


-
摘要: 为了满足无人机光电载荷的体积和重量要求,并有效解决传统凸轮机构加工精度要求高、系统易产生机械振荡等问题,提高系统的响应速度和变焦精度,对基于步进电机驱动实现连续变焦的直线变倍成像系统进行研究。采用二相混合式步进电机驱动实现机械补偿式变焦系统的变焦聚焦功能。首先,本文研究了基于步进电机的直线变倍成像系统的工作原理与构成,完成硬件平台的搭建,利用单片机控制实现步进电机的加减速过程。然后构造适合本系统的图像清晰度评价函数,并采用扫描反馈搜索算法完成对镜头焦距值的标定,将标定结果载入聚焦算法。最后,完成系统的性能测试。测试结果显示,采用速度控制模型后,步进电机的定位误差显著降低,范围在0.010 mm以下,整个系统的变焦精度远远小于1%,而且光学性能和外场拍摄性能较好。该基于步进电机的直线变倍成像系统满足无人机光电载荷的适用性要求。Abstract: In order to meet the volume and weight requirements of the unmanned aerial vehide's (UAV) photoelectric payload, and effectively solve the problem of the high requirement of processing precision of traditional cam mechanism, and the problem that the system is prone to mechanical oscillation and improve the response speed and zoom accuracy of the system, a continuous zooming imaging system based on stepping motor drive is studied. The zoom focus function of the mechanically compensated zoom system is realized by a two-phase hybrid stepping motor drive. First of all, the working principle and composition of continuous zooming imaging system based on stepping motor are investigated. The hardware platform is built, and the acceleration and deceleration process of stepping motor is controlled by single-chip. Then, the image sharpness evaluation function suitable for the system is constructed, and the scan focus search algorithm is used to complete the calibration of the focal length value of the lens, and the calibration result is loaded into the focus algorithm. Finally, the performance test of the system is performed. The test results show that by using the velocity control model, the relative error of the stepping motor displacement decreased significantly, which is below 0.010 mm, and the zooming accuracy of the whole system is far less than 1%, and the optical performance and field shooting performance are improved. The continuous zooming imaging system based on the stepping motor satisfies the applicability requirements of the photoelectric load of the UAV.
-

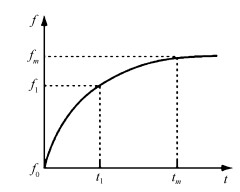
图 4 步进电机矩频特性及角加速度曲线
Figure 4. Torque-frequency characteristics and the curves of angular acceleration for stepping motor

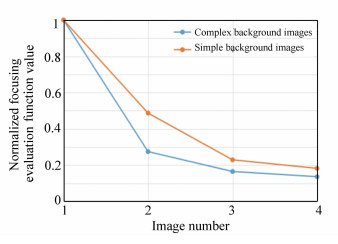
图 7 复杂背景各评价函数值折线图
Figure 7. Chart of evaluation function values for complex background image

图 9 简单背景各评价函数值折线图
Figure 9. Chart of evaluation function values for simple background image

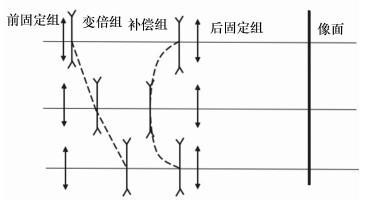
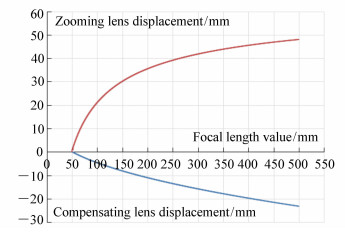
图 11 变倍组、补偿组位移与焦距值对应关系曲线
Figure 11. Relation curves of the displacements of zooming lens, compensating lens and the focal lengths

图 12 变倍组与补偿组位移关系曲线
Figure 12. Relation curve of displacements of zooming lens and compensating lens

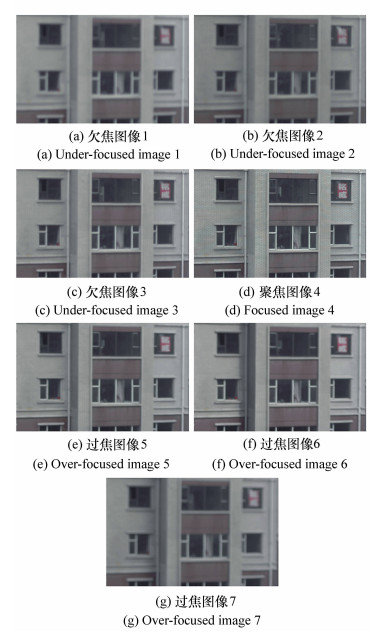
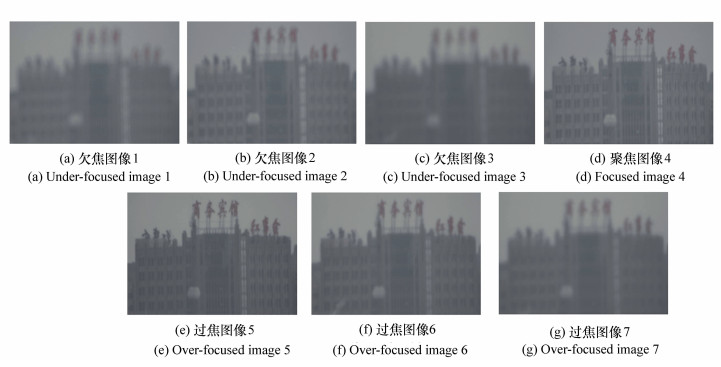
图 17 50 mm焦距焦点附近连续拍摄图像
Figure 17. Continuous imaging results in the area near focus under 50-mm focal length

