


-
摘要: 为实现高速相机的分幅功能,本文提出一种采用多角度耦合分幅方式的高速相机光学系统。该系统分幅结构采用多组相同的光学系统,在平行于物面的圆周上均匀分布,分别从不同角度拍摄同一物面,在保证各组系统的物方视场相同的情况下,每组光学系统的光轴与物平面的夹角均相同,通过优化设计得到全视场的最佳成像。根据需求,使用光学设计软件设计了多角度耦合四分幅成像中长焦光学系统并绘制三维立体仿真模型,分析了每组像面像质、照度以及畸变等相关参数,调制传递函数MTF在频率为50 lp/mm处不低于0.5,F数为2,畸变小于0.4%,相较于常用的棱镜和反射棱锥分光方式,无需额外分光结构,像面照度提高4倍以上。结果表明成像质量理想,分幅相机系统各像面所成像一致性高。Abstract: In order to realize the framing function of high-speed cameras, we proposes a high-speed camera optical system using multi-angle coupled framing methods. The framing structure uses multiple groups of the same optical system and is evenly distributed on the circumference parallel to the object plane. The same object surface is photographed from different angles. Each group is guaranteed to have the same object field of view. The angle between the optical axis of the optical system and the object plane is the same, and the best imaging of the entire field of view is obtained through optimization design. According to the requirements, a telephoto optical system in multi-angle-coupled quadrant imaging is designed using optical design software and a three-dimensional simulation model is drawn. The image quality, luminance, distortion, and other relevant parameters of each group are analyzed, and at a frequency of 50lp/mm, the modulation transfer function(MTF) is not less than 0.5, the F number is 2, and the distortion is less than 0.4%. Compared with the commonly used prism and reflective pyramidal spectroscopy, the surface illumination can be increased by more than 4 times without additional splitting structure. The results show that the imaging quality is ideal and the image formation consistency of the image planes of the framing camera system is satisfied.
-
Key words:
- optical design /
- framing camera /
- high-speed photography
-

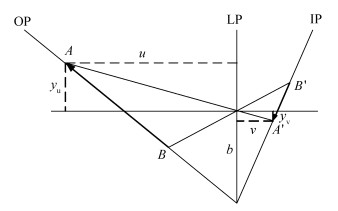
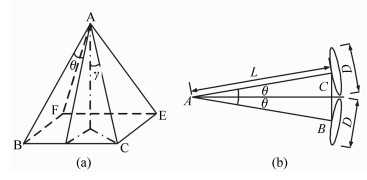
图 1 (a) 物点与4个系统的立体结构;(b)相邻两个系统的几何关系
Figure 1. (a)Structure of the object point and four systems; (b)geometrical relationship of two adjacent systems

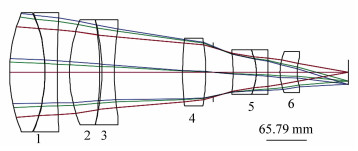
图 3 单组物镜二维轮廓图
1.双胶合透镜一, 2.凸透镜一, 3.凹透镜, 4.凸透镜二, 5.双胶合透镜二, 6.弯月透镜
Figure 3. 2D layout graph of single group of objective
1.double glude lens, 2.convex len, 3.concave len, 4.convex len, 5.double lude lens, 6.meniscus len

