


Research on matching performance of SIFT and SURF algorithms for high resolution remote sensing image
-
摘要: 遥感图像匹配是图像校正、拼接的基础。由于遥感图像特征相似度大,重叠区域小,遥感图像对匹配算法的要求更高。本文首先从特征检测、特征描述和特征匹配三个方面,比较了SIFT算法和SURF算法在计算速度和准确度方面性能,然后研究了算法对遥感图像重叠度、度量距离的要求,并针对SURF算法对特征方向误差敏感的特点,提出一种oSURF算法;最后利用卫星1A级条带遥感图像分析各个算法优劣性。测试结果表明,相比于SIFT算法,SURF算法计算速度为SIFT的3倍,需要的图像重叠宽度仅为1.25倍描述向量尺寸,而在保证同样匹配率的情况下,SIFT算法则需要图像重叠宽度为1.5倍描述向量尺寸。本文提出的oSURF算法在保证计算速度的同时,准确度相对于SURF算法提升5%~10%,因此,oSURF算法更适合1A级条带遥感图像的拼接。Abstract: Image matching is the basis of image rectification and mosaic. Because of higher features similarity and smaller overlapped area than ordinary images, the remote sensing images have higher requirements on matching algorithm in both performance and iteration speed. The performances in three aspects:feature detection, feature description and feature matching, are analyzed between the SIFT algorithm and the SURF algorithm in terms of speed and accuracy. The requirements of the degree of overlapping between remote sensing images and the matching distance of the genvector is discussed as well. In view of the characteristic that SURF algorithm is sensitive to the error in feature detection, oSURF algorithm is presented in this paper. Finally, the advantages and disadvantages of each algorithm are analyzed by using satellite remote sensing data of level 1A. The results show that iteration speed of SURF algorithm is three times faster than SIFT algorithm. Under the same matching rate, the width of overlapped area on image required in SURF algorithm is 1.25 times of the dimension of genvector but 1.5 times in SIFT, and the accuracy of oSURF algorithm is increased by 5%~10% compared with SURF algorithm in the same computation speed, which indicate that oSURF is more suitable for remote sensing image stitching.
-
Key words:
- remote sensing image /
- feature matching /
- SIFT /
- SURF /
- degree of overlapping
-

图 4 重叠区域不同时同名点概率变化
Figure 4. Probability change of Homologous Points with the overlap region
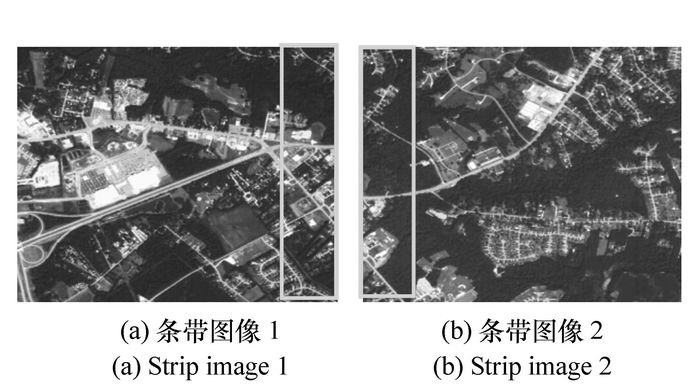
表 1 SIFT和SURF算法特征检测结果
Table 1. Detection result of SIFT and SURF algorithm
图像 算法 特征点数/个 检测时间/s 条带图像1 SIFT 438 5.013 SURF 523 1.596 条带图像2 SIFT 480 5.326 SURF 573 1.869  下载: 导出CSV
下载: 导出CSV
表 2 不同算法特征向量描述结果
Table 2. Feature description result of different algorithms
算法 图像 特征向量 特征点变化 描述时间 10个向量描述时间 SIFT 条带图像1 1 119 +681 12.962 0.116 条带图像2 1 451 +971 13.863 0.096 SURF64 条带图像1 464 -59 3.015 0.065 条带图像2 520 -53 3.368 0.065 SURF128 条带图像1 464 -59 3.213 0.069 条带图像2 520 -53 3.473 0.067
下载: 导出CSV
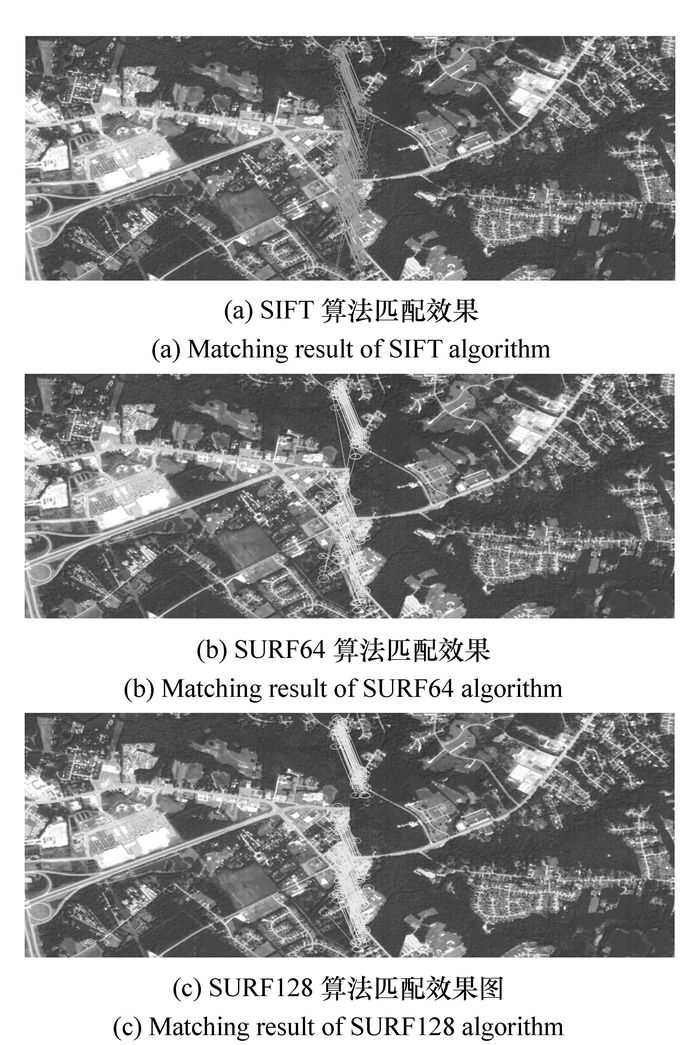
表 3 不同算法特征匹配结果比较
Table 3. Matching result of different algorithms
算法 匹配点 正确率 匹配时间 总时间 SIFT 286 0.979 1.152 38.521 SURF64 84 0.896 0.310 11.514 SURF128 120 0.946 7 0.425 12.581
下载: 导出CSV
表 4 oSURF算法特征匹配结果比较
