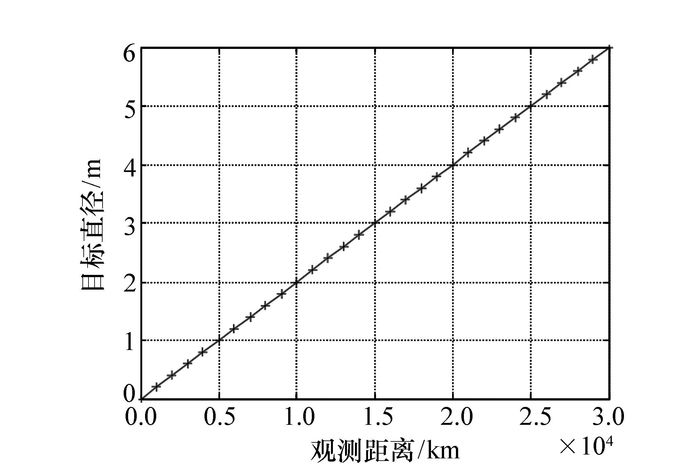
图 15 不同太阳相位角时SBO探测目标直径随观测距离变化
Figure 15. Diamater of spherical object detected by the SBO sensor under different phase angle as function of distance

图 16 不同观测距离下3U CubeSat卫星载荷探测目标直径
Figure 16. Diamater of spherical object detected by the 3U CubeSat as function of distance

