


A detection method based on line-structured light sensor for geometrical morphology of track slab
-
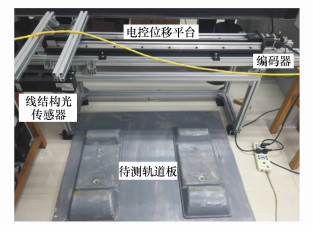
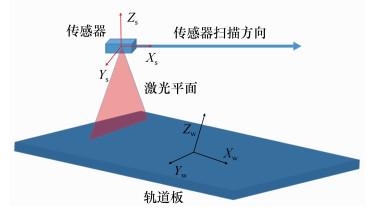
摘要: 轨道板的外形尺寸精度对于保证高速铁路轨道质量起着至关重要的作用,针对现有轨道板检测方法存在的问题,本文建立了一种基于线结构光传感器的轨道板测量系统并提出了基于轨道板点云数据的几何参数测量方法。线结构光传感器按照固定间隔扫描CRTS Ⅲ型轨道板,获得点云数据;利用轨道板中特殊位置点云数据对整个点云数据进行位置和姿态的校正;最后根据特征参数定义,实现轨道板四项关键几何参数的快速非接触测量。实验结果表明,本文提出的测量方法测量精度可达0.2 mm,满足轨道板的在线检测要求Abstract: The dimensional accuracy of track slab plays an important role in ensuring the quality of the high-speed railway track. Aiming at the problems existing in the pressent track slam detection methods, we establish a track slam measurement system based on line-structured light sensor and propose a geometric parameter measurement method based on track slam point cloud data. The line-structured laser sensor scans the CRTS Ⅲ type track slab at regular intervals to obtain point cloud data. The position and attitude of the entire point cloud data are corrected by using the point cloud data at a special position in the track slam. Finally, according to the definition of the characteristic parameters, the rapid non-contact measurement of four key geometric parameters of track slab is realized. The experimental results show that the measurement accuracy of this proposed method can reach 0.2 mm, which meets the on-line detection requirements of track slabs.
-

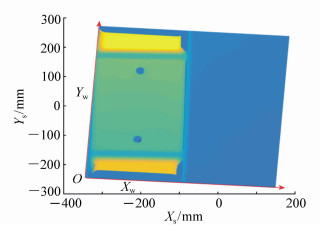
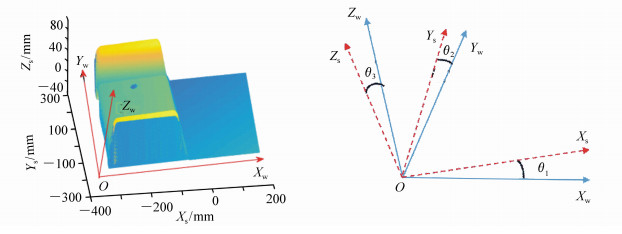
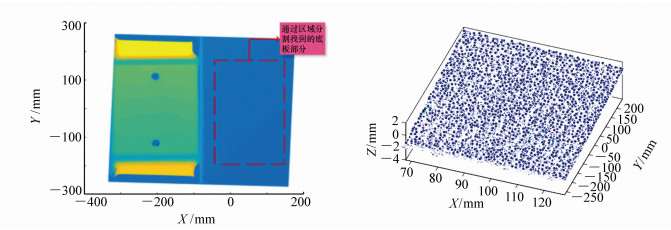
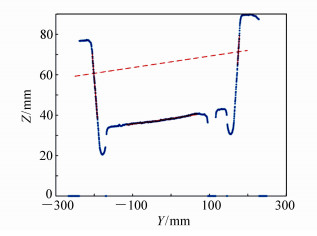
图 4 灰度信息和三维点云信息
Figure 4. Grayscale information and three dimensional point cloud information

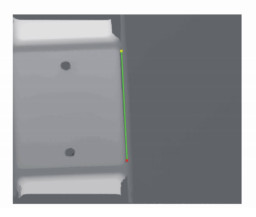
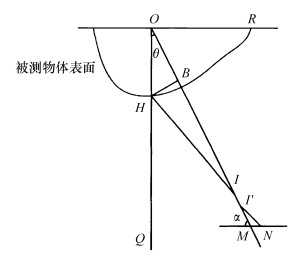
图 6 扫描方向与轨道板中轴线存在夹角
Figure 6. Angle between the central axis of track plate and scanning direction