图 8 (a)、(b)、(c)和(d)分别为结构1、2、3和4的畸变网格图
Figure 8. (a), (b), (c) and (d) are the distortion grid figures of configuration 1, 2, 3 and 4 respectively
表 1 各个分幅像面在不同视场的最小相对照度
Table 1. The minimum relative illuminance of each segmented image surface in differend fields of view
结构 扫描方向 +X -X +Y -Y 1 0.973 0.973 0.970 0.976 2 0.973 0.973 0.976 0.970 3 0.976 0.970 0.973 0.973 4 0.970 0.976 0.973 0.973  下载: 导出CSV
下载: 导出CSV
-
[1] 谭显祥.光学高速摄影测试技术[M].北京:科学出版社, 1990.TAN X X. Test Technique for Optical High Speed Photograph[M]. Beijing:Science Press, 1990.(in Chinese) [2] 谭显祥.高速摄影技术[M].北京:原子能出版社, 1990.TAN X X. Technique for High Speed Photograph[M]. Beijing:Atomic Energy Press, 1990.(in Chinese) [3] 蔡厚智, 龙井华, 刘进元, 等.无增益微通道板皮秒分幅技术研究[J].红外与激光工程, 2015, 44(S):109-112. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=hwyjggc2015z1020CAI H ZH, LONG J H, LIU J Y, et al.. Non-gain microchannel plate picosecond framing technology[J]. Infrared and Laser Engineering, 2015, 44(S):109-112.(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=hwyjggc2015z1020 [4] 张承忠, 叶邦彥, 赵学智, 等.用于提琴琴弦三维振动测量的高速摄影系统[J].光学 精密工程, 2014, 22(9):2329-2336. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gxjmgc201409007ZHANG CH ZH, YE B Y, ZHAO X ZH, et al.. High-speed photographic system for 3D vibration measurement of violin string[J]. Opt. Precision Eng., 2014, 22(9):2329-2336.(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gxjmgc201409007 [5] 白晓红, 白永林, 刘百玉, 等.神光原型诊断设备:门控针孔分幅相机的研制[J].光学 精密工程, 2011, 19(2):367-373. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gxjmgc201102021BAI X H, BAI Y L, LIU B Y, et al.. SG diagnostic equipment:Gating pinhole framing camera[J]. Opt. Precision Eng., 2011, 19(2):367-373.(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gxjmgc201102021 [6] 李先朱.间歇式高速摄影机的分辨率[J].光子学报, 1997, 26(12):1130-1134. http://mall.cnki.net/magazine/Article/GZXB198703291.htmLI X ZH. Resolution of the intermittent high speed camera[J]. Acta Photonica Sinica, 1997, 26(12):1130-1134.(in Chinese) http://mall.cnki.net/magazine/Article/GZXB198703291.htm [7] 阎兴隆, 李景镇.全息相干快门超高速摄影初步研究[J].高速摄影与光子学, 1990, 19(3):264-269. http://www.cqvip.com/QK/93651X/199003/248906.htmlYAN X L, LI J ZH. Primary study of ultra-high-speed photography with holographic coherence shutters[J]. High Speed Photography and Photonics, 1990, 19(3):264-269.(in Chinese) http://www.cqvip.com/QK/93651X/199003/248906.html [8] 谢洪波, 徐萌萌, 龚艳霞, 等.宽光谱超高速八分幅相机的光学系统设计[J].应用光学, 2016, 37(2):172-176. https://www.wenkuxiazai.com/doc/f087eac043323968001c9266.htmlXIE H B, XU M M, GONG Y X, et al.. Optical system design of wide-spectrum and ultra high-speed 8-frame framing camera[J]. Journal of Applied Optics, 2016, 37(2):172-176.(in Chinese) https://www.wenkuxiazai.com/doc/f087eac043323968001c9266.html [9] 李剑, 刘宁文, 肖正飞, 等.可用于多幅纹影照相的超高速光电分幅相机光学系统设计[J].光电工程, 2014, 41(10):38-41. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gdgc201410007LI J, LIU N W, XIAO ZH F, et al.. Optical system design of ultra high speed optic electronic framing camera used in shlieren experiment[J]. Opto-Electronic Engineering, 2014, 41(10):38-41.(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gdgc201410007 [10] 刘宁文, 李剑, 赵新才, 等.超高速光电分幅相机及应用[J].高压物理学报, 2016, 30(1):37-41. http://www.cqvip.com/QK/96553X/201601/667688719.htmlLIU N W, LI J, ZHAO X C, et al.. An ultra-high-speed electro-optical framing camera and its application[J]. Chinese Journal of High Pressure Physics, 2016, 30(1):37-41.(in Chinese) http://www.cqvip.com/QK/96553X/201601/667688719.html [11] 江孝国, 王远, 金光, 等.超高速高性能门控型三分幅相机[J].光子学报, 2013, 42(9):1065-1070. http://www.opticsjournal.net/abstract.htm?id=OJ130917000258z7C0FbJIANG X G, WANG Y, JIN G, et al.. Three-frame framing camera with ultrahigh speed and high performance[J]. Acta Photonica Sinica, 2013, 42(9):1065-1070.(in Chinese) http://www.opticsjournal.net/abstract.htm?id=OJ130917000258z7C0Fb [12] 单宝忠, 郭宝平, 牛憨笨.多通道门选通纳秒分幅相机[J].光学 精密工程, 2007, 15(12):1963-1968. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gxjmgc200712022SHAN B ZH, GUO B P, NIU H B. Multi-channel nano-second framing camera with gate selection[J]. Opt. Precision Eng., 2007, 15(12):1963-1968.(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gxjmgc200712022 [13] 谢洪波, 祝世民, 龚艳霞, 等.应用于数字高速成像的离轴光学系统设计[J].应用光学, 2015, 36(2):194-198. http://www.opticsjournal.net/abstract.htm?id=OJ130917000258z7C0FbXIE H B, ZHU SH M, GONG Y X, et al.. Design of off-axis optical system applied for digital high-speed imaging[J]. Journal of Applied Optics, 2015, 36(2):194-198.(in Chinese) http://www.opticsjournal.net/abstract.htm?id=OJ130917000258z7C0Fb [14] Proof of the Scheimpflug principle[EB/OL]. https://en.wikipedia.org/wiki/Scheimpflug_principle, 2015. [15] 李晓彤, 岑兆丰.几何光学·像差·光学设计[M].杭州:浙江大学出版社, 2014.(in Chinese)LI X T, CEN ZH F. Geometrical Optics Aberrations and Optical Design[M]. Hangzhou:Zhejiang University Press, 2014.(in Chinese) -

 下载:
下载:




计量
- 文章访问数: 2162
- HTML全文浏览量: 540
- PDF下载量: 325
- 被引次数: 0