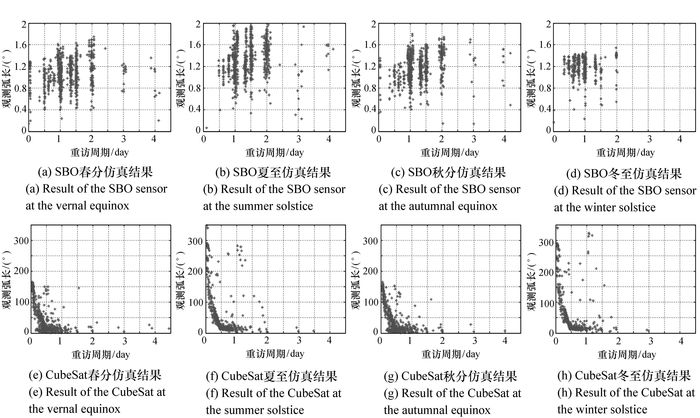
图 17 SBO载荷与CubeSat星座对GEO目标观测弧长和重访周期
Figure 17. Covered arc length and reacquisition period of GEO objects detected by the SBO payload and the CubeSat constellation
表 1 SBO载荷与CubeSat星座覆盖和探测GEO目标的数量
Table 1. Numbers of GEO objects covered and detected by the SBO payload and the CubeSat constellation
GEO目标覆盖与探测数量 春分五日 夏至五日 秋分五日 冬至五日 SBO载荷 覆盖 1 128(98.1%) 1 142(99.3%) 1 130(98.3%) 674(58.6%) 探测 1 023(89.0%) 1 037(90.2%) 1 029(89.5%) 587(51.0%) CubeSat星座 覆盖 1 118(97.2%) 1 118(97.2%) 1 118(97.2%) 1 118(97.2%) 探测 1 045(90.9%) 1 038(90.3%) 1 045(90.9%) 1 044(90.8%)  下载: 导出CSV
下载: 导出CSV
-
[1] 张景旭.国外地基光电系统空间目标探测的进展[J].中国光学, 2009, 2(1):10-16. http://www.chineseoptics.net.cn/CN/abstract/abstract8366.shtmlZHANG J X. Progress in foreign ground-based optoelectronic detecting system for space target detection[J]. Chinese Optis, 2009, 2(1):10-16.(in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract8366.shtml [2] NASA Orbital Debris Program Office. Satellite collision leaves significant debris clouds[EB/OL].[2016-10-15]. https://orbitaldebris.jsc.nasa.gov/quarterly-news/newsletter.html. [3] 王秀红, 李俊峰, 王彦荣.天基照相机监测空间目标定轨方法及精度分析[J].光学精密工程, 2013, 21(6):1394-1403. http://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201306005.htmWANG X H, LI J F, WANG Y R. Orbit determination and precision analysis of space object with space-based camera[J]. Opt. Precision Eng., 2013, 21(6):1394-1403.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201306005.htm [4] 吴连大.人造卫星与空间碎片的轨道和观测[M].北京:中国科学技术出版社, 2011.WU L D. Orbit and Observation of Artificial Satellite and Space Debris[M]. Beijing:China Science and Technology Press, 2011.(in Chinese) [5] HUEBSCHMAN R K. The MSX spacecraft system design[J]. Johns Hopkins APL Technical Digest, 1996, 17(1):41-48. http://www.jhuapl.edu/techdigest/TD/td1701/huebsch.pdf [6] DAVID C H, JOSEPH C C. The space-based visible sensor[J]. Johns Hopkins APL Technical Digest, 1996, 17(2):226-236. http://www.jhuapl.edu/techdigest/TD/td1702/harrison.pdf [7] GRANT H S, CURT V B, RAMASWAMY S, et al.. The space-based visible program[J]. Lincoln Laboratory Journal, 1998, 11(2):205-238. [8] JAYANT S, GRANT H S, CURT V B, et al.. Toward operational space-based space surveillance[J]. Lincoln Laboratory Journal, 2002, 13(2):309-334. [9] The Boeing Company. Space based space surveillance revolutionizing space awareness[EB/OL].[2016.08.20]. http://www.boeing.com/assets/pdf/defense-space/space/satellite/MissionBook.pdf. [10] Defence Research and Development Canada. Space-based observations of satellites from the MOST microsatellite[R]. Ottawa:DRDC, 2006. [11] PAUL M, LORNE O. Sapphire.Canada's answer to space-based surveillance of orbital objects[C]. Advanced Maui Optical and Space Surveillance Conference, Hawaii, USA, 2008:1-8. [12] HACKETT J, BRISBY R, SMITH K. Overview of the Sapphire payload for space surveillance[J]. SPIE, 2012, 8385:83850W-11. https://www.deepdyve.com/lp/spie/overview-of-the-sapphire-payload-for-space-surveillance-SlIU4ktpyx [13] SCOTT A, HACKETT J, MAN K. On-orbit results for Canada's Sapphire optical payload[C]. Advanced Maui Optical and Space Surveillance Conference, Hawaii, USA, 2013:1-7. [14] WALLACE B, PINKNEY F, SCOTT R, et al.. The near earth object surveillance satellite (NEOSSat)[J]. SPIE, 2004, 5578:1-7. http://adsabs.harvard.edu/abs/2004SPIE.5578....1W [15] WALLACE B, SCOTT R, BEDARD D, et al.. The near-earth orbit surveillance satellite[J]. SPIE, 2006, 6265:626526-10. [16] SCOTT R, WALLACE B, SALE M, et al.. Toward microsatellite based space situational awareness[C]. Advanced Maui Optical and Space Surveillance Conference, Hawaii, USA, 2013:1-10. [17] KRUTZ U, JAHN H, K HRT E, et al.. Radiometric considerations for the detection of space debris with an optical sensor in LEO as a secondary goal of the Asteroid Finder mission[J]. Acta Astronautica, 2011, 69:297-306. doi: 10.1016/j.actaastro.2011.04.003 [18] FINDLAY R, E MANN O, GRUNDMANN J T, et al.. A space-based mission to characterize the IEO population[J]. Acta Astronautica, 2013, 90:33-40. doi: 10.1016/j.actaastro.2012.08.004 [19] United States Naval Observatory. Joint Milli-Arcsecond Pathfinder Survey (J-MAPS) Mission:the application of high metric accuracy astrometry to space situational awareness[R]. Washington:USNO, 2006. [20] United States Naval Observatory. The Joint Milli-Arcsecond Pathfinder Survey (J-MAPS) Mission:Application for Space Situational Awareness[R]. Washington:USNO, 2008. [21] FLOHRER T, PELTONEN J, KRAMER A, et al.. Space-based optical observations of space debris[C]. Proceedings of the Fourth European Conference on Space Debris, Darmstadt, Germany:ECSD, 2005:165-170. [22] FLOHRER T, KRAG H, KLINKRAD H, et al.. Feasibility of performing space surveillance tasks with a proposed space-based optical architecture[J]. Advances in Space Research, 2011, 47:1029-1042. doi: 10.1016/j.asr.2010.11.021 [23] MORRIS K, RICE C, WOLFSON M. CubeSat integration into the space situational awareness architecture[C]. Advanced Maui Optical and Space Surveillance Conference, Hawaii, USA:AMOS, 2013:1-11. [24] MORRIS K, RICE C, LITTLE E. Relative cost and performance comparison of GEO space situational awareness architectures[C]. Advanced Maui Optical and Space Surveillance Conference, Hawaii, USA:AMOS, 2014:1-11. [25] FLOHRER T, SCHILDKNECHT T, MUSCI R. Proposed strategies for optical observations in a future European space surveillance network[J]. Advances in Space Research, 2008, 41:1010-1021. doi: 10.1016/j.asr.2007.02.018 [26] 周美江, 朱振才, 杨根庆, 等.天基光学同步带目标监视跟踪模式[J].中国空间科学技术, 2015, 32(3):35-43. http://www.cnki.com.cn/Article/CJFDTOTAL-ZGKJ201503006.htmZHOU M J, ZHU Z C, YANG G Q, et al.. GEO objects surveillance and tracking mode of space-based optical system[J]. Chinese Space Science and Technology, 2015, 32(3):35-43.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-ZGKJ201503006.htm [27] 陈冰儿, 熊建宁.空间碎片天基光学观测平台设计[J].天文学报, 2016, 57(2):228-240. http://www.cnki.com.cn/Article/CJFDTOTAL-TWXB201602010.htmCHEN B E, XIONG J N. The platform design of space-based optical observations of space debris[J]. Acta Astronomica Sinica, 2016, 57(2):228-240.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-TWXB201602010.htm [28] HU Y P, LI K B, XU W. A novel space-based observation strategy for GEO objects based on daily pointing adjustment of multi-sensors[J]. Advances in Space Research, 2016, 58:505-513. doi: 10.1016/j.asr.2016.05.023 -

 下载:
下载:









计量
- 文章访问数: 3219
- HTML全文浏览量: 1356
- PDF下载量: 1011
- 被引次数: 0
