


Design and analysis of adjustment mechanism with slit diaphragm flexures for optical elements
-
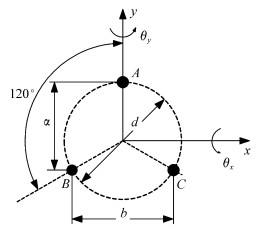
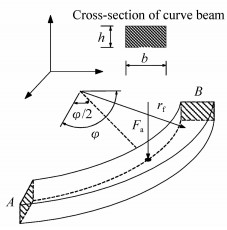
摘要: 设计了一种狭缝柔性结构的光学元件调节机构,使光学元件在具备较高调节精度的同时,保持较高的导向精度。采用弹性力学应力函数法分析了狭缝柔性结构的刚度,以径向刚度与轴向刚度的比值为目标函数,对狭缝柔性结构尺寸参数进行了优化,在不超过柔性结构材料屈服应力等约束条件下,刚度比最优值达到1 573.6,较大的刚度比值可以减小调节机构的耦合位移,从而提高机构的导向精度。该结构加工装配方便,可实现三自由度(θx-θy-Z)调节。对优化后的柔性结构进行仿真分析,结果表明:径向刚度与轴向刚度比值的仿真值为1 660.4,解析值与仿真值误差为5.23%,证明了刚度分析方法的有效性。优化后的结构,轴向调节行程为2.09 mm,绕x轴偏转角度调节行程为±16.6 mrad,绕y轴偏转角度调节行程可达到±14.4 mrad,满足光学元件调节的大行程要求。Abstract: An adjustment mechanism with slit diaphragm flexures is designed to keep the optical elements with higher guide precision while maintaining higher accuracy of adjustment. The stiffness of the slit diaphragm flexures structure is analyzed using the elastic mechanics stress function method. The ratio of the radial stiffness to the axial rigidity is taken as the objective function to optimize the dimension parameters of the slit diaphragm flexures structure. Under the condition of not exceeding the yield stress of the flexible structure material, the optimal value of the stiffness ratio reaches 1 573.6. A larger stiffness ratio can reduce the coupling displacement of the adjustment mechanism, so as to improve the guide accuracy of the mechanism. This mechanism is easily fabricated and assembled, and allows adjustment of three degree of freedom (θx-θy-Z). The stiffness of the slit diaphragm flexure is simulated and analyzed. The results show that the ratio of radial stiffness to axial stiffness is 1 660.4, and the error between analytical value and simulation value is 5.23%, which proves the validity of the stiffness analysis method. The optimized structure has an axial adjustment stroke of 2.09 mm, an adjustment stroke of ±16.6 mrad about the x-axis deflection angle and a ±14.4 mrad deflection angle about the y-axis, which satisfies the large stroke adjustment requirement of the optical element.
-

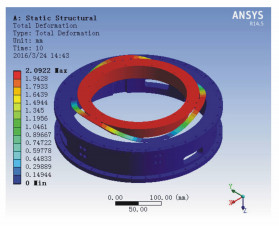
图 8 狭缝柔性结构绕X轴偏转调节变形云图
Figure 8. Angle deformation of the slit diaphragm flexures around on X axis

