


-
摘要: 无扫描激光三维成像雷达具有体积小、质量轻、高分辨率、高精度和对动态目标无失真成像等优点,目前已成为许多国家研究的重点和热点。本文阐述了闪光式、光子计数、增益调制型等7种无扫描激光三维成像雷达体制和距离选通成像技术的基本原理,追踪并归纳了其研究进展,对比分析了各体制的技术优劣,并从核心器件角度分析了发展趋势。结论如下:采用2D传感器在光学层面进行时间信息转换实现三维成像的方法具有高分辨率、高能量利用率和高信噪比等特点,在航天、测绘、军事、民用等领域具有突出优势和应用前景。Abstract: The non-scanning laser 3D imaging radar has the advantages of small size, light weight, high resolution, high precision and distortion-free imaging of dynamic targets, and has become the focus and hotspot of research in many countries. In this paper, we describe the basic principles of seven kinds of non-scanning laser three-dimensional imaging radar systems and distance gated imaging technology, such as flash, photon counting and gain modulation. The progress of the research is traced and summarized, and the technical advantages and disadvantages of each system are compared and analyzed. The trend is analyzed from the perspective of core devices. The results show that the method of using 2D sensor to convert time information on the optical level to realize 3D imaging has the characteristics of high resolution, high energy utilization and high signal-to-noise ratio, and has outstanding advantages and application prospects in aerospace, surveying and mapping, military and civil fields.
-
Key words:
- scannerless /
- imaging ladar /
- 2D sensor /
- optical time of flight
-

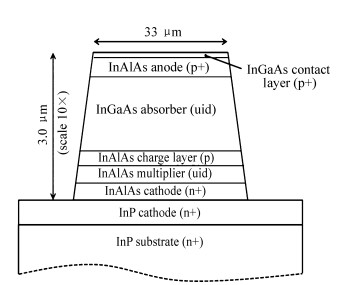
图 3 美国DRS公司生产的HgCdTe LM-APDs截面图和俯视图
Figure 3. Cross-sectional and top view of HgCdTe LM-APDs from US DRS company

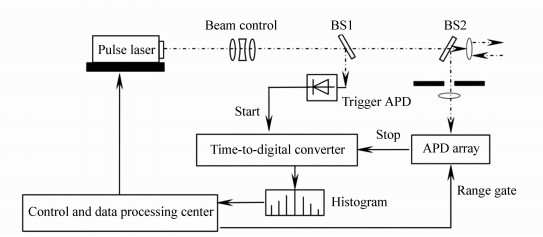
图 4 光子计数三维成像激光雷达原理框图
Figure 4. Schematic black diagram of photon counting three-dimensional imaging radar

图 6 双通道单增-恒定增益调制成像激光雷达工作原理图
Figure 6. Working principle diagram of dual-channel single-gain-constant gain modulation imaging laser radar

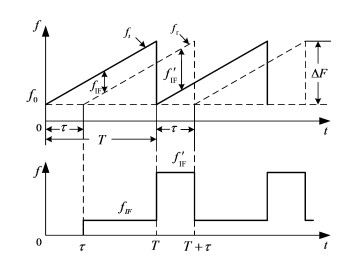
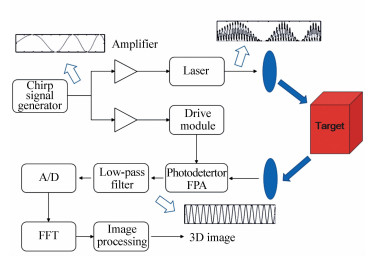
图 10 FMCW三维成像激光雷达系统原理框图
Figure 10. Principle block diagram of FMCW three-dimensional imaging lidar system

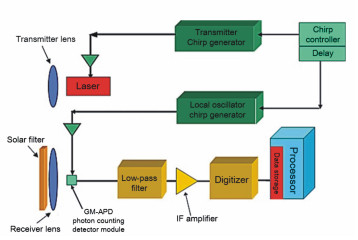
图 11 基于GM-APD的FMCW激光雷达测距系统原理框图
Figure 11. Principle block diagram of FMCW kidar ranging system based on GM-APD