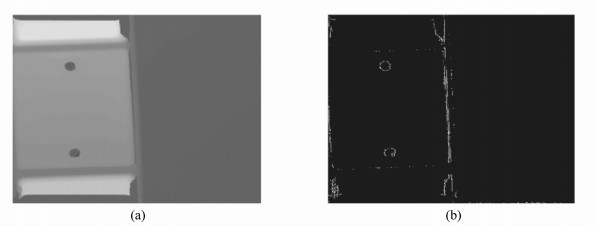
图 9 (a) 轨道板灰度矩阵图像; (b)边缘提取效果
Figure 9. (a)Grayscale matrix image of track plate; (b)extracted effect of edge
表 1 轨道板外形尺寸偏差及检测要求
Table 1. Dimension deviation and test requirements of track plate
检测项目 标准值 允许偏差 每批检测数量 承轨面坡度/(°) 1.430 ±0.2 全检 承轨台与钳口面夹角/(°) 110.00 ±1.0 全检 左钳口高度/mm 78.00 ±0.5 全检 右钳口高度/mm 88.00 ±0.5 全检 小钳口距离/mm 376.00 ±0.5 全检  下载: 导出CSV
下载: 导出CSV
表 2 测量结果
Table 2. Measurement results
测量参数 测量值(校正前) 测量误差(校正前) 测量值(校正后) 测量误差(校正后) 承轨面坡度/(°) 1.410 0.020 1.432 0.002 左钳口夹角/(°) 112.454 2.454 110.636 0.634 右钳口夹角/(°) 108.448 1.552 109.860 0.140 左钳口高度/mm 78.15 0.15 78.10 0.10 右钳口高度/mm 88.42 0.42 88.20 0.20 小钳口距离/mm 376.43 0.43 376.13 0.13
下载: 导出CSV
-
[1] 陈兴, 范叹奇.高速铁路CRTSⅡ型轨道板几何尺寸检测技术及方法[J].铁道勘察, 2010, 36(2):8-10. doi: 10.3969/j.issn.1672-7479.2010.02.003CHEN X, FAN T Q. Testing technology for geometric size of CRTS·Ⅱ track slabs on high speed railway as well as its method[J]. Railway Investigation and Surveying, 2010, 36(2):8-10.(in Chinese) doi: 10.3969/j.issn.1672-7479.2010.02.003 [2] 韩彦军, 智小慧, 蔡鹤.CRTSⅡ型轨道板磨床激光测量方法研究[J].机床与液压, 2013, 41(1):42-44. doi: 10.3969/j.issn.1001-3881.2013.01.012HAN Y J, ZHI X H, CAI H. Study on the laser measurement system of special grinder for CRTSⅡ ballastless track slab[J]. Machine Tool & Hydraulics, 2013, 41(1):42-44.(in Chinese) doi: 10.3969/j.issn.1001-3881.2013.01.012 [3] 杜熙光.高铁无砟轨道静态检测方法研究[D].沈阳: 辽宁工程技术大学, 2015. http://cdmd.cnki.com.cn/Article/CDMD-10147-1016059559.htmDU X G. Research on method of ballastless track static detection High-speed Rail[D]. Shenyang: Liaoning Technical University, 2015.(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10147-1016059559.htm [4] 薛峰, 赵丽科, 柴雪松, 等.基于图像处理的铁路轨道板裂缝检测研究[J].铁道建筑, 2015, 12:123-126. http://d.old.wanfangdata.com.cn/Periodical/tdjz201512032XUE F, ZHAO L K, CHAI X S, et al.. Study on detecting crack in railway track slab based on image processing technology[J]. Railway Engineering, 2015, 12:123-126.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/tdjz201512032 [5] 吴成和, 卞春华, 朱挺, 等.基于数字图像处理的轨道板裂纹缺陷检测[J].光电技术应用, 2014, 29(1):49-64. doi: 10.3969/j.issn.1673-1255.2014.01.011WU CH H, BIAN CH H, ZHU T, et al.. Research on the algorithm for crack detection in slab track based on digital image processing[J]. Electro-Optic Technology Application, 2014, 29(1):49-64.(in Chinese) doi: 10.3969/j.issn.1673-1255.2014.01.011 [6] 韦合导.自动测量机器人在轨道板精调中的应用研究[J].中国铁路, 2014, 12:70-73. http://d.old.wanfangdata.com.cn/Periodical/zhongguotl201412019WEI H D. Research on application of automatic measuring robot in fine adjustment of track slab[J]. China Railways, 2014, 12:70-73.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/zhongguotl201412019 [7] 简治城.CRTS Ⅲ型无砟轨道板检测及精调[J].中国铁路, 2011, 4:38-40. http://d.old.wanfangdata.com.cn/Periodical/zhongguotl201104011JIAN ZH CH. Detection and fine adjustment of CRTSⅡ ballastless track slab[J]. China Railways, 2011, 4:38-40.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/zhongguotl201104011 [8] 梁毅, 许非, 李慧敏, 等.