


-
摘要: 针对当前空间红外弱小目标状态感知方法存在判别准确率低、人工干涉较多、对数据质量要求较高等问题,提出了一种全新的基于深度学习的判别算法。首先,对空间红外弱小目标状态变化进行了分析,并建立了专用数据集;然后,建立了目标状态感知任务专用的卷积神经网络框架,并在局部标注及自适应阈值等方面进行了创新;最后,应用实验室采集的目标辐射强度信息制作的仿真数据对本算法进行了训练和测试,建立了目标状态感知评估指标体系,并对实验结果进行评估。实验结果表明:在输入连续完整的辐射强度信息时,判别准确率为98.27%;输入片段辐射强度信息时,各状态判别准确率皆大于90%。本算法弥补了现有方法对空间弱小目标状态感知虚警率高和目标信息不完整时不敏感的缺陷,提高了检测速度和精度,可以更好地满足空间红外弱小目标感知任务的需求。Abstract: Aiming at the problems of low accuracy, high artificial interference and high data quality requirements of the current spatial infrared dim target state perception, a new deep learning-based discrimination algorithm is proposed. Firstly, the state change of weak spatial infrared dim target is analyzed and a special data set is established. Then, a convolutional neural network dedicated to target state perception is established and adjustments are made in its local annotations and adaptive threshold. Finally, simulation data is generated from the target's radiation intensity information that was collected in the laboratory and is used to train and test the algorithm. A target state perception evaluation indexing system is established to evaluate the experimental results. The experimental results show that the accuracy of this method is 98.27% when the continuous complete radiation intensity information is inputted. When the radiation intensity information of the segment is inputted, the accuracy of each state is greater than 90%. This algorithm makes up for the shortcomings of current methods, which are not sensitive to low false alarm rates and incomplete target information. It improves detection speed and accuracy and better satisfies the demand for spatial infrared weak target sensing tasks.
-
Key words:
- object detection /
- deep learning /
