


Application of tracking differentiator to gyro signal denoising
-
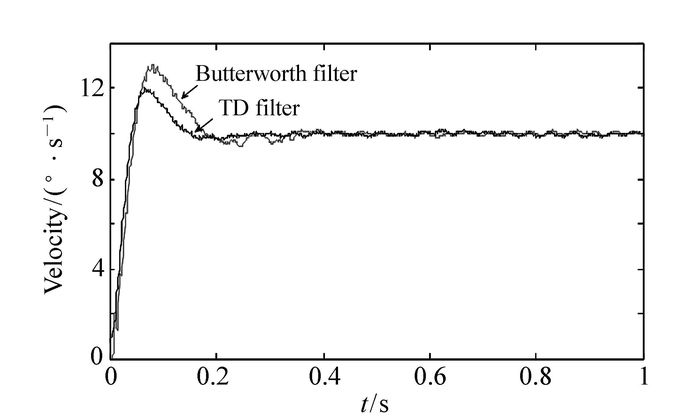
摘要: 为了提高航空光电稳定平台的视轴稳定精度,采用跟踪微分器作为滤波器,对输入信号进行滤波,改善随机噪声对控制精度带来的负面影响。跟踪微分器会产生相位延迟,根据它得到的滤波信号及其微分信号,采用预报方法对滤波后的信号进行补偿。算法不依赖对象模型,计算量较小,易于实现。本文阐述了该算法的离散数学表达式,给出数值仿真分析,并在某型航空光电稳定平台上进行实验验证。结果表明:相较于巴特沃斯滤波器,跟踪微分器提高了阶跃响应的性能,最大超调量减少10.5%,上升时间缩短了4.5 ms,调整时间缩短50 ms。基本满足控制系统的实时性、快速性、稳定可靠、精度高、抗干扰能力强等要求。研究表明跟踪微分器对于航空光电稳定平台的精度提高,有比较好的实用价值。Abstract: In order to improve the aviation optical axis stabilization accuracy of the photoelectric stabilized platform, we use tracking differentiator as filter to decrease the negative effects of random noise on the control accuracy. on the basis of the filtered signals and their differentiated signals, the phase delays after being filtered are compensated by predicting. This algorithm is model-independent and easy to implement with small calculation. In this paper, the discrete mathematics of the algorithm is described, and the numerical simulation and experimental verification are conducted and applied to the photoelectric stabilized platform for aviation. The results show that the tracking differentiator, compared with the Butterworth filter, can improve the performance of the step response, shorten the maximum overshoot by 10.5%, cut down the rise time by 4.5 ms, shorten the setting time by 50 ms. The simulation and experiment proved the validity and practicability of the algorithm. It can meet the system requirements for real time, higher precision and rapid speed, as well as strong anti-jamming and stabilization. It also indicates that the tracking differentiator provide good value for the improvement of the precision of the photoelectric stabilized platform for aviation.
-

图 1 航空光电稳定平台的系统框图
Figure 1. Block diagram of system with photoelectric stabilized platform for aviation

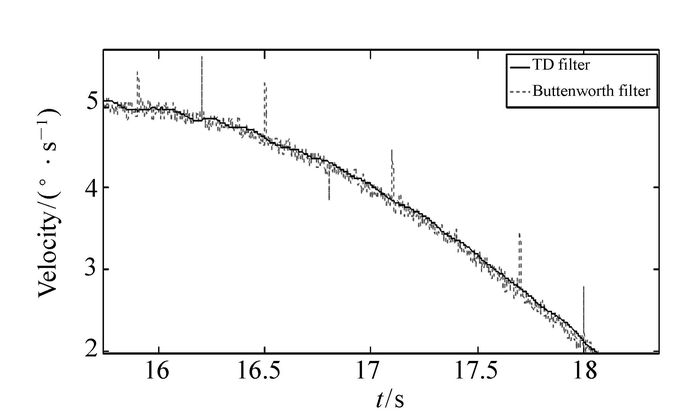
图 9 两种滤波器对信号野值的剔除能力
Figure 9. Contrast of two kinds of filtes′ ability in removing abnormal value

