


-
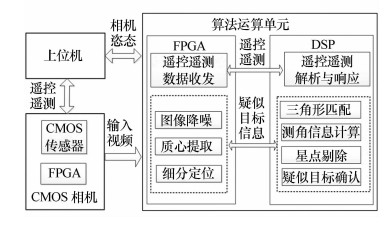
摘要: 本文面向空间点目标探测,设计了基于高灵敏度CMOS传感器的空间点目标探测系统。首先对CMOS传感器图像进行降噪,提高传感器的探测灵敏度;其次,采用DSP+FPGA嵌入式架构,设计了基于星图匹配信息构建的点目标探测算法,并详细介绍了算法原理和步骤。最后,采用电子星图模拟器对该探测系统进行测试。结果表明:该嵌入式系统具备1 024×1 024@20p格式视频的实时处理能力,可以探测6等星。当信噪比大于6,视轴指向误差小于1°时,对于不同运动速度、不同尺寸点目标均能准确探测,识别正确率接近100%。综合而言,该空间点目标探测方法的计算精度高、适应性强、可靠性高,能够应用于空间点目标的有效探测。Abstract: In this paper, a space point target detection system is designed based on highly sensitive CMOS sensor. Firstly, noise reduction of CMOS sensor image is carried out to improve the sensitivity of the detection sensor; secondly, by using DSP+FPGA embedded architecture, a point target detection algorithm based on star map matching is designed and the principle and steps of the algorithm are introduced in detail. Finally, the electronic star map simulator is used to test the detection system. The results show that the embedded system can process 1 024×1 024@20p format videos in real-time, and the sixth-magnitude stars can be detected. When the SNR is greater than 6 and the pointing error is less than 1°, targets which with different speed and size can be detected with a detection accuracy of nearly 100%. In summary, the space point target detection method has high computational precision, strong adaptability and high reliability, and can be effectively applied to the space point target detection.
-
Key words:
- CMOS sensor /
- point target detection /
- star map matching /
- embedded system
-

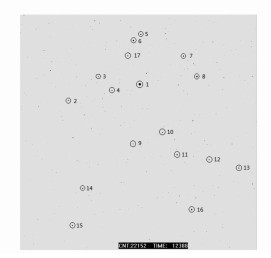
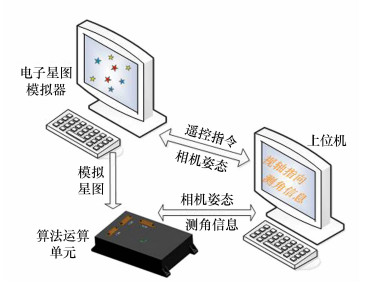
图 6 基于电子星图模拟器仿真验证最小系统
Figure 6. Minimum simulation system based on electronic stellar map simulator
表 1 星点详细信息
Table 1. Details of the stars point
HIP编号 HD编号 V星等 高度角/(°) 光谱型 是否提取 HIP89482 167965 5.56 79 B7IV 是 HIP89604 168322 6.12 85 G8.5IIIbFe-1CH0.5 是 HIP89962 168723 3.23 46 K0III-IV 是 HIP91262 172167 0.03 87.5 A0Va 是 HIP92862 175865 4.08 79.5 M5III 是 HIP93408 177196 5 77 A7V 是 HIP93747 177724 2.99 61.5 A0Vn 是 HIP94481 180163 4.43 75 B2.5IV 是 HIP95501 182640 3.36 49 F3IV 是 HIP95947 183912 3.05 70 K3II+B9.5V 是 HIP95853 184006 3.76 71 A5Vn 是 HIP95853 184006 3.75 77 A5Vn 是 HIP96441 185395 4.45 77 F4V 是 HIP99655 192696 4.25 70 A3IV-Vn 是 HIP99951 192944 5.3 71.5 G8III 是 HIP100453 194093 2.23 67 F8Ib 是 HIP100453 194093 2.2 86 F8Ib 是  下载: 导出CSV
下载: 导出CSV
-
[1] 李少敏, 牛威, 马鑫, 等.空间目标探测技术研究[J].国防科技, 2009(3):6-13. http://kns.cnki.net/KCMS/detail/detail.aspx?filename=gfck200903004&dbname=CJFD&dbcode=CJFQLI SH M, NIU W, MA X, et al.. Research on space target exploration technology[J]. National Defense Science & Technology, 2009(3):6-13.(in Chinese) http://kns.cnki.net/KCMS/detail/detail.aspx?filename=gfck200903004&dbname=CJFD&dbcode=CJFQ [2] 王维, 董吉洪, 孟庆宇.火星探测可见光遥感相机的发展现状与趋势[J].