- dim target /
- infrared radiation intensity
-
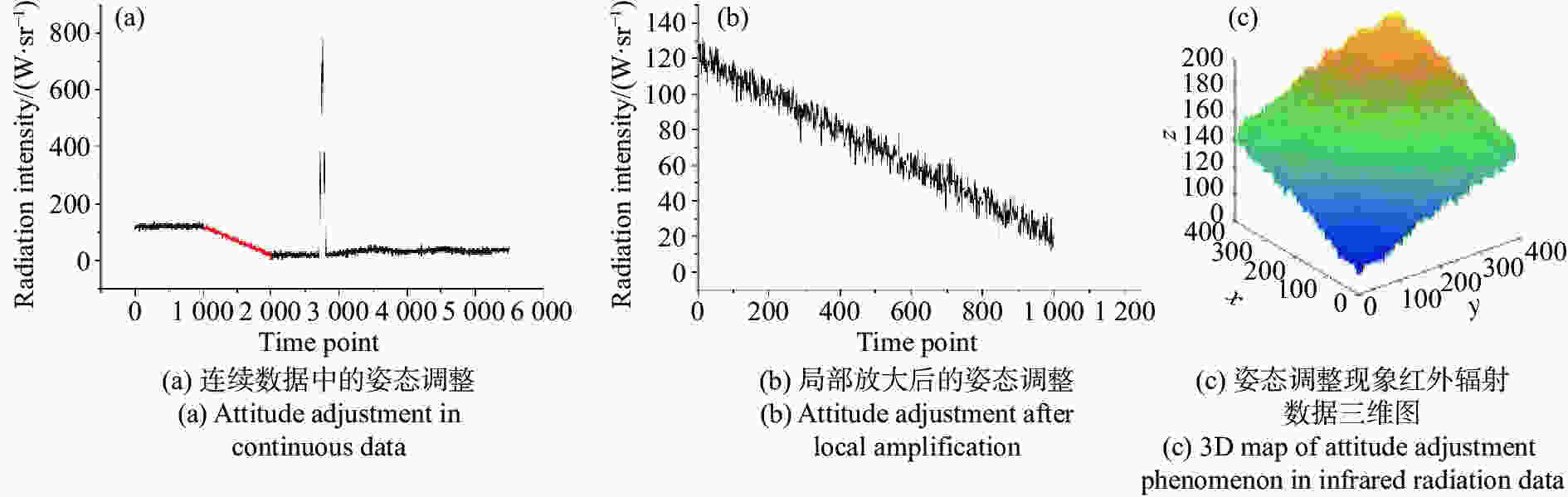
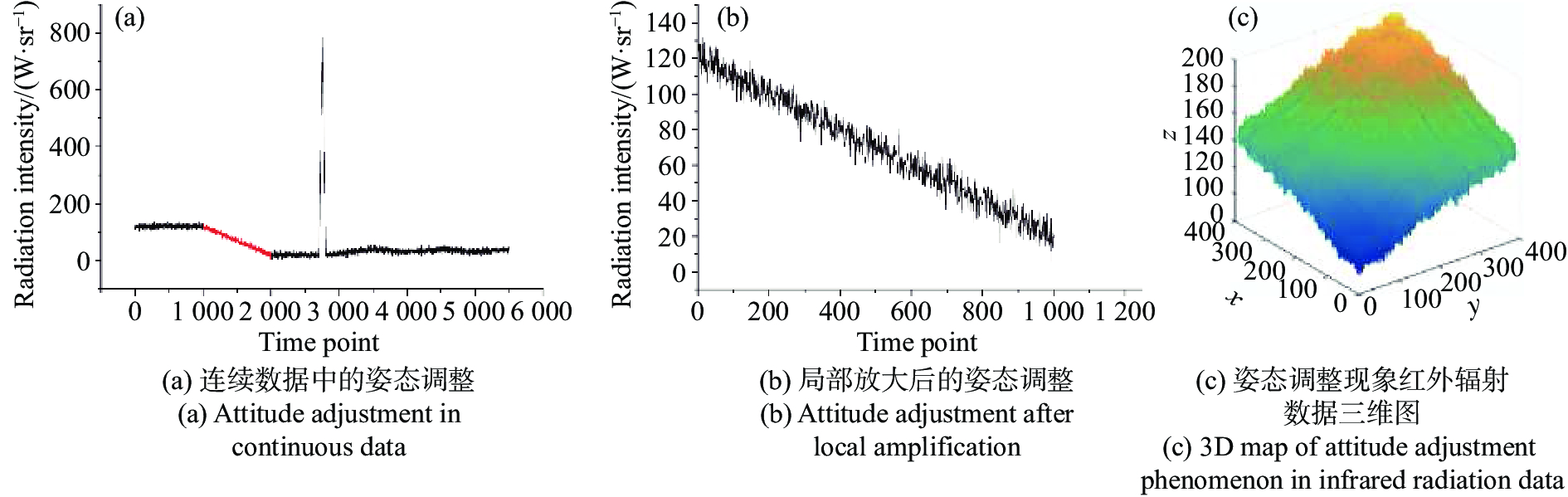
图 1 红外辐射数据中的目标姿态调整现象
Figure 1. Attitude adjustment of target in infrared radiation data
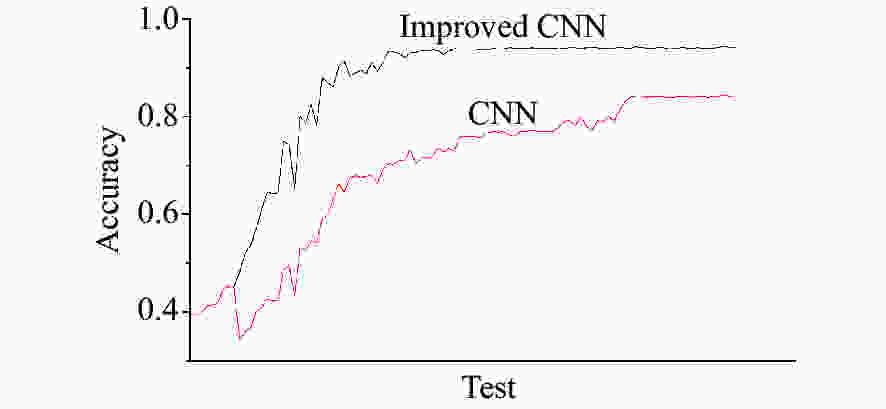
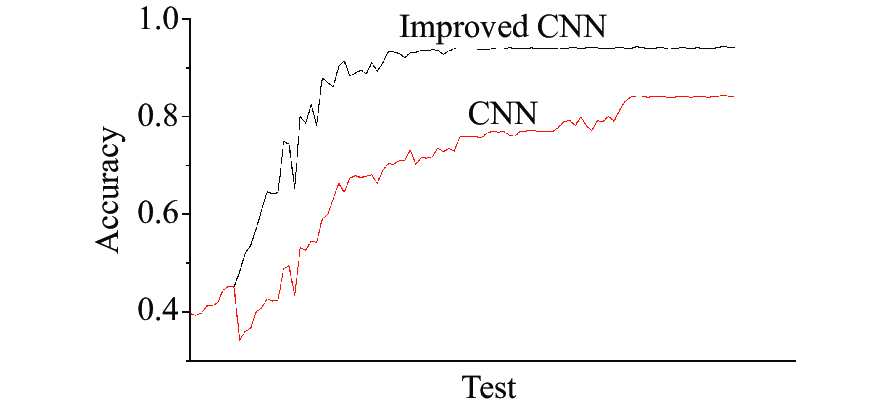
图 10 改进前后的CNN检测方法检测结果对比
Figure 10. Comparison of test results of CNN detection methods before and after improving
表 1 红外探测系统参数
Table 1. Parameters of infrared detection system
名称 相关参数 工作波长/μm 8.0~9.2 面阵规格 640×480 光学系统的入瞳直径/mm 650 探测器像元尺寸/μm 24×24 有效像元率 >99%  下载: 导出CSV
下载: 导出CSV
表 2 实验一模型检测性能
Table 2. Model detection performance of experiment 1
准确率/% 召回率/% 调和平均/% 检测速度/(s) 目标状态 98.87 99.62 98.73 0.921
下载: 导出CSV
表 3 实验二模型检测性能
Table 3. Model detection performance of experiment 2
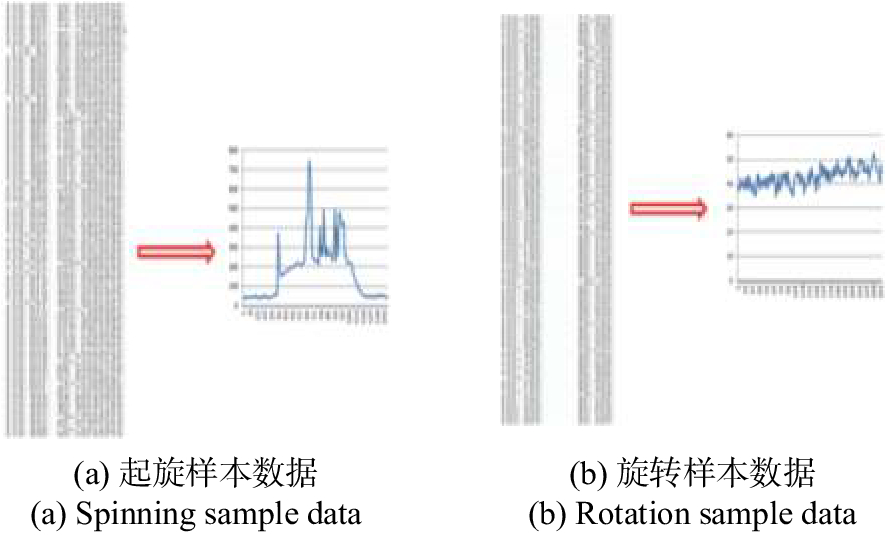
状态 准确率/% 召回率/% 调和平均/% 检测速度/(s) 姿态调整1 90.82 94.02 91.94 0.673 姿态调整2 91.29 94.33 93.16 0.589 起旋 98.87 99.45 99.21 0.421 旋转 92.66 95.39 93.71 0.755
下载: 导出CSV
-
[1] 王建立, 刘欣悦. 智能光学的概念及发展[J]. 中国光学,2013,6(4):437-488.WANG J L, LIU X Y. Concept and development of smart optics[J]. Chinese Optics, 2013, 6(4): 437-488. (in Chinese) [2] 李宁, 张云峰, 刘春香, 等. 1 m口径红外测量系统的辐射定标[J]. 光学 精密工程,2014,22(8):2054-2060. doi: 10.3788/OPE.20142208.2054LI N, ZHANG Y F, LIU CH X, et al. Calibration of 1 m aperture infrared theodolite[J]. Optics and Precision Engineering, 2014, 22(8): 2054-2060. (in Chinese) doi: 10.3788/OPE.20142208.2054 [3] 许伟琳, 武春风, 逯力红, 等. 基于光谱角时序不变性的红外目标识别[J]. 中国光学,2012,5(3):257-262.XU W L, WU CH F, LU L H, et al. IR target recognition based on invariant sequential spectral angle[J]. Chinese Optics, 2012, 5(3): 257-262. (in Chinese) [4] 李宁, 杨词银, 曹立华, 等. 3~5 μm红外焦平面阵列的辐射定标[J]. 