图 12 基于ICCD的鉴相式激光测距原理框图
Figure 12. Principle block diagram of ICCD-based phase-discrimination laser ranging

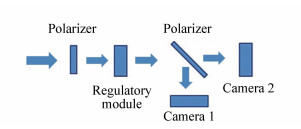
图 14 偏振调制激光测距原理框图
Figure 14. Principle block diagram of polarization modulation laser ranging

图 16 两种偏振调制体制的成像效果对比图
Figure 16. Comparison of two kinds of polarization modulation imaging system

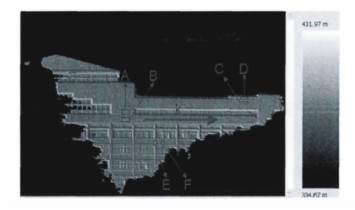
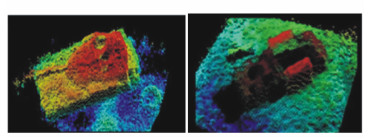
图 20 条纹管激光雷达对地面场景三维成像图
Figure 20. Striped tube laser radar on the ground scene three-dimensional imaging

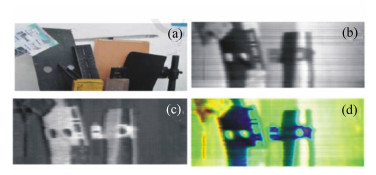
图 21 待测目标的(a)实物图、(b)强度像、(c)偏振像、(d)融合图像
Figure 21. Physical map of the target (a)under test image, (b)intensity image, (c)polarization image, (d)fusion image
表 1 FOPEN三维成像激光雷达性能参数
Table 1. Performance parameters of FOPEN 3D imaging laser radar
Project Performance Laser 1 550 nm, 1 W Received lens Aperture:35 mm
Focal length:50 mmDetector 640×512 InGaAs EBAPS; Ranging Accuracy 25 m:3 cm FoV 35°×35° Frame rate >1 Hz  下载: 导出CSV
下载: 导出CSV
表 2 7种无扫描激光成像雷达系统部分性能比较
Table 2. Performance comparison of seven scanless laser imaging radar systems
Based on LM-APDs Photon counting Gain modulation
(Dual channel)FMCW Phase ranging Polarization modulation Stripe tube
(Multiple-slit)Source Pulse Pulse Pulse CW CW Pulse Pulse Range <5 km >10 km <3 km <1 km <3 km >1 km <6 km Ranging Accuracy cm~m cm~m cm~m mm~dm mm~m mm~dm cm~m Range hole Exist Exist Exist No No Exist Exist Range ambiguity No No No No Exist No No Imaging speed Fast Low Fast Low Low Fast Fast Resolution 256×256 256×256 ICCD EBAPS ICCD Detector Detector Motion artifact No Exist No Exist Exist No No
下载: 导出CSV
-
[1] 戴永江.激光雷达技术[M].北京:电子工业出版社, 2010.DAI Y J. Lidar Technology[M]. Beijing:Electronic Industry Press, 2010.(in Chinese) [2] 赵一鸣, 李艳华, 商雅楠, 等.激光雷达的应用及发展趋势[J].遥测遥控, 2014, 35(5):4-22. doi: 10.3969/j.issn.2095-1000.2014.05.002ZHAO Y M, LI Y H, SHANG Y N, et al.. Lidar application and development trend[J]. Telemetry Remote Control, 2014, 35(5):4-22. (in Chinese) doi: 10.3969/j.issn.2095-1000.2014.05.002 [3] 陈念江.激光三维成像体制综述[J].激光与红外, 2015, 45(10):1152-1156. doi: 10.3969/j.issn.1001-5078.2015.10.002CHEN N J. Laser three-dimensional imaging system review[J]. Laser and Infrared, 2015, 45(10):1152-1156.(in Chinese) doi: 10.3969/j.issn.1001-5078.2015.10.002 [4] RICHARD D R, ROGER S, HOWARD B. Laser radar focal plane array for three-dimensional imaging[J]. Proceedings of SPIE, 1996, 2748:161-167. doi: 10.1117-12.243573/ [5] KEVIN L M, JIM M, REUBEN R, et al.. Critical advancement in telerobotic servicing vision technology[C]. AIAA SPACE 2010 Conference & Exposition, AIAA, Anaheim, California, 2010: 1-9. [6] ROHRSCHNEIDER R, MASCIARELLI J, MILLER K L, et al. An overview of ball flash Lidar and related technology development[C]. AIAA Guidance, Navigation, and Control(GNC) Conference, AIAA, 2013: 4642. [7] 宋一铄, 杜小平, 曾朝阳.国外空间目标激光三维成像雷达关键技术分析[J].装备学院学报, 2014, 25(1):55-60. doi: 10.3783/j.issn.2095-3828.2014.01.013SONG Y SH, DU X P, ZENG Z Y. Analysis of key technologies of laser 3D imaging radar for foreign space targets[J]. Journal of Equipment Academy, 2014, 25(1):55-60.