中国光学, 2014, 7(2):208-214. http://www.chineseoptics.net.cn/CN/abstract/abstract9119.shtmlWANG W, DONG J H, MENG Q Y. Current status and developing tendency of visible spectral remote sensing camera for mars observation[J]. Chinese Optics, 2014, 7(2):208-214.(in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract9119.shtml [3] BULAYEV Y. Advances in CMOS image sensors open doors to many applications[J]. Photonics Spectra, 2015, 49(9):41-43. https://www.researchgate.net/publication/3941826_Single-chip_CMOS_image_sensor_for_mobile_applications [4] 梁斌, 朱海龙, 张涛, 等.星敏感器技术研究现状及发展趋势[J].中国光学, 2016, 9(1):16-29. http://www.chineseoptics.net.cn/CN/abstract/abstract9384.shtmlLIANG B, ZHU H L, ZHANG T, et al.. Research status and development tendency of star tracker technique[J]. Chinese Optics, 2016, 9(1):16-29.(in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract9384.shtml [5] 杨涛, 吴孙桃, 郭东辉.CMOS图像传感器电路噪声分析[J].厦门大学学报(自然版), 2012, 51(3):321-326. https://www.wenkuxiazai.com/doc/d4219012f01dc281e43af039-2.htmlYANG T, WU S T, GUO D H. Analysis of noise behavior in CMOS image sensor[J]. Journal of Xiamen University, 2012, 51(3):321-326.(in Chinese) https://www.wenkuxiazai.com/doc/d4219012f01dc281e43af039-2.html [6] KIM D, BAE J, SONG M. A high speed CMOS image sensor with a novel digital correlated double sampling and a differential difference amplifier[J]. Sensors, 2015, 15(3):5081-5095. https://www.researchgate.net/profile/Daehyeok_Kim2/publication/273150376_A_High_Speed_CMOS_Image_Sensor_with_a_Novel_Digital_Correlated_Double_Sampling_and_a_Differential_Difference_Amplifier/links/56e1627a08aec09a8bbec050.pdf?origin=publication_detail [7] 王华, 曹剑中, 王华伟, 等.基于估计方法的CMOS图像传感器列固定模式噪声校正方法[J].红外与激光工程, 2013, 42(7):1928-1932. http://kns.cnki.net/KCMS/detail/detail.aspx?filename=hwyj201307050&dbname=CJFD&dbcode=CJFQWANG H, CAO J ZH, WANG H W, et al.. Column fixed pattern noise correction of the CMOS image sensor based on estimation method[J]. Infrared & Laser Engineering, 2013, 42(7):1928-1932.(in Chinese) http://kns.cnki.net/KCMS/detail/detail.aspx?filename=hwyj201307050&dbname=CJFD&dbcode=CJFQ [8] SAFFIH F, HORNSEY R. Reduced human perception of FPN noise of the pyramidal readout CMOS image sensor[J]. IEEE Transactions on Circuits & Systems for Video Technology, 2007, 17(7):924-930. https://www.researchgate.net/profile/Faycal_Saffih/publication/3309134_Reduced_Human_Perception_of_FPN_Noise_of_the_Pyramidal_Readout_CMOS_Image_Sensor/links/00b7d53514c49afb8a000000.pdf?inViewer=true&pdfJsDownload=true&disableCoverPage=true&origin=publication_detail [9] 魏新国, 张广军, 江洁.星敏感器中星图图像的星体细分定位方法研究[J].北京航空航天大学学报, 2003, 29(9):812-815. http://kns.cnki.net/KCMS/detail/detail.aspx?filename=bjhk200309014&dbname=CJFD&dbcode=CJFQWEI X G, ZHANG G J, JIANG J. Subdivided locating method of star image for star sensor[J]. Journal of Beijing University of Aeronautics & Astronautics, 2003, 29(9):812-815.