


-
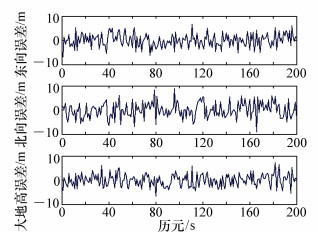
摘要: 目标定位是无人机侦察系统中至关重要一步。为增强无人机侦察目标定位的实时性、提高定位精度及侦察效率,提出一种多目标实时定位的方法,建立主次目标定位几何关系及坐标转换模型,结合已知数据信息求取各目标大地坐标,并用蒙特卡洛法分析目标定位误差。最后,基于即将组网成功"北斗二代"卫星导航系统对无人机空中定位,同时采用递归最小二乘算法滤波处理,提高了目标定位精度。研究及实验结果表明,北斗导航定位能够有效提高无人机空中定位精度,且有望达到厘米级精度,同时采用RLS滤波处理能使目标定位精度提高10 m左右。该方法能够有效增强无人机定位实时性,提高定位精度及侦察效率。Abstract: Target location is a crucial step in UAV reconnaissance system. In order to enhance the real-time performance of UAV reconnaissance target location and improve location precision, an effective multi-target real-time location method is proposed, which establishes the primary and secondary target location geometric relationship and coordinate transformation model, and combines known data to obtain each target geodetic coordinates, as well as analyzes target location error through Monte Carlo method. Finally, based on the upcoming successful establishment of the Beidou Ⅱ satellite navigation system for the aerial positioning of the UAV, and the filter processing using the Recursive Least Squares algorithm, the target location accuracy is improved. The research and experimental results show that Beidou Ⅱ navigation positioning can effectively improve the aerial positioning accuracy of the UAV, and it is expected to achieve centimeter-level accuracy. At the same time, the RLS filter processing can improve the target positioning accuracy by about 10 m. It is concluded that this method can effectively enhance the real-time positioning of UAVs, improve positioning accuracy and reconnaissance efficiency.
-

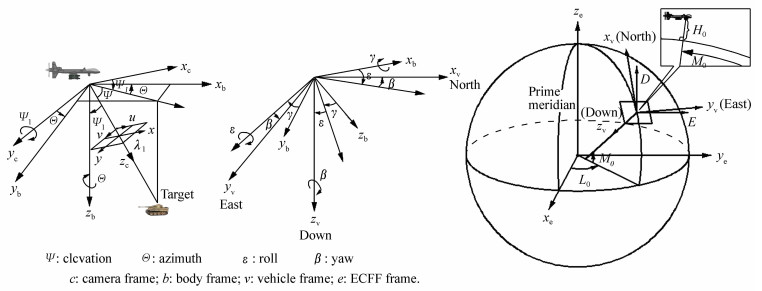
图 2 各坐标系的定义及其相互关系示意图
Figure 2. Schematic diagram of definition of the coordinate system and their mutual relations