(in Chinese) doi: 10.3783/j.issn.2095-3828.2014.01.013 [8] WILLIAMS G M, COMPTON M, RAMIREZ D A, et al.. Multi-gain-stage InGaAs avalanche photodiode with enhanced gain and reduced excess noise[J]. IEEE Journal of the Electron Devices Society, 2013, 1(2):54-65. doi: 10.1109/JEDS.2013.2258072 [9] MCKEAG W, VEEDER T, WANG J, et al.. New developments in HgCdTe APDs and LADAR receivers[J]. Proc. of SPIE, 2011, 8012:801230. doi: 10.1117/12.888099 [10] MCMANAMON P F, BANKS P S, BECK J D, et al.. Comparison of flash lidar detector options[J]. Optical Engineering, 2017, 56(3):031223. doi: 10.1117/1.OE.56.3.031223 [11] DE BORNIOL E D, ROTHMAN J, GUELLEC F, et al.. Active three-dimensional and thermal imaging with a 30-μm pitch 320×256 HgCdTe avalanche photodiode focal plane array[J]. Optical Engineering, 2012, 51(6):061305. doi: 10.1117/1.OE.51.6.061305 [12] ROHRSCHNEIDER R, WEIMER C, MASCIARELLI J, et al.. Vision Navigation Sensor(VNS) with adaptive Electronically Steerable Flash LIDAR(ESFL)[C]. AIAA Guidance, Navigation, and Control Conference, AIAA, 2016: 2096. [13] WANG F Y, YANG M, SONG W X, et al.. Circuit design of Single-Photon detector based on APD[J]. Chinese Journal of Electron Devices, 2016, 5:015. http://www.en.cnki.com.cn/Article_en/CJFDTotal-DZQJ201605015.htm [14] 邓光平, 刘昌举, 祝晓笑, 等.一种弱光成像用AlGaN APD阵列的读出电路设计[J].半导体光电, 2013(4):569-572. http://d.old.wanfangdata.com.cn/Periodical/bdtgd201304007DENG G P, LIU C J, ZHU X X, et al.. A readout circuit design for low-light imaging AlGaN APD arrays[J]. Semiconductor Optoelectronics, 2013(4):569-572.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/bdtgd201304007 [15] 陈国强, 张君玲, 王攀, 等.碲镉汞e-APD焦平面数字化读出电路设计[J].红外与激光工程, 2014, 43(9):2798-2804. doi: 10.3969/j.issn.1007-2276.2014.09.003CHENG G Q, QIANG J L, WANG P, et al.. HgCdTe e-APD focal plane digital readout circuit design[J]. Infrared and Laser Engineering, 2014, 43(9):2798-2804.(in Chinese) doi: 10.3969/j.issn.1007-2276.2014.09.003 [16] 张龙, 于德志, 宋昭, 等.基于GM-APD的成像激光雷达目标探测特性[J].光学与光电技术, 2013, 11(2):16-19. http://d.old.wanfangdata.com.cn/Periodical/gxygdjs201302004ZHANG L, YU D Z SONG Z, et al.. GM-APD-based imaging lidar target detection characteristics[J]. Optical and Optoelectronic Technology, 2013, 11(2):16-19.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxygdjs201302004 [17] ITZLER M A, ENTWISTLE M, JIANG X, et al.. Geiger-mode APD single-photon cameras for 3D laser radar imaging[C]. 2014 IEEE Aerospace Conference, IEEE, 2014: 1-12. [18] JACK M, CHAPMAN G, EDWARDS J, et al.. Advances in LADAR components and subsystems at raytheon[J]. Proc. of SPIE, 2012, 8353:83532F doi: 10.1117/12.923683 [19] 郑丽霞, 吴金, 张秀川, 等.InGaAs单光子探测器传感检测与淬灭方式[J].物理学报, 2014, 63(10):222-230. http://d.old.wanfangdata.com.cn/Periodical/wlxb201410030ZHENG H X, WU J, ZHANG X C, et al.. InGaAs single photon detector sensing detection and quenching method[J]. Chinese Journal of Physics, 2014, 63(10):222-230.