Table 4. Matching result of oSURF algorithm
算法 条带1描述向量 条带2描述向量 匹配点数 准确度 总时间 oSURF 814 963 289 0.965 4 12.926
下载: 导出CSV
-
[1] LOWE D G. Object recognition from local scale-invariant features[C]. International Conference on Computer Vision, Kerkyra, Greece:ICCV, 1999:1150-1157. [2] LOWE D G. Distinctive image features from scale-invariant keypoints[J]. International J. Compute Vision, 2004, 60(60):91-110. http://nichol.as/papers/Lowe/Distinctive%20Image%20Features%20from%20Scale-Invariant.pdf [3] BAY H, TUYTELAARS T, GOOL L. SURF:speeded up robust features[J]. Computer Vision & Image Understanding, 2006, 110(3):404-417. http://dev.ipol.im/~morel/Dossier_MVA_2010_Cours_Transparents_Documents/Cours_4_document_SURF_paper.pdf [4] BAY H, ESS A, TUYTELAARS T, et al.. Speeded-Up Robust Features (SURF)[J]. Computer Vision & Image Understanding, 2008, 110(3):346-359. http://www.micc.unifi.it/delbimbo/wp-content/uploads/2011/03/reference_papers/Bay.pdf [5] LUO J, GWUN O. A Comparison of SIFT, PCA-SIFT and SURF[J]. J. Business Education, 2009, 3(4):143-152. [6] 索春宝, 杨东清, 刘云鹏.多种角度比较SIFT、SURF、BRISK、ORB、FREAK算法[J].北京测绘, 2014, (4):23-26. http://www.cnki.com.cn/Article/CJFDTOTAL-BJCH201404006.htmSUO CH B, YANG D Q, LIU Y P. Comparison of SIFT, SURF, BRISK, ORB and FREAK algorithms in various aspects[J]. Beijing Surveying and Mapping, 2014, (4):23-26.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-BJCH201404006.htm [7] 安维胜, 余让明, 伍玉铃.基于FAST和SURF的图像配准算法[J].计算机工程, 2015, 41(10):232-235. doi: 10.3969/j.issn.1000-3428.2015.10.043AN W SH, YU R M, WU Y L. Image registration algorithm based on FAST and SURF[J]. Computer Engineering, 2015, 41(10):232-235.(in Chinese) doi: 10.3969/j.issn.1000-3428.2015.10.043 [8] 王新华, 黄玮, 欧阳继红.多探测器拼接成像系统实时图像配准[J].中国光学, 2015, 8(2):211-219. http://www.chineseoptics.net.cn/CN/abstract/abstract9257.shtmlWANG X H, HUANG W, OUYANG J H. Real-time image registration of the multi-detectors mosaic imaging system[J]. Chinese Optics, 2015, 8(2):211-219.(in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract9257.shtml [9] 许佳佳.结合Harris与SIFT算子的图像快速配准算法[J].中国光学, 2015, 8(4):574-581. http://www.chineseoptics.net.cn/CN/abstract/abstract9285.shtmlXU J J. Fast image registration method based on Harris and SIFT algorithm[J]. Chinese Optics, 2015, 8(4):574-581.(in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract9285.shtml [10] 张云生, 邹峥嵘.基于改进ORB算法的遥感图像自动配准方法[J].国土资源遥感, 2013, 25(3):20-24. doi: 10.6046/gtzyyg.2013.03.04ZAHNG Y SH, ZOU ZH R. Automatic registration method for remote sensing images based on improved ORB algorithm[J]. Remote Sensing for Land and Resources, 2013, 25(3):20-24.(in Chinese) doi: 10.6046/gtzyyg.2013.03.04 [11] 罗楠, 孙权森, 耿蕾蕾, 等.一种扩展SURF描述符及其在遥感图像配准中的应用[J].