


Coarse tracking technology of secondary imaging Coude-type laser communication terminal
-
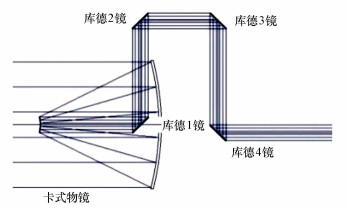
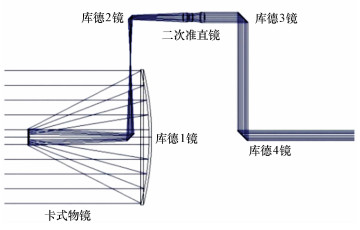
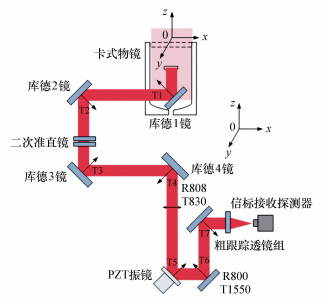
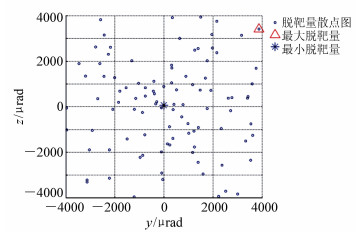
摘要: 库德式激光通信终端粗跟踪探测器大视场接收信标光时,需通过望远单元、多块库德反射镜、分光片和粗跟踪透镜组,信标光传输路径长,使得后续子光路粗跟踪支路口径明显增加;捕获时望远单元和库德反射镜与粗跟踪探测器存在相对运动,信标光传递环节多,跟踪模型复杂。针对这两个问题,首先,对比了3种传统库德光路,选择二次成像型库德光路并对其进行设计,通过设计使后续子光路光学口径减小,利于后续子光路轻小型化设计;随后,对二次成像型库德式激光通信终端的跟踪模型进行推导,通过反射镜矩阵和坐标变换建立跟踪模型,并用Matlab-Simulink对跟踪模型进行仿真;最后,通过地面试验,对终端的跟踪性能进行测试,实测方位跟踪最大脱靶量为84.65 μrad(3σ)、俯仰最大脱靶量为56.33 μrad(3σ),满足通信要求的150 μrad(3σ),二次成像型库德结构和跟踪模型可满足星间激光通信粗跟踪捕获和跟踪要求。Abstract: When the Coude-type laser communication terminal coarse tracking detector receives the beacon light in a large field of view, it needs to pass through the telephoto unit, a plurality of Coude mirrors, a beam splitter, and a thick tracking lens group, so the long beacon light transmission path results in a significant increase in the optical aperture of following sub-optical path coarse tracking branch. At the time of capture, telescopic units and Coude mirrors have relative motion with the coarse tracking detectors, there are many beacon light transmission links and the tracking model is complex. To solve these two problems, first, three kinds of traditional Coude light paths are compared, the secondary imaging Coude optical path is selected and designed to reduce the optical aperture of the subsequent sub-optical path, which is conducive to the subsequent light and miniaturization design of the sub-beam path. Subsequently, the tracking model of the secondary imaging Coude-type laser communication terminal is deduced, the tracking model is established by the mirror matrix and coordinate transformation, and the tracking model is simulated by Matlab-Simulink; finally, through the ground test, the tracking performance of the terminal is evaluated. The maximum target miss distance of azimuth tracking is 84.65 μrad(3σ), and the maximum target miss distance of pitch tracking is 56.33 μrad(3σ), which satisfies the communication requirements of 150 μrad(3σ). The secondary imaging Coude-type structure and tracking model meet the requirements of coarse tracking acquisition and tracking of inter-satellite laser communication.
-

图 5 库德光路粗跟踪中心视场和边缘视场波前误差
Figure 5. Wavefront error of Coude optical system of the field of view in the rough tracking center and edge

图 6 库德光路的组成及坐标系
Figure 6. Composition of the Coude optical system and coordinate system