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/wlxb201410030 [20] 孙剑峰, 姜鹏, 张秀川, 等.32×32面阵InGaAs GM-APD激光主动成像实验[J].红外与激光工程, 2016, 45(12):89-93. http://d.old.wanfangdata.com.cn/Periodical/hwyjggc201612015SUN J F, JIANG P, ZHANG X C, et al.. 32×32 Planar InGaAs GM-APD laser active imaging experiment[J]. Infrared and Laser Engineering, 2016, 45(12):89-93.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/hwyjggc201612015 [21] HABBIT JR R D, NELLUMS R O, NIESE A D, et al.. Utilization of flash ladar for cooperative and uncooperative rendezvous and capture[J]. Proc. of SPIE, 2003, 5088:146-157. doi: 10.1117/12.512864 [22] 靳辰飞, 赵远, 张勇, 等.一种无扫描三维成像激光雷达的实验研究[J].中国激光, 2009, 36(6):1383-1387. http://d.old.wanfangdata.com.cn/Periodical/zgjg200906013YI C F, ZHAO Y, ZHANG Y, et al.. Experimental research on a non-scanning 3D imaging kidar[J]. China Laser, 2009, 36(6):1383-1387.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/zgjg200906013 [23] JIN C, SONG Z, ZHANG S, et al.. Investigation of range accuracy of gain-modulated laser range imaging[J]. Proc. of SPIE, 2013, 8905:610-614. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=CC0214283916 [24] 张艺婷.双ICCD增益调制激光雷达的精度研究[D].哈尔滨: 哈尔滨工业大学, 2015. http://cdmd.cnki.com.cn/Article/CDMD-10213-1015981253.htmZHANG Y T. Research on accuracy of dual ICCD gain-modulated lidar[D]. Harbin: Harbin Institute of Technology, 2015.(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10213-1015981253.htm [25] 屠志鹏, 李思宁, 张大勇, 等.基于增益调制的激光成像准确度研究[J].光子学报, 2016, 45(1):110003-0110003. http://d.old.wanfangdata.com.cn/Periodical/gzxb201601003TU Z P, LI S L, ZHANG D Y, et al.. Research on laser imaging accuracy based on gain modulation[J]. Journal of Photonics, 2016, 45(1):110003-0110003.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gzxb201601003 [26] 张秀达.新型三维主动光学成像理论与系统研究[D].杭州: 浙江大学, 2008. http://cdmd.cnki.com.cn/Article/CDMD-10335-2008084016.htmZHANG X D. New 3D active optical imaging theory and system research[D]. Hangzhou: Zhejiang University, 2008. (in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10335-2008084016.htm [27] 胡剑.凝视成像三维激光雷达系统的研究[D].杭州: 浙江大学, 2013. http://cdmd.cnki.com.cn/Article/CDMD-10335-1013185718.htmHU J. Research on Staring 3D Lidar System[D]. Hangzhou: Zhejiang University, 2013.(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10335-1013185718.htm [28] BARRY L S, WILLIAM C R, ZOLTAN G S. Intensity-modulated diode laser radar using frequency-modulated/continuous-wave ranging techniques[J]. Optical Engineering, 1996, 35(11):3270-3278. doi: 10.1117/1.601067 [29] WILLIAM R, JOHN B, STEVE K, et al.. Self-mixing detector candidates for an FM/CWladar architecture[J]. Proc. of SPIE, 2000, 4035:152-162. doi: 10.1117/12.397787 [30] BRIAN C R, WILLIAM R, BARRY L S, et al.. Anti-ship missile tracking with a chirped AM ladar-update:design, model predictions, and experimental results[J]. Proc. of SPIE, 2005, 5791:330-342. doi: 10.1117/12.603637 [31] REDMAN B, RUFF W, GIZA M. Photon counting chirped AM ladar:concept, simulation, and initial experimental results[J]. Proc. of SPIE, 2006, 6214:62140P. doi: 10.1117/12.667117 [32] 张子静.GM-APD啁啾幅度调制激光雷达对遮蔽目标的成像研究[D].