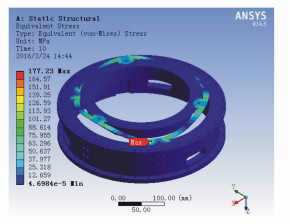
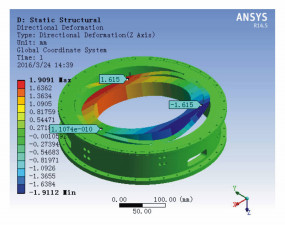
图 9 狭缝柔性结构绕Y轴偏转调节变形云图
Figure 9. Angle deformation of the slit diaphragm flexures around on Y axis
表 1 最优化参数值
Table 1. Value of optimized parameters
b/mm h/mm d/mm rf/mm α/(°) maxf(X) 13 1.25 1 139.5 16 1 573.6  下载: 导出CSV
下载: 导出CSV
表 2 狭缝柔性结构性能参数解析值与仿真值比照
Table 2. Comparison between performance parameters of the slit diaphragm flexures and simulation valves
The axial stiffness/(N·mm-1) The radial stiffness/(N·mm-1) The stiffness ratio The theoretical value 14.61 2 2996 1 573.6 The simulation value 14.34 23 809 1 660.4 The relative tolerance(%) 1.92 3.41 5.23
下载: 导出CSV
-
[1] MATSUYAMA T, OHMURA Y, WILLIAMSON D M. The lithographic lens:its history and evolution[C]. SPIE 31st International Symposium on Advanced Lithography(ISAL), San Jose, CA, USA, 2006, 6154:615403-615414. [2] MIURA T, MURAKAMI K, SUZUKI K, et al.. Nikon EUVL development progress summary[C]. SPIE 31st International Symposium on Advanced Lithography(ISAL), San Jose, CA, USA, 2006, 6151:615105-615110. [3] 倪明阳, 巩岩.光刻投影物镜光学元件运动学支撑结构的设计与分析[J].中国光学, 2012, 5(5):476-484. http://www.chineseoptics.net.cn/CN/abstract/abstract8880.shtmlNI M Y, GONG Y. Design and analysis of kinematic lens positioning structure in lithographic projection objective[J]. Chiense Optics, 2012, 5(5):476-484.(in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract8880.shtml [4] 朱华征, 范大鹏, 张智永, 等.精密光路偏转及焦距调整机构的发展[J].激光与红外, 2009, 10:1028-1033. http://www.cqvip.com/QK/92524X/200910/31861310.htmlZHU H ZH, FAN D P, ZHANG ZH Y, et al.. Development of precise light beam steering and focusing equipments[J]. Laser & Infrared, 2009, 10:004.(in Chinese) http://www.cqvip.com/QK/92524X/200910/31861310.html [5] 赵磊, 巩岩, 赵阳.光刻投影物镜中的透镜X-Y柔性微动调整机构[J].光学 精密工程, 2013, 21(6):1425-1433. http://kns.cnki.net/KCMS/detail/detail.aspx?filename=gxjm201306009&dbname=CJFD&dbcode=CJFQZHAO L, GONG Y, ZHAO Y.Flexure-based X-Y micro-motion mechanism used in lithographic lens[J]. Opt. Precision Eng, 2013, 21(6):1425-1433.(in Chinese) http://kns.cnki.net/KCMS/detail/detail.aspx?filename=gxjm201306009&dbname=CJFD&dbcode=CJFQ [6] 荆丹. 基于压电陶瓷的超精密柔性微定位机构的研究[D]. 大连: 大连理工大学, 2007. http://d.wanfangdata.com.cn/Thesis_Y1093337.aspxJING D. Research on ultra precision flexible micro-displacement mechanism of piezoelectric actuator[D]. Dalian:Dalian University of Technology, 2007.(in Chinese) http://d.wanfangdata.com.cn/Thesis_Y1093337.aspx [7] 于靖军, 郝广波, 陈贵敏, 等.柔性机构及其应用研究进展[J].机械工程学报, 2015, 13:53-68. http://kns.cnki.net/KCMS/detail/detail.aspx?filename=jxxb201513006&dbname=CJFD&dbcode=CJFQYU J J, H G B, CHEN G M, et al.. State-of-art of compliant mechanisms and their applications[J]. J. Mechanical Engineering, 2015, 13:53-68.(in Chinese) http://kns.cnki.net/KCMS/detail/detail.aspx?filename=jxxb201513006&dbname=CJFD&dbcode=CJFQ [8] 刘磊, 曹国华.