轨道板精调测量系统及其调整测量方法: 中国, 101067294[P].2007-06-08.LIANG Y, XU F, LI H M, et al.. Track slab fine adjustment measurement system and its adjustment measurement method: China, 101067294[P]. 2007-06-08.(in Chinese) [9] 马国鹭, 曾国英, 赵斌.基于无衍射姿态探针和全站仪组合测量空间隐藏坐标[J].光学精密工程, 2015, 23(2):363-370. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201502007MA G L, ZENG G Y, ZHAO B. Measurement of space coordinates in hidden parts by combining non-diffracting attitude probe and total station[J]. Opt. Precision Eng., 2015, 23(2):363-370.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201502007 [10] 王红亮.高速铁路CRTSⅢ型无砟轨道板及钢模质量检测技术[J].铁道建筑技术, 2014, 2:117-120. http://d.old.wanfangdata.com.cn/Periodical/tdjzjs201402027WANG H L. The quality detecting techniques for the slab and the mould of the CRTS Ill ballastless track of high speed railway[J]. Railway Construction Technology, 2014, 2:117-120.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/tdjzjs201402027 [11] 许磊.高速铁路Ⅲ型轨道板尺寸快速检测技术研究[J].铁道勘察, 2016, 42(3);5-8. doi: 10.3969/j.issn.1672-7479.2016.03.003XU L. Research on quick detection track slab of high speed railway[J]. Railway Investigation and Surveying, 2016, 42(3):5-8.(in Chinese) doi: 10.3969/j.issn.1672-7479.2016.03.003 [12] 范生宏.基于数字摄影测量的轨道板快速检测关键技术研究[D].北京: 中国矿业大学, 2014. http://cdmd.cnki.com.cn/Article/CDMD-11413-1014371393.htmFAN SH H. Research on the key technologies of track slab quick detection based on digital photogrammetry[D]. Beijng: China University of Mining & Technology, 2014.(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-11413-1014371393.htm [13] 卢书, 李宗春, 冯其强, 等.高铁轨道板快速检测方法研究[J].测绘工程, 2012, 21(6):56-59. doi: 10.3969/j.issn.1006-7949.2012.06.014LU SH, LI Z CH, FENG Q Q, et al.. Research on measuring high speed railway track slabs[J]. Engineering of Surveying and Mapping, 2012, 21(6):56-59.(in Chinese) doi: 10.3969/j.issn.1006-7949.2012.06.014 [14] 薛峰.轨道板关键几何尺寸快速检测系统的设计及应用[J].铁道建筑, 2016, 4:118-122. http://d.old.wanfangdata.com.cn/Periodical/tdjz201604030XUE F. Design and application of rapid inspection system for key geometric dimension of track slab[J]. Railway Engineering, 2016, 4:118-122.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/tdjz201604030 [15] 郭清达, 全燕鸣.应用摄像机位姿估计的点云初始配准[J].光学精密工程, 2017, 25(6):1635-1644. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201706028GUO Q D, QUAN Y M. Initial registration of point clouds using camera pose estimation[J]. Opt. Precision Eng., 2017, 25(6):1635-1644.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201706028 [16] 王向军, 曹雨, 周凯.二维合作目标的单相机空间位姿测量方法[J].光学精密工程, 2017, 25(1);274-280. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201701034WANG X J, CAO Y, ZHOU K. Methods of monocular pose measurement based on planar objects[J]. Opt. Precision Eng., 2017, 25(1);274-280.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201701034 -

 下载:
下载:





计量
- 文章访问数: 2385
- HTML全文浏览量: 868
- PDF下载量: 195
- 被引次数: 0
