


Quantative measuring technique for the temperature of flow fields in schlieren systems
doi: 10.3788/CO.20181105.0860
-
摘要: 为了研究纹影系统的温度场定量测量技术,本文详细阐述了纹影技术的定量测量原理,并通过分析流场纹影图像灰度大小与未被遮挡的光源像面积的关系,提出了一种新颖的流场温度定量测量的计算方法。首先,在光学平台上搭建了透射式纹影系统,将加热平台放置在该系统的测量区域,利用CCD相机将采集到的纹影图像上传到上位机进行图像处理,然后采用该算法计算得到温度场的测量值,并与热电偶的测量值相对比。实验结果表明:在室温20℃时,将加热平台的温度分别设定为50℃和90℃,纹影系统测量得到的温度值相对误差小于10%,证明了该计算方法的可靠性,实现了以纹影技术为基础的温度场定量测量。Abstract: In order to study temperature field measurement techniques of Schlieren systems, the principle of Schlieren quantitative measuring techniques is expounded. Based on the relationship between the grayness of a Schlieren image, along with the area of a light source, we propose an algorithm that is dependent on Schlieren to calculate flow field temperature. Firstly, a transmission Schlieren system is built on an optical platform and a hot plate is placed in the test area. Schlieren images are then captured by using a CCD camera, which are uploaded and stored on a computer for image processing. Finally, the algorithm is used to get the measured values of the temperature field, which then are compared with those by thermocouple measurement. The experimental results show that, when the temperature of the hot plate is set at 50℃ or 90℃, the relative errors of the flow field temperature measurement are less than 10%, the reliability of the algorithm is therefore proved and the quantitative measurement of temperature fields based on Schlieren techniques is realized.
-
Key words:
- schlieren /
- quantitative measurement /
- flow field /
- image gray magnitude
-

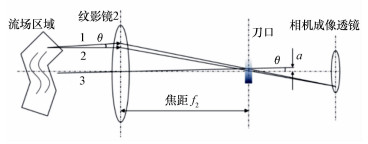
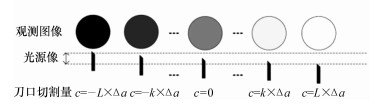
图 3 刀口切割量与光源像的位置关系示意图
Figure 3. Relationship between the position of the blade and light source image

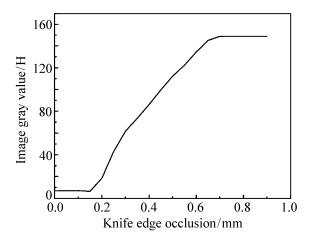
图 4 图像灰度与刀口遮挡量关系曲线
Figure 4. Curve of relationship between image grayness and blade edge occlusion

图 7 不同温度下加热平台上方纹影图像
Figure 7. Schlieren image on the heating platform at different temperatures