测绘学报, 2013, 42(3):383-388. http://www.cnki.com.cn/Article/CJFDTOTAL-CHXB201303012.htmLUO N, SUN Q S, GENG L L, et al.. An extended SURF descriptor and its application in remote sensing images registration[J]. Acta Geodaetica et Cartographica Sinica, 2013, 42(3):383-388.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-CHXB201303012.htm [12] 闫利, 陈林.一种改进的SURF及其在遥感影像匹配中的应用[J].武汉大学学报:信息科学版, 2013, 38(7):770-773. http://www.cnki.com.cn/Article/CJFDTOTAL-WHCH201307005.htmYAN L, CHEN L. A modified SURF descriptor and its application in remote sensing images matching[J]. Geomatics and Information Science of Wuhan University, 2013, 38(7):770-773.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-WHCH201307005.htm [13] 葛盼盼, 陈强.基于SURF特征提取的遥感图像自动配准[J].计算机系统应用, 2014, 23(3):16-24. http://www.cnki.com.cn/Article/CJFDTOTAL-XTYY201403003.htmGE P P, CHEN Q. Remote sensing image automatic registration based on SURF feature extraction[J]. Computer Systems & Applications, 2014, 23(3):16-24.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-XTYY201403003.htm [14] LINDEBERG T. Scale-space theory:a basic tool for analyzing structures at different scales[J]. J. Applied Statistics, 1994, 21(1):225-270. doi: 10.1080/757582976 [15] VIOLA P, JONES M. Rapid object detection using a boosted cascade of simple features[C]. Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Kauai, HI, USA, 2001:511-518 [16] 翟优, 曾峦, 熊伟.不同局部邻域划分加速鲁棒特征描述符的性能分析[J].光学精密工程, 2013, 21(9):2395-2404. http://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201309026.htmZHAI Y, ZENG L, XIONG W. Performance analysis of SURF descriptor with different local region partitions[J]. Opt. Precision Eng., 2013, 21(9):2395-2404.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201309026.htm [17] 孙浩, 王程, 王润生.局部不变特征综述[J].中国图象图形学报, 2011, 16(2):141-151. doi: 10.11834/jig.20110207SUN H, WANG CH, WANG R SH. A review of local invariant features[J]. J. Image and Graphics, 2011, 16(2):141-151.(in Chinese) doi: 10.11834/jig.20110207 [18] 聂海涛, 龙科慧, 马军, 等.采用改进尺度不变特征变换在多变背景下实现快速目标识别[J].光学精密工程, 2015, 23(8):2349-2356. http://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201508029.htmNIE H T, LONG K H, MA J, et al.. Fast object recognition under multiple varying background using improved SIFT method[J].Opt. Precision Eng., 2015, 23(8):2349-2356.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201508029.htm [19] MIKOLAJCZYK K, SCHMID C. A performance evaluation of local descriptors[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2005, 27(10):1615-1630. doi: 10.1109/TPAMI.2005.188 [20] FISCHLER M, BOLLES R. Random Sample Consensus:A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography[M]. Burlington:Morgan Kaufmann Publishers Inc., 1987. -

 下载:
下载:









计量
- 文章访问数: 2518
- HTML全文浏览量: 704
- PDF下载量: 708
- 被引次数: 0
