


-
摘要: 为研究在重力作用下主镜支撑系统对经纬仪主镜处于不同工作角度时面形误差的影响,以600 mm口径主镜为研究对象,利用Abaqus软件分别建立了600 mm主镜在加工状态下和工作状态下的有限元支撑模型,并进行了重力变形分析,然后借助4D干涉仪对在不同支撑系统下的主镜进行相关的面形检测。实验结果表明,在吊带支撑系统和主镜室支撑系统下,主镜的自身面形误差RMS为16.18 nm和16.90 nm。利用有限元分析了理想状态的主镜在不同仰角工况下的面形误差,结合主镜自身的面形误差,计算得到了主镜面形误差在光轴由水平变化到竖直的过程中逐渐变大,其RMS最大为19.58 nm,表明该主镜室支撑系统具有良好支撑效果,可满足工程要求,同时也验证了主镜室支撑系统有限元理论模型的准确性。Abstract: In order to study the effect of support system on surface deformation error of theodolite primary mirror at different working angles under gravity, the 600 mm primary mirror finite element support models in processing state and working state are built using Abaqus software, and the gravity deformation analysis of the primary mirror is also carried out. Then, the related surface deformation tests of the primary mirror at different support systems are carried out using 4D interferometer. As a result, the surface deformation errors RMS of the primary mirror at strip support system and mirror room support system are 16.18 nm and 16.90 nm, respectively. The surface deformation errors of ideal primary mirror in varied elevation angles are analyzed by the finite element method. Combining with the surface deformation error in itself, it is found that the surface deformation error of the primary mirror increases gradually in the process of the optical axis changing from horizontal direction to vertical direction, and the maximum RMS is 19.58 nm. This shows the primary mirror chamber support system has an excellent supporting performance and can satisfy the engineering requirements. It is also verified that the finite element theoretical model of the primary mirror chamber support system is accurate.
-
Key words:
- photoelectric theodolite /
- primary mirror /
- support system /
- finite element /
- surface deformation test
-

图 2 吊带支撑下主镜的位移变化云图
Figure 2. Displacement pattern of primary mirror under strip support

图 3 600 mm主镜支撑结构排布方式
Figure 3. Support structure configuration of 600 mm primary mirror

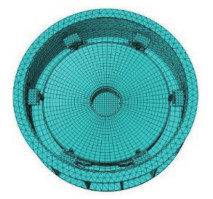
图 4 主镜室支撑系统的有限元模型
Figure 4. Finite element model of primary mirror chamber support system

图 5 光轴水平时主镜的位移变化云图
Figure 5. Displacement pattern of primary mirror when optical axis is horizontal

图 6 不同仰角下主镜的面形误差RMS
Figure 6. Surface deformation error RMS of primary mirror at different elevation angles

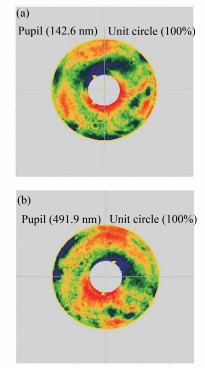
图 7 (a)吊带支撑系统下和(b)主镜室支撑系统下检测到的主镜面形
Figure 7. Primary mirror surface tested at (a) strip support system and (b) primary mirror chamber support system

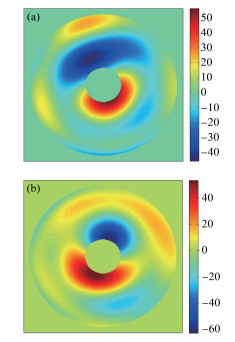
图 8 主镜在(a)吊带支撑系统和(b)主镜室支撑系统下的自身面形云图
Figure 8. Surface deformation pattern of primary mirror at (a) strip support system and (b) mirror chamber support system