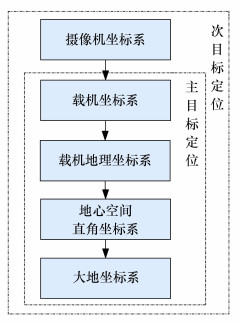
图 3 目标自主定位的坐标转换流程
Figure 3. Process of self-determination orientation coordinate conversion
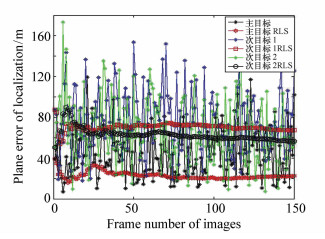
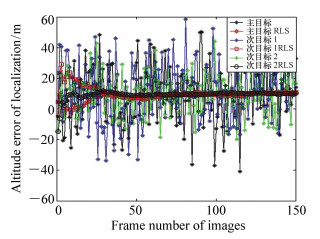
表 1 多目标定位误差
Table 1. Error of multi-target location
目标 经度定位误差/(°) 纬度定位误差/(°) 大地高定位误差/m 平面定位误差/m 主目标 0.000 103 4 0.000 200 6 21.64 49.89 次目标1 0.000 145 6 0.000 217 2 22.47 82.82 次目标2 0.000 111 9 0.000 203 7 19.89 70.46  下载: 导出CSV
下载: 导出CSV
表 2 RLS算法流程
Table 2. Flowchart of RLS algorithm
Algorithm RLS Filter: Input:xk, k=1, 2, …, t; Initialize:AN= I1×1; k=1, bN=[ ANT AN xk]; PN=()-1; Xk=PN ANT bN; And k=2, aN1= I1×1 If k≤t then PN1= PN- PN aN1T aN1 PN/(1+ aN1 PN aN1T); AN1=[ AN aN1]T; bN1=[ bN bN1]T; Xk= PN1 AN1T bN1; else if PN= PN1; AN= AN1; bN= bN1; k=k+1, bN1=[ xk]; return Xk
下载: 导出CSV
表 3 RLS滤波后多目标定位误差
Table 3. Errors of multi-target location after RLS filter
目标 经度定位误差/(°) 纬度定位误差/(°) 大地高定位误差/m 平面定位误差/m 主目标 0.000 093 4 0.000 191 6 9.64 23.06 次目标1 0.000 120 9 0.000 202 6 11.55 70.46 次目标2 0.000 105 3 0.000 207 1 10.63 62.94
下载: 导出CSV
-
[1] 孙辉, 李志强, 张建华, 等.机载光电平台目标交会定位[J].中国光学, 2015, 8(6):987-996. http://www.chineseoptics.net.cn/CN/abstract/abstract9357.shtmlSUN H, LI ZH Q, ZHANG J H, et al.. Target localization with intersection measurement for air borne electro-optical platform[J]. Chinese Optics, 2015, 8(6):987-996.(in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract9357.shtml [2] 闫辉, 许廷发, 吴青青, 等.多特征融合匹配的多目标跟踪[J].中国光学, 2014, 6(2):163-170. http://www.chineseoptics.net.cn/CN/abstract/abstract8903.shtmlYAN H, XU T F, WU Q Q, et al.. Multi-object tracking based on multi-feature joint matching[J]. Chinese Optics, 2014, 6(2):163-170.(in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract8903.shtml [3] 孙辉.机载光电平台目标定位与误差分析[J].中国光学, 2013, 6(6):912-918. http://www.chineseoptics.net.cn/CN/abstract/abstract8991.shtmlSUN H. Target localization and error analysis ofairborne electro-optical platform[J]. Chinese Optics, 2013, 6(6):912-918.(in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract8991.shtml [4] 刘晶红, 孙辉, 张葆, 等.航空光电成像平台的目标自主定位[J].光学精密工程, 2007, 15(8):1305-1309. doi: 10.3321/j.issn:1004-924x.2007.08.026LIU J H, SUN H, ZHANG B, et al.. Target self-determination orientation based on aerial photoelectric imaging platform[J]. Opt. Precision Eng., 2007, 15(8):1305-1309.(in Chinese) doi: 10.3321/j.issn:1004-924x.2007.08.026 [5] 宋悦铭, 孙敬辉, 王帅.基于GPS基准点的航空吊舱垂直下视目标定位方法研究[J].液晶与显示, 2012, 27(5):714-717. http://d.old.wanfangdata.com.cn/Periodical/yjyxs201205025SONG Y M, SUN J H, WANG S. Air pod target location method research using GPS datum mark in vertical down of view[J]. Chinese Journal of Liquid Crystals and Displays, 2012, 27(5):714-717.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/yjyxs201205025 [6] 闫明, 杜佩, 王惠林, 等.机载光电系统的地面多目标定位算法[J].应用光学, 2012, 33(4):717-720. http://d.old.wanfangdata.com.cn/Periodical/yygx201204013YAN M, DU P, WANG H L, et al.. Ground multi-target positioning algorithm for airborne optoelectronic system[J]. Journal of Applied Optics, 2012, 33(4):717-720.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/yygx201204013 [7] 徐诚, 黄大庆, 等.基于光电测量平台的多目标定位算法[J].中南大学学报(自然科学版), 2015, 46(1):175-163. http://www.cnki.com.cn/Article/CJFDTOTAL-ZNGD201501022.htmXU C, HUANG D Q. Multiple-target localization based on electro-optical measurement platform[J]. Journal of Central South University(Science and Technology), 2015, 46(1):157-163.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-ZNGD201501022.htm [8] 金光.机载光电跟踪测量的目标定位误差分析和研究[D].长春: 中国科学院长春光学精密机械与物理研究所, 2001: 3-6. http://cdmd.cnki.com.cn/Article/CDMD-80139-2002081659.htmJIN G. Studying and analyzing on the error of positioning in airborne photo-electricity tracking survey equipment[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2001: 3-6.(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-80139-2002081659.htm [9] 张葆, 姚俊峰, 高利民.机载GPS测量定位技术研究[J].光学精密工程, 2009, 17(1):1723-1728. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc200901027ZHANG B, YAOJ F, GAOL M. Measuring orientation technology based on airborne GPS[J]. Opt. Precision Eng., 2009, 17(1):1723-1728.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc200901027 [10] HAN K, DESOUG N. Multiple targets geo-location using SIFT and stereo vision on airborne video sequences[C]. The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, USA, 2009: 5327-5332. [11] REDDING J D, MCLAIN T W. Vision-based target localization from a small fixed-wing Miniature Air Vehicle[C]. Proceedings of the 2006 American Control Conference, Minneapolis, Minnesota, USA, 2006: 2862-2867. [12] 周前飞, 刘晶红, 熊文卓, 等.机载光电成像平台的多目标自主定位系统研究[J].光学学报, 2015, 35(1):1-15. http://www.cnki.com.cn/Article/CJFDTOTAL-GXXB201501021.htmZHOU Q F, LIU J H, XIONG W ZH, et al.. Multi-Target self-determination orientation system based onairborne photoelectric imaging platform[J]. Acta Optica Sinica, 2015, 35(1):1-15.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-GXXB201501021.htm [13] MORBIDIF, MARIOTTINIG L. Active target tracking and cooperative localization for teams of aerial vehicles[J]. IEEE Transactions on Control Systems Technology, 2013, 21(5):1694-1707. doi: 10.1109/TCST.2012.2221092 [14] TOUSSAINTG J, DE LIMA P. Localizing RF Targets with Cooperative UAV[C]. Proceedings of 2007 American Control Conference, New York City, USA, 2007: 5928-5933. [15] 樊邦奎, 段连飞.无人机侦察目标定位技术[M].北京:国防工业出版社, 2014.FAN B K, DUAN L F. UAV Reconnaissance Target Location Technology[M]. Beijing:National Defense Industry Press, 2014. -

 下载:
下载:





计量
- 文章访问数: 3215
- HTML全文浏览量: 990
- PDF下载量: 356
- 被引次数: 0