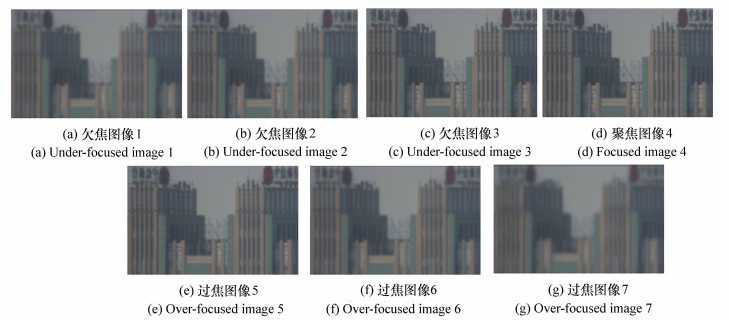
图 18 300 mm焦距焦点附近连续拍摄图像
Figure 18. Continuous imaging results in the area near focus under 300 mm focal length

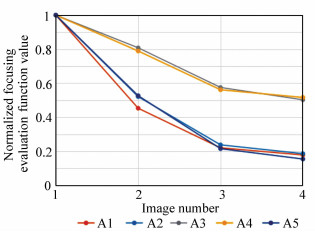
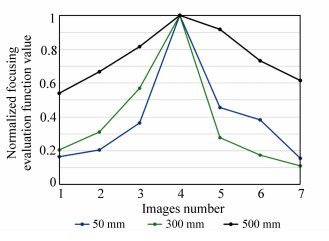
图 20 不同焦距下拍摄图像的归一化评价函数值
Figure 20. Normalized evaluation function values of the images under different focal lengths
表 1 焦距标定值与实测值结果
Table 1. Focal length calibration values and measured values
测量次数N 标定值f标/mm 实测值f测/mm 1 499.997 0 499.675 0 2 465.106 0 464.750 0 3 432.699 0 432.300 0 4 415.109 0 414.562 5 5 384.183 0 383.350 0 6 363.222 0 362.587 5 7 304.207 0 303.737 5 8 278.337 0 277.612 5 9 228.337 0 226.737 5 10 190.673 0 190.465 0 11 166.853 0 166.485 0 12 137.449 0 137.115 0 13 110.815 0 110.275 0 14 86.909 0 86.405 0 15 72.054 0 71.500 0 16 59.045 0 58.217 5  下载: 导出CSV
下载: 导出CSV
-
[1] 樊攀.基于数字图像处理的自动聚焦系统算法研究[D].哈尔滨: 哈尔滨工业大学, 2009. http://cdmd.cnki.com.cn/Article/CDMD-10213-2010064298.htmFAN P. Research on algorithm for auto-focus system based on digital image processing[D]. Harbin: Harbin Institute of Technology, 2009.(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10213-2010064298.htm [2] 王敏.适用于小型光电吊舱的光学变焦成像系统设计[D].天津: 天津大学, 2012. http://cdmd.cnki.com.cn/Article/CDMD-10056-1013039946.htmWANG M. Zoom imaging system design suitable for miniatureopto-electronic pod[D]. Tianjin: Tianjin University, 2012.(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10056-1013039946.htm [3] 蔡伟, 张新, 冯秀恒, 等.变焦距系统的变倍补偿方式[J].光学精密工程, 2011, 19(9):2063-2071. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201109011CAI W, ZHANG X, FENG X H, et al.. Compensating modes for zoom system[J]. Opt. Precision Eng., 2011, 19(9):2063-2071.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201109011 [4] 李零印.基于DSP/步进电机的连续变焦距系统设计[D].长春: 中国科学院长春光学精密机械与物理研究所, 2011.LI L Y. Design of zoom lens system based on DSP and stepping motor[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2011.(in Chinese) [5] 骆守俊, 夏寅辉, 杨宁宁, 等.扫描型长波红外连续变焦光学系统[J].中国光学, 2014, 8(1):107-113. http://www.chineseoptics.net.cn/CN/abstract/abstract9222.shtmlLUO SH J, XIA Y H, YANG N N, et al.. Long-wavelength infrared continuous zoom scanning optical system[J]. Chinese Optics, 2014, 8(1):107-113.(in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract9222.shtml [6] 李零印, 王一凡, 王骥.靶场光学测量中的变焦距光学系统[J].中国光学, 2011, 4(3):240-246. doi: 10.3969/j.issn.2095-1531.2011.03.004LI L Y, WANG Y F, WANG J. Vaitfocal optical system to optical measurement of shooting range[J]. Chinese Optics, 2011, 4(3):240-246.(in Chinese) doi: 10.3969/j.issn.2095-1531.2011.03.004 [7] 杨为锦, 孙强.中波红外连续变焦系统设计[J].中国光学与应用光学, 2010, 3(2):164-169. doi: 10.3969/j.issn.2095-1531.2010.02.011YANG W J, SUN Q. Design of middle infrared continuous zoom system[J]. Chinese Journal of Optics and Applied Optics, 2010, 3(2):164-169.(in Chinese) doi: 10.3969/j.issn.2095-1531.2010.02.011 [8] 贾庆莲, 王春霞.连续变焦镜头焦距输出结构的设计[J].中国光学与应用光学, 2010, 3(6):649-652.. doi: 10.3969/j.issn.2095-1531.2010.06.018JIA Q L, WANG CH X. Mechanism design of focal output for zoom lens[J]. Chinese Journal of Optics and Applied Optics, 2010, 3(6):649-652.(in Chinese) doi: 10.3969/j.issn.2095-1531.2010.06.018 [9] 邹华, 张孟伟.用步进电机实现连续变焦距光学镜头的变焦控制[J].