哈尔滨: 哈尔滨工业大学, 2011. http://cdmd.cnki.com.cn/Article/CDMD-10213-1012002031.htmZHANG Z J. GM-APD amplitude modulation lidar imaging of shadowing targets[D]. Harbin: Harbin Institute of Technology.2011.(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10213-1012002031.htm [33] ZHANG Z, WU L, ZHANG Y, et al.. Method to improve the signal-to-noise ratio of photon-counting chirped amplitude modulation ladar[J]. Applied Optics, 2013, 52(2):274-279. doi: 10.1364/AO.52.000274 [34] 杜小平, 宋一铄, 曾朝阳.调频连续波激光雷达目标相对距离及径向速度信息提取方法[J].航空学报, 2014, 35(2):523-531. http://d.old.wanfangdata.com.cn/Periodical/hkxb201402024DU X P, SONG Y S, ZENG Z Y. Relative distance and radial velocity information extraction method for FMCW LIDAR target[J]. Journal of Aeronautics, 2014, 35(2):523-531.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/hkxb201402024 [35] 张爱民, 江南.水下微光成像的ICCD光路耦合仿真[J].国外电子测量技术, 2013, 32(11):17-22. doi: 10.3969/j.issn.1002-8978.2013.11.007ZHANG A M, JIANG N. ICCD optical coupling simulation of underwater low light imaging[J]. Foreign Electronic Measurement Technology, 2013, 32(11):17-22.(in Chinese) doi: 10.3969/j.issn.1002-8978.2013.11.007 [36] 徐茜茜.微光ICCD的噪声特性测试与分析[D].南京: 南京理工大学, 2015. http://cdmd.cnki.com.cn/Article/CDMD-10288-1015366049.htmXU Q Q. Noise characteristic test and analysis of low light ICCD[D]. Nanjing: Nanjing University of Science and Technology.2015.(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10288-1015366049.htm [37] 陈沁, 王华村, 胡鑫, 等.空间光调制器及其在空间光通信中的应用[J].激光与光电子学进展, 2016, 53(5):86-92. http://kns.cnki.net/KCMS/detail/detail.aspx?filename=JGDJ201605008&dbname=CJFD&dbcode=CJFQCHEN Q, WANG H C, HU X, et al.. Spatial light modulator and its application in space optical communication[J]. Progress in Laser and Optoelectronics, 2016, 53(5):86-92.(in Chinese) http://kns.cnki.net/KCMS/detail/detail.aspx?filename=JGDJ201605008&dbname=CJFD&dbcode=CJFQ [38] 张立臣, 汪韬, 尹飞, 等.高响应度GaAs-MSM光电自混频面阵器件[J].激光与红外, 2011, 41(8):925-928. doi: 10.3969/j.issn.1001-5078.2011.08.021ZHANG L C, WANG T, YIN F, et al.. High responsivity GaAs-MSM photoelectric self-mixing array device[J]. Laser and Infrared, 2011, 41(8):925-928.(in Chinese) doi: 10.3969/j.issn.1001-5078.2011.08.021 [39] 宋德, 石峰, 李野.基底均匀掺杂下EBAPS电荷收集效率的模拟研究[J].红外与激光工程, 2016, 45(2):56-60. http://d.old.wanfangdata.com.cn/Periodical/hwyjggc201602008SONG D, SHI F, LI Y. Simulation of EBAPS charge collection efficiency under uniform doping of substrate[J]. Infrared and Laser Engineering, 2016, 45(2):56-60.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/hwyjggc201602008 [40] 徐恒梅, 付永庆.相位法激光测距系统[J].应用科技, 2010, 37(6):20-22. http://d.old.wanfangdata.com.cn/Periodical/jgyhw201603007XU H M, FU Y Q. Phase method laser ranging system[J]. Applied Technology, 2010, 37(6):20-22.