图 9 主镜在实际工作状态下的面形误差RMS
Figure 9. Surface deformation error RMS of primary mirror in working state
表 1 主镜的材料属性
Table 1. Material parameters of primary mirror
材料 杨氏模量
E/MPa密度ρ/
(kg/mm3)泊松比μ 微晶玻璃 90 300 2 530 0.24  下载: 导出CSV
下载: 导出CSV
表 2 铁镍合金4J32和橡胶的材料参数
Table 2. Material parameters of iron-nickel alloy 4J32 and rubber
材料 杨氏模量
E/MPa密度ρ/
(kg/mm3)泊松比μ 4J32 141 000 8 100 0.25 橡胶 7.84 1 000 0.49
下载: 导出CSV
-
[1] 赵学颜, 李迎春. 靶场光学测量[D]. 北京: 装备指挥技术学院, 2001.ZHAO X Y, LI Y CH. Range optical measurement[D]. Beijing:The Academy of Equipment Command & Technology, 2001. (in Chinese) [2] 马品仲.大型天文望远镜设计和研究[J].应用光学, 1994, 15(3):6-11. http://www.cnki.com.cn/Article/CJFDTOTAL-JSJC200606098.htmMA P ZH. Design and study on the large astronomical telescope[J]. Applied Optics, 1994, 15(3):6-11. (in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-JSJC200606098.htm [3] 杨佳林, 黄巧文.大口径反射镜结构参数优化设计[J].中国空间科学技术, 2011(4):77-33. http://www.cnki.com.cn/Article/CJFDTOTAL-ZGKJ201104012.htmYANG J L, HUANG Q W. Optimized design of structure parameters for large aperture mirrors[J]. Chinese Space Science and Technology, 2001(4):77-83. (in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-ZGKJ201104012.htm [4] 李福, 阮萍, 赵葆常.重力作用下平面反射镜变形研究[J].光子学报, 2005, 34(2):272-275. http://www.cnki.com.cn/Article/CJFDTOTAL-GZXB20050200T.htmLI F, RUAN P, ZHAO B CH. Study on the surface deformation of flat reflector under gravity load[J]. Acta Photonica Sinica, 2005, 34(2):272-275. (in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-GZXB20050200T.htm [5] 戴晓霖, 鲜浩, 唐金龙, 等. 8 m能动薄主镜侧支撑设计[J].光学学报, 2015, 35(6):255-262.DAI X L, XIAN H, TANG J L, et al.. Designing of lateral support system for an 8 m active thin mirror[J]. Acta Optical Sinica, 2015, 35(6):255-262. (in Chinese) [6] 邵亮, 吴小霞, 杨飞, 等. SiC轻量化主镜液压whiffletree支撑系统的改进[J].红外与激光工程, 2014, 43(11):3820-3824. http://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ201411054.htmSHAO L, WU X X, YANG F, et al.. Improvement on hydraulic whiffletree support system for SiC lightweight primary mirror[J]. Infrared & Laser Engineering, 2014, 43(11):3820-3824. (in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ201411054.htm [7] 伞晓刚, 孙宁, 卓仁善, 等.大口径光电经纬仪主反射镜支撑结构设计[J].光学精密工程, 2013, 21(12):3111-3117. http://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201312018.htmSAN X G, SUN N, ZHUO R SH, et al.. Design of supporting structure for primary mirror of large aperture theodolite[J]. Optics and Precision Engineering, 2013, 21(12):3111-3117. (in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201312018.htm [8] 李宗轩, 金光, 张雷, 等. 3.5 m口径空间望远镜单块式主镜技术展望[J].中国光学, 2014, 7(4):532-541. http://www.chineseoptics.net.cn/CN/abstract/abstract9165.shtmlLI Z X, JIN G, ZHANG L, et al.. Overview and outlook of monolithic primary mirror of spaceborne telescope with 3.5 m aperture[J].Chinese Optics, 2014, 7(4):532-541. (in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract9165.shtml [9] 张景旭.地基大口径望远镜系统结构技术综述[J].中国光学, 2012, 5(4):327-336. http://www.chineseoptics.net.cn/CN/abstract/abstract8856.shtmlZHANG J X. Overview of structure technologies of large aperture ground-based telescopes[J].Chinese Optics, 2012, 5(4):327-336. (in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract8856.shtml [10] 吴小霞, 杨洪波, 张景旭, 等.大口径球面镜支撑系统的优化设计[J].光子学报, 2009, 38(1):129-132. http://www.cnki.com.cn/Article/CJFDTOTAL-GZXB200901028.htmWU X X, YANG H B, ZHANG J X, et al.. Optimal design of support system for the large-aperture sphere mirror[J]. Acta Photonica Sinica, 2009, 38(1):129-132. (in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-GZXB200901028.htm [11] 王富国, 杨洪波, 杨飞, 等.大口径主镜轴向支撑点位置优化分析[J].红外与激光工程, 2007, 36(6):877-880. http://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ200706030.htmWANG F G, Yang H B, YANG F, et al.. Optimization and analysis for the axis support points position of the large aperture mirrors[J]. Infrared & Laser Engineering, 2007, 36(6):877-880. (in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ200706030.htm [12] 范李立, 张景旭, 姜皓, 等.极轴式望远镜主镜支撑设计[J].红外与激光工程, 2011, 40(3):476-479. http://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ201201033.htmFAN L, ZHANG J X, JIANG H, et al.. Design of the primary mirror support of equatorial telescope[J]. Infrared & Laser Engineering, 2011, 40(3):476-479. (in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ201201033.htm [13] 庄茁, 由小川, 廖剑晖, 等.基于ABAQUS的有限元分析和应用[M].北京:清华大学出版社, 2011.ZHUANG ZH, YOU X CH, LIAO J H, et al.. Based on ABAQUS finite element analysis and application[M]. Beijing:Tsinghua Unversity Press, 2011. (in Chinese) [14] 谢军, 曹立华, 韩光宇, 等.考虑接触边界条件的经纬仪主镜面形误差分析[J].光子学报, 2014, 43(12):1212004. http://www.cnki.com.cn/Article/CJFDTOTAL-GZXB201412025.htmXIE J, CAO L H, HAN G Y, et al.. The surface error analysis of theodolite primary mirror considering boundary condition[J]. Acta Photonica Sinica, 2014, 43(12):1212004. (in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-GZXB201412025.htm [15] 邵亮, 吴小霞, 陈宝刚, 等. SiC轻量化主镜的被动支撑系统[J].光学精密工程, 2015, 23(5):1380-1386. http://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201505023.htmSHAO L, WU X X, CHEN B G, et al.. Passive support system of light-weighted SiC primary mirror[J]. Optics and Precision Engineering, 2015, 23(5):1380-1386. (in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201505023.htm -

 下载:
下载:







计量
- 文章访问数: 2603
- HTML全文浏览量: 987
- PDF下载量: 456
- 被引次数: 0