图 10 航空光电稳定平台和飞行模拟转台
Figure 10. Aerial photoelectrical stabilized platform and swing table
表 1 巴特沃斯控制下的系统阶跃响应性能
Table 1. Step response performance of indicators with Butterworth filter
Velocity/(°·s-1) Rise time/ms Setting time/ms Overshoot/% 10 45.7 198.7 28.6 20 54.9 231.8 27.8 30 62.2 244.2 28.1 40 69.8 206.3 27.2 50 76.4 213.9 25.7  下载: 导出CSV
下载: 导出CSV
表 2 跟踪微分器控制下的系统阶跃响应性能
Table 2. Step response performance of indicators with tracking differentiator
Velocity/(°·s-1) Rise time/ms Setting time/ms Overshoot/% 10 41.2 148.7 18.1 20 51.1 189.3 19.6 30 58.7 196.7 18.6 40 66.0 155.2 17.5 50 73.4 162.4 17.7
下载: 导出CSV
-
[1] 孙树红, 赵长海, 万秋华, 等.小型光电编码器自动检测系统[J].中国光学, 2013, 6(4):600-606. http://www.chineseoptics.net.cn/CN/abstract/abstract9015.shtmlSUN SH H, ZHAO CH H, WAN Q H, et al.. Automatic detection system for miniature photoelectrical encoder[J]. Chinese Optics, 2013, 6(4):600-606.(in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract9015.shtml [2] 李贤涛, 张葆, 沈宏海.基于自抗扰控制技术提高航空光电稳定平台的扰动隔离度[J].光学精密工程, 2014, 22(8):2223-2231. http://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201408033.htmLI X T, ZHANG B, SH H H. Improvement of isolation degree of aerial photoelectrical stabilized platform based on ADRC[J]. Opt. Precision Eng., 2014, 22(8):2223-2231.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201408033.htm [3] 李慧, 吴军辉, 朱霞, 等.速率陀螺式激光导引头稳定跟踪原理分析与仿真[J].红外与激光工程, 2011, 40(7):1337-1341. http://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ201107032.htmLI H, WU J H, ZHU X, et al.. Analysis and tracking principle for rate gyroscope laser seeker[J]. Infrared and Laser Engineering, 2011, 40(7):1337-1341.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ201107032.htm [4] 丛爽, 孙光立, 邓科, 等.陀螺稳定平台的自抗扰及其滤波控制[J].光学精密工程, 2016, 24(1):169-177. http://cdmd.cnki.com.cn/Article/CDMD-10358-1014299507.htmCONG SH, SUN G L, DENG K, et al.. Active disturbance rejection and filter control of gyro-stabilized platform[J]. Opt. Precision Eng., 2016, 24(1):169-177.(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10358-1014299507.htm [5] KIRKKO-JAAKKOLA M, COLLIN J, TAKALA J. Bias prediction for MEMS gyroscopes[J]. IEEE Sensors Journal, 2012, 12(6):2157-2163. doi: 10.1109/JSEN.2012.2185692 [6] PARK S, HOROWITZ R. Adaptive control for the conventional mode of operation of MEMS gyroscopes[J]. Microelectromechanical Systems J., 2003, 12(1):101-108. doi: 10.1109/JMEMS.2002.807468 [7] 汪永阳, 戴明, 丁策, 等.大光电稳定平台中高阶扰动观测器的应用[J].光学精密工程, 2015, 23(2):459-466. http://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201502020.htmWANG Y Y, DAI M, DING C, et al.. Application of high order observer in EO stabilized platform[J]. Opt. Precision Eng., 2015, 23(2):459-466.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201502020.htm [8] 孙辉.机载光电平台目标定位与误差分析[J].中国光学, 2013, 6(6):912-918. http://www.chineseoptics.net.cn/CN/abstract/abstract8991.shtmlSUN H. Target localizationand error analysis for airborne electro-optical platform[J]. Chinese Optics, 2013, 6(6):912-918.(in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract8991.shtml [9] 韩京清, 王伟.非线性跟踪-微分器[J].系统科学与数学, 1994, 14(2):177-183. http://cdmd.cnki.com.cn/Article/CDMD-10530-2004138834.htmHAN J Q, WANG W. Nonlinear tracking differentiator[J]. Systems Science and Mathematical Science, 1994, 14(2):177-183.(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10530-2004138834.htm [10] 韩京清, 袁露林.跟踪-微分器的离散形式[J].系统科学与数学, 1999, 19(3):268-273. http://www.cnki.com.cn/Article/CJFDTOTAL-STYS199903002.htmHAN J Q, YUAN L L. Discrete tracking differentiator[J]. Systems Science and Mathematical Science, 1999, 14(3):268-273.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-STYS199903002.htm [11] 韩京清.自抗扰控制技术[J].前沿科学, 2007, 1(1):24-31. http://www.cnki.com.cn/Article/CJFDTOTAL-XXJK201214102.htmHAN J Q. Active disturbance rejection control technique[J]. Frontier Science, 2007, 1(1):24-31.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-XXJK201214102.htm [12] TIAN D P, SH H H, DAI M. Improving the rapidity of nonlinear tracking differentiator via feedforward[J]. IEEE Transactions on Industrial Electronics, 2014, 61(7):3736-3743. doi: 10.1109/TIE.2013.2262754 [13] 韩京清, 黄远灿.二阶跟踪-微分器的频率特性[J].数学的实践与认识, 2003, 03:71-74. http://www.cnki.com.cn/Article/CJFDTOTAL-SSJS200303013.htmHAN J Q, HUANG Y C. Frequency characteristic of second-order tracking-differentiator[J]. Mathematics in Practice and Theory, 2003, 33(3):71-74.(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-SSJS200303013.htm [14] 朱承元, 杨涤, 荆武兴.跟踪微分器参数与输入输出信号幅值频率关系[J].电机与控制学报, 2005, 9(4):376-379. http://www.cnki.com.cn/Article/CJFDTOTAL-DJKZ200504019.htmZHU CH Y, YANG D, JING W X. Relation equations among the parameters of tracking-differentiator and the amplitude and frequency of its input-output signals[J]. Electric Machines and Control, 2005, 9(4):376-379.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-DJKZ200504019.htm -

 下载:
下载:







计量
- 文章访问数: 2457
- HTML全文浏览量: 624
- PDF下载量: 812
- 被引次数: 0