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jgyhw201603007 [41] JOHN P A, PHIL G, JOE T, et al.. Non-scanned LADAR imaging and applications[J]. Proceedings of SPIE, 1993, 1936:11-22. doi: 10.1117/12.157111 [42] ROBERT D H, ROBERT O N, AARON D N, et al.. Utilization of flash ladar for cooperative and uncooperative rendezvous and capture[J]. Proceedings of SPIE, 2003, 5088:146-157. doi: 10.1117/12.512864 [43] NELLUMS R O, HABBIT R D, HEYING M R, et al.. 3D scannerless ladar for orbiter inspection[J]. Proc. of SPIE, 2006, 6220:62200G. doi: 10.1117/12.670569 [44] 李燕.无扫描激光雷达测距新方法研究[D].杭州: 浙江大学, 2007. http://cdmd.cnki.com.cn/Article/CDMD-10335-2007078854.htmLI Y. Research on a New method of scanning laser radar ranging[D]. Hangzhou: Zhejiang University, 2007.(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10335-2007078854.htm [45] 邓志辉.并行鉴相测距激光雷达[J].实验科学与技术, 2011, 9(5):29-30. doi: 10.3969/j.issn.1672-4550.2011.05.010DENG Z H. Parallel phase-detection ranging laser radar[J]. Experimental Science and Technology, 2011, 9(5):29-30.(in Chinese) doi: 10.3969/j.issn.1672-4550.2011.05.010 [46] TABOADA J, TAMBURINO L A. Laser imaging and ranging system using two cameras: US, 5157451[P].1992-10-20. [47] ZHANG P, DU X, ZHAO J, et al.. High resolution flash three-dimensional lidar systems based on polarization modulation[J]. Applied Optics, 2017, 56(13):3889. doi: 10.1364/AO.56.003889 [48] 彭章贤.面阵三维成像激光雷达接收试验系统研究[D].成都: 中国科学院研究生院(光电技术研究所), 2016. http://cdmd.cnki.com.cn/Article/CDMD-80151-1016757876.htmPENG Z X. Research on three-dimensional imaging lidar reception test system[D]. Chengdu: Graduate School of Chinese Academy of Sciences(Institute of Optoelectronic Technology), 2016.(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-80151-1016757876.htm [49] GELBART A, REDMAN B C, LIGHT R S, et al.. Flash lidar based on multiple-slit streak tube imaging lidar[J]. Proc. of SPIE, 2002, 4723:9-19. doi: 10.1117/12.476407 [50] 梁小雪.条纹管激光雷达偏振成像实验研究[D].哈尔滨: 哈尔滨工业大学, 2010. http://cdmd.cnki.com.cn/Article/CDMD-10213-1011261504.htmLIANG X X. Experimental study on polarization umaging of striped laser lidar[D]. Harbin: Harbin Institute of Technology, 2010.(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10213-1011261504.htm [51] 郜键.条纹管激光成像雷达海面小尺度波探测探潜技术研究[D]哈尔滨: .哈尔滨工业大学, 2014. http://cdmd.cnki.com.cn/Article/CDMD-10213-1014084835.htmGAO J. Research on small-scale wave exploration and prospecting technology of stripe tube laser imaging radar[D]. Harbin: Harbin Institute of Technology, 2014.(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10213-1014084835.htm [52] 夏文泽, 韩绍坤, 曹京亚.条纹管成像激光雷达仿真技术研究[J].系统仿真学报, 2016, 28(12):3027-3032. http://d.old.wanfangdata.com.cn/Periodical/xtfzxb201612021XIA W Z, HAN S K, CAO J Y. Research on simulation technology of striped tube imaging laser radar[J]. Journal of System Simulation, 2016, 28(12):3027-3032.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/xtfzxb201612021 [52] 官斌, 何大华.距离选通切片图像高精度三维重构方法[J].光学与光电技术, 2017, 15(6):9-13. http://d.old.wanfangdata.com.cn/Periodical/gxygdjs201706003GUAN B, HE D H. High-precision three-dimensional reconstruction method of distance slice images[J]. Optical and Optoelectronic Technology, 2017, 15(6):9-13.