(in Chinese) http://kns.cnki.net/KCMS/detail/detail.aspx?filename=bjhk200309014&dbname=CJFD&dbcode=CJFQ [10] 连月勇, 张超, 谢宗特.星点亚像元细分定位精度分析[J].测绘科学技术学报, 2015, 32(6):578-582. http://www.cnki.com.cn/Article/CJFDTOTAL-GXJS200505006.htmLIAN Y Y, ZHANG CH, XIE Z T. Accuracy analysis for sub-pixel location of star image[J]. Journal of Geomatics Science & Technology, 2015, 32(6):578-582.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-GXJS200505006.htm [11] 李振伟, 张涛, 孙明国.星空背景下空间目标的快速识别与精密定位[J].光学精密工程, 2015, 23(2):589-599. http://www.cqvip.com/QK/92835A/201502/663914585.htmlLI ZH W, ZHANG T, SUN M G. Fast recognition and precise orientation of space objects in star background[J]. Opt. Precision Eng., 2015, 23(2):589-599.(in Chinese) http://www.cqvip.com/QK/92835A/201502/663914585.html [12] 李欣璐, 杨进华, 张刘, 等.用于快速星跟踪的双向递推匹配识别[J].光学精密工程, 2015, 23(5):1443-1449. http://kns.cnki.net/KCMS/detail/detail.aspx?filename=gxjm201505031&dbname=CJFD&dbcode=CJFQLI X L, YANG J H, ZHANG L, et al.. Bidirectional selective rule out matching recognition of fast star tracking[J]. Opt. Precision Eng., 2015, 23(5):1443-1449.(in Chinese) http://kns.cnki.net/KCMS/detail/detail.aspx?filename=gxjm201505031&dbname=CJFD&dbcode=CJFQ [13] 翟优, 曾峦, 熊伟.基于不变特征描述符实现星点匹配[J].光学精密工程, 2012, 20(11):2531-2539. https://www.wenkuxiazai.com/doc/7cf4ea7727284b73f24250e2-2.htmlZHAI Y, ZENG L, XIONG W. Star matching based on invariant feature descriptor[J]. Opt. Precision Eng., 2012, 20(11):2531-2539.(in Chinese) https://www.wenkuxiazai.com/doc/7cf4ea7727284b73f24250e2-2.html [14] 刘太阳, 王仕成, 刘志国, 等.基于星三角形角度的竞选式星图识别[J].光电工程, 2011, 38(3):29-34. https://www.wenkuxiazai.com/doc/a17750ed81c758f5f61f67ac.htmlLIU T Y, WANG S CH, LIU ZH G, et al.. Voting star recognition algorithm with main star triangle angular determination[J]. Opto-Electronic Engineering, 2011, 38(3):29-34.(in Chinese) https://www.wenkuxiazai.com/doc/a17750ed81c758f5f61f67ac.html [15] SCHIATTARELLA V, SPILLER D, CURTI F. A novel star identification technique robust to high presence of false objects:the multi-poles algorithm[J]. Advances in Space Research, 2017, 59(8):2133-2147. doi: 10.1016/j.asr.2017.01.034 [16] 江山, 张锐, 韩广良, 等.复杂背景灰度图像下的多特征融合运动目标跟踪[J].中国光学, 2016, 9(3):320-328. http://www.chineseoptics.net.cn/CN/abstract/abstract9410.shtmlJIANG SH, ZHANG R, HAN G L, et al.. Moving object tracking based on multi-feature fusion in the complex background gray image[J]. Chinese Optics, 2016, 9(3):320-328.(in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract9410.shtml -

 下载:
下载:

图(7) / 表(1)
计量
- 文章访问数: 2253
- HTML全文浏览量: 573
- PDF下载量: 517
- 被引次数: 0