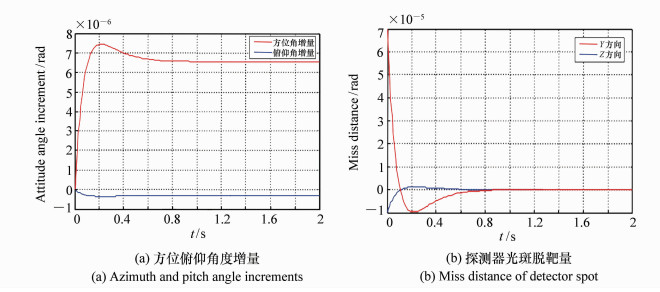
图 9 中心视场附近角度增量和光斑脱靶量
Figure 9. Angle increment and spot miss distance near the center of view

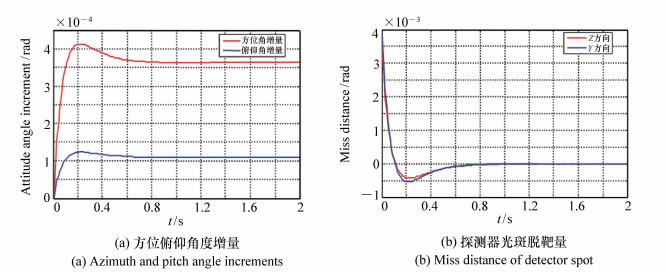
图 10 边缘视场附近角度增量和光斑脱靶量
Figure 10. Angle increment and spot miss distance near the edge of the field of view
表 1 主天线参数
Table 1. Main antenna parameters
项目 参数 口径/mm 250 物镜焦距/mm 2 707.8 目镜焦距/mm 205.7 放大倍数 12.5 视场/mrad 4 光学天线整机包络/mm Φ300×400 库德1镜到库德2镜距离/mm 215.5 库德2镜到3镜距离/mm 107 库德3镜到库德4镜距离/mm 65.72  下载: 导出CSV
下载: 导出CSV
-
[1] 付强, 姜会林, 王晓曼, 等.空间激光通信研究现状及发展趋势[J].中国光学, 2012, 5(2):117-122. http://www.chineseoptics.net.cn/CN/abstract/abstract8803.shtmlFU Q, JIANG H L, WANG X M, et al.. Research status and development trend of space laser communication[J]. Chinese Optics, 2012, 5(2):117-122.(in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract8803.shtml [2] 王玲, 陈曦, 董峰.空间激光通信光端机发展水平与发展趋势[J].长春理工大学学报(自然科学版), 2016, 39(2):39-45. http://www.bigengculture.com/kejilunwen/xinxigongchenglunwen/458314.htmlWANG L, CHEN X, DONG F. Development level and trend for space laser communication optical transceiver[J]. Journal of Changchun University of Science and Technology(Natural Science Edition), 2016, 39(2):39-45.(in Chinese) http://www.bigengculture.com/kejilunwen/xinxigongchenglunwen/458314.html [3] 姜会林, 安岩, 张雅琳, 等.空间激光通信现状、发展趋势及关键技术分析[J].飞行器测控学报, 2015, 34(3):207-217. http://www.wanfangdata.com.cn/details/detail.do?_type=conference&id=7686562JANG H L, AN YAN, ZHANG Y L, et al.. Analysis of the status, development trend and key technologies of space laser communication[J]. Journal of Spacecraft TT & C Technology, 2015, 34(3):207-217.(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=conference&id=7686562 [4] SZ KELY G, et al. . A coarse pointing assembly for optical communication[C]. Zürich, Switzerland: Proceedings of the 40th Aerospace Mechanisms Symposium, NASA Kennedy Space Center, USA, 2010: 99-105 [5] LEWIS S D, MUNRO G, HUMPHRIES M E, et al. . Development of an adjustable bearing preload enabled-optical terminal[C] 13th European Space Mechanisms and Tribology Symposium-ESMATS, Vienna, Austria, 2009: 1-5. [6] MUSSETT D, HUMPHRIES M E, HENZELIN F, et al. Contraves optical terminal-coarse pointing assembly(CPA)[C]. 10th European Space Mechanisms and Tribology Symposum, Schaffhauserstr, Switzerland, 2010: 99-108. [7] BERNARD L EDWARDS, BRYAN ROBINSON, ABHIJIT BISWAS, et al. . An overview of NASA's latest efforts in optical communications[C]. IEEE International Conference on Space Optical Systems and Applications, IEEE, 2015: 1-8. [8] 董登峰, 周维虎, 纪荣祎, 等.激光跟踪仪精密跟踪系统的设计[J].光学 精密工程, 2016, 24(2):309-318. http://www.bigengculture.com/kejilunwen/yiqiyibiao/1110432.htmlDONG D F, ZHOU W H, JI R W, et al.. B.Laser tracker precision tracking system design[J]. Opt. Precision Eng., 2016, 24(2):309-318.(in Chinese) http://www.bigengculture.com/kejilunwen/yiqiyibiao/1110432.html [9] 鄢永耀. 空间激光通信光学天线及粗跟踪技术研究[D]. 