光学 精密工程,2011,19(10):2319-2325. doi: 10.3788/OPE.20111910.2319LI N, YANG C Y, CAO L H, et al. Radiance calibration for 3~5 μm infrared focal plane array[J]. Optics and Precision Engineering, 2011, 19(10): 2319-2325. (in Chinese) doi: 10.3788/OPE.20111910.2319 [5] 梁华, 宋玉龙, 钱锋, 等. 基于深度学习的航空对地小目标检测[J]. 液晶与显示,2018,33(9):793-800.LIANG H, SONG Y L, QIAN F, et al. Detection of small target in aerial photography based on deep learning[J]. Chinese Journal of Liquid Crystal and Displays, 2018, 33(9): 793-800. (in Chinese) [6] 陈清江, 张雪, 柴昱洲. 基于卷积神经网络的图像去雾算法[J]. 液晶与显示,2019,34(2):220-227.CHEN Q J, ZHANG X, CHAI Y ZH. Image defogging algorithms based on multiscale convolution neural network[J]. Chinese Journal of Liquid Crystal and Displays, 2019, 34(2): 220-227. (in Chinese) [7] 周筑博, 高佼, 张巍, 等. 基于深度卷积神经网络的输电线路可见光图像目标检测[J]. 液晶与显示,2018,33(4):317-325.ZHOU ZH B, GAO J, ZHANG W, et al. Object detection of transmission line visual images based on deep convolutional neural network[J]. Chinese Journal of Liquid Crystal and Displays, 2018, 33(4): 317-325. (in Chinese) [8] 张博, 韩广良. 基于Mask R-CNN的ORB去误匹配方法[J]. 液晶与显示,2018,33(8):690-696.ZHANG B, HAN G L. ORB removal mis-matching method based on Mask R-CNN[J]. Chinese Journal of Liquid Crystal and Displays, 2018, 33(8): 690-696. (in Chinese) [9] 贠卫国, 史其琦, 王民. 基于深度卷积神经网络的多特征融合的手势识别[J]. 液晶与显示,2019,34(4):417-422.YUN W G, SHI Q Q, WANG M. Multi-feature fusion gesture recognition based on deep convolutional neural network[J]. Chinese Journal of Liquid Crystal and Displays, 2019, 34(4): 417-422. (in Chinese) [10] HARE S, GOLODETZ S, SAFFARI A, et al. Struck: structured output tracking with kernels[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2016, 38(10): 2096-2109. doi: 10.1109/TPAMI.2015.2509974 [11] UIJLINGS J R R, VAN DE SANDE K E A, GEVERS T, et al. Selective search for object recognition[J]. International Journal of Computer Vision, 2013, 104(2): 154-171. doi: 10.1007/s11263-013-0620-5 [12] 纪超, 黄新波, 刘慧英, 等. 