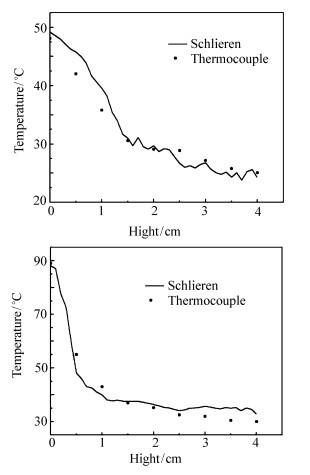
图 8 定量算法计算值与测温仪测量值比较图(上)50 ℃和(下)90 ℃
Figure 8. Schlieren image on the heating platform at different temperatures
表 1 Comparison table of measurement values at 50℃
Table 1. Comparison table of measurement values at 50℃
Height from hot plate/cm Calculation method/℃ Thermocouple measurement/℃ Relative error/% 0.0 49.3 48.3 2.07 0.5 46.1 43.2 4.39 1.0 40.0 37.6 6.38 1.5 31.5 30.2 4.30 2.0 30.0 28.3 6.01 2.5 27.2 26.5 2.64 3.0 26.3 25.1 4.78 3.5 24.4 26.0 6.15 4.0 23.0 25.2 8.73  下载: 导出CSV
下载: 导出CSV
表 2 Comparison table of measurement values at 90 ℃
Table 2. Comparison table of measurement values at 90 ℃
Height from hot plate/cm Calculation method/℃ Thermocouple measurement/℃ Relative error/% 0.0 88.3 55.2 59.6 0.5 53.5 55.1 2.90 1.0 42.0 40.6 3.45 1.5 37.5 36.7 2.18 2.0 36.0 34.4 4.65 2.5 34.2 33.0 3.63 3.0 33.9 32.5 4.30 3.5 32.4 30.0 8.00 4.0 31.9 29.7 7.40
下载: 导出CSV
-
[1] 张充, 李大海, 郭东华, 等.彩虹法和成像法测量玻璃微珠折射率对比研究[J].光学与光电技术, 2014, 12(2):29-34, 39. http://d.old.wanfangdata.com.cn/Periodical/gxygdjs201402006ZHANG CH, LI D H, GUO D H, et al.. Comparative study on the refractive index measurement of glass beads by rainbow and imaging method[J]. Optics & Optoelectronic Technology, 2014, 12(2):29-34, 39.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxygdjs201402006 [2] 丁珏, 黄传伟, 陈珣, 等.基于光调制技术的混浊介质空间散射光信号检测方法研究[J].光学与光电技术, 2014, 12(2):35-39. http://d.old.wanfangdata.com.cn/Periodical/gxygdjs201402007DING J, HUANG CH W, CHEN X, et al.. Study on the measurement method of spatially scattered light signals of turbid media based on optical modulaiton[J]. Optics & Optoelectronic Technology, 2014, 12(2):35-39.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxygdjs201402007 [3] 吕小亮.背景纹影技术的温度场测量[D].杭州: 浙江大学, 2011. http://cdmd.cnki.com.cn/Article/CDMD-10335-1011052317.htmLÜ X L. Temperature measurement based on background oriented schlieren[D]. Hangzhou: Zhejiang University, 2011.(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10335-1011052317.htm [4] 李云红, 孙晓刚, 原桂彬.红外热像仪精确测温技术[J].光学精密工程, 2007, 15(9):1336-1341. doi: 10.3321/j.issn:1004-924x.2007.09.005LI Y H, SUN X G, YUAN G B. Accurate measuring temperature with infrared thermal imager[J]. Opt. Precision Eng., 2007, 15(9):1336-1341.(in Chinese) doi: 10.3321/j.issn:1004-924x.2007.09.005 [5] 尚鸿鹏.基于背景纹影技术激光损伤材料的气流场测量[D].长春: 长春理工大学, 2014. http://cdmd.cnki.com.cn/Article/CDMD-10186-1015997101.htmSHANG H P. Based on BOS technique for the flow field measurements of laser damage material[D]. Changchun: Changchun University of Science and Technology, 2014.(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10186-1015997101.htm [6] 张宗权, 徐铭, 任俊鹏, 等.封闭玻璃管道内液体折射率的非接触测量[J].光学精密工程, 2016, 24(10):2408-2416. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201610008ZHANG Z Q, XU M, REN J P, et al.. Non-contact measurement for liquid refractive index in a closed pipe[J]. Opt. Precision Eng., 2016, 24(10):2408-2416.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201610008 [7] ALVAREZHERRERA C. Temperature measurement of an axisymmetric flame by using a schlieren system[J]. Journal of Optics A Pure & Applied Optics, 2008, 10(10):104014. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=JJ0211040738 [8] ALVAERZ-HERPE R A C, MORENO-HER NANDE Z D, BARRIENTDA-GADCTA B, et al.. Temperature measurement of air convection using a Schlieren system[J]. Optics & Laser Technology, 2009, 41(3):233-240. doi: 10.1063/1.2926987 [9] MARTINEZGONZALEZ A, GUERREROVIRAMONTES J A. Temperature and velocity measurement fields of fluids using a Schlieren system[J]. Applied Optics, 2012, 51(16):3519-3525. doi: 10.1364/AO.51.003519 [10] MARTINEZ-GONZALEZ A, MORENO-HERNANDEZ D, LEON-RDDRIGUEZ M, et al. Wide-range average temperature measurements of convective fluid flows by using a schlieren system[J]. Appl. Opt., 2016, 55(3):556-564. doi: 10.1364/AO.55.000556 [11] 叶继飞, 洪延姬.轴对称流场的彩色纹影密度场定量测量[J].红外与激光工程, 2013, 42(12):3335-3338. doi: 10.3969/j.issn.1007-2276.2013.12.032YE J F, HONG Y J. Quantitative measurement of density by color schlieren based on axial symmetry field[J]. Infrared and Laser Engineering, 2013, 42(12):3335-3338.(in Chinese) doi: 10.3969/j.issn.1007-2276.2013.12.032 [12] 蒋冠雷, 洪延姬, 叶继飞, 等.彩虹纹影定量测量实验方法研究[J].装备指挥技术学院学报, 2012, 23(1):127-131. doi: 10.3783/j.issn.1673-0127.2012.01.028JIANG G L, HONG Y J, YE J F, et al.. Experimental investigation of the quantitative measurement by rainbow Schlieren[J]. Journal of Equipment Command and Technology College, 2012, 23(1):127-131.(in Chinese) doi: 10.3783/j.issn.1673-0127.2012.01.028 [13] 孟晟.纹影定量化在火焰温度测量中的应用[D].杭州: 浙江工业大学, 2015. http://www.en.cnki.com.cn/Article_en/CJFDTOTAL-LTLC201504009.htmMENG SH. Application of quantitative schlieren method in flame temperature measurement[D]. Hangzhou: Zhejiang University of Technology, 2015.(in Chinese) http://www.en.cnki.com.cn/Article_en/CJFDTOTAL-LTLC201504009.htm [14] 孟晟, 杨臧健, 王明晓, 等.纹影定量化在火焰温度测量中的应用[J].实验流体力学, 2015, 29(4):65-69. http://d.old.wanfangdata.com.cn/Periodical/ltlxsyycl201504009MENG SH, YANG Z J, WANG M X, et al.. Application of quantitative schlieren method in flame temperature measurement[J]. Jourmal of ExperimentS in Fluid Mechanics, 2015, 29(4):65-69.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/ltlxsyycl201504009 [15] 张俊, 胥頔, 张龙.基于BOS技术的密度场测量研究[J].实验流体力学, 2015, 29(1):77-82. http://d.old.wanfangdata.com.cn/Periodical/ltlxsyycl201501012ZHANG J, XU D, ZHANG L. Research on density measurement based on background oriented schlieren method[J]. Jourmal of Experiments in Tluid Mechanics, 2015, 29(1):77-82.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/ltlxsyycl201501012 -

 下载:
下载:



计量
- 文章访问数: 3880
- HTML全文浏览量: 1856
- PDF下载量: 373
- 被引次数: 0