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxygdjs201706003 [54] 田东康.基于激光距离选通成像系统的三维图像重构[D].北京: 北京理工大学, 2016. http://cdmd.cnki.com.cn/Article/CDMD-10007-1016716594.htmTIAN D K. Three-dimensional image reconstruction based on laser range gating imaging system[D]. Beijing: Beijing Institute of Technology, 2016.(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10007-1016716594.htm [55] GRASSO R J, ODHNER J E, WIKMAN J C, et al.. A novel low-cost targeting system(LCTS) based upon a high-resolution 2D imaging laser radar[J]. Proc. of SPIE, 2005, 5988:59880L. doi: 10.1117/12.630525 [56] ANDERSSON A. Range Gated Viewing with Underwater Camera[M]. Institutionen för Systemteknik, 2005. [57] LUTZ Y, CHRISTNACHER F. Laser diode illuminator for night vision on-board a 155-mm artillery shell[J]. Proc. of SPIE, 2003, 5087:185-195. doi: 10.1117/12.513110 [58] MONNIN D, SCHNEIDER A L, CHRISTNACHER F, et al.. A 3D outdoor scene scanner based on a night-vision range-gated active imaging system[C]. Third International Symposium on 3D Data Processing, Visualization, and Transmission, IEEE, 2006: 938-945. [59] 范有臣, 赵洪利, 孙华燕, 等.激光主动成像结合距离选通技术的零时信号测量方法[J].红外与激光工程, 2016, 45(3):101-107. http://d.old.wanfangdata.com.cn/Periodical/hwyjggc201603016FANG Y C, ZHAO H L, SUN H Y, et al.. Zero-time signal measurement method of laser active imaging combined with range gating[J]. Infrared and Laser Engineering, 2016, 45(3):101-107.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/hwyjggc201603016 [60] 范有臣, 赵洪利, 孙华燕, 等.互相关算法在运动目标距离选通激光三维成像中的应用[J].红外与激光工程, 2016, 45(6):149-157. http://d.old.wanfangdata.com.cn/Periodical/hwyjggc201606024FANG Y C, ZHAO H L, SUN H Y, et al.. Application of cross-correlation algorithm in 3D imaging of distance laser gated[J]. Infrared and Laser Engineering, 2016, 45(6):149-157.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/hwyjggc201606024 [61] LAURENZIS M, CHRISTNACHER F, SCHOLZ T, et al.. Underwater laser imaging experiments in the baltic sea[J]. Proc. of SPIE, 2014, 9250:92500D. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=CC0214797364 [62] 王新伟, 曹忆南, 刘超, 等.2D/3D距离选通成像的低对比度目标探测[J].红外与激光工程, 2014, 43(9):2854-2859. doi: 10.3969/j.issn.1007-2276.2014.09.013WANG X W, CAO Y N, LIU C, et al.. Low-contrast target detection for 2D/3D range gating imaging[J]. Infrared and Laser Engineering, 2014, 43(9):2854-2859.(in Chinese) doi: 10.3969/j.issn.1007-2276.2014.09.013 [63] 徐涛, 杨克成, 夏珉, 等.基于距离选通成像的水下线状目标检测算法[J].激光与红外, 2017, 47(10):1321-1324. doi: 10.3969/j.issn.1001-5078.2017.10.025XU T, YANG K C, XIA M, et al.. Underwater linear target detection algorithm based on range gated imaging[J]. Laser and Infrared, 2017, 47(10):1321-1324.(in Chinese) doi: 10.3969/j.issn.1001-5078.2017.10.025 [64] JO S, KONG H J, BANG H, et al.. High range precision laser radar system using a Pockels cell and a quadrant photodiode[J]. Applied Physics B, 2016, 122(5):143. doi: 10.1007/s00340-016-6425-9 -

 下载:
下载:










计量
- 文章访问数: 5983
- HTML全文浏览量: 2396
- PDF下载量: 630
- 被引次数: 0