光电工程, 2003, 30(1):29-31. doi: 10.3969/j.issn.1003-501X.2003.01.008ZOU H, ZHANG M W. Realization of zooming control for a continuous zoom optical lens with step motor[J]. Opto-Electronic Engineering, 2003, 30(1):29-31.(in Chinese) doi: 10.3969/j.issn.1003-501X.2003.01.008 [10] 徐煜明.步进电机速度控制的研究与实现[J].工矿自动化, 2007, 2:82-85. http://d.old.wanfangdata.com.cn/Periodical/mkzdh200702030XU Y M. Research and realization of the step motor speed control[J]. Industry and Mine Automation, 2007, 2:82-85.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/mkzdh200702030 [11] 陈芳, 张存继, 韩延祥, 等.简单图像的快速聚焦[J].光学精密工程, 2014, 22(1):220-227. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201401031CHEN F, ZHANG C J, HAN Y X, et al.. Fast focus on simple images[J]. Opt. Precision Eng., 2014, 22(1):220-227.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201401031 [12] 周丽平, 孙志峻, 张泉.显微视觉系统的自动聚焦及控制[J].光学精密工程, 2013, 21(3):807-812. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201303035ZHOU L P, SUN ZH J, ZHANG Q. Auto-focusing and control of micro-vision system[J]. Opt. Precision Eng., 2013, 21(3):807-812.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201303035 [13] 洪裕珍, 任国强, 孙健.离焦模糊图像清晰度评价函数的分析与改进[J].光学精密工程, 2014, 22(12):3401-3408. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201412034HONG Y ZH, REN G Q, SUN J. Analysis and improvement on sharpness evaluation function of defocused image[J]. Opt. Precision Eng., 2014, 22(12):3401-3408.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201412034 [14] 王景中, 王媛媛.离焦模糊图像退化函数的研究[J].2010亚太地区信息论学术会议, 中国, 北京, 2010:65-67. http://d.old.wanfangdata.com.cn/Conference/7537524WANG J ZH, WANG Y Y. The degradation function of defocused images[J]. 2010 Asia Pacific Conference on Information Theroy, Beijing, China.2010:65-67.(in Chinese) http://d.old.wanfangdata.com.cn/Conference/7537524 [15] 罗钧, 孙力, 闵志盛.变焦跟踪曲线在对焦中的应用[J].光学精密工程, 2011, 19(10):2326-2332. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201110004LUO J, SUN L, MIN ZH SH. Application of zoom tracking curves in focusing[J]. Opt. Precision Eng., 2011, 19(10):2326-2332.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201110004 [16] 米阳, 朱玮, 张淑梅.基于双直线电机的光学镜头连续变焦控制[J].吉林大学学报(工学版), 2011, 41(2):296-300. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK201102825001MI Y, ZHU W, ZHANG SH M. Continuous zooming control for zoom lens based on double linear motors[J]. Journal of Jilin University(Engineering and Technology Edition), 2011, 41(2):296-300.(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK201102825001 [17] 陈自宽, 翟宏琛, 母国光.光电成像系统中的光学传递函数[J].光学技术, 1998, 1:57-63. http://d.old.wanfangdata.com.cn/Periodical/gzxb200312013CHEN Z K, QU H CH, MU G G. Optical transfer function in an opto-electronic scanning imager[J]. Optical Technology, 1998, 1:57-63.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gzxb200312013 [18] 田铁印, 王红.长焦距大口径连续变焦距光学系统[J].光学精密工程, 2014, 22(9):2369-2374. http://d.old.wanfangdata.com.cn/Periodical/yygx200705010TIAN T Y, WANG H. Optical zoom system with long focal length and large aperture[J]. Opt. Precision Eng., 2014, 22(9):2369-2374.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/yygx200705010 -

 下载:
下载:






计量
- 文章访问数: 1572
- HTML全文浏览量: 336
- PDF下载量: 283
- 被引次数: 0