长春: 长春光学精密机械与物理研究所, 2017: 37-40. https://mall.cnki.net/lunwen-1016082645.nh.htmlYAN Y Y. Research on optical antenna and coarse tracking technology of space laser communication[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Science, 2017: 37-40. (in Chinese) https://mall.cnki.net/lunwen-1016082645.nh.html [10] 吕佳飞, 张立中, 张家齐.微小卫星激光通信粗跟踪机构设计与分析[J].长春理工大学学报(自然科学版), 2017, 40(1):94-97. https://wenku.baidu.com/view/e1f68713905f804d2b160b4e767f5acfa1c78321.htmlLV J F, ZHANG L ZH, ZHANG J Q. Design and analysis of coarse tracking assembly for micro-satellite laser communication[J]. Journal of Changchun University of Science and Technology(Natural Science Edition), 2017, 40(1):94-97.(in Chinese) https://wenku.baidu.com/view/e1f68713905f804d2b160b4e767f5acfa1c78321.html [11] 明名, 吕天宇, 吕小霞.二次成型式Coude光学系统的设计、检测与装调[J].光子学报, 2014, 43(6):175-180. http://www.cnki.com.cn/Article/CJFDTotal-GZXB201408013.htmMING M, LV T Y, LV X X. Design, measurement and alignment of a coude optical system with reimaging[J]. Acta Photonica Sinica, 2014, 43(6):175-180.(in Chinese) http://www.cnki.com.cn/Article/CJFDTotal-GZXB201408013.htm [12] 谭立英, 吴世臣, 韩琦琦, 等.潜望镜式卫星光通信终端的CCD粗跟踪[J].光学 精密工程, 2012, 20(2):271-276. https://wuxizazhi.cnki.net/lunwen-1013036082.htmlTAN L Y, WU SH CH, HAN Q Q, et al.. Coarse tracking of periscope-type satellite optical communication terminals[J]. Opt. Preceision Eng., 2012, 20(2):271-276.(in Chinese) https://wuxizazhi.cnki.net/lunwen-1013036082.html [13] 刘洋, 宋延嵩, 佟首峰, 等.卫星光通信系统振动源的模拟设计[J].光学学报, 2016, 36(12):74-80. http://www.bigengculture.com/kejilunwen/xinxigongchenglunwen/418893.htmlLIU Y, SONG Y S, TONG SH F, et al.. Simulation design of vibration source in satellite optical communication system[J]. Acta Optica Sinica, 2016, 36(12):74-80.(in Chinese) http://www.bigengculture.com/kejilunwen/xinxigongchenglunwen/418893.html [14] 黄龙, 张文会.潜望式激光通信瞄准机构误差计算[J].中国光学, 2015, 8(5):841-844. http://www.chineseoptics.net.cn/CN/abstract/abstract9353.shtmlHANG L, ZHANG W H. Error calculation of periscope pointing assembly for laser communication[J]. Chinese Optics, 2015, 8(5):841-844.(in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract9353.shtml [15] 李少辉, 陈小梅, 倪国强.高精度卫星激光通信地面验证系统[J].光学 精密工程, 2017, 25(5):1149-1158. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgjg200702001LI SH H, CHEN X M, NI G Q. High precision satellite laser communication ground verification system[J]. Opt. Precision Eng., 2017, 25(5):1149-1158.(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgjg200702001 [16] 于笑楠, 佟首峰, 董岩, 等.空间激光通信组网单光束跟踪子系统[J].光学 精密工程, 2014, 22(12):3348-3353. http://www.eope.net/gxjmgc/article/2014/2014-12-3348.htmYU X N, TONG SH F, DONG Y, et al.. Space laser communication network single beam tracking subsystem[J]. Opt. Precision Eng., 2014, 22(12):3348-3353.(in Chinese) http://www.eope.net/gxjmgc/article/2014/2014-12-3348.htm -

 下载:
下载:






计量
- 文章访问数: 4548
- HTML全文浏览量: 1381
- PDF下载量: 527
- 被引次数: 0