融合连续区域特性和背景学习模型的显著计算[J]. 模式识别与人工智能,2018,31(4):300-309.JI CH, HUANG X B, LIU H Y, et al. Fusing continuous region characteristics and background learning model for saliency computation[J]. Pattern Recognition and Artificial Intelligence, 2018, 31(4): 300-309. (in Chinese) [13] 辛鹏, 许悦雷, 唐红, 等. 全卷积网络多层特征融合的飞机快速检测[J]. 光学学报,2018,38(3):0315003. doi: 10.3788/AOS201838.0315003XIN P, XU Y L, TANG H, et al. Fast airplane detection based on multi-layer feature fusion of fully convolutional networks[J]. Acta Optica Sinica, 2018, 38(3): 0315003. (in Chinese) doi: 10.3788/AOS201838.0315003 [14] 冯小雨, 梅卫, 胡大帅. 基于改进Faster R-CNN的空中目标检测[J]. 光学学报,2018,38(6):0615004. doi: 10.3788/AOS201838.0615004FENG X Y, MEI W, HU D SH. Aerial target detection based on improved faster R-CNN[J]. Acta Optica Sinica, 2018, 38(6): 0615004. (in Chinese) doi: 10.3788/AOS201838.0615004 [15] 廖祥文, 谢媛媛, 魏晶晶, 等. 基于卷积记忆网络的视角级微博情感分类[J]. 模式识别与人工智能,2018,31(3):219-229.LIAO X W, XIE Y Y, WEI J J, et al. Perspective level microblog sentiment classification based on convolutional memory network[J]. Pattern Recognition and Artificial Intelligence, 2018, 31(3): 219-229. (in Chinese) [16] 王文秀, 傅雨田, 董峰, 等. 基于深度卷积神经网络的红外船只目标检测方法[J]. 光学学报,2018,38(7):0712006. doi: 10.3788/AOS201838.0712006WANG W X, FU Y T, DONG F, et al. Infrared ship target detection method based on deep convolution neural network[J]. Acta Optica Sinica, 2018, 38(7): 0712006. (in Chinese) doi: 10.3788/AOS201838.0712006 -

 下载:
下载:





计量
- 文章访问数: 3110
- HTML全文浏览量: 1485
- PDF下载量: 184
- 被引次数: 0