大视场长焦面光学遥感器双凸轮式焦面调焦机构[J].光学 精密工程, 2012, 20(9):1939-1944. http://kns.cnki.net/KCMS/detail/detail.aspx?filename=gxjm201209008&dbname=CJFD&dbcode=CJFQLIU L, CAO G H. Double cam focusing mechanism of space camera with wide field and long-focal-plane[J]. Opt. Precision Eng., 2012, 20(9):1939-1944.(in Chinese) http://kns.cnki.net/KCMS/detail/detail.aspx?filename=gxjm201209008&dbname=CJFD&dbcode=CJFQ [9] 张新洁, 颜昌翔, 谢涛.星载光学遥感器调焦机构的设计[J].光学 精密工程, 2009, 17(11):2757-2761. http://kns.cnki.net/KCMS/detail/detail.aspx?filename=gxjm200911023&dbname=CJFD&dbcode=CJFQZHANG X J, YAN CHANG X, XIE T.Design of focusing mechanism of space remote sensor[J]. Opt. Precision Eng., 2009, 17(11):2757-2761.(in Chinese) http://kns.cnki.net/KCMS/detail/detail.aspx?filename=gxjm200911023&dbname=CJFD&dbcode=CJFQ [10] HALE L C. Principles and techniques for designing precision machines[D]. Massachusetts:Massachusetts Institute of Technology, Dept. of Mechanical Engineering, 1999. https://www.mendeley.com/research-papers/principles-techniques-designing-precision-machines/ [11] TAJBAKHSH H, HALE L M, JENSEN S, et al.. Three-degree-of-freedom optic mount for extreme ultraviolet lithography[C]. The 13th Annual meeting of American Society for Precision Engineering, St. Louis, USA, 1998:359-362. [12] CHEN S C, GOLDA D, HERRMANN A, et al.. Design of an ultra precision diaphragm flexure stage for out-of-plane motion guidance[C]. ASME 2004 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Salt Lake City, Utah, USA, 2004:1015-1021. [13] COX B, KAUFMAN M. Design considerations of a slit diaphragm flexure used in a precision mirror gimbal[J]. Proceedings of SPIE, 2011, 8125:81250R-11. doi: 10.1117/12.890913 [14] VUKOBRATOVICH D, RICHARD R M, MCNIVEN J P, et al.. Slit diaphragm flexures for optomechanics[C]. SPIE's 1995 International Symposium on Optical Science, Engineering, and Instrumentation, San Diego, CA, USA, 1995:2-10. [15] 彭海峰, 孙振.光刻物镜中光学元件精密轴向调整机构的设计与分析[J].光子学报, 2014, 4:113-117. http://kns.cnki.net/KCMS/detail/detail.aspx?filename=gzxb201404020&dbname=CJFD&dbcode=CJFQPENG H F, SUN ZH. Design and analysis of a precision axial adjusting mechanism for optical elements in lithographic lens[J]. Acta Photonica Sinica, 2014, 4:113-117.(in Chinese) http://kns.cnki.net/KCMS/detail/detail.aspx?filename=gzxb201404020&dbname=CJFD&dbcode=CJFQ [16] 郭抗, 巩岩.6-PSS型光学元件精密轴向调节机构[J].光学 精密工程, 2013, 21(10):2648-2655. http://kns.cnki.net/KCMS/detail/detail.aspx?filename=gxjm201310024&dbname=CJFD&dbcode=CJFQGUO K, GONG Y. Precise axial adjustment mechanism with 6-PSS type of optical elements[J]. Opt. Precision Eng., 2013, 21(10):2648-2655.(in Chinese) http://kns.cnki.net/KCMS/detail/detail.aspx?filename=gxjm201310024&dbname=CJFD&dbcode=CJFQ -

 下载:
下载:





图(9) / 表(2)
计量
- 文章访问数: 3552
- HTML全文浏览量: 1571
- PDF下载量: 584
- 被引次数: 0
